基于無人機DEM的灌區渠系提取方法
2017-11-15 09:29:15張宏鳴韓文霆寧紀鋒王美麗
農業機械學報 2017年10期
張宏鳴 李 瑤 王 猛 韓文霆 寧紀鋒 王美麗
(1.西北農林科技大學信息工程學院,陜西楊凌 712100; 2.西北農林科技大學機械與電子工程學院,陜西楊凌 712100)
基于無人機DEM的灌區渠系提取方法
張宏鳴1李 瑤1王 猛1韓文霆2寧紀鋒1王美麗1
(1.西北農林科技大學信息工程學院,陜西楊凌 712100; 2.西北農林科技大學機械與電子工程學院,陜西楊凌 712100)
大范圍灌區渠系的制圖對于現代節水灌溉技術以及合理配水、安全輸水具有重要意義。但目前所獲得的灌區遙感影像分辨率不高,渠系提取較難。本文以無人機航空攝影測量獲得的數字高程模型(DEM)為基礎,根據渠系特征,使用灌區坡度數據,采用改進的霍夫變換方法,實現了對灌區渠系網絡的提取。與面向對象、監督分類方法和手繪結果進行對比,該方法提取的渠系連續、提取完整度可達85.61%。誤差主要集中在無襯渠系中土壤沉積較多(坡度變化不明顯)的位置以及相交渠系處理時保留渠堤位置而造成。該方法根據灌區地形特征,基于高精度高程數據進行渠系提取,是數字地形分析結合圖像處理在精細農業中的一次有益探索。
灌溉渠系; 數字高程模型; 無人機遙感; 數字地形分析
引言
隨著農業灌溉中水資源短缺問題的日益加劇,精準灌溉成為研究重點[1]。在灌溉排水過程中,渠系是輸送能力最大、成本最低、綜合功能最突出的工程設施[2],如何準確并快速地提取渠系、完成渠系制圖成為灌區管理的一個難點。而現有的灌區渠系識別研究中,主要以中低分辨率的遙感數據為主,受精度的限制,準確率較低。
通常渠系可分為自然渠系和人工渠系[3]。自然渠系通常由地表徑流匯流形成,該類渠系多通過數字高程模型(Digital elevation model,DEM)的匯流計算獲得[4]。METZ等[5]對LCP(Least cost path)算法[6]進行改進,極大地降低了渠系提取的時間和空間復雜度;CAVALLI等[7]基于等值線[8]以及坡度變化閾值方法完成復雜地形中自然渠系的半自動化提取。SCHWANGHART等[9]改進了Carving algorithm算法,并結合Least cost auxiliary topography(LCAT)方法[10]完成低地勢山區中渠系的提取,然而該方法在算法初期需要人為提供大量準確的渠系位置信息。但灌區干渠、支渠等渠床大部分低于耕地,因此以上匯水方法較難在灌區的人工渠系中應用。
對于人工渠系,按照渠系級別,可分為干、支、斗、農、毛等多級。現有的研究方法主要分為對遙感影像及DEM兩種數據源進行處理。吳健生等[11]、喬哲賢等[12]、張超等[13]、顧振偉等[14]分別采用面向對象、邊緣檢測以及遙感影像和邊緣檢測相結合的方式進行分析。然而遙感影像分辨率不足,無法識別寬度較小的農、毛渠,且在少水或無水的條件下較難獲得渠系信息。邊緣檢測算法對提取物的長度較為敏感,無法提取長度較短的渠系。韓文霆等[15]使用基于面向對象的特征組合分類分層方法對灌區渠系進行提取,但針對結果中出現的斷開以及渠系與道路分布相似所造成的錯誤提取等問題并未給出很好的解決辦法。從地形差異性角度,鑒于DEM數據比影像能更好地表達地形高低起伏的信息[16],因此CAZORZI等[17]基于光學雷達(Light detection and ranging)獲得DEM,使用平滑過的DEM與原始DEM做差,得到相對地形模型信息,同時設置相應的閾值來得到一個小范圍的渠系信息。HUTTUNEN[18]認為CAZORZI的方法會產生多余的地形信息,并且算法的應用區域受限,因此使用稀疏邏輯回歸以及多項式模型的方法完成沼澤地區中渠系的提取,但該方法較為耗時。RAPINEL等[19]使用面向對象方法對渠系進行識別,基于LiDAR高程數據,與eCognition軟件結合,完成渠系的提取。但水域以及植被的存在都會對結果產生較大的影響。
隨著無人機技術的不斷發展,高精度地形數據的獲取成為可能[15]。本文針對以上研究方法中數據精度不高、識別精度不高以及人工干預較多等問題,基于無人機獲取灌區正射影像及DEM,結合灌區渠系特征,生成坡度數據,應用改進的霍夫變化方法,連接斷點并提取線性渠系,同時以手繪渠系為標準,與前人研究中[11,12,15,20]使用的面向對象方法以及監督分類方法進行對比。
1 數據來源與研究區域
1.1 數據來源
本研究使用的數據拍攝于2016年3月,通過無人機拍攝的立體像對,基于AgisoftPhotoscan軟件,獲取該區域DEM[21]。無人機型號為AF1000 UAV(圖1),它是MAVinci固定翼飛機,翼展2.7 m,速度為14 m/s。拍攝時,無人機每飛行一次可獲得約1 000幅航拍圖像,在飛行前使用華策實時動態定位(Real-time kinematic,RTK)接收機測量了5個地面檢查點(Ground check points,GCPs),RTK是一種GPS工具,用于確定當前飛行的位置和海拔高度,精度高達1 cm[22]。RTK使用GPS與參照點相結合來確定位置,每個位置的地形特征都不盡相同,因此GCPs須分布在不同位置來進行誤差評估。數據獲取基于西安80地理坐標系。

圖1 UAV裝備Fig.1 Equipment of UAV
1.2 研究區域特征
研究區域位于內蒙古西部臨河區海豐縣,地處黃土高原北部(圖2a),全境為黃河沖擊平原,地面開闊平坦,隸屬河套灌區,灌區內灌排系統縱橫。為減小試驗區地表覆蓋物的影響,在接近無植被覆蓋的河套灌區凍土期,進行無人機飛行及數據采集,生成分辨率為0.25 m地表高程數據。圖2是研究區域位置、高程。由于拍攝時幾乎沒有地表植被,因此可近似看作DEM。本文從研究區中選擇3塊包含渠系的區域(圖2b),其中測試區1僅有渠系信息,測試區2包含房屋以及渠系信息,測試區3包含房屋、道路及渠系信息。測試區1、2用于算法測試及修正,測試區3用于算法改進后的驗證。3個區域坡度數據分別如圖3所示。
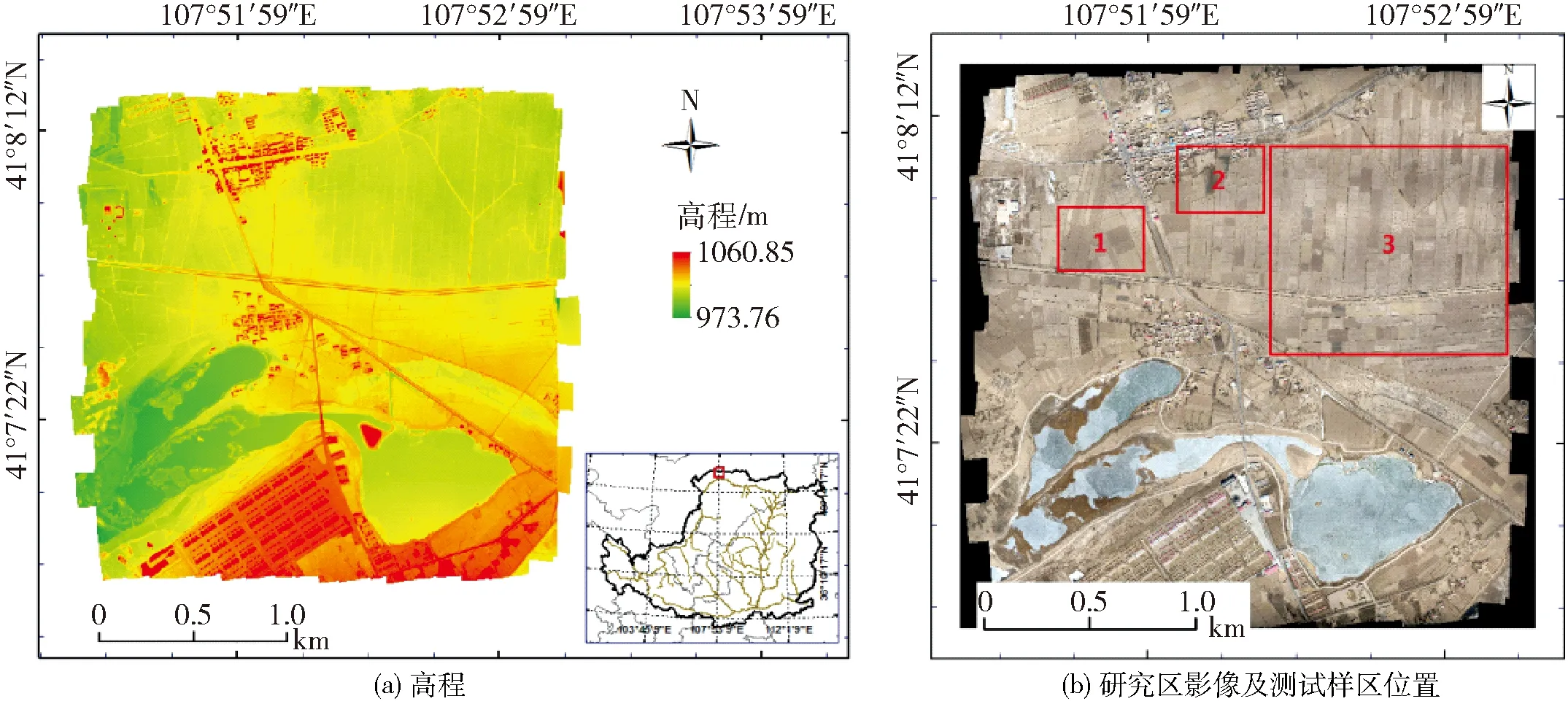
圖2 研究區域高程、影像及測試樣區位置Fig.2 DEM, RGB image and location of test area

圖3 各測試區坡度信息Fig.3 Slope information of test areas
一般在土地整理規劃時不考慮毛渠,同時鑒于數據分辨率的限制,本文未對渠寬小于1 m的毛渠進行提取及驗證。在所選研究區中,根據渠系情況,可分為兩類:有襯渠系(支渠、斗渠)(圖4a),渠系高程變化較明顯;無襯渠系(農毛渠)(圖4b),侵蝕沉積較強烈,不易識別。
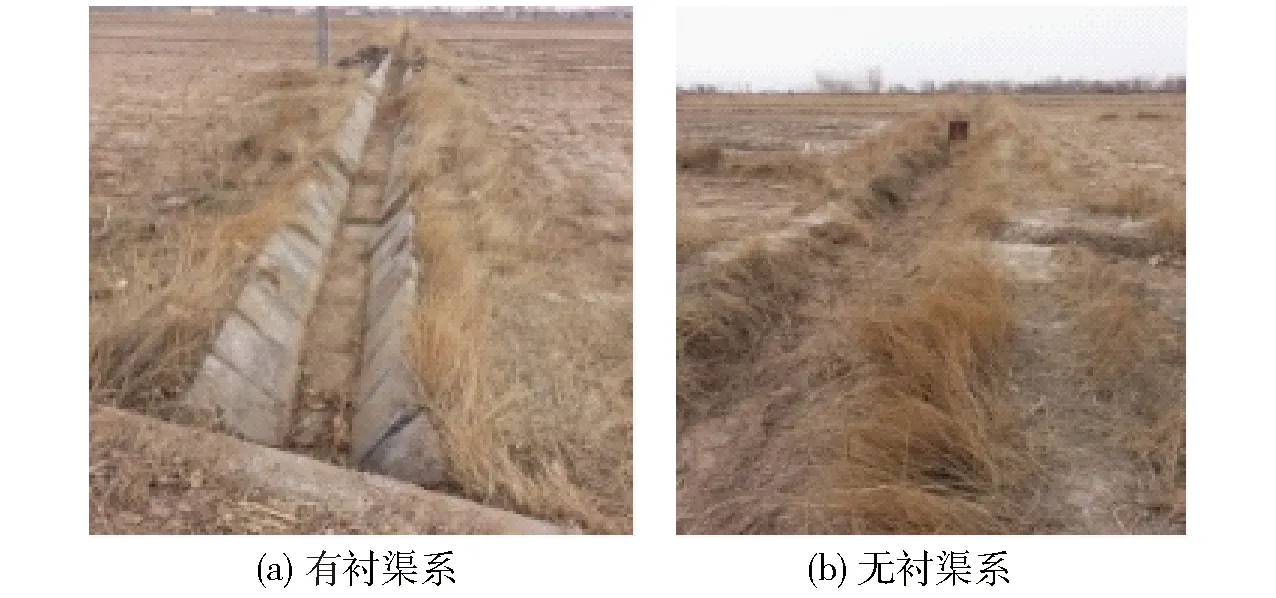
圖4 渠系類型Fig.4 Two types of irrigation networks
渠系高程切面示意圖以及對應的坡度切面示意如圖5所示。在圖5b中道路部分的坡度變化幾乎為零,而渠堤和渠床坡度變化則比較明顯。通過對數據進行分析,無人機影像、高程中渠系與大部分道路的顏色區分度較小,很難直接通過影像或者高程將二者區分開。由于渠堤與渠床的高度差導致渠系坡度[23]具有明顯的4個峰值變化(圖5b),而道路與農地之間的坡度變化較弱。本文嘗試通過坡度轉換,剔除其他線狀物體(如道路、田塊)對渠系提取的影響。本文用于渠系提取的測試數據包括影像、DEM和坡度。
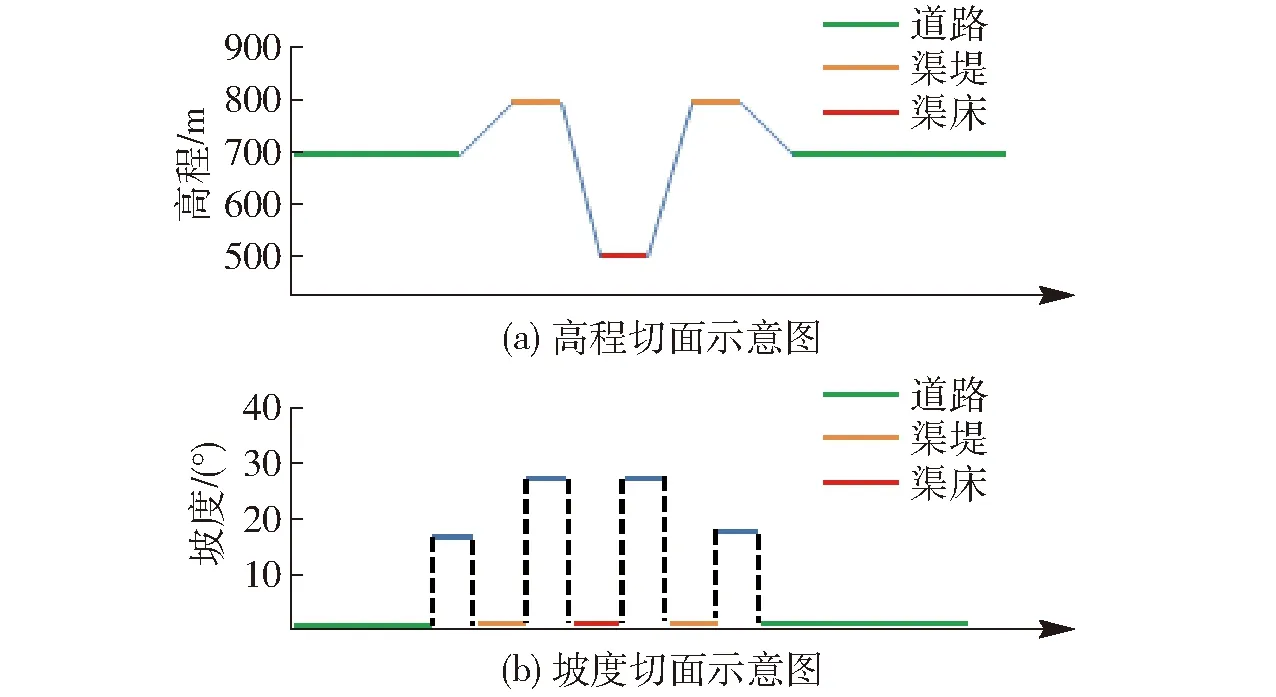
圖5 渠系橫截面示意圖Fig.5 Cross section diagrams of drainage
2 改進霍夫變換的渠系提取方法
2.1 渠系提取算法
本文渠系提取方法的主要流程包括坡度轉換、坡度數據灰度處理、二值化、去噪、膨脹、邊緣檢測和改進的霍夫變換等步驟(圖6)。
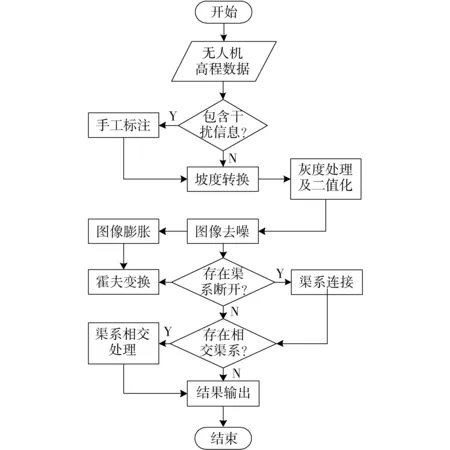
圖6 方法流程圖Fig.6 Flow chart of method
霍夫變換是從圖像中識別出具有相同幾何形狀的基本方法之一[24-25],該識別過程利用了一種圖像空間到參數空間的映射關系[26-27]。
在二維坐標系中,通過點(x,y)的直線表達式為
y=kx+b
(1)
但是該表達式無法表示出斜率不存在即垂直于軸的直線,因此對于這個問題引入了極坐標表達方式,即
ρ=xcosθ+ysinθ
(2)
式(2)中ρ表示直線到原點的距離,θ為線與x軸的夾角。把直線從平面坐標映射到極坐標的關系如圖7所示,霍夫變換即為在參數空間中計算累計結果的局部最大值,從而得到符合條件的集合[25]。
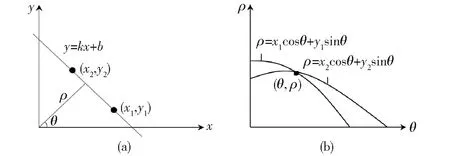
圖7 xy空間到參數空間的映射關系Fig.7 Relation between xy space and parameter space
2.2 算法改進
將基本霍夫變換應用于渠系提取后出現2個問題:原本應連續的渠系出現了斷開(圖8a);將DEM數據進行坡度轉換之后,會出現如圖5b所示的4個坡度峰值變化,因此在提取時會出現多條渠系相交現象(圖8b),而本文只需要使用一條渠系來表示出該位置的渠系信息即可。為此,提出了以下解決方法。
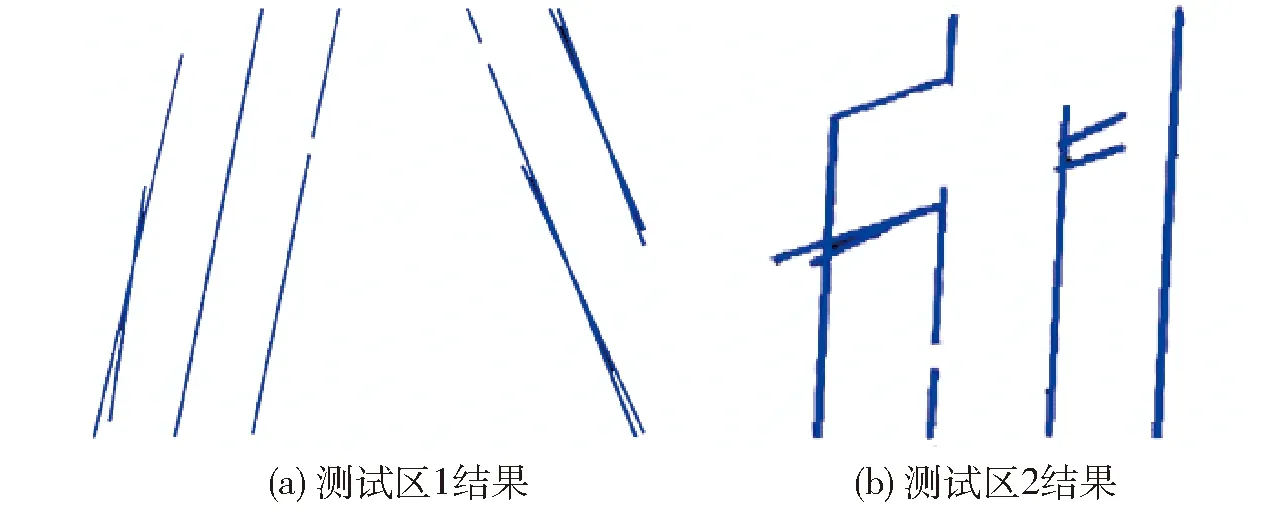
圖8 基本霍夫變換結果Fig.8 Result of Hough transform
渠系斷開是由于渠堤和渠床變化不夠明顯導致,而通常該類渠系具有相同的斜率。因此可通過對霍夫變換的結果進行遍歷,獲取每一條線段的θ屬性,從而判斷兩線段是否斷開,若斷開則對兩條線段的4個點進行尋找,分別記錄橫坐標的較小值以及縱坐標的較大值,從而重新繪制出整條渠系。
渠系相交是由于數據經過邊緣檢測[28-29]、圖像膨脹[30]操作之后表現為多像素連接的帶狀區域以及坡度數據的4個峰值變化。本文采用幾何方法對該問題進行處理。一般渠系的相交分為兩種情況:一條渠系的兩端分別位于另外一條渠系的兩側(圖9a);有一點位于渠系上(圖9b)。在代數幾何中已知直線的2個端點P1(x1,y1)和P2(x2,y2),當斜率存在時,直線的表達式可以用兩點式表示為
(3)
此時y2≠y1且x2≠x1,將式(3)進行轉化得
(y-y1)(x2-x1)-(x-x1)(y2-y1)=0
(4)
其中y2-y1以及x2-x1均固定,若另外一條線段的兩端分別在該線段的兩側,或者其中一點在該線段上,那么式(4)的結果必然一個大于等于零,一個小于等于零,即兩者的乘積小于等于零,如果兩條線段滿足相交情況并且斜率之差的絕對值在某個閾值范圍內,則可認為這兩條線段提取的是同一個區域。分別使用

(5)
計算兩條渠系的長度,且選取較長的一條作為該區域的代表渠系。
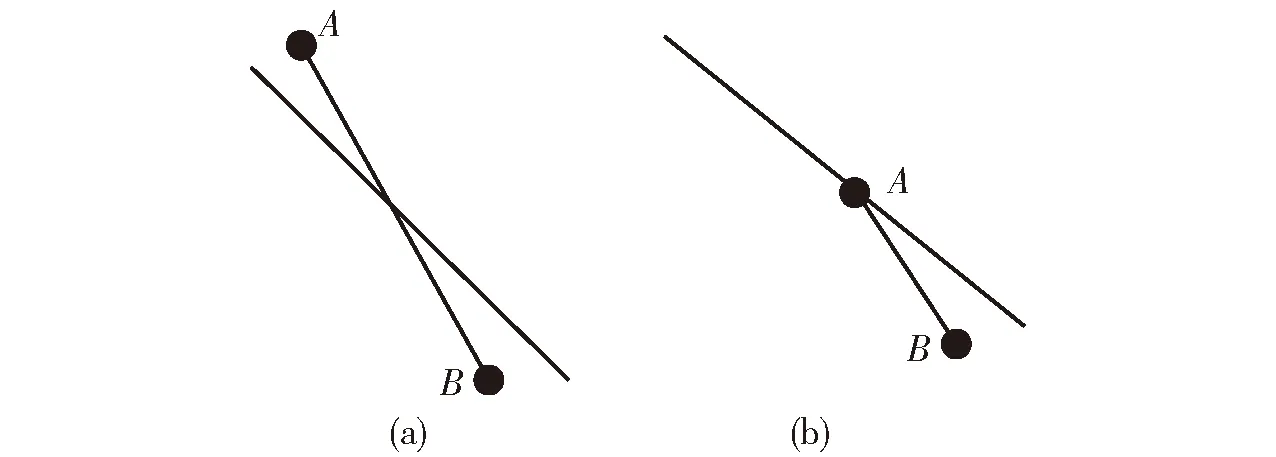
圖9 渠系相交情況分類Fig.9 Two types of crossing irrigation networks
經過斷點連接以及相交渠系處理后,區域1、2的最終結果如圖10所示。顯然,渠系的斷點以及相交問題得到了有效解決。

圖10 改進霍夫變換結果Fig.10 Result of improved Hough transform
2.3 結果對比
為驗證改進霍夫變換方法的渠系提取效果,本文對前人使用的相關方法進行整理和總結,發現大多使用監督分類[20]以及面向對象分類[11,15]方法完成渠系提取或者以這兩種方法作為對比算法。因此本研究以手工繪制渠系為基礎,將不同方法應用于無人機正射影像和坡度數據,分析不同方法識別渠系的完整度以及錯誤率。本文根據道路提取算法的精度分析研究[11,31],將渠系提取的完整度定義為

(6)
錯誤率定義為

(7)
式中r——與手繪渠系相比較正確的像素點數量
e——錯誤識別的像素點數目
A——手繪渠系的像素點數
M——該種算法所識別出來的總像素點數
本文的面向對象分類法以及監督分類方法提取渠系的過程借助于ENVI軟件完成,面向對象分類法的主要步驟為影像分割、特征提取、規則建立及分類、后處理等過程,根據前人經驗以及研究區域特征,建立相應的規則,最后為減少提取結果中出現的干擾點,使用Majority/Minority Analysis消除某些孤立的噪聲,提取結果如圖11a、11b;監督分類方法的主要步驟為樣本選擇、分類器選擇(本文使用最大似然分類法)、影像分類以及分類后處理等步驟,結果如圖11c、11d。將不同方法的提取結果提取保存為文本數據,同時以手繪渠系為基礎,采用逐像素遍歷方式統計對應像素數目。在實際中,由于毛渠渠堤的寬度一般大于0.5 m,因此在結果對比中,距手繪位置處0.5 m以內的皆認為在誤差許可范圍內。統計后的結果如表1所示。
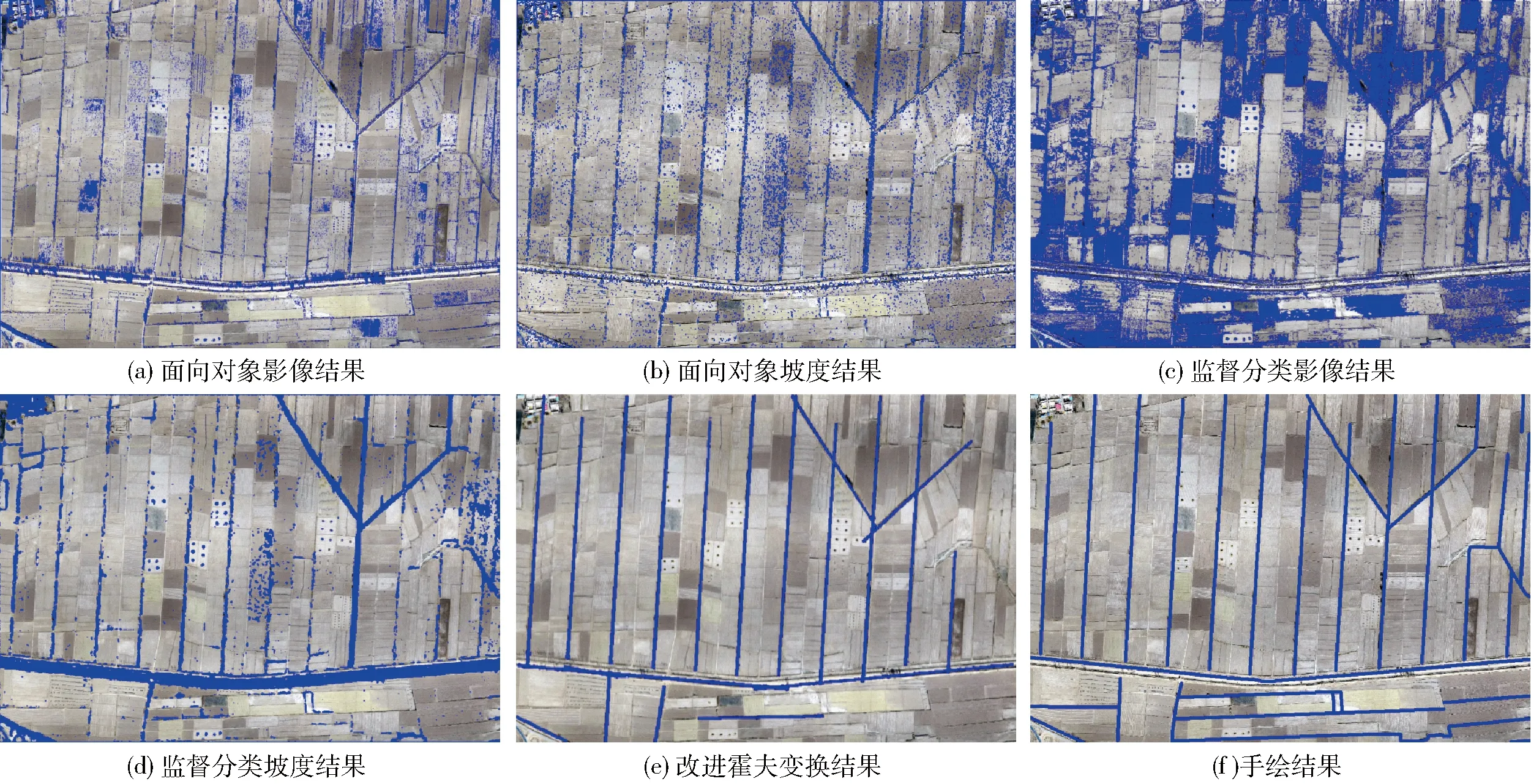
圖11 不同算法的結果比較Fig.11 Comparisons of results of different algorithms

表1 算法結果對比Tab.1 Comparison of three different algorithms
3 結果與討論
不同方法的提取效果如圖11所示,對應各個方法提取的完整度以及錯誤率計算結果如表1,結果表明:
(1)使用面向對象方法對影像數據處理的渠系提取完整度為58.70%,優于完整度為53.26%的坡度數據,然而由于地面堆肥、翻耕等異常點的影響(圖11a,11b),使得兩種方法的錯誤提取率達到66%以上。通常基于面向對象方法提取渠系多為渠系有水條件下的光譜影像,通過光譜特征與其他地表物體的差異性來進行區分,在渠系少水甚至無水條件下,識別率很低。本文的影像數據只包含RGB 3個波段,即渠系的光譜信息與其他物體的區分度較小,因此該方法的結果不夠理想,具有很大的局限性。
(2)監督分類方法對坡度數據處理的完整度為85.24%,優于影像數據,然而錯誤率卻高達76.44%。影像數據受地表顏色干擾較大,部分秸稈焚燒后的地表顏色使得該方法對影像數據提取易受到相似顏色的地物影響,錯誤率很大。該方法需要提前選擇具有代表性的樣本參數,并以此為基礎進行特征分類,因此訓練區域越典型其識別效果越好,而坡度數據中因包含有豐富的色彩信息,所以在進行樣本區域選擇時,坡度數據的樣本選擇比影像數據具有較好的代表性,受到其他地物干擾較少,因此錯誤率較低。
(3)基于改進霍夫變換方法的識別精度最高,完整度達85.61%,錯誤率為18.92%。由于本文方法考慮了渠系的線性特征,同時根據地形,以坡度數據為計算基礎,因此在準確率上優于其他兩種方法。誤差主要是由于部分無襯渠系泥沙沉積過多,導致坡度變化特征不夠明顯,因此不易識別;交叉渠系在剔除時,由于保留的位置多為渠堤位置,會存在誤差。但提取結果能夠將大部分干擾因素剔除,獲得較純粹的渠系信息,因此在渠系提取中該方法具有可推廣性及適用性。
綜上所述,面向對象方法對于無人機正射影像數據準確率低于監督分類方法,但兩種方法易受到其他噪聲影響,錯誤提取率過高,因此正射影像不適合提取渠系。對于DEM數據,提取坡度后采用3種方法的處理結果表明,改進霍夫變換方法優于面向對象方法以及監督分類方法,因此適宜進行渠系提取。
4 結論
(1)無人機航空攝影測量方法獲取的高程數據可用于渠系提取,但原始數據較難區分道路以及不帶襯的渠系信息,進行坡度轉換后能夠過濾掉部分田間道路和干擾信息。
(2)使用面向對象方法分別對影像數據和坡度數據進行處理,從提取完整度而言,影像數據的優于坡度數據,主要原因為面向對象方法的原理是根據不同光譜區間來識別不同對象,而坡度數據中光譜特征單一,因此提取效果較差。對監督分類方法而言,影像數據和坡度數據的差別不大,然而坡度數據的錯誤率遠低于影像數據。主要原因為影像數據中渠系與周圍非渠系地物差別很小,從而誤將很多其他非渠系信息識別為渠系。從人工干預程度而言,面向對象方法在處理過程中需要根據渠系的分布特征,添加屬性從而進行對象篩選,監督分類方法需提前規劃出訓練樣本,并以選取的樣本為基礎進行特征提取。
(3)改進霍夫變換能夠在渠系提取過程中很好地解決渠系斷開以及相交問題,且僅含有渠系信息,渠系提取的完整度可達85.61%,優于面向對象和監督分類方法。同時在提取過程中無過多的人為干預,自動化程度較高,未成功提取的誤差主要集中在渠系坡度變化不明顯的位置以及在處理相交渠系時,最終保留的渠系多為渠堤位置而造成的誤差。從準確度以及人工干預角度講,本文的改進霍夫變換方法均優于面向對象以及監督分類方法,是灌區渠系提取方法的一次有效探索。
2 SANG G, CAO S, GUO R, et al.Optimization of cost per day of cascade pumping station water-delivery system[J].Journal of Drainage & Irrigation Machinery Engineering,2013, 31(8): 688-695.
3 王小軍,張強,易小兵,等.灌區渠系特征與灌溉水利用系數的Horton分維[J].地理研究, 2014, 33(4): 789-800.
WANG Xiaojun, ZHANG Qiang,YI Xiaobing, et al.Study on the Horton fractal dimension with the irrigation canal system characteristics and effective utilization coefficient of irrigation water[J].Geographical Research, 2014, 33(4): 789-800.(in Chinese)
4 ZHANG H, YAO Z, YANG Q, et al.An integrated algorithm to evaluate flow direction and flow accumulation in flat regions of hydrologically corrected DEMs[J].Catena, 2017, 151: 174-181.
5 METZ M, MITASOVA H, HARMON R S.Efficient extraction of drainage networks from massive, radar-based elevation models with least cost path search[J].Hydrology and Earth System Sciences,2011, 15(2): 667-678.
6 EHLSCHLAEGER C R.Using the AT search algorithm to develop hydrologic models from digital elevation data[C]∥Proceedings of the International Geographic Information System (IGIS) Symposium, Baltimore, MD, 1989.
7 CAVALLI M, TREVISANI S, GOLDIN B, et al.Semi-automatic derivation of channel network from a high- resolution DTM: the example of an Italian alpine region[J].European Journal of Remote Sensing, 2013, 46(1):152-174.
8 TARBOTON D G.Advances in the mapping of flow networks from digital elevation data[J].American Society of Civil Engineers, 2014, 23(4): 107-111.
9 SCHWANGHART W, GROOM G, KUHN N J, et al.Flow network derivation from a high resolution DEM in a low relief, agrarian landscape[J].Earth Surface Processes and Landforms, 2013, 38(13):1576-1586.
10 SOILLE P, VOGT J, COLOMBO R.Carving and adaptive drainage enforcement of grid digital elevation models[J].Water Resources Research, 2003, 39(12): 1366-1379.
11 吳健生,劉建政,黃秀蘭,等.基于面向對象分類的土地整理區農田灌排系統自動化識別[J].農業工程學報, 2012, 28(8): 25-31.
WU Jiansheng,LIU Jianzheng,HUANG Xiulan,et al.Automatic identification of irrigation and drainage system in land reclamation area based on object-oriented classification[J].Transactions of the CSAE, 2012, 28(8): 25-31.(in Chinese)
12 喬賢哲,張超,楊建宇,等.高分辨率遙感影像中農田灌溉設施的提取[J].測繪通報,2012(增刊1): 372-374.
QIAO Xianzhe,ZHANG Chao,YANG Jianyu, et al.Extraction of farmland irrigation facilities in high resolution remote sensing images[J].Bulletin of Surveying and Mapping, 2012(Supp.1): 372-374.(in Chinese)
13 張超,王志浩,楊建宇,等.基于Canny算子的農田線狀工程地物自動提取方法[J/OL].農業機械學報, 2015, 46(2): 270-275.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150239&flag=1.DOI:10.6041/j.issn.1000-1298.2015.02.039.
ZHANG Chao, WANG Zhihao,YANG Jianyu,et al.Farmland linear project feature auto-extraction method based on Canny algorithm[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015, 46(2): 270-275.(in Chinese)
14 顧振偉,張超,楊建宇,等.基于高分辨率遙感影像的灌排溝渠提取方法[J].農業工程,2014, 4(3): 64-67.
GU Zhenwei,ZHANG Chao,YANG Jianyu,et al.Method of extracting irrigation and drainage ditches based on high remote sensing image[J].Agricultural Engineering, 2014, 4(3): 64-67.(in Chinese)
15 韓文霆,張立元,張海鑫,等.基于無人機遙感與面向對象法的田間渠系分布信息提取[J/OL].農業機械學報, 2017, 48(3): 205-214.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170326&flag=1.DOI:10.6041/j.issn.1000-1298.2017.03.026.
HAN Wenting,ZHANG Liyuan,ZHANG Haixin,et al.Extraction method of sublateral canal distribution information based on UAV remote sensing[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 205-214.(in Chinese)
16 劉凱,湯國安,黃驍力,等.面向地形特征的DEM與影像紋理差異分析[J].地球信息科學學報, 2016, 18(3): 386-395.
LIU Kai,TANG Guoan,HUANG Xiaoli,et al.Research on the difference between textures derived from DEM and remote-sensing image for topographic analysis[J].Journal of Geo-Information Science, 2016, 18(3): 386-395.(in Chinese)
17 CAZORZI F, FONTANA G D, LUCA A D, et al.Drainage network detection and assessment of network storage capacity in agrarian landscape[J].Hydrological Processes,2013, 27(4): 541-553.
18 HUTTUNEN H.Sparse logistic regression and polynomial modelling for detection of artificial drainage networks[J].Remote Sensing Letters, 2015, 6(4):311-320.
19 RAPINEL S, HUBERT-MOY L, CLéMENT B, et al.Ditch network extraction and hydrogeomorphological characterization using LiDAR-derived DTM in wetlands[J].Hydrology Research, 2014, 46(2):276-290.
20 許迪,李益農,蔡林根,等.衛星遙感影像在農田灌排系統識別中的應用研究[J].農業工程學報, 2004, 20(2): 36-39.
XU Di,LI Yinong,CAI Lin’gen,et al.Applied study of satellite image in identification of irrigation and drainage system[J].Transaction of the CSAE, 2004, 20(2): 36-39.(in Chinese)
21 BARRETTE J, AUGUST P, GOLET F.Accuracy assessment of wetland boundary delineation using aerial photography and digital orthophotography[J].Photogrammetric Engineering & Remote Sensing,2000, 66(4): 409-416.
22 GAN-MOR S, CLARK R L, UPCHURCH B L.Implement lateral position accuracy under RTK-GPS tractor guidance[J].Computers & Electronics in Agriculture,2007, 59(1-2): 31-38.
23 張宏鳴,宋澤魯,楊江濤,等.DEM超分辨率重構對梯田坡度提取的影響研究[J/OL].農業機械學報, 2017, 48(1):112-118.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170115&flag=1.DOI:10.6041/j.issn.1000-1298.2017.01.015.
ZHANG Hongming,SONG Zelu,YANG Jiangtao,et al.Influence of DEM super-resolution reconstruction on terraced field slope extraction[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 112-118.(in Chinese)
24 黃琦,張國基,唐向京,等.基于霍夫變換的圖像運動模糊角度識別法的改進[J].計算機應用, 2008, 28(1): 211-213.
HUANG Qi,ZHANG Guoji,TANG Xiangjing,et al.Improvement of motion blurred direction identification based on Hough transform[J].Journal of Computer Applications, 2008, 28(1): 211-213.(in Chinese)
25 DUAN R, WEI Z, HUANG S, et al.Fast line detection algorithm based on improved Hough transformation[J].Chinese Journal of Scientific Instrument, 2010, 31(12): 2774-2780.
26 陳小艷,王強,李柏林.改進的Hough變換檢測圓方法[J].計算機系統應用, 2015, 24(8): 197-201.
CHEN Xiaoyan,WANG Qiang,LI Bolin.Improved Hough algorithm for circle detection[J].Computer Systems & Applications,2015, 24(8): 197-201.(in Chinese)
27 RIVEIRO B, GONZLEZ-JORGE H, MARTNEZ-SNCHEZ J, et al.Automatic detection of zebra crossings from mobile LiDAR data[J].Optics & Laser Technology, 2015, 70: 63-70.
28 楊秋菊,肖雪梅.基于改進Canny特征點的SIFT算法[J].計算機工程與設計, 2011, 32(7): 2428-2431.
YANG Qiuju,XIAO Xuemei.Improved SIFT algorithm based on Canny feature points[J].Computer Engineering and Design, 2011, 32(7): 2428-2431.(in Chinese)
29 鈕圣虓,王盛,楊晶晶,等.完全基于邊緣信息的快速圖像分割算法[J].計算機輔助設計與圖形學學報, 2012, 24(11): 1410-1419.
NIU Shengxiao, WANG Sheng, YANG Jingjing, et al.A fast image segmentation algorithm fully based on edge information[J].Journal of Computer-Aided Design & Computer Graphics, 2012, 24(11): 1410-1419.(in Chinese)
30 鄧仕超,黃寅.二值圖像膨脹腐蝕的快速算法[J].計算機工程與應用,2017, 53(5):207-211.
DENG Shichao,HUANG Yin.Fast algorithm of dilation and erosion for binary image[J].Computer Engineering and Applications, 2017, 53(5):207-211.(in Chinese)
31 曾靜靜,盧秀山,王健,等.基于LIDAR回波信息的道路提取[J].測繪科學,2011, 36(2): 142-143.
ZENG Jingjing, LU Xiushan, WANG Jian, et al.Research of spatial structure and differentiation pattern of housing price in Xi’an based on ESDA and geostatistical analysis[J].Science of Surveying and Mapping, 2011, 36(2): 142-143.(in Chinese)
ExtractionMethodofIrrigationNetworksinIrrigatedAreaBasedonUAVDEM
ZHANG Hongming1LI Yao1WANG Meng1HAN Wenting2NING Jifeng1WANG Meili1
(1.CollegeofInformationEngineering,NorthwestA&FUniversity,Yangling,Shaanxi712100,China2.CollegeofMechanicalandElectronicEngineering,NorthwestA&FUniversity,Yangling,Shaanxi712100,China)
Mapping of irrigation networks in large-scale irrigation districts is very important for the development of modern water-saving irrigation technology, at the same time, it is also important for allocating water reasonably and supplying water safely.However, due to the low resolution of the remote sensing images currently, it is very difficult to extract the irrigation networks in detail.Based on the slope data generated from digital elevation model (DEM) which was obtained from the unmanned aerial vehicle (UAV) aerial photogrammetry collected in March, 2016, and combined the characteristics of irrigation networks, a revised hough transform (RHT) method was adopted, which realized the fast extraction of irrigation networks.Compared with the object-oriented method, supervised-classification method and the field measurement results, the integrity of RHT method can reach about 85.61%.Errors were mainly concentrated in the non liner cannal part, which existed more sediment deposition (slope was not obvious), and also in the cannal dike when unneceassary parallel or crossed cannal were eliminated.According to the characteristics of irrigation networks, the research result was a beneficial exploration for the study of artificial irrigation network system, which was based on the high-resolution DEMs.
irrigation network system; digital elevation model; unmanned aerial vehicle remote sensing; digital terrain analysis
10.6041/j.issn.1000-1298.2017.10.020
S157; TP79
A
1000-1298(2017)10-0165-07
2017-04-23
2017-07-20
國家重點研發計劃項目(2017YFC0403203)、國家自然科學基金項目(41771315、41301283、41371274、61402374、41301507)、歐盟地平線2020研究與創新計劃項目(GA:635750)、黃土高原土壤侵蝕與旱地農業國家重點實驗室開放課題項目(A314021402-1702)、陜西省自然科學基礎研究計劃項目(2016JM6038)和西北農林科技大學基本科研業務費專項資金項目(2452015060)
張宏鳴(1979—),男,副教授,博士,主要從事空間大數據管理與區域土壤侵蝕評價研究,E-mail: zhm@nwsuaf.edu.cn
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
少兒科學周刊·少年版(2015年3期)2015-07-07 21:00:00