基于模型的設計方法的無刷直流電機控制研究
2017-11-17 07:16:01張才斗
裝備制造技術 2017年9期
張才斗,馬 杰
(長安大學 工程機械學院,陜西 西安710064)
基于模型的設計方法的無刷直流電機控制研究
張才斗,馬 杰
(長安大學 工程機械學院,陜西 西安710064)
用基于模型的設計方法開發電機控制系統是一種快捷有效地方法。以無刷直流電機為被控制對象,利用Simulink、Stateflow搭建邏輯算法模型,在MATLAB平臺上進行實現,經過模擬驗證,直接自動生成代碼下載到目標板上。設計者只需要了解工作原理,降低了嵌開發的難度,提高了開發效率,縮短了項目完成時間。
基于模型的設計方法;自動生成代碼;Simulink
隨著電力電子,集成電路的快速發展,無刷直流電機因其具有調速方便、易于控制和優良的調節使得無刷直流電機廣泛應用于數控機床、航空航天、計算機外圍設備等高科技領域中[1-3]。由于DSPTMS320F2812芯片具有強大的運算能力、可靠性邏輯控制功能和各種中斷處理功能,所以用DSP去控制無刷直流電機可以實現無刷直流電機高精準的控制及運行[4-5]。在基于DSP有位置無刷直流電機控制系統設計中,文獻[6],[7]系統軟件中軟件的I/O口的功能、PWM模塊的配置、邏輯導通及其算法的實現是用C語言去完成。這樣使得設計者要學會將電機的狀態轉換為C語言,增長了開發時間。文獻[8],[9]中Matlab上通過Simulink上搭建的仿真模型將模仿真的結果與理論分析進行驗證模型的正確,而不能將搭建的模型進行試驗。
本文采用基于模型的設計方法自動生成代碼,以TI公司和MathWorks公司聯合開發的Embed Coder工具箱為依托,采用TMS320F2812芯片作為主處理器,以無刷直流電機為被控對象,直接實現從設計理念到算法模型,再由模型自動生成嵌入式代碼的高效開發流程,設計者需要了解無刷直流電機及TMS320F2812的工作原理,只需注算法本身,將繁瑣的代碼生成工作交給計算機完成,創新點在于不用考慮復雜的代碼編輯,縮短開發周期。并且搭建的算法模型不僅能通過軟件在環進行仿真,還能自動生成代碼進行試驗。
1 原理分析
無刷直流電機系統由電動機本體、轉子位置檢測器和由控制電路和逆變橋電路構成的換相裝置三大部分組成。系統結構如圖1所示。無刷直流電機用定子上安裝電樞繞組、轉子上安裝永久磁體,并用位置檢測器檢測轉子的位置,檢測到的轉子位置信號通過控制電路處理后送給功率逆變橋電路,由功率逆變橋電路驅動電機連續運轉。
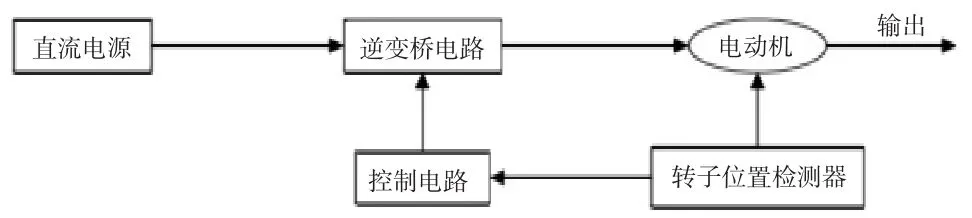
圖1 無刷直流電機系統基本結構
下面以Y接三相全橋兩兩導通方式為例,來簡要介紹無刷直流電機的工作過程,無刷直流電機三相全控電路圖如圖2所示,采用兩兩導通方式驅動,每隔60°電角度換相一次,每次只改變一個功率管,每個功率管導通角度為120°電角度。圖中包含6個晶體管、二極管組成的三相逆變電路,Ha、Hb、Hc為霍爾元件反饋的轉子位置信號,控制電路根據霍爾元件反饋的轉子位置信號決定6路PWM信號的通斷或導通,使電機定子繞組按照一定的次序通斷,實現自動電子換相,從而使電機連續運轉。
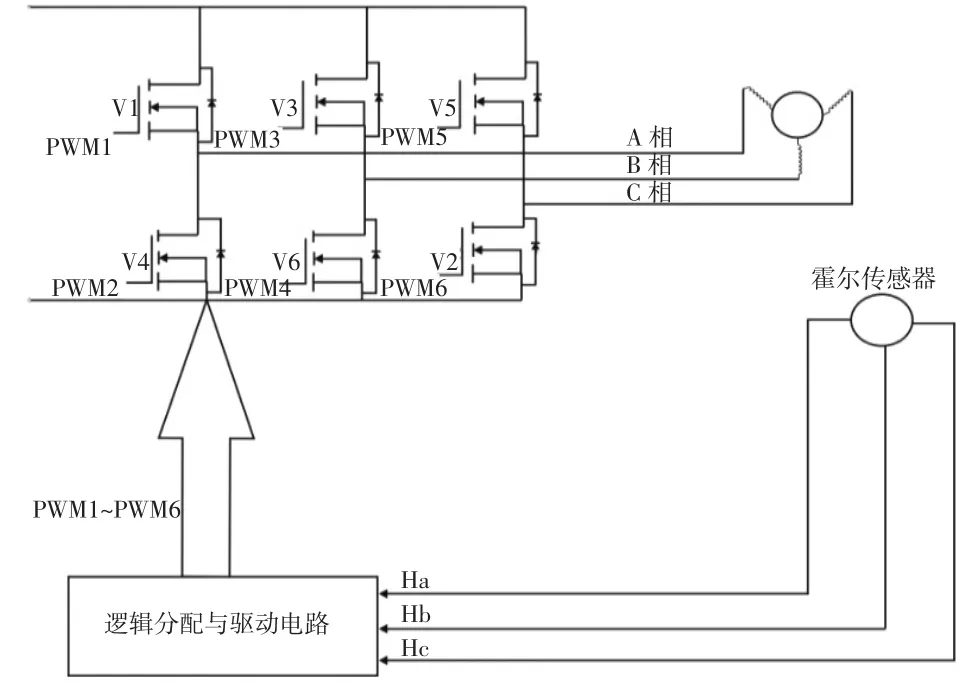
圖2 無刷直流電機全控電路結構圖
三個霍爾傳感器對稱分布在定子圓周上,當轉子N極靠近霍爾傳感器,即磁感應強度到達一定值時,霍爾傳感器輸出高電平,當N極逐漸離開霍爾傳感器,電磁強度逐漸減小,但輸出仍為高電平,只有當磁場變為S極并達到一定值時,其輸出才翻轉為低電平。轉子轉動,N-S極磁場交替轉換霍爾傳感器輸出的波形的高低電平比例相等,各占50%.即每個霍爾傳感器都會輸出180°脈寬的輸出信號,如圖3所示。無刷直流電機的準確換相就是依據這三個霍爾傳感器輸出信號的組合來確定的。每個周期內,霍爾傳感器輸出狀態數和電機工作狀態意義對應,在兩兩導通的方式中,一個周期內,共有6個工作狀態,表1表示電機的工作狀態與三個霍爾傳感器輸出的狀態的對應關系。
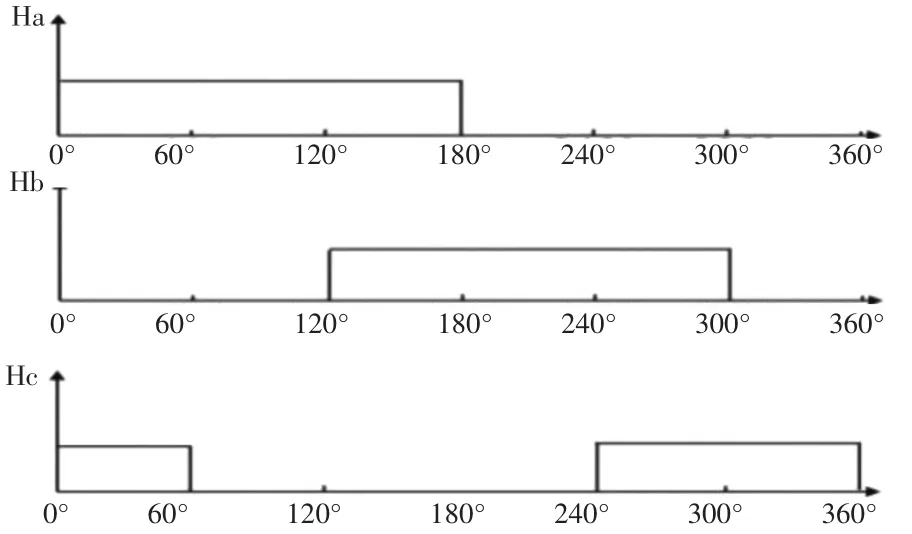
圖3 霍爾位置傳感器輸出三相霍爾信號波形圖
假設當前功率管V3、V6導通,則電流從B相流入電機,從C相流出電機,由電流經繞阻產生的磁場方向為(B,-C)。由 B和-C的定子電樞繞組合成磁矩使轉子轉動到BC位置。轉子的轉動使得霍爾傳感器的輸出發生變化,控制電路會據此調整功率管的導通情況,將 V6關斷,V1導通。這時,電流從 B相流入電機,從A相流出電機,經繞阻產生的磁場方向為(B,-A)。由 B和-A的定子電樞繞組合成磁矩使轉子轉動到BA位置。同樣,霍爾器件又會輸出一個不同的值,控制電路根據霍爾元件的輸出作出相應的處理,完成一個完整的換相周期。
2 模型搭建
通過上述原理分析,在Stateflow中創建正轉、反轉狀態圖,以dir的值控制電機的正反轉,由此得到無刷電機的正反轉的狀態圖,如圖4所示。
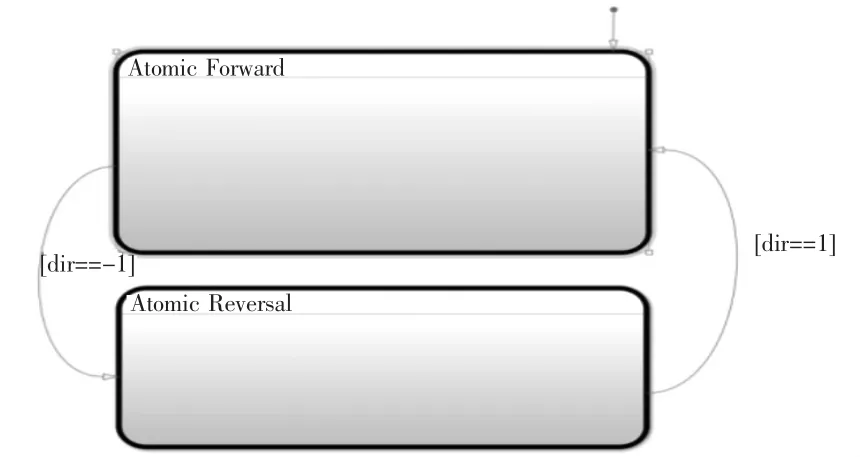
圖4 無刷電機的正反轉的狀態圖
根據表1霍爾傳感器輸出與開關狀態對應關系表及控制邏輯,sensor的值及其功率開關的導通情況,得到正轉狀態圖,如圖5所示。模型接收霍爾元件傳送回的電機轉子位置信號,并以此判斷功率開關的通斷跟PWM波形輸出的極性。當霍爾元件返回值為1時,T=0x7FD,十六進制7DF轉化為二進制為011111111110,則1、6路PWM 信號導通,并且極性值為PWM1為低有效,PWM2強制高,PWM3為強制高,PWM4為強制高,PWM5為強制高,PWM6為高有效;其他值類似。
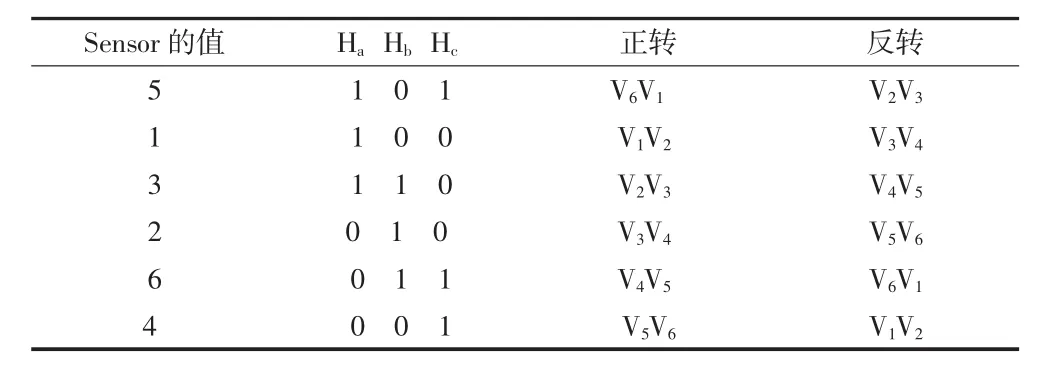
表1 霍爾傳感器
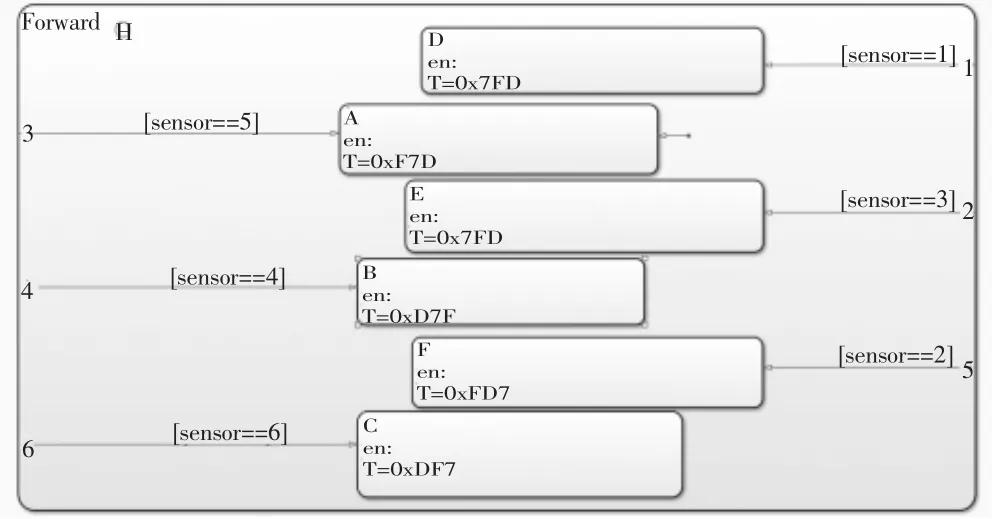
圖5 正轉狀態圖
Reversal子狀態跟Forward的子狀態基本類似,不同之處在于:模型接收霍爾元件傳送回的電機轉子位置信號,導通的功率開關不同,并且極性不同。
如表1所示,sensor的值為4時,5、6路PWM信號導通。將stateflow模塊再配合Simulink的庫模塊即可完成如圖6的算法模型。當dir=1時,電機處于正轉,霍爾傳感器的狀態為4時,Stateflow中T=0xD7F,十六進制D7F轉化為十進制為3455,則5、6路PWM信號導通,輸出的值為3455這證明算法模型達到了預期目的。而PWM信號占空比可用于調節電機轉速。在PWM占空比的設置只需要將PWM模塊中的Outputs選項下面的將各個PWM使能,并且Duty cycle設為想要的占空比,點擊OK即可。如圖7所示。
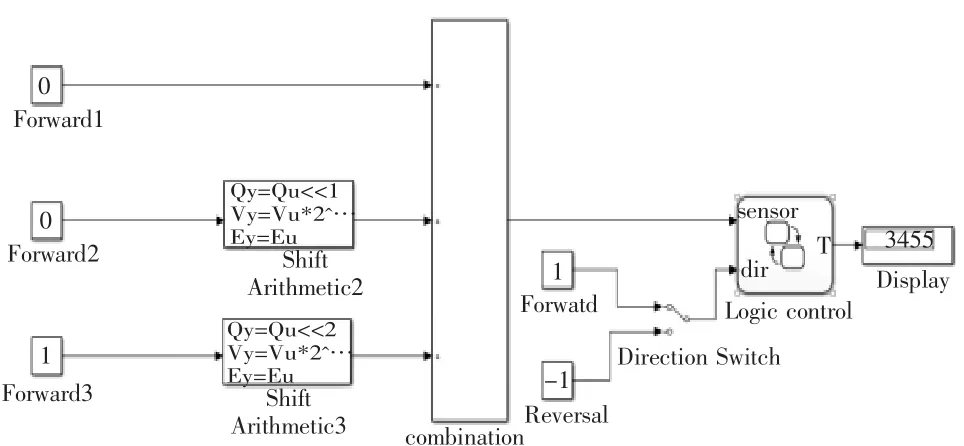
圖6 算法模型
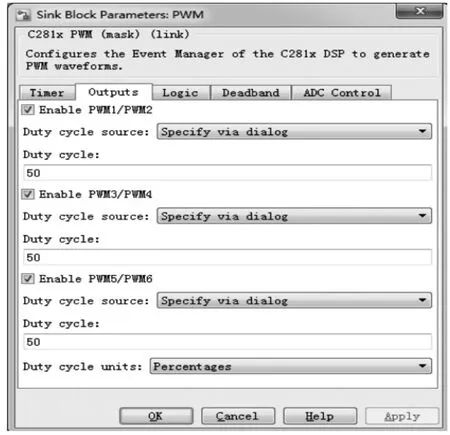
圖7 PWM占空比的設置
最后的生成代碼模型如圖8所示。
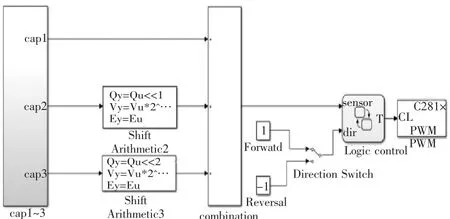
圖8 代碼模型
3 結束語
基于模型的設計為設計者提供了一個開發通用平臺,可將模型自動生成嵌入式C代碼,大大降低了嵌入式系統開發的門檻,設計者可輕松生成優化的C代碼,減少了很多認為錯誤,大大縮短開發周期。
[1]吳布托,淺談DSP在無刷直流電機控制系統中的應用[J].科技信息,2011(31):1.
[2]高慧敏,桂天真,崔儒飛,等.無刷直流電機PID調節參數整定研究[J].裝備制造技術,2014(9):1.
[3]薛粹松,王 英.基于TMS320F2812的DS_省略_刷直流電機控制系統的研究及其仿真[J].變頻器世界,2015(3):1-2.[4]李惠生,王 瑞.DSP在無刷直流電機控制中的應用研究[J].機電一體化,2014,11(6):1-2.
[5]盧小錦,基于DSP_BIOS的無刷直流電機控制系統的研制[J].自動化技術與應用,2011,30(5):2-3.
[6]劉海鋒,DSP控制系統在無刷直流電機調速中的應用[J].儀器儀表用戶,2012,3(10):1-2.
[7]黃 斌,DSP在無刷直流電機控制系統中的運用[J].防爆電機,2016,6(14):3-4.
[8]劉兆卿,王喜太,王 淼,等.基于DSP無刷直流電機控制系統的研究及其仿真[J].微計算機信息,2011,27(9):1-3.
[9]喬敏娟,韓文波,劉瑩瑩,等.基于DSP的無刷直流電機閉環控制系統的設計[J].計算機與現代化,2014(1):2-5.
Research on Brushless DC Motor Control Based on Model Design Method
ZHANG Cai-dou,MA Jie
(Chang’an University,School of Mechanical Engineering,Shaanxi Xi’an 710064,China)
It is a quick and effective method to develop a motor control system with a model-based design method.With the brushless DC motor as the controlled object,using Simulink,Stateflow to build the logic algorithm model,in the MATLAB platform to achieve,through simulation verification,direct automatic generation of code downloaded to the target board.Designers only need to understand the working principle,reducing the difficulty of embedded development,improve the development efficiency,shorten the project completion time.
model-based design method;automatic generation of code;Simulink
TM361
A
1672-545X(2017)09-0066-03
2017-06-06
張才斗(1991-),男,山東濰坊人,碩士研究生,主要研究方向:電機控制、simulink仿真、dsp控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03