一種基于Viterbi法的改進瞬時轉(zhuǎn)速估計算法
2017-11-07 05:40:41劉永強郝高巖廖英英楊紹普
振動、測試與診斷 2017年5期
劉永強, 郝高巖, 廖英英, 楊紹普
(1.石家莊鐵道大學機械工程學院 石家莊,050043)(2.石家莊鐵道大學土木工程學院 石家莊,050043)
10.16450/j.cnki.issn.1004-6801.2017.05.025
一種基于Viterbi法的改進瞬時轉(zhuǎn)速估計算法
劉永強1, 郝高巖1, 廖英英3, 楊紹普1
(1.石家莊鐵道大學機械工程學院 石家莊,050043)(2.石家莊鐵道大學土木工程學院 石家莊,050043)
針對無轉(zhuǎn)速計的瞬時轉(zhuǎn)速估計問題及現(xiàn)有方法在抗噪、抗臨近階次和實時性方面的不足,基于Viterbi算法提出了一種改進型瞬時頻率估計(instantaneous frequency estimation,簡稱IFE)方法,并將其應用于變轉(zhuǎn)速工況下滾動軸承的瞬時轉(zhuǎn)速估計。將隱馬爾科夫模型中的Viterbi算法引入轉(zhuǎn)頻估計,分析了某一時頻平面中代價函數(shù)的計算次數(shù);根據(jù)歐幾里得距離函數(shù)的性質(zhì),提出了代價函數(shù)迭代循環(huán)停止的新型判定準則。該準則的優(yōu)點在于可以快速搜索時頻平面,尋找到最優(yōu)的局部路徑,提高了IFE精度和計算速度。通過仿真信號和實驗數(shù)據(jù)對該算法進行驗證。結(jié)果表明:改進后算法效率明顯提高,和基于峰值搜索IFE方法相比,改進的Viterbi-IFE方法具有較高的精度和穩(wěn)定性。
滾動軸承; 振動信號; 瞬時頻率估計; Viterbi算法; 代價函數(shù)
引 言
階次分析為變轉(zhuǎn)速工況下滾動軸承故障診斷的重要方法之一[1],該方法中的關(guān)鍵問題就是準確追蹤參考軸轉(zhuǎn)速。一般情況下可采用轉(zhuǎn)速計等硬件裝置測量轉(zhuǎn)速,但在某些復雜工況下轉(zhuǎn)速計等鍵相裝置不易安裝,難以跟蹤參考軸轉(zhuǎn)速。針對該問題本研究改進了瞬時頻率估計方法,從測量的振動信號中提取出轉(zhuǎn)頻信息,繼而實現(xiàn)無需轉(zhuǎn)速計的階次分析。
陳平等[2]研究了基于MUSIC的瞬時頻率估計方法,但存在相位重疊且只適用于單分量信號;為實現(xiàn)無轉(zhuǎn)速計的階次跟蹤,郭瑜等[3-5]提出對采集的振動信號進行短時傅里葉變換得到時-頻圖,再通過局部峰值搜索獲得瞬時頻率(instantaneous frequency,簡稱IF),但該方法的抗噪性及抗臨近階次的能力不足;趙曉平等[6-7]提出基于Viterbi算法的瞬時頻率估計方法,但由于該算法較復雜,運算時間較長,無法滿足實時分析的要求。Leclere等[8]提出了一種瞬時轉(zhuǎn)速估計算法,不需要進行先驗假設(shè),而是由信號瞬時譜產(chǎn)生的概率密度函數(shù)來確定轉(zhuǎn)速信息。基于瞬時時間尺度因子估計,Combet等[9]提出了一種瞬時轉(zhuǎn)速相對波動估計方法,該方法采用峭度最大值法獲得分析信號的最佳長度,基于短時尺度變換估計瞬時轉(zhuǎn)速信息。Urbanek等[10]基于相空間重構(gòu)和時頻分析,提出一種兩步法用于估計瞬時頻率,可處理劇烈波動的轉(zhuǎn)速或復雜譜特征信號,但這些算法大多對抗臨近階次和實時性方面沒有過多要求。
針對目前算法的不足,筆者研究了Viterbi算法的路徑尋優(yōu)過程及其迭代次數(shù),改進了該算法的尋優(yōu)方法,并提出了迭代循環(huán)停止的新型判定準則。改進后的方法提高了瞬時頻率的估算精度和計算速度,為實現(xiàn)無轉(zhuǎn)速計的實時階次跟蹤打下基礎(chǔ)。
1 基于Viterbi算法IFE的理論基礎(chǔ)
Viterbi算法是針對隱馬爾科夫模型提出的[11]:給出一個觀測序列O1,O2,O3,…,希望找到觀測序列背后的隱藏狀態(tài)序列P1,P2,P3,…,可采用動態(tài)規(guī)劃的方法來尋找出現(xiàn)概率最大的隱藏狀態(tài)序列。
基于Viterbi算法的IFE方法的基本思想來源于數(shù)字圖像處理中的邊線追蹤(edge-following)算法[12],其原理是連接地圖(時頻平面)上的點,使這些點形成的路徑的長度值和高度變化值之和盡可能小,這和隱馬爾科夫模型中尋找觀測序列背后最可能的隱藏狀態(tài)序列相同[13]。
在一個由N組時間點和M組頻率點組成的時頻網(wǎng)格中,求出從第一組時間點到最后一組時間點的最優(yōu)路徑。設(shè)相鄰時間點n1,n2之間的所有路徑集合為K。n1,n2之間的最佳路徑表達式為
(1)
其中:p(k(n);n1,n2)為沿路徑k(n)的代價函數(shù),其為g(x,y)和f(x)之和,時間從n1到n2;函數(shù)g(x,y)=g(|x-y|)為關(guān)于|x-y|的非增函數(shù),其中x和y分別為路徑k(n)和k(n-1)所處的網(wǎng)格位置頻率編號,則g(x,y)表示x、y兩個連續(xù)時間點之間的距離;f(x)為關(guān)于x=Sf(n,k(n))的非減函數(shù),其中函數(shù)Sf(x,y)為短時傅里葉變換(shorttimeFouriertransformation,簡稱STFT)后所得時頻平面的幅值。
通過這樣的定義,時頻平面中的頻率點所對應的STFT值越大,其成為瞬時頻率估計點的概率就越大。函數(shù)f(x)定義如下:考慮時刻n,把該時刻的STFT值Sf(n,w)按從大到小的順序排列
Sf(n,ω1)≥Sf(n,ω2)≥…≥Sf(n,ωj)≥
…≥Sf(n,ωM)
(2)
其中:j∈[1,M],M為信號頻率點數(shù)。
f(x)定義為f(Sf(n,ωj))=j-1,該定義使IFE值第j個最大值的概率隨著j的增大而線性降低,可保證Sf(n,w)的較大者作為估計結(jié)果[14]。
下面對g(x,y)的形式進行討論。假設(shè)信號在持續(xù)時間范圍內(nèi)IF值沒有發(fā)生突變,可將g(x,y)的形式表達為
(3)
若整個信號持續(xù)時間范圍內(nèi)IF有突變點,g(x,y)的形式為
(4)
分析式(3),(4),當兩連續(xù)時間點的IF變化小于Δ1,此時距離函數(shù)g(x,y)為零,沒有距離函數(shù)引起的代價。當Δ1→∞時,此時g(x,y)恒為零,估計結(jié)果為STFT的最大值。當兩連續(xù)點的瞬時頻率有突變時,即|x-y|>Δ2,g(x,y)=c(Δ2-Δ1),此時g(x,y)不為|x-y|的函數(shù),而為定值c(Δ2-Δ1),將距離函數(shù)限制在一定范圍內(nèi),準確追蹤到突變點。另外,c和Δ的選擇需要根據(jù)預提取信號的波動情況而定,波動越大Δ越大。
2 基于Viterbi算法的改進
2.1 改進的迭代算法
在一個由M組頻率點和Q組時間點組成的時頻網(wǎng)格中,即T={(ni,ωj)|i∈[1,Q],j=[1,M]},整個時頻平面需要計算的路徑總數(shù)為MQ,但在點數(shù)比較多的情況下,計算量非常大,實現(xiàn)起來難度很大。文中采用迭代方法簡化計算,并提出代價函數(shù)循環(huán)停止的判定準則,改進的迭代過程如下。
1) 假設(shè)從時刻n1到時刻(ni,ωj)的最優(yōu)路徑Li(n,ωj)已經(jīng)確定,最優(yōu)路徑表達式為

(5)
其中:n∈[n1,ni];j∈[1,M];Kij為從n1到(ni,ωj)的路徑的集合;p(k(n);n1,(ni,ωj))為沿路徑k(n)的代價函數(shù),最優(yōu)路徑為代價函數(shù)最小的那條。
這里對于ni時刻的不同的頻率點,均存在一條最優(yōu)路徑,共M條最優(yōu)路徑。則在時間段[n1,ni]中,估計的瞬時頻率曲線就取M條最優(yōu)路徑中代價函數(shù)最小的那條。表達式為

(6)
2) 迭代到下一點ni+1的局部最優(yōu)路徑可以表示為
Li+1(n,ωj)=[Li(n,ωl),(ni+1,ωj)]
(j∈[1,M];l∈[1,M])
(7)
新的代價函數(shù)為
p(li+1(n,ωl);n1,(ni+1,ωj))=
p(Li(n,ωl);n1,(ni,ωj))+g(ωl,ωj)+
f(Sf(ni+1,ωj))
(8)
最優(yōu)路徑取代價函數(shù)值最小的路徑。這里Li+1(n;ωj)對于不同頻率點也存在M個局部最優(yōu)路徑。任一時刻均有M個頻率點,計算每個頻率點的局部最優(yōu)路徑需要計算M次,因此計算出該時刻所有點的局部最優(yōu)路徑共計算M2次,對于整個時頻平面Q組時間點,共計算(Q-1)×M2次,遠遠小于之前MQ的計算量。
為了進一步減小計算量,觀察代價函數(shù)表達式(8),p(Li(n;ωl);n1,(ni,ωj))為前ni組時間點局部最優(yōu)路徑的代價函數(shù),g(ωl,ωj)為歐幾里得距離|ωl-ωj|的單調(diào)增函數(shù)。計算局部最優(yōu)路徑時,如果每組時間點中的每個頻率點ωj(j∈[1,M])不變,那么所對應的函數(shù)值f(Sf(ni+1,ωj))不變。因此采用以下步驟進一步減小計算量。
①令ρ=Δ;


3) 按步驟2)計算每個頻率點的局部最優(yōu)路徑。將該時間點的最優(yōu)路徑代價函數(shù)作為結(jié)果,帶入下一時間點代價函數(shù)的計算中,依次迭代,求出整個時頻平面的最優(yōu)路徑。
2.2 迭代算法仿真算例
假設(shè)由M=8和Q=3組成的時頻網(wǎng)格的一個元素為fij=f(Sf(ni,wj)),如圖1所示。

圖1 M=8,Q=3迭代過程仿真算例Fig.1 Iterative process when M=8,Q=3
由式(3)計算g(ωi,ωj)=gij,其中c=2.5,Δ=1。連接某時刻的某一頻率點與其前一時刻距離最近的3個頻率點,即|i-j|≤1時,gij=0。當|i-j|>1時,gij=2.5×|i-j|。



3 算法驗證
3.1 線性掃頻信號驗證
在軸承故障診斷中,軸承振動信號為含噪聲的多分量信號,經(jīng)過預處理后其噪聲仍然很大,且可能出現(xiàn)臨近階次。為檢驗基于Viterbi算法的IFE方法的抗噪和抗臨近階次能力,采用仿真信號進行研究,其瞬時頻率如式(9)所示。
ω(t)=2.5πt+30π
(9)
通過該頻率調(diào)制規(guī)律來仿真滾動軸承升速工況振動信號,其多分量信號模型[15]為

(10)
其中:η(t)為高斯白噪聲;信噪比為-9 dB。
時域波形如圖2所示。轉(zhuǎn)頻從15 Hz線性變化到40 Hz,持續(xù)時間20 s。仿真模型中包含轉(zhuǎn)頻的一倍頻,幅值為1;0.66倍頻,幅值為0.8;0.5倍頻,幅值為0.7。STFT時頻圖如圖3所示,可以觀察到由于噪聲影響,各倍頻分量并不突出。

圖2 線性掃頻時域信號Fig.2 Linear sweep frequency signal in time domain
分別采用局部峰值搜索算法和基于Viterbi算法的IFE方法提取轉(zhuǎn)頻,結(jié)果如圖4所示。圖中星點線為基于Viterbi算法的IFE方法得到的轉(zhuǎn)頻曲線,短畫線為局部峰值搜索法得到的轉(zhuǎn)頻曲線,實線為理論轉(zhuǎn)頻曲線。
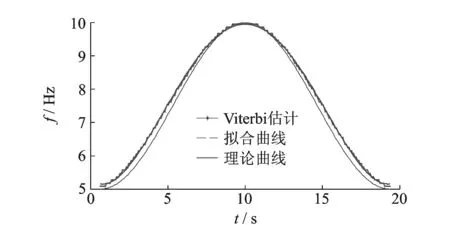
圖4 線性掃頻信號IFE結(jié)果對比圖Fig.4 IFE results comparison for linear sweep frequency signal
根據(jù)式(11)求兩種算法的瞬時頻率估計值相對于理論值的百分比誤差。
(11)

局部峰值搜索算法的誤差ξ=43.4%,基于Viterbi算法的IFE誤差ξ=3.11%。可以看出在高噪聲和出現(xiàn)臨近階次的情況下,局部峰值搜索算法已經(jīng)失效,抗噪和抗臨近階次的能力有限。而基于Viterbi算法的IFE結(jié)果具有很高的精度,在較高噪聲干擾下仍可精確進行估計。
3.2 正弦掃頻信號
仿真強噪聲環(huán)境下的正弦掃頻信號,并計算其相對于理論值的百分比誤差。瞬時頻率由式(12)給出。
ω(t)=2π(7.5-2.5cos(t))t=[0,2π]
(12)
正弦掃頻信號模型如式(13)所示,其中包含1,2,4階三個分量[15]。
(13)
其中:η(t)為高斯白噪聲;信噪比為-3 dB;采樣率為100 Hz。
轉(zhuǎn)頻呈正弦規(guī)律變化,仿真模型中包含轉(zhuǎn)頻的一倍頻,即一階分量,幅值為1;二階分量,幅值為0.6;四階分量,幅值為0.4。STFT時頻譜如圖5所示。
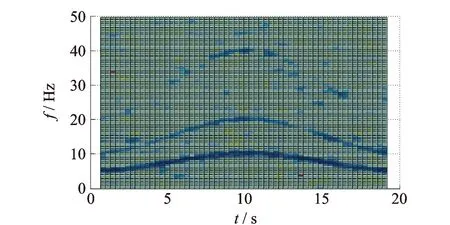
圖5 正弦掃頻信號STFT譜圖Fig.5 STFT for sinusoidal sweep frequency signal
現(xiàn)采用基于Viterbi算法的IFE方法提取第一個分量,結(jié)果如圖6所示。點線為采用Viterbi算法估計的瞬時頻率連線;粗實線為將瞬時頻率點采用5次多項式擬合得到的頻率曲線;短劃線為理論頻率曲線。可以看到點線相對于理論值在局部存在一定誤差,出現(xiàn)突變點,但轉(zhuǎn)速通常為平穩(wěn)連續(xù)變化,因此這里采用低階多項式進行擬合,得到比較平滑的估計曲線。擬合曲線相對于理論曲線的百分比誤差為ξ=3.45%,可以得出,基于Viterbi算法的IFE方法可以精確估計瞬時轉(zhuǎn)頻,具有較好的抗噪性和抗臨近階次的能力。
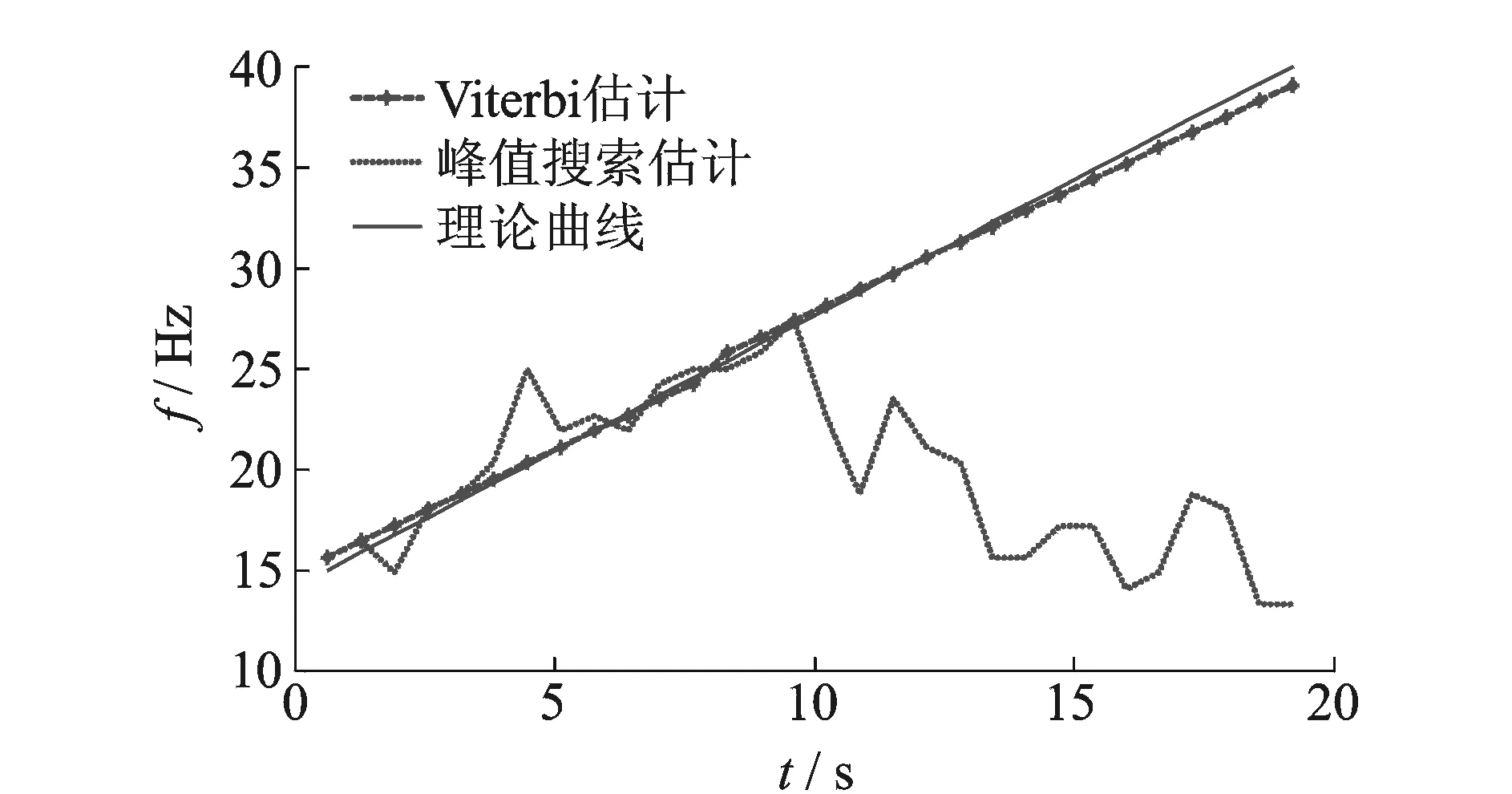
圖6 正弦掃頻信號IFE結(jié)果Fig.6 IFE results for sinusoidal sweep frequency signal
3.3 實驗信號
采用QPZZ-Ⅱ型旋轉(zhuǎn)機械振動及故障模擬實驗平臺進行變轉(zhuǎn)速振動測試試驗,實驗臺如圖7所示。

圖7 旋轉(zhuǎn)機械振動及故障模擬實驗臺Fig.7 Test rig of rotating machinery vibration and fault simulation
實驗采用NI PXIe 4496數(shù)據(jù)采集設(shè)備,采用PCB 355B03型壓電加速度傳感器測量振動信號,采樣頻率為25.6 kHz;采用PCB LaserTach ICP型激光轉(zhuǎn)速傳感器測量參考軸轉(zhuǎn)速,采樣頻率為1 kHz。根據(jù)轉(zhuǎn)速脈沖信號采用5點公式法[16]計算參考軸的瞬時轉(zhuǎn)頻,并將該方法測得的轉(zhuǎn)頻作為參考值。
實驗中軸承節(jié)圓直徑D=38.5 mm,滾子直徑d=7.2 mm,滾子個數(shù)Z=13,接觸角α=0。根據(jù)外圈故障特征頻率計算公式,得外圈故障特征階次為
Obpo=Z[1-d/Dcos(α)]/2≈5.284
(14)
模擬轉(zhuǎn)速劇烈波動工況,原始振動信號如圖8所示。根據(jù)軸承故障診斷實驗平臺振動信號的特點,采用共振解調(diào)方法進行故障特征提取。采集信號通過包絡(luò)解調(diào)就可以得出隨轉(zhuǎn)速變化的低頻幅值包絡(luò)信號。

圖8 原始時域振動信號Fig.8 Original vibration signal in time domain
為提取低頻區(qū)段內(nèi)的轉(zhuǎn)速信息,對信號進行低通濾波和降采樣處理,低通濾波截止頻率設(shè)定為1 500 Hz,降采樣倍數(shù)為5,降采樣后的采樣率為5 120 Hz。然后對降采樣后的數(shù)據(jù)進行Hilbert包絡(luò)并去趨勢項得預處理振動信號。預處理振動信號STFT譜圖如圖9所示。
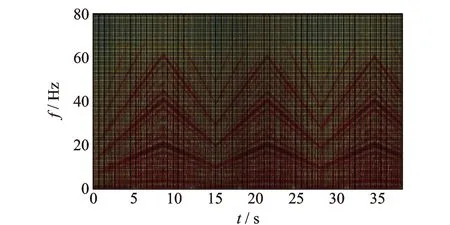
圖9 振動信號STFT時頻譜圖Fig.9 STFT for the rolling bearing vibration signal
根據(jù)軸承故障特征頻率計算公式可看出,故障特征階次一倍頻的峰值在時頻譜圖中最突出,因此將其作為搜索目標。
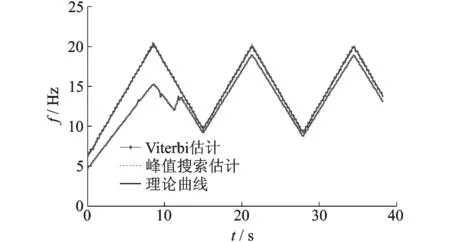
圖10 Viterbi法、峰值搜索法、轉(zhuǎn)速計測得結(jié)果對比圖Fig.10 Comparison of the results from Viterbi-IFE、Peaksearch-IFE and the tachometer
對圖9進行基于Viterbi算法的轉(zhuǎn)頻估計,得到估計結(jié)果,如圖10所示。圖中實線為采用激光轉(zhuǎn)速計測量轉(zhuǎn)速脈沖計算得到的參考軸瞬時頻率曲線,星點線為基于Viterbi算法所估計出的轉(zhuǎn)頻曲線,點虛線為采用峰值搜索算法估計的轉(zhuǎn)速曲線。可以看出,Viterbi-IFE和轉(zhuǎn)速計測得轉(zhuǎn)速曲線基本一致,而峰值搜索在局部出現(xiàn)較大偏差。求估計瞬時頻率值相對于參考值的百分比誤差,根據(jù)公式(9)計算,峰值搜索誤差為8.5%,Viterbi-IFE估計誤差僅為0.71%。
分別采用改進前與改進后的Viterbi算法對實驗信號STFT譜圖進行瞬時頻率估計,其代價函數(shù)迭代過程所用時間如表1所示。計算時統(tǒng)一采用MATLAB編程,硬件為DELL筆記本電腦,4核Core i5處理器,主頻1.80 GHz。在表1中,將式(10)所示的線性掃頻信號和式(13)所示的正弦掃頻信號同時考慮在內(nèi),分別采用改進前與改進后的Viterbi算法對該兩組信號STFT譜圖進行瞬時頻率估計。從表1中可知,在仿真信號和實驗信號驗證中,使用相同計算資源的前提下,改進后的Viterbi算法計算效率得到明顯提升。尤其是實驗信號,無判定準則的Viterbi-IFE用時1.45 s,有判定準則的改進Viterbi-IFE用時降至0.52 s。整個轉(zhuǎn)速變化過程持續(xù)時間為38 s,而進行轉(zhuǎn)頻估計的迭代計算過程用時0.52 s,從響應的及時性分析,該算法可以滿足實時分析的要求。
表1 改進前后迭代計算所用時間
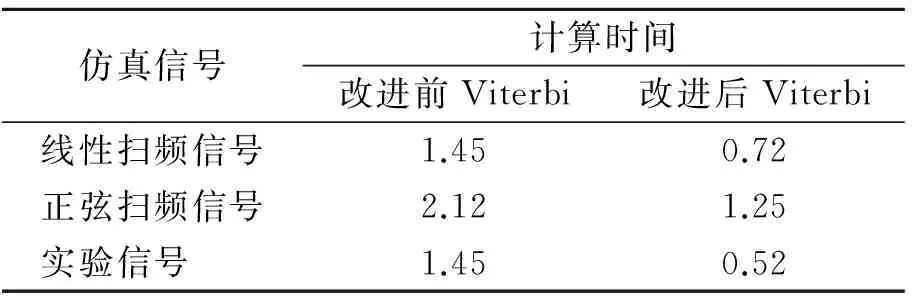
Tab.1 The time used for the iterative calculation before and after the improvement s
4 結(jié)束語
基于振動信號的瞬時轉(zhuǎn)速估計使無轉(zhuǎn)速計的軸承狀態(tài)監(jiān)測和故障診斷成為可能,其中基于振動信號STFT譜圖的局部峰值搜索IFE方法是比較早的方法,但其抗噪性和抗臨近階次的能力有限。筆者研究了基于Viterbi算法的IFE方法,并分析了代價函數(shù)的迭代過程和次數(shù),在此基礎(chǔ)上,提出了代價函數(shù)迭代循環(huán)停止的新型判定準則,該準則可以實現(xiàn)時頻平面最優(yōu)路徑的快速搜索,提高了瞬時頻率的估算精度和計算速度。通過仿真信號和實驗數(shù)據(jù)進行驗證,具有判定準則的改進后算法較改進前算法的效率明顯提高,為無轉(zhuǎn)速計的軸承狀態(tài)監(jiān)測和故障診斷奠定了基礎(chǔ)。
[1] 趙曉平,張令彌,郭勤濤. 旋轉(zhuǎn)機械階比跟蹤技術(shù)研究進展綜述[J]. 地震工程與工程振動, 2008, 28(6): 213-219.
Zhao Xiaoping, Zhang Lingmi, Guo Qintao. Advances and trends in rotational machine order tracking methodology[J]. Journal of Earthquake Engineering and Engineering Vibration, 2008, 28(6): 213-219. (in Chinese)
[2] 陳平. 信號瞬時頻率的估計方法及其應用[D].濟南:山東大學, 2007.
[3] 郭瑜,秦樹人,湯寶平,等. 基于瞬時頻率估計的旋轉(zhuǎn)機械階比跟蹤[J]. 機械工程學報,2003, 39(3): 32-36.
Guo Yu, Qin Shuren, Tang Baoping, et al. Order tracking of rotating machinery based on instantaneous frequency estimation[J]. Journal of Mechanical Engineering, 2003, 39(3): 32-36. (in Chinese)
[4] 胡愛軍,朱瑜. 基于改進峰值搜索法的旋轉(zhuǎn)機械瞬時頻率估計[J]. 振動與沖擊,2013, 32(7): 113-117.
Hu Aijun, Zhu Yu. Instantaneous frequency estimation of a rotating machinery based on an improved peak search method[J]. Journal of Vibration and Shock, 2013, 32(7): 113-117. (in Chinese)
[5] 楊志堅,丁康,梁茜. 基于頻譜校正理論的階比跟蹤分析[J]. 機械工程學報,2009, 45(12): 41-45.
Yang Zhijian, Ding Kang, Liang Qian. Novel method of order tracking analysis based on spectrum correction[J]. Journal of Mechanical Engineering, 2009, 45(12): 41-45. (in Chinese)
[6] 趙曉平. 旋轉(zhuǎn)機械階比分析研究與軟件實現(xiàn)[D]. 南京:南京航空航天大學, 2008.
[7] 趙曉平,趙秀莉,侯榮濤,等. 一種新的旋轉(zhuǎn)機械升降速階段振動信號瞬時頻率的估計算法[J]. 機械工程學報, 2011, 47(7): 104-108.
Zhao Xiaoping, Zhao Xiuli, Hou Rongtao, et al. A new method for instantaneous frequency estimation of run-up or run-down vibration signal for rotating machinery[J]. Journal of Mechanical Engineering, 2011, 47(7): 104-108. (in Chinese)
[8] Leclere Q, André H, Antoni J. A multi-order probabilistic approach for Instantaneous Angular Speed tracking debriefing of the CMMNO′14 diagnosis contest[J]. Mechanical Systems and Signal Processing, 2016(81): 375-386.
[9] Combet F, Zimroz R. A new method for the estimation of the instantaneous speed relative fluctuation in a vibration signal based on the short time scale transform[J]. Mechanical Systems and Signal Processing, 2009, 23(4): 1382-1397.
[10] Urbanek J, Barszcz T, Antoni J. A two-step procedure for estimation of instantaneous rotational speed with large fluctuations[J]. Mechanical Systems and Signal Processing, 2013, 38(1): 96-102.
[11] Viterbi A. Error bounds for convolutional codes and an asymptotically optimum decoding algorithm[J]. IEEE Transactions on Information Theory, 1967,13(2):260-269.
[12] Martell A. Edge detection using heuristic search methods[J]. Comput, Graphic,Image Process, 1982,1(2): 69-182.
[13] 陳源,江修富. Viterbi算法的關(guān)鍵問題研究及DSP實現(xiàn)[J]. 裝備指揮技術(shù)學院學報, 2005,16(5):77-81.
Chen Yuan, Jiang Xiufu. Study on the main problems of viterbi algor ithm and the realization of DSP[J]. Journal of the Academy of Equipment Command & Technology, 2005,16(5):77-81. (in Chinese)
[14] 胡旭娟,梁紅,蒯繼武. 改進WVD的調(diào)頻信號瞬時頻率估計算法[J]. 彈箭與制導學報, 2007, 27(5): 329-334.
Hu Xujuan, Liang Hong, Kuai Jiwu. FM Signal IF estimation algorithm based on improved WVD[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2007, 27(5): 329-334. (in Chinese)
[15] 戴功偉. 基于自適應轉(zhuǎn)頻跟蹤濾波的旋轉(zhuǎn)機械階次析研究[D]. 重慶:重慶大學,2013.
[16] 魏玉果. 基于自適應計算階次跟蹤的旋轉(zhuǎn)機械階次分析系統(tǒng)[D].重慶:重慶大學, 2007.
國家自然科學基金資助項目(11572206,11472179,U1534204,11372199);河北省自然科學基金資助項目(A2015210005,A2016210099);河北省人才工程培養(yǎng)經(jīng)費資助科研項目(A2016002036)
2016-09-13;
2017-01-18
TH165.3

劉永強,男,1983年12月生,副教授、博士生導師。主要研究方向為車輛系統(tǒng)動力學、機車狀態(tài)監(jiān)測與故障診斷。曾發(fā)表《一種自適應共振解調(diào)方法及其在滾動軸承早期故障診斷中的應用》(《振動工程學報》 2016年第29卷第2期)等論文。
E-mail:liuyq@stdu.edu.cn
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
