基于二維碼定位導航的兩輪差速轉向AGV設計
2017-11-22 14:01:50楊友良胡少輝趙麗宏毛志強
物流科技 2017年10期
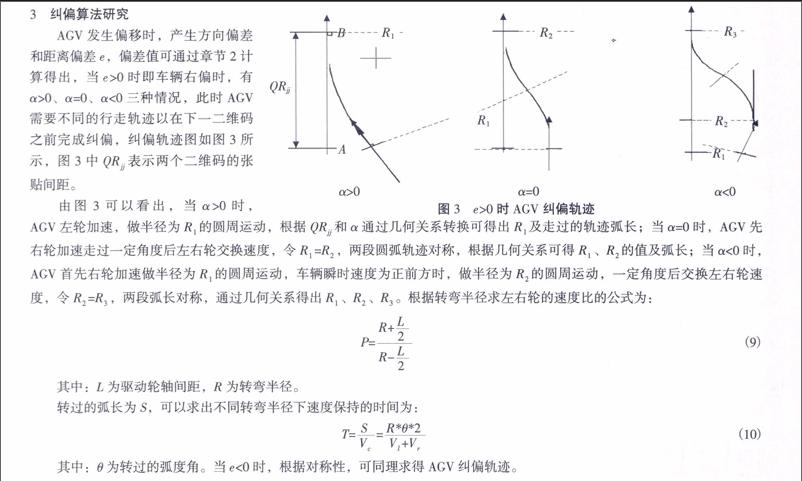
楊友良++胡少輝++趙麗宏++毛志強
摘 要:為了提高導引柔性,降低維護成本,將二維碼技術應用到視覺導引AGV定位導航中。首先分析差速轉向AGV運動學模型。將包含有坐標信息的二維碼間隔一定距離粘貼到對應位置,車載工業相機捕捉到二維碼圖像后,返回二維碼包含的AGV位置坐標并提取二維碼特征點在圖像坐標系中的坐標,通過坐標轉換得到AGV位置偏差和角度偏差,進而對AGV兩輪速度進行調整以實現糾偏,實驗證明:基于二維碼圖像標簽定位導航的視覺導引AGV定位精確,運行靈活穩定,可應用到作業現場。
關鍵詞:二維碼技術;視覺導引;差速轉向AGV;定位導航
中圖分類號:F253.9 文獻標識碼:A
Abstract: In order to improve the flexibility of navigation and reduce maintenance cost, two-dimensional code technology is applied to vision guided AGV positioning navigation. Firstly, the kinematic model of differential steering AGV is analyzed. Affixed the two-dimensional code contains coordinate information to the corresponding position at a certain distance, vehicle industrial camera to capture the two-dimensional code image, coordinate AGV coordinates return two-dimensional code contains two-dimensional code and extract the feature points in the image coordinate system, AGV position deviation and angle deviation obtained by coordinate transformation, and the two AGV the speed of adjustment to achieve rectification, prove that AGV car experiment: two-dimensional code label image positioning and navigation based on vision guided AGV precise positioning, flexible and stable operation, can be applied to the work site.
Key words: two-dimensional bar code technology; vision guidance; differential steering AGV; positioning navigation
0 引 言
自動導引車是一種以蓄電池為動力源,裝有非接觸控制導向裝置的無人駕駛車輛,它可在出發地與目的地之間駕駛運行,廣泛應用于自動化物流及柔性生產組織系統[1]。
國內的AGV研究起步較晚,隨著經濟發展與投入的加大,國內AGV技術發展迅速,AGV需求量居國際前列[2]。
根據導引方式的不同,AGV可分為激光導引、慣性導航、電磁導航、視覺導引等,激光導引成本較高,對環境要求較高。慣性導航成本較高,累積誤差大。電磁導航與磁導航均需要埋設導引金屬線,難以適應新的需求[3]。V—AGV利用CCD采集地面鋪設的白色路標信息,經過對圖像處理來識別路徑,并根據車輛與路徑軌跡之間相對位置的判斷結果,來控制車輛運行方向的一種導引方式,由于計算機圖形信息豐富,智能化水平較高,廣泛應用于AGV自主導航[4]。
本文基于視覺導引方式,從降低維護成本,提高導引柔性出發,在系統中引入二維碼技術,將包含有位置信息的二維碼粘貼到對應地面坐標點,通過對車載工業相機拍攝到二維碼圖像識別處理進行定位導航。主要內容有:(1)差速AGV運動學模型分析;(2)根據二維碼特征點坐標確定位置偏差與角度偏差;(3)根據偏差對AGV進行糾偏。
1 差速AGV運動學分析
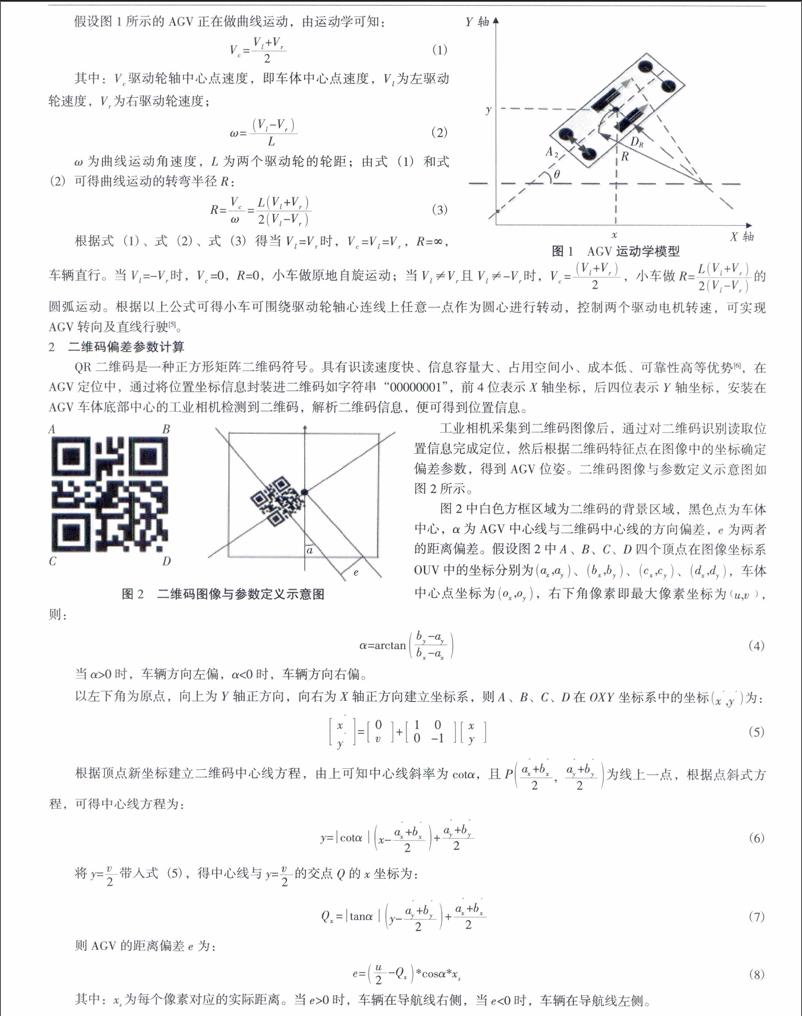
差速AGV主要通過兩輪差速進行轉向控制和曲線運動控制,轉動的方向和曲線運動的半徑可通過兩輪旋轉方向及兩輪的速度差ΔV來實現。AGV運動學模型如圖1所示。
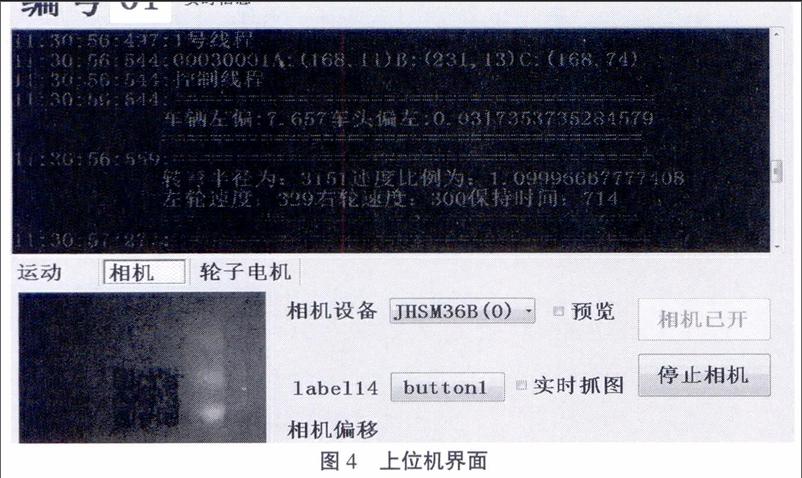
4 AGV實驗運行
在AGV本體進行實驗,主控機采用SC-G17工控電腦,驅動系統采用優普路直流無刷驅動器,相機采用京航JHSM36Bf工業相機,AGV運行速度為0.3m/s,二維碼的張貼間距為700mm,二維碼規格為13.5*13.5mm,設置相機分辨率為320*240,計算得出每個像素對應實際尺寸為0.2mm,AGV行駛過程上位機界面如圖4所示,多次實驗表明基于二維碼定位導航的AGV定位精確,運行穩定,可實現在穩定運行導航的前提下降低維護成本,提高導引柔性,可有效應用到作業現場。
在多次AGV本體實驗過程中,總結出對AGV導航行駛影響較大的三種因素:(1)光照不均勻嚴重影響圖像采集;(2)地面不平或光滑會導致驅動輪打滑或轉空;(3)二維碼張貼不整齊,導致AGV車輛S形前進。
本導航方式充分利用了二維碼圖像的有效信息,維護成本低,路徑靈活,可應用到柔性作業車間。
參考文獻:
[1] 王榮本,儲江偉,馮炎,等. 一種視覺導航的實用型AGV設計[J]. 機械工程學報,2002(11):135-138.
[2] 張漢斌. 用于電商配送中心的物流倉儲搬運機器人的研究[D]. 北京:北京物資學院(碩士學位論文),2014.
[3] 吳文軍,張巖,吳為民,等. 一種運輸自動導引車導航方法研究[J]. 物聯網技術,2016(6):58-62.
[4] 樸磊,李劍中,馮剛. 視覺導引AGV的數字圖像處理[J]. 儀器儀表學報,2006(z1):766-767.
[5] 姚建余,林義忠,黃斌鵬,等. AGV減震彈簧剛度的選擇及仿真[J]. 裝備制造技術,2016(2):13-16.
[6] 于娟. 基于QR二維碼技術的AGV系統在倉儲中的應用設計[J]. 天津職業技術師范大學學報,2015(3):44-47.endprint