并聯(lián)型骨外固定器在上肢畸形矯正中的應(yīng)用
2017-11-13 08:34:26魏夢婷張習(xí)帥
河北工業(yè)大學(xué)學(xué)報 2017年5期
魏夢婷,張習(xí)帥,孫 昊,2
(1.河北工業(yè)大學(xué) 控制科學(xué)與工程學(xué)院,天津 300130;2.河北工業(yè)大學(xué) 智能康復(fù)裝置與檢測技術(shù)教育部工程研究中心,天津300130)
并聯(lián)型骨外固定器在上肢畸形矯正中的應(yīng)用
魏夢婷1,張習(xí)帥1,孫 昊1,2
(1.河北工業(yè)大學(xué) 控制科學(xué)與工程學(xué)院,天津 300130;2.河北工業(yè)大學(xué) 智能康復(fù)裝置與檢測技術(shù)教育部工程研究中心,天津300130)
常規(guī)的串聯(lián)型骨外固定器無法治療多維畸形的同期矯正.因此,將6-DOF并聯(lián)型機器人與骨外固定技術(shù)相結(jié)合,應(yīng)用于治療復(fù)雜上肢畸形,可同時矯正四維畸形.而此技術(shù)存在人為主觀上無法計算各驅(qū)動桿伸縮量及觀測畸形骨段狀態(tài)信息的問題.由此自主開發(fā)配套計算機軟件.醫(yī)生將由術(shù)后X線片測量的相關(guān)參數(shù)輸入軟件,通過計算機進行數(shù)學(xué)運算生成6根驅(qū)動桿每日調(diào)節(jié)量的電子處方,從而指導(dǎo)醫(yī)生及患者通過漸進的調(diào)整驅(qū)動桿伸長或短縮來完成畸形矯正.同時,對整個矯正過程進行位姿三維仿真,使醫(yī)生能夠直觀的分析畸形狀態(tài).臨床實驗結(jié)果表明,使用并聯(lián)型骨外固定器進行上肢畸形矯正獲得了理想的治療效果.應(yīng)用此技術(shù)提高了醫(yī)護人員的工作效率和畸形矯正的調(diào)整精度,使得畸形矯正過程簡單化、精準化、數(shù)字化.
并聯(lián)機構(gòu);6-DOF;虛擬現(xiàn)實技術(shù);骨外固定器;畸形矯正
上肢畸形[1]矯正一直是骨外科醫(yī)生面臨的最為棘手的問題之一.上肢的功能及解剖尤其復(fù)雜,從肩部到手上肢關(guān)節(jié)鏈可實現(xiàn)多個活動自由度.肘關(guān)節(jié)的屈伸及同步的前臂旋前旋后是上肢功能中最重要的一個.上肢的畸形矯正、功能重建與下肢相比,要求手術(shù)創(chuàng)傷小,固定時間短,盡量少的干擾前臂的旋轉(zhuǎn)與手的靈活運動功能.而傳統(tǒng)的串聯(lián)型Ilizarov骨外固定技術(shù)[2-3]只能實現(xiàn)單一平面上位移或角度的調(diào)整.在矯正多維畸形時通常會出現(xiàn)有殘留畸形的情況,此時需要進行框架調(diào)整及部件的置換,每次框架的重新安裝都是一個勞動量相當大的過程,甚至可能導(dǎo)致二次位移,已經(jīng)遠遠不能滿足日益重視的精準醫(yī)療理念.因此迫切需要一種先進的醫(yī)療設(shè)備,能夠精準、高效地幫助患者進行畸形矯正.
六自由度(Six Degrees of Freedom,6-DOF)并聯(lián)機器人不僅具有位姿精度高、結(jié)構(gòu)緊湊、承載能力強等優(yōu)點[4-5],而且可實現(xiàn)三維空間中六自由度運動[6-7].目前在國內(nèi),六自由度在畸形矯正領(lǐng)域處于初步發(fā)展階段,技術(shù)很不成熟.而在國外,以Taylor空間外固定器[8]為代表,但是其價格昂貴,且需要具備專業(yè)技能的醫(yī)生才能使用,它尚未成為常規(guī)醫(yī)療設(shè)備.在傳統(tǒng)正骨手法[9]的基礎(chǔ)上,將6-DOF并聯(lián)型機器人技術(shù)與骨外固定技術(shù)相結(jié)合為并聯(lián)型骨外固定器,應(yīng)用于上肢畸形矯正,通過對任何一種畸形狀態(tài)進行六軸分析[10],完成成角、移位、旋轉(zhuǎn)、短縮或分離等多維畸形[11]的同期矯正.但在矯正過程中存在2個問題:一方面,6-DOF并聯(lián)機構(gòu)的位姿是6根驅(qū)動桿協(xié)同工作的結(jié)果,而人為主觀上無法計算6根驅(qū)動桿的伸縮量;另一方面,由于可視信息的局限性,無法看到矯正過程中的內(nèi)部結(jié)構(gòu).因此,通過設(shè)計畸形矯正算法,開發(fā)配套計算機軟件,生成能夠指導(dǎo)醫(yī)生及患者進行桿長調(diào)節(jié)的電子處方,并引入VRML技術(shù),對畸形矯正過程進行三維仿真,便于醫(yī)生觀察并聯(lián)型骨外固定器及畸形骨段的位姿狀態(tài).
1 畸形矯正原理
首先,醫(yī)生選取畸形骨參照斷裂處的近端或遠端為參照骨段,則另一端為移動骨段.然后手術(shù)安裝參照環(huán),使之與參照骨段骨干縱軸垂直,安裝移動環(huán)于移動骨段在患者舒適的位置,2個環(huán)分別與對應(yīng)的骨段成為2個整體.最后連接6根驅(qū)動桿后拍攝正側(cè)位X線片.以起始點為原點建立全局坐標系,對畸形狀態(tài)進行六軸分析,并測量畸形參數(shù)、框架參數(shù)及初始桿長參數(shù),將測量后的數(shù)據(jù)輸入計算機軟件,生成驅(qū)動桿每日調(diào)節(jié)量的電子處方.通過同時調(diào)整6根驅(qū)動桿的伸長量從而改變移動環(huán)的位姿,使其帶動移動骨段進行與參照骨段間的相對運動,達到畸形矯正的目的.
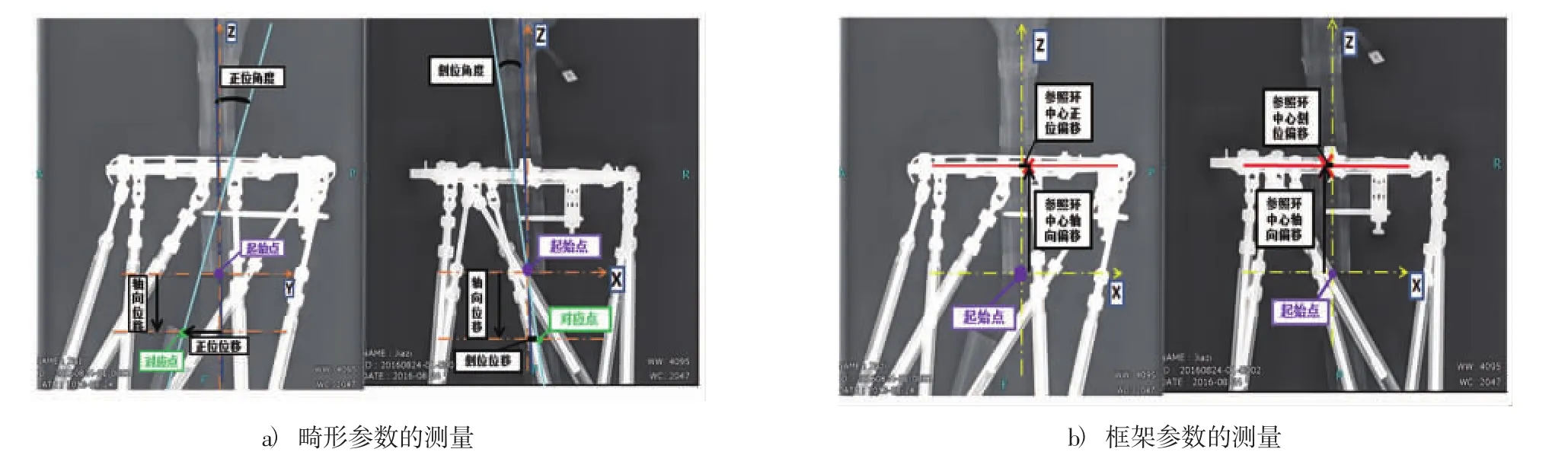
圖1 參數(shù)測量Fig.1 Parameter measurement
2 畸形矯正算法
2.1 數(shù)學(xué)模型
分別以參照環(huán)和移動環(huán)的中心為原點,建立笛卡爾右手局部坐標系{P}和{B}.Xp軸正方向指向p1、p2的連線,Zp軸垂直于參照環(huán)指向上.Xb軸正方向指向b1、b2的連線,Zb軸垂直于移動環(huán)指向上.定義pi與Xp軸的夾角為λi,bi與Xb軸的夾角為Λi,參照環(huán)與移動環(huán)短邊所對中心角分別為θp與θb.則pi點和bi點的位置向量分別為:

式中:i=1,2,…,6;rp和rb分別為參照環(huán)和移動環(huán)外接圓的半徑.
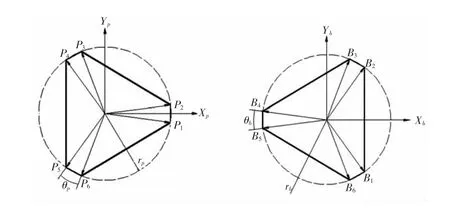
圖2 參照環(huán)和移動環(huán)各連接點定義Fig.2 Definitions of the connection points in the reference ring and the moving ring
定義6-DOF并聯(lián)機構(gòu)的2個工作空間為移動環(huán)位姿向量 [x0y0z0α0β0γ0]T和6根驅(qū)動桿長度向量[l1l2l3l4l5l6]T.兩者關(guān)系為:已知移動環(huán)位姿,求得6根驅(qū)動桿桿長的過程為反解;已知6根驅(qū)動桿桿長,求得移動環(huán)位姿的過程為正解.
2.2 位姿反解
移動環(huán)繞坐標軸Xp、Yp、Zp旋轉(zhuǎn)的角度為α、β、γ,位移為x、y、z,則移動環(huán)與參照環(huán)間的位置關(guān)系為

其中:R為移動環(huán)在坐標系 {P}下的方向余弦矩陣;q為移動環(huán)在坐標系 {P}下的位置矢量[x y z 1]T.

則各驅(qū)動桿長度為

2.3 位姿正解
要想得到畸形矯正時6根驅(qū)動桿的最終桿長,就必須知道移動環(huán)的位姿.此正解過程采用三維優(yōu)化算法進行求解.

進而得出另外形式的6個獨立方程如下:
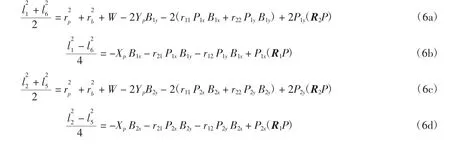

因為式(6) 中3組方程間相互獨立,經(jīng)化簡結(jié)果表明dij均可由XP、YP、ZP來表示,最后得出僅包含三維變量(XPYPZP)的方程.

構(gòu)造目標函數(shù)式(12),給定6根驅(qū)動桿的初始桿長,通過優(yōu)化理論進行求解,最終即可求得移動環(huán)相對參照環(huán)的初始位姿.

3VRML仿真
在畸形矯正中,由于無法看到患者畸形骨段的狀態(tài)信息,因此采用VRML技術(shù)對處方調(diào)整過程中隨機一天的并聯(lián)型骨外固定器支架及畸形骨段進行位姿三維仿真.醫(yī)生既可將矯正前的初始位姿狀態(tài)仿真結(jié)果與實際狀態(tài)做對比,又能根據(jù)對矯正過程的位姿仿真,確定治療方案是否可行.
運用Transform坐標變換節(jié)點創(chuàng)建并聯(lián)型骨外固定器支架和畸形骨段的整體造型時,需將方向余弦矩陣轉(zhuǎn)化為等效旋轉(zhuǎn)軸 [x′y′z′]及旋轉(zhuǎn)角θ的形式.
4 實驗
4.1 仿真實驗
以左上肢畸形為例,給定初始6根驅(qū)動桿的桿長為:197 mm,180 mm,184 mm,169 mm,168 mm,190 mm.定義畸形參數(shù):正位位移,內(nèi)側(cè)12.9 mm;側(cè)位位移,前部15.0 mm;軸向位移,過長11.0 mm;正位角度,外翻10.0°;側(cè)位角度,屈曲10.0°.框架參數(shù):參考環(huán)中心正位偏移,前部5.0 mm;參考環(huán)中心軸向偏移,65.0 mm.
給定療程15 d,經(jīng)計算機程序進行數(shù)據(jù)處理后求得最終驅(qū)動桿桿長為:172 mm,165 mm,177 mm,170 mm,163 mm,167 mm.并生成電子處方如圖3.同時,模擬仿真得到骨外固定器及畸形骨段的位姿圖像.其中,矯正前的位姿如圖4a)所示,按照處方調(diào)整過程中,隨機第7 d的位姿圖像為圖4b),最終療程結(jié)束時,其仿真圖像如圖4c),通過位姿三維仿真,可看出畸形狀態(tài)明顯改善,對治療過程及最終效果有直觀的分析.
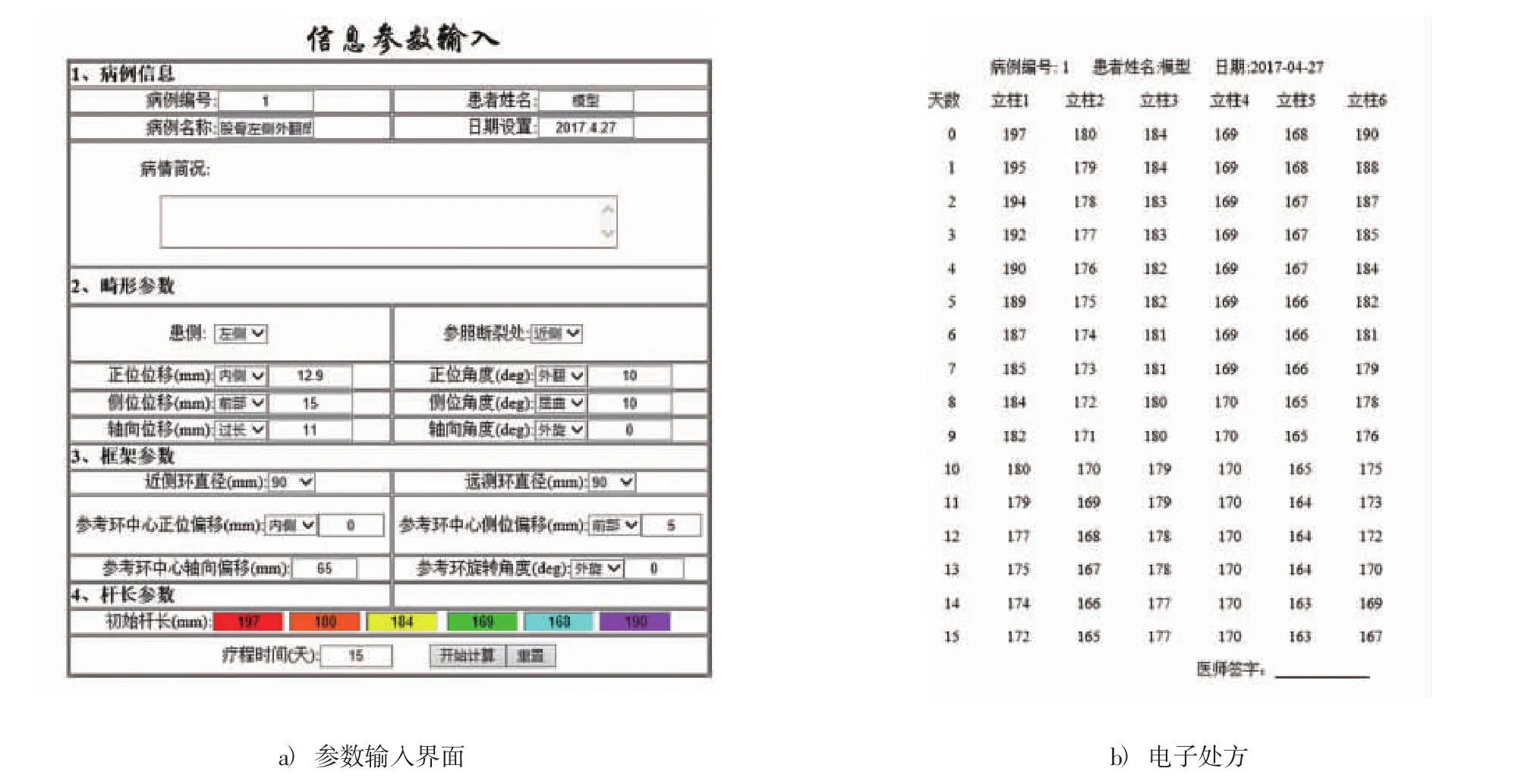
圖3 電子處方模塊Fig.3 Electronic prescription module
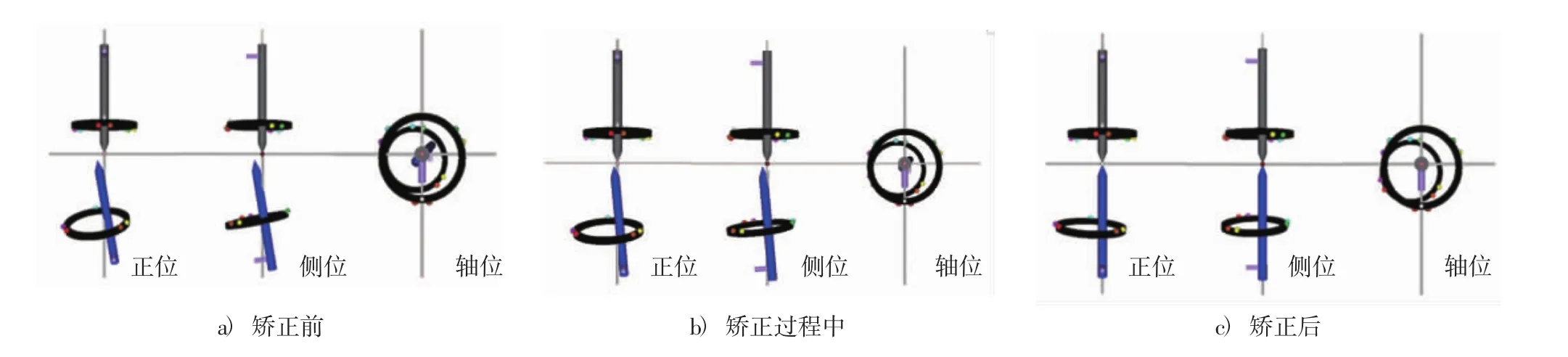
圖4 三維仿真模塊Fig.4 Three-dimensional simulation module
4.2 臨床實驗
女,18歲,左側(cè)肘關(guān)節(jié)攣縮畸形,伸直功能受限,活動度50.0°,影響日常自行進食,其外觀像如圖5a).跨肘安裝并聯(lián)型骨外固定器,近側(cè)全環(huán)以肱骨及肘關(guān)節(jié)縱軸為基準安裝參照環(huán),遠側(cè)前臂安裝移動環(huán).手術(shù)后6根驅(qū)動桿桿長為:145 mm,148 mm,199 mm,208 mm,221 mm,193 mm.根據(jù)圖5b)拍攝的正側(cè)位X線片,以肘關(guān)節(jié)為起始點進行測量,其畸形參數(shù)為:屈曲50.0°;框架參數(shù)為:參考環(huán)中心軸向偏移,87 mm.通過圖6a),將測量的相關(guān)參數(shù)輸入計算機軟件,依據(jù)生成的電子處方,如圖6b),矯正單一屈曲畸形.同時,計算機軟件對調(diào)整過程中隨機一天的外固定器支架及畸形骨段進行三維位姿仿真,如圖7所示.矯正完成時最終6根桿長為:209 mm,216 mm,214 mm,179 mm,193 mm,201 mm.外固定支架拆除后,及時進行肘部主動及被動功能訓(xùn)練,恢復(fù)肘的活動度.最終治療效果滿意,無感染及并發(fā)癥情況發(fā)生,如圖5c).
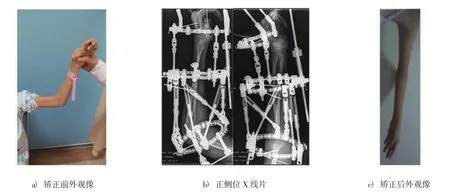
圖5 患者外觀像及X線片F(xiàn)ig.5 Appearance and X-ray of the patient
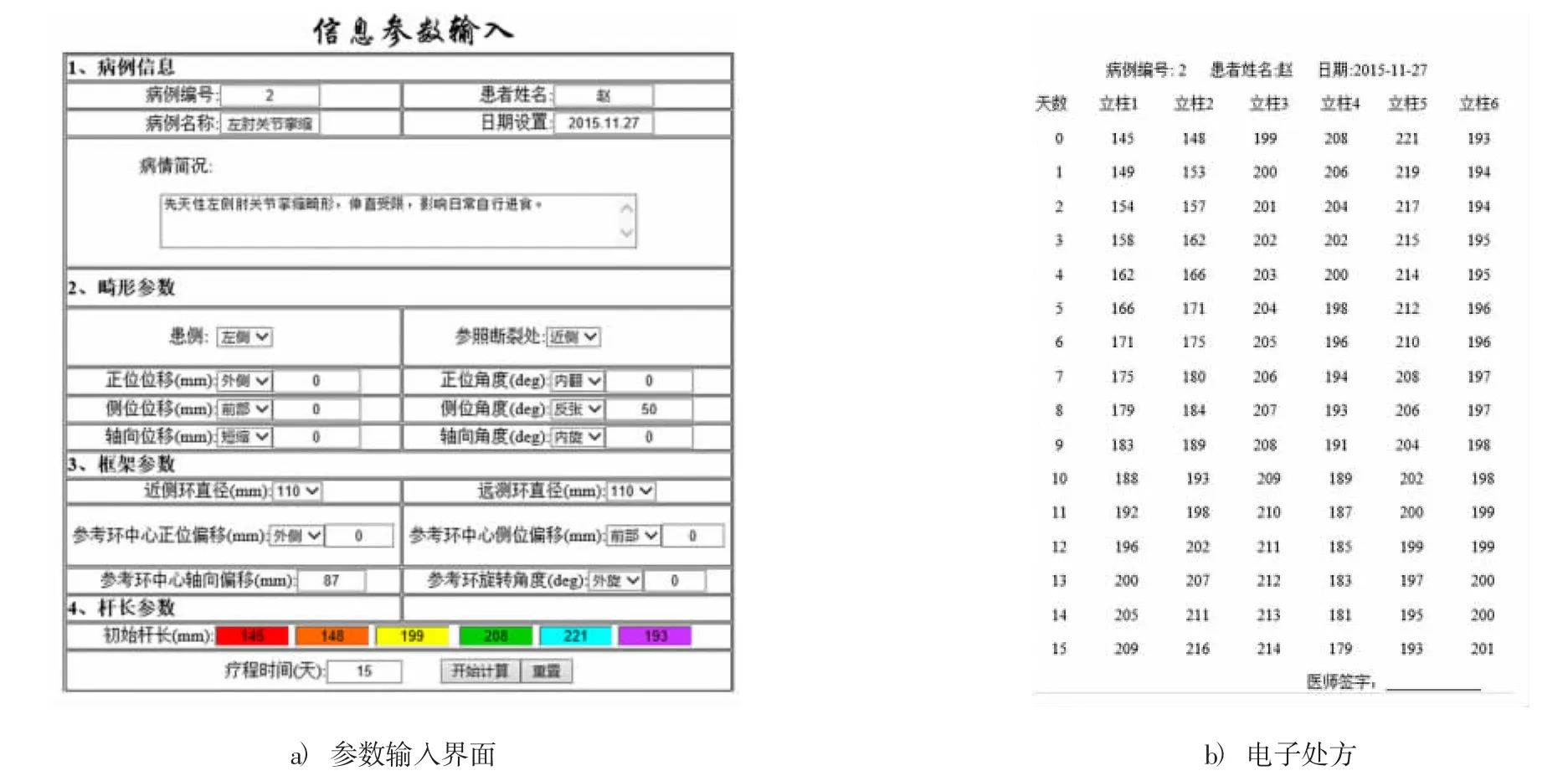
圖6 臨床患者電子處方Fig.6 Electronic prescription of the patient in clinical

圖7 臨床患者位姿三維仿真Fig.7 Three-dimensional simulation of the patient′s correction process
5 結(jié)論
實驗結(jié)果表明,將6-DOF并聯(lián)機器人技術(shù)與骨外固定技術(shù)相結(jié)合,應(yīng)用于畸形矯正領(lǐng)域,獲得了滿意的治療效果.此技術(shù)以醫(yī)學(xué)理論為依據(jù),根據(jù)并聯(lián)機構(gòu)的結(jié)構(gòu)特點,建立并聯(lián)型骨外固定器的數(shù)學(xué)模型及分析工作空間,設(shè)計畸形矯正算法,以數(shù)學(xué)運算為基礎(chǔ),計算機輔助下指導(dǎo)醫(yī)生及患者完成桿長調(diào)整,達到畸形矯正目的,是微創(chuàng)治療下數(shù)字化、精準化及智能化的結(jié)合體.并且在矯正過程中實現(xiàn)對并聯(lián)型骨外固定器及畸形骨段的三維模擬仿真,便于醫(yī)生直觀地分析治療方案的正確性及可行性.
通過設(shè)計雙坐標系,將局部坐標系擬合到全局坐標系,對畸形進行六軸分析,將Ilizarov原理中在單一平面上的調(diào)整擴展為三維空間中的任意運動,可同期矯正多維畸形,縮短了治療時間,減輕患者痛苦.而對于復(fù)雜畸形,又可轉(zhuǎn)化為單一畸形分多次生成處方逐步矯正,避免了二次手術(shù)引起并發(fā)癥的風險.
[1] Tetsworth K,Krome J,Paley D.Lengthening and deformity correction of the upper extremity by the ilizarov technique[J].Orthopedic Clinics of North America,1991,22(4):689-713.
[2] Barker K L,Lamb S E,Simpson A H.Functional recovery in patients with nonunion treated with the ilizarov technique[J].Bone&Joint Journal,2004,86(1):81-85.
[3] Park Y E,Song S H,Kwon H N,et al.Gradual correction of idiopathic genu varum deformity using the ilizarov technique[J].Knee Surgery Sports Traumatology Arthroscopy,2012,21(7):1523-1529.
[4] Stewart D.A Platform with six degrees of freedom[J].Archive Proceedings of the Institution of Mechanical Engineers 1847-1982 (vols 1-196),1965,180(1965):371-386.
[5]Wang J,Gao F,Wang L P.Mechanism design of a simplified 6-DOF 6-RUS parallel manipulator[J].Robotica,2002,20(1):81-91.
[6]Gosselin C.Determination of the workspace of 6-DOF parallel manipulators[J].Conf Proc,1990,c111010(3):331-336.
[7] Jin Y,Chen I M,Yang G.Kinematic design of a 6-DOF parallel manipulator with decoupled translation and rotation[J].IEEE Transactions on Robotics,2006,22(3):545-551.
[8] Manner H M,Huebl M,Radler C,et al.Accuracy of complex lower-limb deformity correction with external fixation:a comparison of the taylor spatial frame with the Ilizarov ring fixator[J].Journal of Childrens Orthopaedics,2007,1(1):55.
[9] 王田苗,李偉,劉達,等.機器人技術(shù)在中醫(yī)正骨手術(shù)中的應(yīng)用研究[J].機器人,2003,25(3):255-258.
[10]Taylor JC.Six-axis deformity analysis and correction[C]//Paley D,Herzenberg JE,editors.Principles of deformity correction.Berlin:Springer-Verlag,2002:411-436.
[11]Seide K,F(xiàn)aschingbauer M,Wenzl M E,et al.A Hexapod robot external fixator for computer assisted fracture reduction and deformity correction[J].The International Journal of Medical Robotics and Computer Assisted Surgery Mrcas,2004,1(1):64.
The application of parallel external fixation in the upper limbs deformity correction
WEI Mengting1,ZHANG Xishuai1,SUN Hao1,2
(1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China;2.Engineering Research Center of Intelligent Rehabilitation,Ministry of Education,Hebei University of Technology,Tianjin 300130,China)
Conventional serialexternal fixation can't correct multidimensional deformitysimultaneously.Therefore,the 6-DOF parallel robot combined with external fixation technology to correct the complex upper limb deformity.It can correct four-dimensional deformities simultaneously.However,there are problems that the elongations of the six struts can't be calculated subjectively and the state of the deformed fragmen can't be observated.So,a computer software with independent intellectual property rights has been developed.Doctor use postoperative radiographs to measure the relevant parameters,then the measurement parameters are inputted into softwareto perform mathematical operations with computer-assisted.It will get the daily adjustment elongations of six struts with the time schedule,that is,electronic prescription.Gradual correction will be achieved through the lengthening or shortening of the struts.A three-dimensional pose simulation of the correction process is made,so that doctors can intuitively analyze the deformed state.Clinical results show that the use of parallel external fixator in correction of upper limb deformity can achieve satisfied outcomes.It improves the doctor's working efficiency and the adjustment accuracy of deformity correction.Besides,the correction process can be simplified,precise and digitized.
parallel manipulator;6-DOF;virtual reality technology;external fixation;deformity correction
TP 242.6;TP 391.4
A
1007-2373(2017) 05-0094-07
D OI:10.14081/j.cnki.hgdxb.2017.05.016
2017-07-08
國家科技支撐計劃(2012BAI33B06);2017河北省研究生創(chuàng)新資助項目(220056)
魏夢婷(1992-),女,碩士研究生,201532502021@stu.hebut.edu.cn.通訊作者:孫昊(1979-),男,副教授,sunhao@hebut.edu.cn.
[責任編輯 楊 屹]