考慮避障的航天器編隊(duì)軌道容錯(cuò)控制律設(shè)計(jì)
2017-11-17 09:05:55馬廣富董宏洋胡慶雷
航空學(xué)報(bào) 2017年10期
馬廣富,董宏洋,*,胡慶雷
1.哈爾濱工業(yè)大學(xué) 航天學(xué)院,哈爾濱 150001 2.北京航空航天大學(xué) 自動(dòng)化科學(xué)與電氣工程學(xué)院,北京 100083
考慮避障的航天器編隊(duì)軌道容錯(cuò)控制律設(shè)計(jì)
馬廣富1,董宏洋1,*,胡慶雷2
1.哈爾濱工業(yè)大學(xué) 航天學(xué)院,哈爾濱 150001 2.北京航空航天大學(xué) 自動(dòng)化科學(xué)與電氣工程學(xué)院,北京 100083
為解決航天器編隊(duì)飛行過(guò)程中的故障容錯(cuò)、障礙規(guī)避以及碰撞避免等重要的飛行安全問(wèn)題,提出了一種新穎的自適應(yīng)軌道控制方法。該方法將人工勢(shì)函數(shù)制導(dǎo)與滑模控制技術(shù)相結(jié)合,利用一類特殊的人工勢(shì)函數(shù)來(lái)描述障礙規(guī)避及碰撞避免等要求,并基于此為航天器編隊(duì)設(shè)計(jì)了協(xié)同控制器,使得編隊(duì)在實(shí)現(xiàn)目標(biāo)追蹤和構(gòu)型保持的同時(shí),能夠避免相互碰撞并具備規(guī)避障礙物的能力。更為重要的是,控制器中自適應(yīng)律的引入使得閉環(huán)系統(tǒng)對(duì)執(zhí)行機(jī)構(gòu)故障、外界干擾及參數(shù)不確定性具備良好的容錯(cuò)能力,顯著增強(qiáng)了閉環(huán)系統(tǒng)的魯棒性。 最后,典型的仿真分析驗(yàn)證了所提控制方法的有效性。
航天器編隊(duì)控制;容錯(cuò)控制;人工勢(shì)函數(shù)制導(dǎo);障礙規(guī)避;碰撞避免
相比于傳統(tǒng)的集成大航天器系統(tǒng),多航天器編隊(duì)系統(tǒng)由于具有更高的精度,增強(qiáng)的魯棒性以及多任務(wù)能力等優(yōu)點(diǎn)而在近些年受到了廣泛的研究與關(guān)注[1-2]。目標(biāo)跟蹤與構(gòu)型保持是航天器編隊(duì)飛行時(shí)的基本任務(wù)需求,針對(duì)這類任務(wù),文獻(xiàn)[3]為航天器編隊(duì)建立了領(lǐng)航者-跟隨者虛擬結(jié)構(gòu),并為其提出了一類跟蹤控制律;文獻(xiàn)[4]針對(duì)運(yùn)行在近地軌道中的微小航天器編隊(duì),提出了一種協(xié)同控制方法;文獻(xiàn)[5]則研究了重力探測(cè)任務(wù)中,遠(yuǎn)距離航天器編隊(duì)系統(tǒng)的控制問(wèn)題。
航天器編隊(duì)的飛行安全問(wèn)題是軌道控制需要考慮的首要問(wèn)題,也是完成一切其他任務(wù)的基礎(chǔ)。由于太空環(huán)境復(fù)雜,在執(zhí)行跟蹤及構(gòu)型保持等任務(wù)時(shí),軌道控制律一方面必須保證編隊(duì)成員間不會(huì)發(fā)生意外碰撞,另一方面還需要給予編隊(duì)內(nèi)衛(wèi)星躲避外來(lái)障礙物的能力。文獻(xiàn)[6-9]均考慮了這兩方面的問(wèn)題,而后分別基于非奇異終端滑模[6],勢(shì)函數(shù)制導(dǎo)[7-8]以及模糊控制[9]等方法為相關(guān)問(wèn)題提供了多種解決途徑。另外,由于航天器的復(fù)雜結(jié)構(gòu)及惡劣的工作環(huán)境,執(zhí)行機(jī)構(gòu)的故障時(shí)有發(fā)生,如這些故障不能得到及時(shí)的處理,則可能造成任務(wù)失敗以及巨大的經(jīng)濟(jì)損失。故航天器也必須對(duì)執(zhí)行機(jī)構(gòu)故障具備一定的容錯(cuò)能力[10-11]。對(duì)于容錯(cuò)控制,Jin等[12]應(yīng)用時(shí)間滯后法設(shè)計(jì)了一種被動(dòng)容錯(cuò)控制器,以實(shí)現(xiàn)在4個(gè)飛輪故障情況下的姿態(tài)跟蹤控制;Cai等[13]利用自適應(yīng)和滑模方法,為航天器姿態(tài)控制解決了包括完全失效、卡死故障等主流故障在內(nèi)的容錯(cuò)控制問(wèn)題;文獻(xiàn)[14]進(jìn)一步擴(kuò)展了這一結(jié)果,提出了一種有限時(shí)間容錯(cuò)控制方法;文獻(xiàn)[15]基于對(duì)偶四元數(shù),提出了一種六自由度容錯(cuò)控制方法。
然而,少有文獻(xiàn)或其他研究成果同時(shí)考慮包括碰撞避免,障礙規(guī)避以及執(zhí)行機(jī)構(gòu)故障容錯(cuò)在內(nèi)的綜合性飛行安全問(wèn)題。并且,當(dāng)這類飛行安全要求與原有的目標(biāo)跟蹤及構(gòu)型保持等編隊(duì)飛行任務(wù)相結(jié)合時(shí),控制器設(shè)計(jì)難度將被進(jìn)一步加大。本文將勢(shì)函數(shù)制導(dǎo)、滑模控制與自適應(yīng)控制相結(jié)合,為這個(gè)復(fù)雜問(wèn)題提出了一種解決方法。具體來(lái)說(shuō),本文首先設(shè)計(jì)了一種特殊的人工勢(shì)函數(shù)以描述包括目標(biāo)跟蹤、構(gòu)型保持、碰撞避免與障礙規(guī)避在內(nèi)的任務(wù)需求,而后基于滑模控制方法,設(shè)計(jì)了一種協(xié)同控制律以使勢(shì)函數(shù)持續(xù)減小直到達(dá)到其極小值,從而使編隊(duì)避免了各類碰撞,并可維持預(yù)定構(gòu)型且跟蹤動(dòng)態(tài)目標(biāo)。而且,通過(guò)引入自適應(yīng)控制律,所設(shè)計(jì)的控制器可對(duì)包括漂移、部分失效、完全失效以及卡死在內(nèi)的潛在執(zhí)行機(jī)構(gòu)故障進(jìn)行容錯(cuò)控制,并同時(shí)解決了參數(shù)不確定性及外界干擾問(wèn)題。最后,仿真分析證明了所提出方法的有效性及閉環(huán)系統(tǒng)的魯棒性。
1 軌道相對(duì)動(dòng)力學(xué)模型
本文將采用軌道坐標(biāo)系[16]下的航天器編隊(duì)相對(duì)動(dòng)力學(xué)模型進(jìn)行控制器設(shè)計(jì)。
以Fr={Xr,Yr,Zr}表示參考軌道坐標(biāo)系,并以Ft={Xt,Yt,Zt}、Fo={Xo,Yo,Zo}和Fi={Xi,Yi,Zi}分別表示領(lǐng)航者、障礙物和第i個(gè)跟隨者的本體坐標(biāo)系,各坐標(biāo)系的定義如圖1所示。
假設(shè)編隊(duì)中的所有航天器均為剛體,以ρi表示第i個(gè)跟隨衛(wèi)星相對(duì)于Fr的位置矢量,則第i個(gè)跟隨衛(wèi)星的相對(duì)軌道動(dòng)力學(xué)可被描述為[17]
mini(ri,rc)+fi+di
(1)
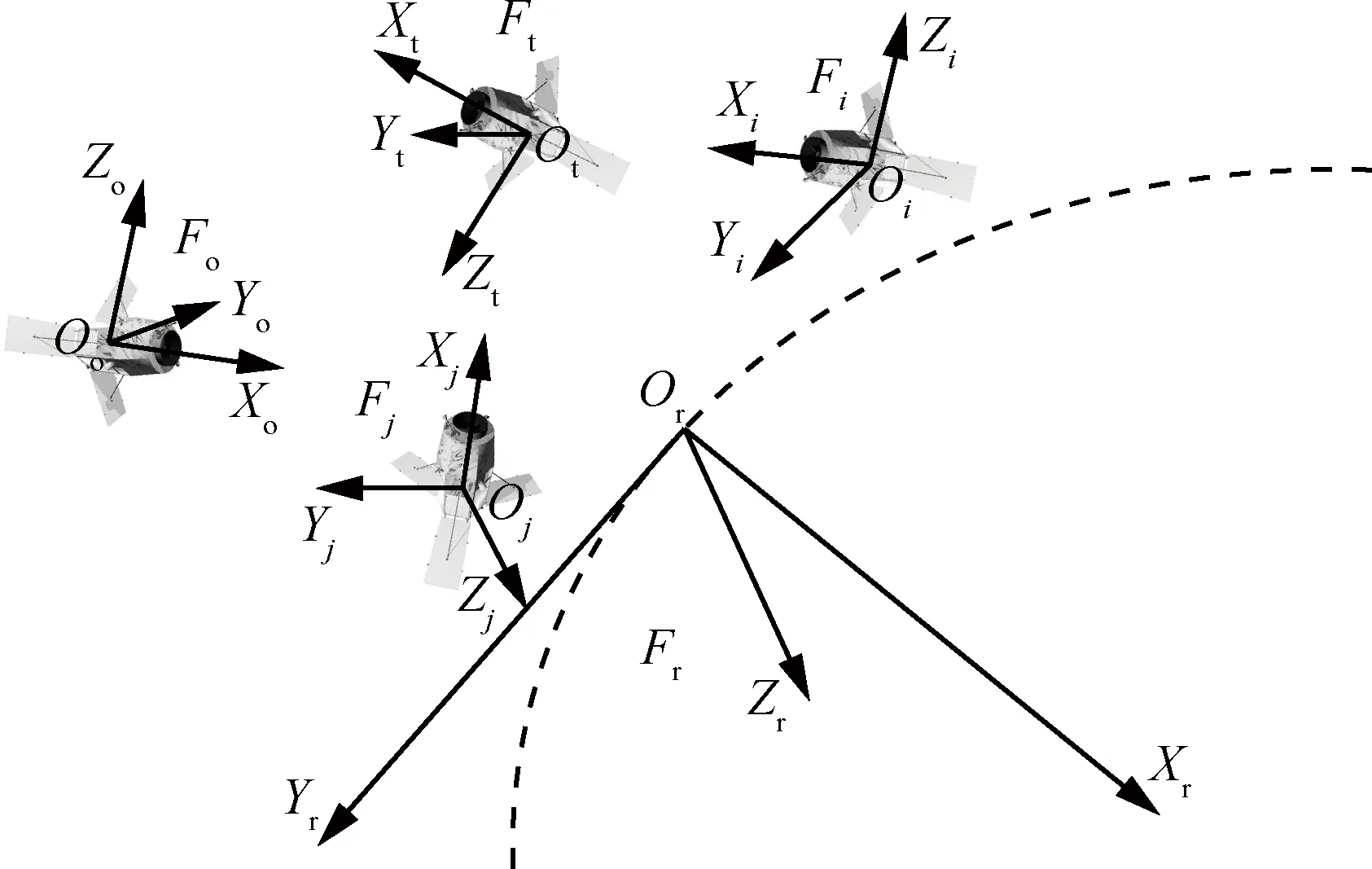
圖1 坐標(biāo)系示例Fig.1 Illustration of reference frames
式中:mi為跟隨者i的質(zhì)量;fi為控制輸入;
ni(ri,rc)


式中:R為地球半徑;J2=1.082×10-3;φ為衛(wèi)星的地心緯度;P2(φ)=(3cos2φ-1)/2。
在實(shí)際工程中,由于工作環(huán)境惡劣和部件老損等原因,航天器的執(zhí)行機(jī)構(gòu)可能發(fā)生故障,常見(jiàn)的執(zhí)行機(jī)構(gòu)故障形式包括[18]:部分失效,完全失效、卡死故障和輸出漂移。為了描述這些可能故障,將式(1)改寫(xiě)為

(2)

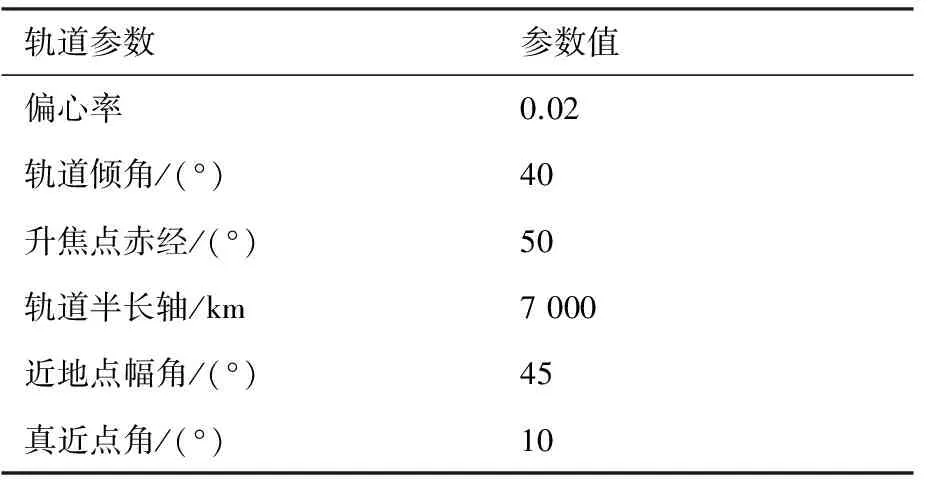
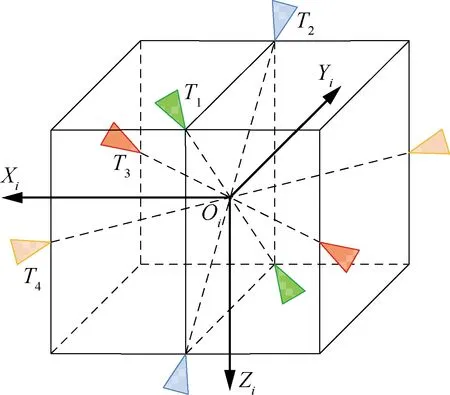
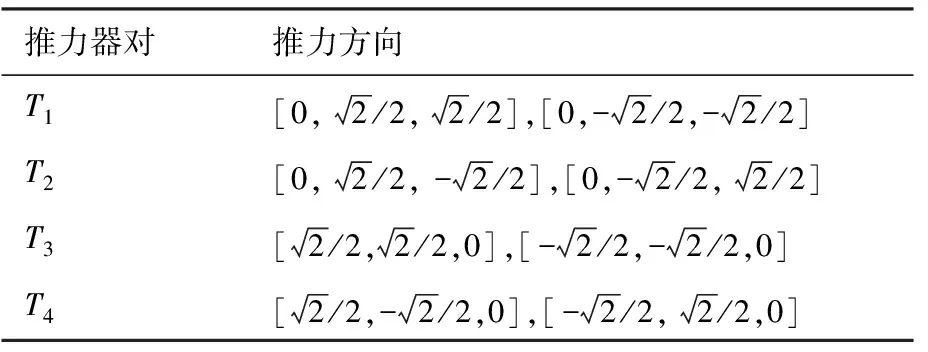
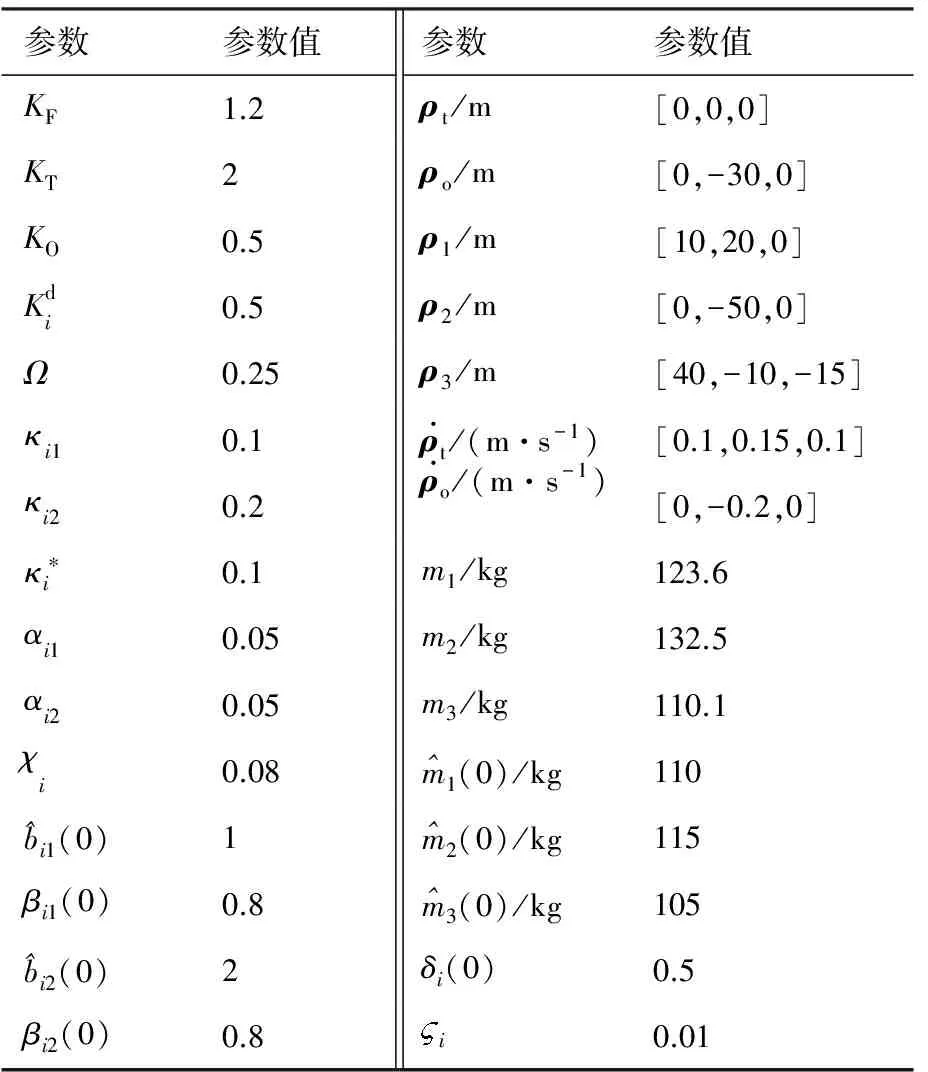
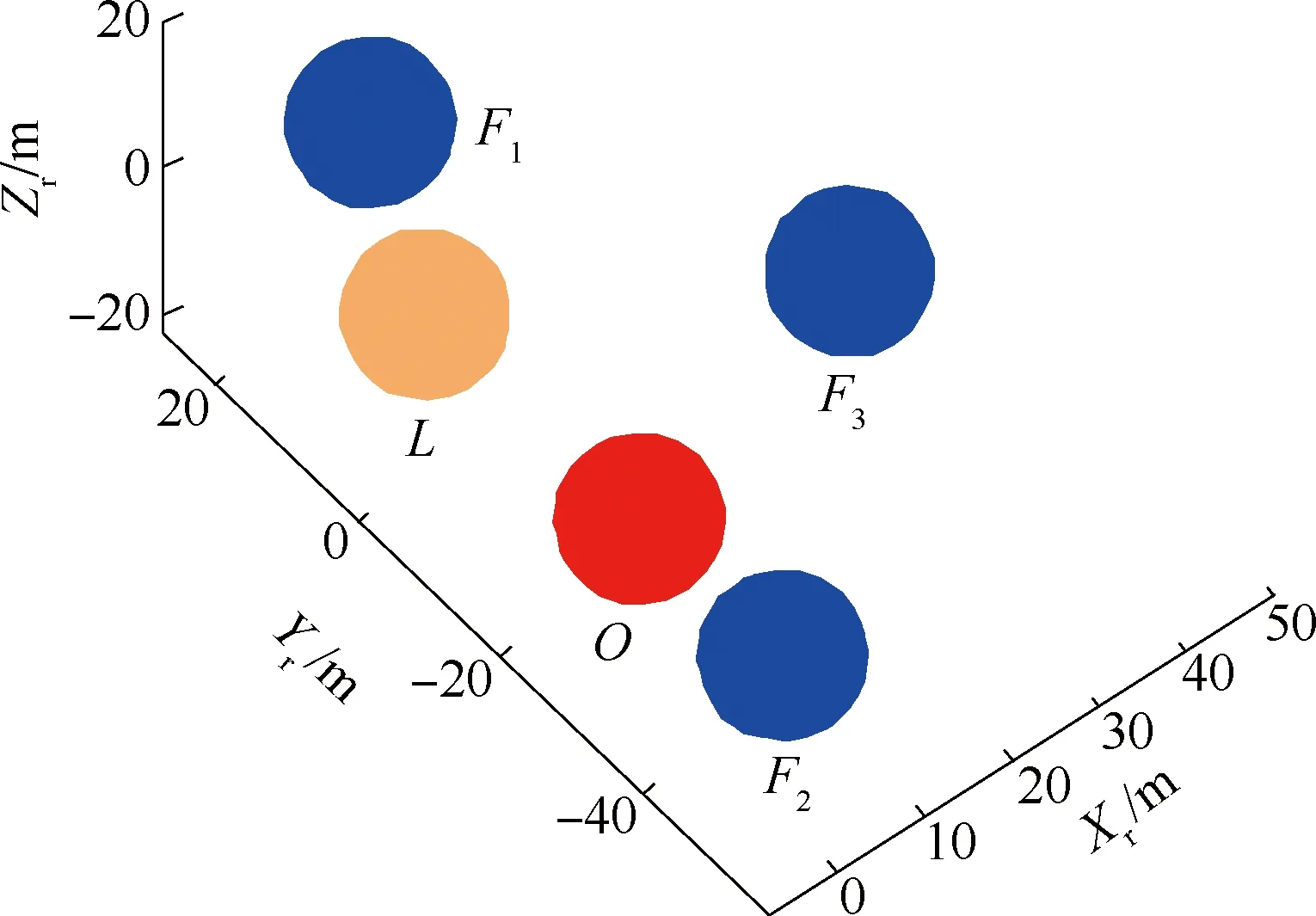
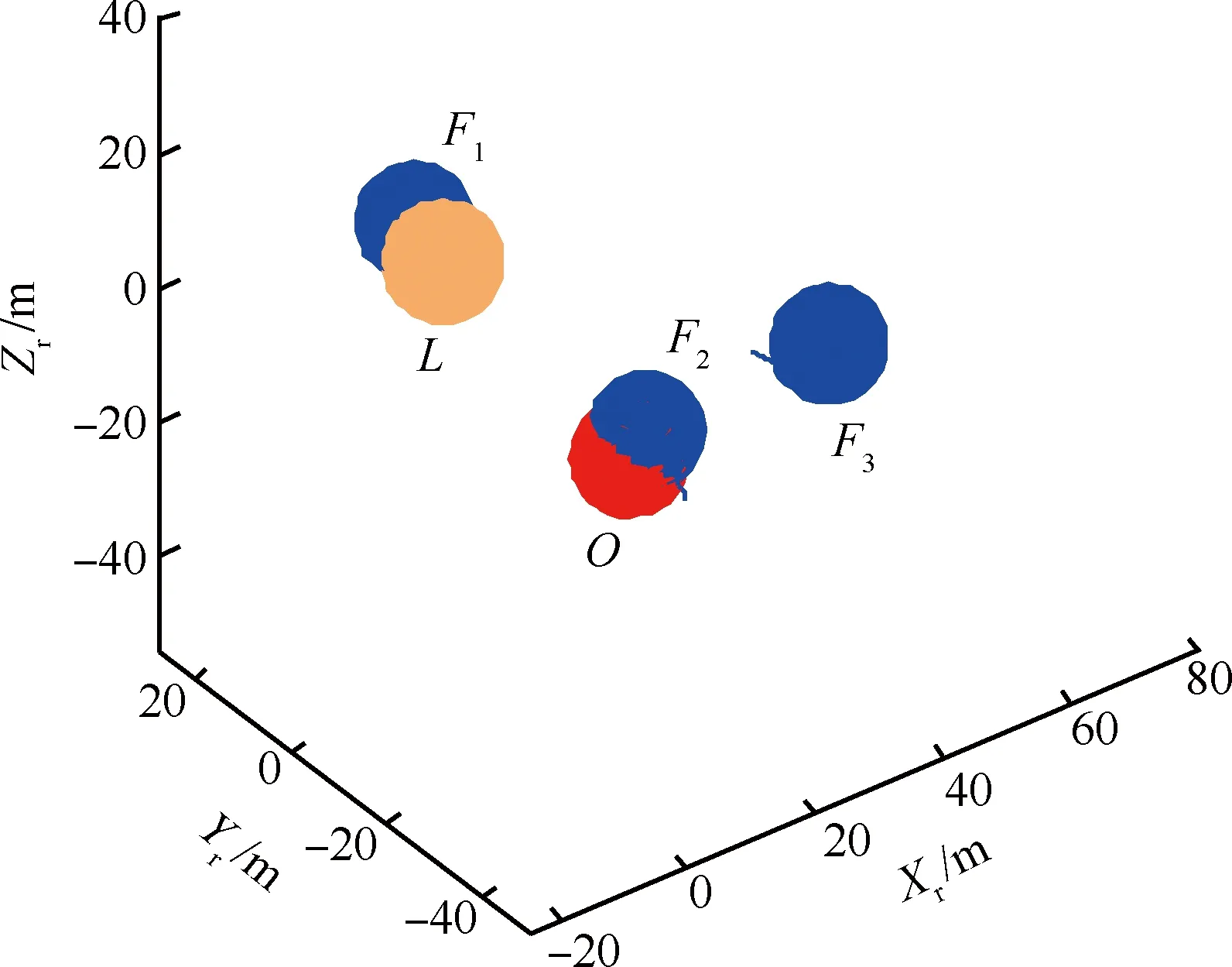
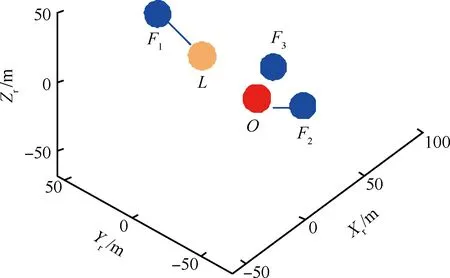
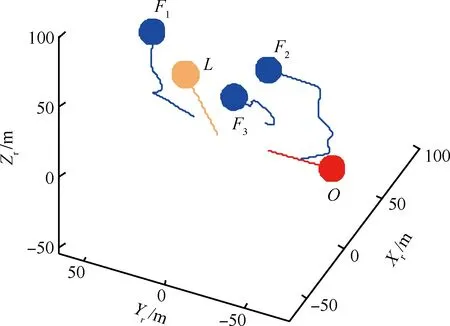
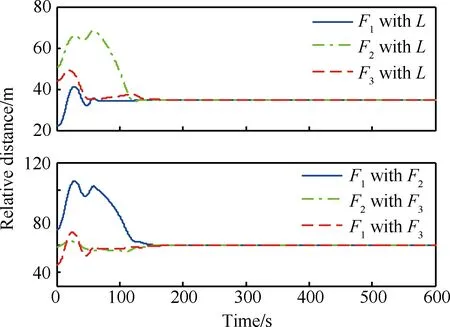
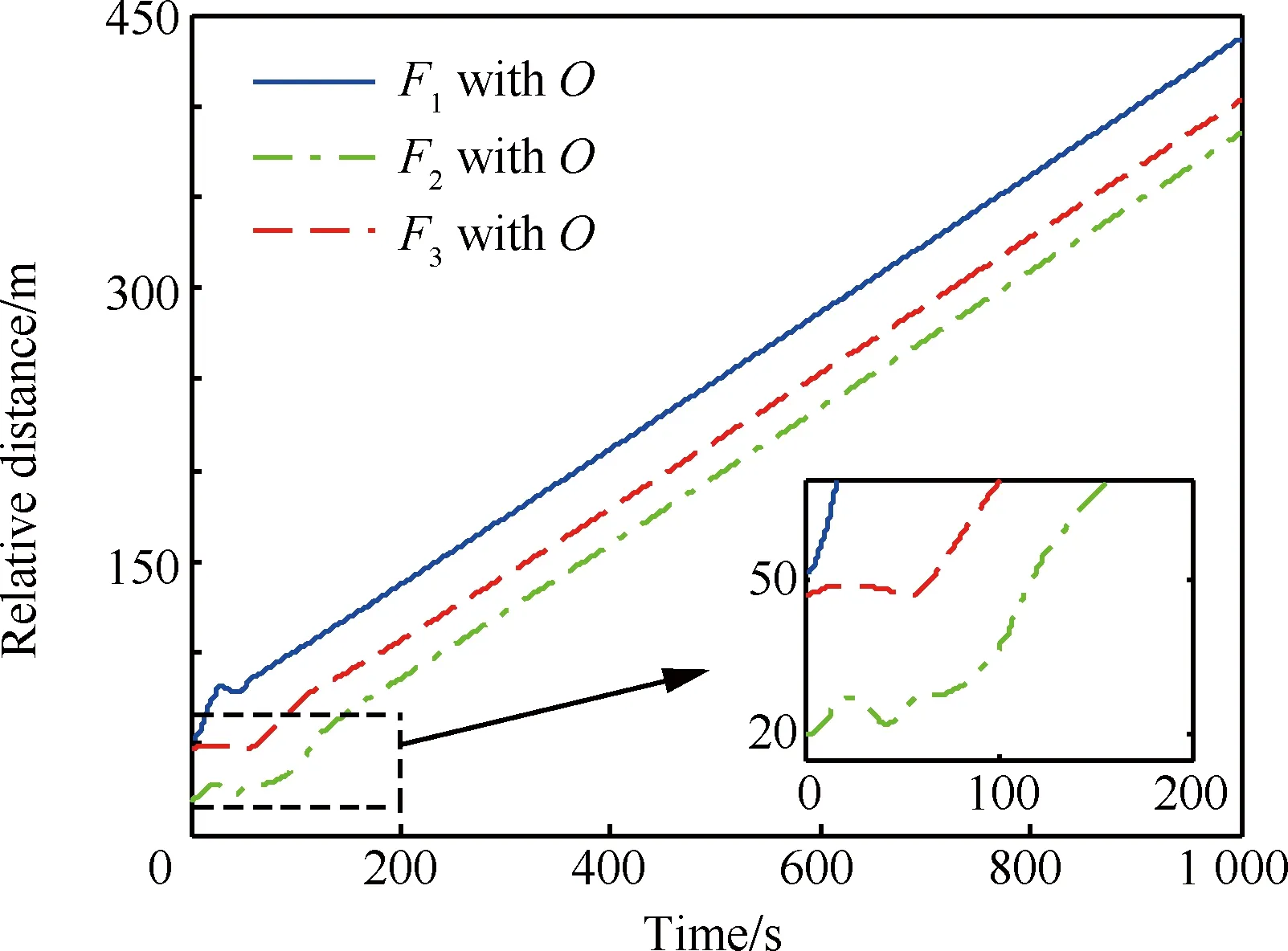
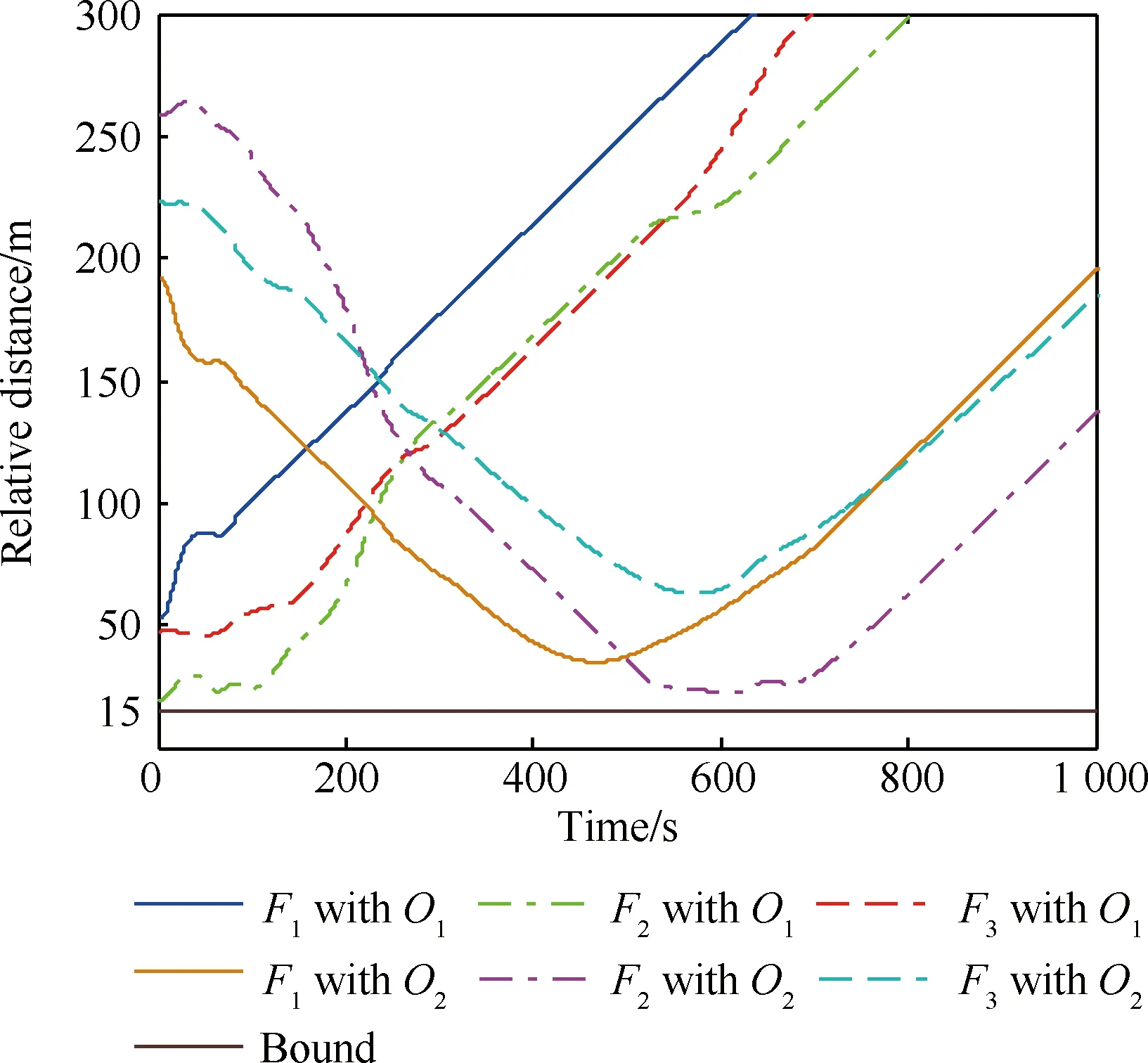
2) 部分失效:0 3) 完全失效:eik=0。 第2節(jié)將基于式(2)所描述的相對(duì)動(dòng)力學(xué)模型進(jìn)行勢(shì)函數(shù)及容錯(cuò)控制器設(shè)計(jì)。 本節(jié)采用人工勢(shì)函數(shù)制導(dǎo)方法來(lái)描述包括目標(biāo)跟蹤、構(gòu)型保持、碰撞避免以及障礙物規(guī)避在內(nèi)的復(fù)合控制目標(biāo)。人工勢(shì)函數(shù)方法起源于物理學(xué)中勢(shì)能的概念,被廣泛應(yīng)用于對(duì)各類非線性運(yùn)動(dòng)系統(tǒng)進(jìn)行控制律或制導(dǎo)律設(shè)計(jì)[19-20]。假設(shè)在航天器編隊(duì)飛行的過(guò)程中,將受到一個(gè)障礙物的沖擊。以ρt及ρo分別表示主航天器與障礙物相對(duì)于Fr的位置矢量,設(shè)計(jì)如式(3)所示的勢(shì)函數(shù)。 (3) 式中:JF、JT和JO分別被稱做勢(shì)函數(shù)的構(gòu)型保持部分、目標(biāo)跟蹤部分和障礙規(guī)避部分;Jij、Jit和Jio表示各部分勢(shì)函數(shù)的分量,它們的下標(biāo)為所對(duì)應(yīng)的航天器;KF、KT和KO為各部分的正權(quán)重常數(shù)。各部分勢(shì)函數(shù)需要滿足如下一些性質(zhì)[8,21]: 由這些性質(zhì)可知,對(duì)于任意的i,j=1,2,…,n,且i≠j,dij、dit及dio可被用于描述對(duì)應(yīng)航天器間的最小允許距離;當(dāng)‖ρi-ρj‖=δij,‖ρi-ρt‖=δit和‖ρi-ρo‖≥δio時(shí),勢(shì)函數(shù)達(dá)到最小值,故δij和δit為對(duì)應(yīng)航天器間的期望相對(duì)距離;而δio為障礙物的最大影響距離,其定義為:當(dāng)衛(wèi)星i與障礙物之間的距離大于δio時(shí),可認(rèn)為其逃離了障礙物的影響范圍,此時(shí)Jio有最小值。另需說(shuō)明的是,所有滿足上述條件的勢(shì)函數(shù)均可用于隨后的控制器設(shè)計(jì)與分析,一個(gè)具體的勢(shì)函數(shù)實(shí)例將在仿真分析中給出。 3) ?t≥0,‖ρi(t)-ρj(t)‖>dij,‖ρi(t)-ρt(t)‖>ditand ‖ρi(t)-ρo(t)‖>dio 對(duì)于控制器而言,雖然無(wú)法確切的獲知執(zhí)行機(jī)構(gòu)的輸出漂移值和外界干擾值,但它們顯然應(yīng)是有界的,即 (4) 式中:bi1∈R+為一未知正常數(shù),i=1,2,…,n。 另外一個(gè)合理的假設(shè)是,障礙物只在有限時(shí)間內(nèi)影響編隊(duì),而后障礙物將遠(yuǎn)離編隊(duì)。這個(gè)假設(shè)可被描述為 (5) 而后,設(shè)計(jì)如式(6)所示的時(shí)變滑模面。 (6) 式中: (7) (8) (9) 基于前文的假設(shè)與分析,本文的主要貢獻(xiàn)可總結(jié)為如下定理: 定理1考慮由式(2)描述的航天器編隊(duì)系統(tǒng)、式(3)中的人造勢(shì)函數(shù),以及如下控制律及自適應(yīng)律: (10) (11) (12) (13) 證明:考慮如下的李雅普諾夫候選函數(shù): (14) 將式(2)代入V的時(shí)間導(dǎo)數(shù),可得 (15) 將控制及自適應(yīng)律式(10)、式(11)和式(12)代入式(15),并進(jìn)行相對(duì)直接的代數(shù)運(yùn)算,可得 (16) 而后,考慮勢(shì)函數(shù)J隨時(shí)間的導(dǎo)數(shù) (17) 根據(jù)前文提出的勢(shì)函數(shù)性質(zhì),其對(duì)ρi、ρt、ρo的偏導(dǎo)為 KT(ρi-ρt)hit(‖ρi-ρt‖)+ KO(ρi-ρo)pio(‖ρi-ρo‖) (18) (19) (20) 將式(19)與式(20)代入式(18)并求和可得 (21) 由Jij的對(duì)稱性可知 (22) 從而 (23) (24) (25) (26) 對(duì)式(26)兩邊求和,再考慮到式(22)給出的性質(zhì),仍可得到 (27) (28) 結(jié)合式(16),可得 (29) 定義: 則式(29)等價(jià)于 (30) 根據(jù)舒爾補(bǔ)條件[22]可知 (31) ?t≥0:‖ρi-ρj‖>dij;‖ρi-ρt‖>dit;‖ρi-ρo‖>dio (32) 最后由式(23)及式(17)可知: 定理1得證,勢(shì)函數(shù)將最終收斂到極小值點(diǎn),且在此過(guò)程中不會(huì)有任何碰撞發(fā)生。 為驗(yàn)證控制器的有效性與魯棒性,本節(jié)將對(duì)閉環(huán)系統(tǒng)進(jìn)行仿真分析。在仿真中,參考軌道的參數(shù)如表1所示。 考慮一個(gè)具有3顆跟隨星和1顆領(lǐng)航星的航天器編隊(duì),編隊(duì)在飛行過(guò)程中會(huì)受到一個(gè)外來(lái)障礙物的沖擊。而后,根據(jù)前文所提的性質(zhì),為系統(tǒng)設(shè)計(jì)如下的勢(shì)函數(shù): 表1 參考軌道參數(shù)Table 1 Parameters of reference orbit (33) 注意到雖然κio為分段函數(shù),但J仍是連續(xù)的且具有連續(xù)的導(dǎo)數(shù)。容易驗(yàn)證式(33)中的勢(shì)函數(shù)滿足第2節(jié)所提出的全部性質(zhì)。 航天器的執(zhí)行機(jī)構(gòu)為推力器,每個(gè)追蹤星都具有4對(duì)推力器(T1~T4),配置圖如圖2所示,每個(gè)推力器最大可提供5 N的推力,各對(duì)推力器的推力方向在表2中給出。 從而可得到控制分配矩陣為 (34) 圖2 推力器配置圖Fig.2 Thruster configuration 表2 推力器輸出方向Table 2 Output directions of thrusters 航天器所受到的外界干擾力設(shè)為 (35) 表3 仿真參數(shù)Table 3 Simulation parameters 4.1 執(zhí)行機(jī)構(gòu)工況正常時(shí)的仿真分析 本節(jié)將給出當(dāng)所有執(zhí)行機(jī)構(gòu)均可正常工作時(shí)的仿真結(jié)果。根據(jù)前文假設(shè),在3D仿真結(jié)果圖中,將所有航天器以直徑為15 m的、不同顏色的球體表示,則當(dāng)任何兩顆球體有重合時(shí),便可認(rèn)定為碰撞發(fā)生。并將航天器的運(yùn)動(dòng)軌跡以對(duì)應(yīng)顏色的線表示。此外,領(lǐng)航者與障礙物將分別以L和O表示,3顆跟隨衛(wèi)星則表示為F1、F2和F3。 根據(jù)表1中的信息,各航天器的初始相對(duì)位置如圖3所示。由圖3可知,初始時(shí),航天器編隊(duì)衛(wèi)星間相對(duì)距離很近且受到障礙物沖擊,若不進(jìn)行有效的避障控制,勢(shì)必將發(fā)生碰撞,如圖4所示。 利用式(33)所提出的勢(shì)函數(shù)以及式(10)~式(12)的控制方法,在與圖4相同的仿真時(shí)間點(diǎn),各航天器的相對(duì)位置如圖5所示,航天器編隊(duì)有效地規(guī)避了障礙物并避免了所有碰撞。 圖3 3D圖例:各航天器初始位置Fig.3 3D illustration: Initial positions of spacecrafts 圖4 3D圖例:碰撞情形Fig.4 3D illustration: Collision situation 圖5 3D圖例:障礙物規(guī)避及碰撞避免Fig.5 3D illustration: Obstacle and collision avoidance 在成功規(guī)避碰撞后,航天器編隊(duì)將逐漸遠(yuǎn)離障礙并跟隨領(lǐng)航衛(wèi)星的運(yùn)動(dòng),如圖6所示。最終,航天器成功形成既定構(gòu)型,并可實(shí)時(shí)跟隨領(lǐng)航衛(wèi)星的運(yùn)動(dòng),如圖7所示。 圖6 3D圖例:構(gòu)型初步形成Fig.6 3D illustration: Initial configuration 圖7 3D圖例:最終構(gòu)型Fig.7 3D illustration: Final configuration 圖8 衛(wèi)星間相對(duì)距離Fig.8 Relative distance between members in formation 編隊(duì)內(nèi)航天器的相對(duì)位置變化曲線在圖8中給出,其說(shuō)明航天器編隊(duì)在300 s內(nèi)即可形成預(yù)定構(gòu)型,穩(wěn)態(tài)相對(duì)距離誤差小于0.002 m,且衛(wèi)星之間無(wú)碰撞發(fā)生。圖9給出了編隊(duì)內(nèi)衛(wèi)星與障礙物的相對(duì)距離,3顆跟隨衛(wèi)星與障礙物之間的相對(duì)距離一直大于15 m,成功地規(guī)避了障礙。 圖9 跟隨衛(wèi)星與障礙物間相對(duì)距離Fig.9 Relative distance between followers and obstacle 4.2 存在執(zhí)行機(jī)構(gòu)故障時(shí)的仿真分析 在本小節(jié)中,假設(shè)航天器的執(zhí)行機(jī)構(gòu)存在各類故障。每顆跟隨衛(wèi)星推力器的工作情況如表4所示,且設(shè)推力器的漂移值為 (36) 表4 各推力器工況Table 4 Work condition of thrusters 仿真控制參數(shù)及初始條件與4.1節(jié)相同,但在本節(jié)中,航天器編隊(duì)不僅需要在初始時(shí)刻躲避4.1節(jié)中所描述的障礙物(記為O1),而且在之后的編隊(duì)飛行保持中,還將面臨另一障礙物(記為O2)的沖擊,其初始位置為[45,190,85] m,速度為[0,-0.2,0] m/s。 圖10給出了編隊(duì)航天器間的相對(duì)距離,其表明,即使在執(zhí)行機(jī)構(gòu)存在故障時(shí),航天器編隊(duì)仍可很好地實(shí)現(xiàn)構(gòu)型重構(gòu)與保持并跟蹤主星的運(yùn)動(dòng)。各跟隨衛(wèi)星與障礙物的相對(duì)距離在圖11中給出,進(jìn)一步表明航天器編隊(duì)在飛行保持中受到障礙物沖擊時(shí),仍可很好地規(guī)避碰撞。最后,各執(zhí)行機(jī)構(gòu)的實(shí)際輸出在圖12中給出,證明了仿真中執(zhí)行機(jī)構(gòu)確實(shí)存在各類故障。 圖10 故障情形下星間的相對(duì)距離Fig.10 Relative distance between members in formation under fault case 圖11 跟隨衛(wèi)星與障礙物的相對(duì)距離Fig.11 Relative distance between followers and obstacle 圖12 各推進(jìn)器的實(shí)際輸出Fig.12 Real outputs of thrusters 4.3 燃料消耗分析 最后,本節(jié)將從燃料消耗角度說(shuō)明本文方法的可行性。為進(jìn)行對(duì)比仿真,考慮文獻(xiàn)[23]中所提出的燃料最優(yōu)軌跡規(guī)劃方法。但由于文獻(xiàn)[23]中的方法只針對(duì)單跟隨衛(wèi)星及固定障礙物情形,故為進(jìn)行對(duì)比仿真,僅考慮單追蹤星情形,其初始位置和速度為 ρ(0)=[200,0,0]Tm v(0)=[0.03,0,-0.195 4]Tm/s 其與主星航天器的最終期望相對(duì)距離為30 m。且在接近過(guò)程中,航天器需規(guī)避障礙物,其位置為ρo=[170,0,0]Tm。仿真時(shí)間設(shè)為2 000 s,其他初始條件和仿真參數(shù)均與文獻(xiàn)[23]保持一致。燃料消耗的計(jì)算方法為 (37) 式中:f為執(zhí)行機(jī)構(gòu)輸出向量。兩種方法的燃料消耗對(duì)比如圖13所示,其中,“OPT”代表燃料最優(yōu)算法,“APF+SM”表示本文所提出算法。 圖13 燃料消耗對(duì)比Fig.13 Comparison of fuel consumption 由圖13的結(jié)果可知,相比較于燃料最優(yōu)搜索算法,本文的控制算法需要額外28.36%的燃料消耗。雖然本文算法不能達(dá)到燃料最優(yōu),但本文算法可被應(yīng)用于多航天器編隊(duì)控制中,且為編隊(duì)引入了避免內(nèi)部碰撞和躲避外來(lái)動(dòng)態(tài)障礙物的能力,更使閉環(huán)系統(tǒng)具備了執(zhí)行機(jī)構(gòu)容錯(cuò)能力,這是絕大多數(shù)燃料最優(yōu)算法無(wú)法保證的。此外,從方法角度來(lái)講,燃料最優(yōu)算法需要復(fù)雜的搜索過(guò)程,而本文所提出的反饋控制方法則避開(kāi)了這一問(wèn)題,計(jì)算代價(jià)與對(duì)硬件的需求更低,且可在理論上保證閉環(huán)系統(tǒng)的實(shí)時(shí)穩(wěn)定。從這些方面考慮,認(rèn)為本文方法所需要的額外燃料消耗是可以接受的。 1) 將勢(shì)函數(shù)制導(dǎo)方法與滑模控制相結(jié)合,使得航天器編隊(duì)具備了碰撞避免及障礙規(guī)避能力。 2) 自適應(yīng)律的引入使得所提出的控制方法進(jìn)一步具備了執(zhí)行機(jī)構(gòu)故障容錯(cuò)、參數(shù)自適應(yīng)以及對(duì)干擾的魯棒性。 3) 基于李雅普諾夫方法的分析證明了閉環(huán)系統(tǒng)的漸近穩(wěn)定性。 4) 典型的仿真分析驗(yàn)證了所提出控制方法的有效性。 [1] KAPILA V, SPARKS A G, BUFFINGTON J M, et al. Spacecraft formation flying: Dynamics and control[J]. Journal of Guidance, Control, and Dynamics, 2000, 23(3): 561-564. [2] REN W, BEARD R. Decentralized scheme for spacecraft formation flying via the virtual structure approach[J].Journal of Guidance,Control, and Dynamics, 2004, 27(1): 73-82. [3] BREAD R W, LAWTON J, HOW J P. A coordination architecture for spacecraft formation control[J]. IEEE Transactions on Control Systems Technology, 2001, 9(6): 777-790. [4] WANG P K C, HADAEGH F Y. Coordination and control of multiple microspacecraft moving in formation[J]. Journal of the Astronautical Scineces, 1996, 44(3): 315-335. [5] CANUTO E, COLANGELO L, LOTUFO M, et al. Satellite-to-satellite attitude control of a long-distance spacecraft formation for the next generation gravity mission[J]. European Journal of Control, 2015, 25(5): 1-16. [6] ZHOU N, XIA Y Q. Coordination control design for formation reconfiguration of multiple spacecraft[J]. IET Control Theory and Applications, 2015, 9(15): 2222-2231. [7] 鄭重, 宋申民. 考慮避免碰撞的編隊(duì)衛(wèi)星自適應(yīng)協(xié)同控制[J]. 航空學(xué)報(bào), 2013, 34(8): 1934-1943. ZHENG Z, SONG S M. Adaptive coordination control of satellites within formation considering collision avoidance[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(8): 1934-1943 (in Chinese). [8] HU Q L, DONG H Y, ZHANG Y M, et al. Tracking control of spacecraft formation flying with collision avoidance[J]. Aerospace Science and Technology, 2015, 42: 353-364. [9] ZHANG D, SONG S, PEI R. Safe guidance for autonomous rendezvous and docking with a noncooperative target[C]∥AIAA Guidance, Navigation, and Control Conference. Reston, VA: AIAA, 2010. [10] VARMA S, KUMAR K D. Fault tolerant satellite attitude control using solar radiation pressure based on nonlinear adaptive sliding mode[J]. Acta Astronautica, 2009, 66(3-4): 486-500. [11] RUITER A D. A fault tolerant magnetic spin stabilizing controller for JC2Sat-FF mission[J]. Acta Astronautica, 2011, 68 (1-2): 160-171. [12] JIN J, KO S, RYOO C K. Fault tolerant control for satellites with four reaction wheels[J]. Control Engineering Practice, 2008, 16 (10): 1250-1258. [13] CAI W, LIAO X, SONG D Y. Indirect robust adaptive fault-tolerant control for attitude tracking of spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2012, 31(5): 1456-1463. [14] XIAO B, HU Q, ZHANG Y. Finite-time attitude tracking of spacecraft with fault-tolerant capability[J]. IEEE Transactions on Control Systems Technology, 2015, 23(4): 1338-1350. [15] DONG H Y, HU Q L, MA G F. Dual-quaternion based fault-tolerant control for spacecraft formation flying with finite-time convergence[J]. ISA Transactions, 2016, 61(99): 87-94. [16] SINGLA P, SUBBARAO K, JUNKINS J L. Adaptive output feedback control for spacecraft rendezvous and docking under measurement uncertainty[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(4): 892-902. [17] KRISTIANSEN R, NICKLASSON P J. Spacecraft formation flying: A review and new results on state feedback control[J]. Acta Astronautica, 2009, 65(11-12): 1537-1552. [18] MURUGESAN S, GOEL P S. Fault-tolerant spacecraft attitude control system[J]. Sadhana, 1987, 11(1-2): 233-261. [19] RIMON E, KODITSCHEK D E. Exact robot navigation using artificial potential functions[J]. IEEE Transactions on Robotics and Automation, 1992, 8(5): 501-518. [20] BADAWY A, MCINNES C R. Small spacecraft formation using potential function[J]. Acta Astronautica, 2009, 65(11-12): 1783-1788. [21] GAZI V, ORDONEZ R. Target tracking using artificial potentials and sliding mode control[J]. International Journal of Control, 2007, 80(10): 1626-1635. [22] ZHANG F. The schur complement and its applications[M]. New York: Springer, 2006: 17-46. [23] LIU X F, LU P. Solving nonconvex optimal control problems by convex optimization[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 750-765. Fault-toleranttranslationalcontrolforspacecraftformationflyingwithcollisionavoidancerequirement MAGuangfu1,DONGHongyang1,*,HUQinglei2 1.SchoolofAstronautics,HarbinInstituteofTechnology,Harbin150001,China2.SchoolofAutomationScienceandElectricalEngineering,BeihangUniversity,Beijing100083,China Tosolvetheflyingsafetyissuesofspacecraftformation,includingfaulttoleranceandobstacle/collisionavoidance,anoveladaptivetranslationalcontrolmethodisproposed.Specifically,theproposedmethodcombinesthecoreideasofartificialpotentialfunctionguidanceandslidingmodecontrolmethod.Aspecialartificialpotentialfunctionisdesignedtoencodethecollision/obstacleavoidancerequirement,andthenacoordinationcontrollerispresentedtoenablethespacecraftformationtomaintainthepredeterminedconfigurationwhiletrackingatarget,andtobeabletoavoidallpossiblecollisionsbetweenmembersinformationorwithrespecttoanon-cooperativeobstacle.Furthermore,byintroducingadaptivelawsintothecontroller,therobustnessoftheclosed-loopsystemisfurtherimprovedinrespecttoexternaldisturbances,parameteruncertaintiesandevensevereactuatorfaults.Typicalsimulationsareperformedtoillustratetheeffectivenessoftheproposedmethod. spacecraftformationflyingcontrol;fault-tolerantcontrol;artificialpotentialfunctionguidance;obstacleavoidance;collisionavoidance 2017-01-13;Revised2017-03-28;Accepted2017-04-10;Publishedonline2017-04-171739 URL:http://hkxb.buaa.edu.cn/CN/html/20171020.html NationalNaturalScienceFoundationofChina(61522301,61633003) .E-maildonghongyang91@gmail.com http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn 10.7527/S1000-6893.2017.321129 V412.4+1 A 1000-6893(2017)10-321129-11 2017-01-13;退修日期2017-03-28;錄用日期2017-04-10;< class="emphasis_bold">網(wǎng)絡(luò)出版時(shí)間 時(shí)間:2017-04-171739 http://hkxb.buaa.edu.cn/CN/html/20171020.html 國(guó)家自然科學(xué)基金(61522301,61633003) * .E-maildonghongyang91@gmail.com 馬廣富,董宏洋,胡慶雷.考慮避障的航天器編隊(duì)軌道容錯(cuò)控制律設(shè)計(jì)J.航空學(xué)報(bào),2017,38(10):321129.MAGF,DONGHY,HUQL.Fault-toleranttranslationalcontrolforspacecraftformationflyingwithcollisionavoidancerequirementJ.ActaAeronauticaetAstronauticaSinica,2017,38(10):321129. (責(zé)任編輯:蘇磊)
2 人工勢(shì)函數(shù)設(shè)計(jì)




3 控制器設(shè)計(jì)與穩(wěn)定性分析

















4 仿真分析






5 結(jié) 論
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34