新型操舵控制系統(tǒng)余度管理技術(shù)
2017-11-27 08:34:22曹永恒黃文斌孫靈遠任元洲羅勇平
艦船科學技術(shù) 2017年11期
曹永恒,黃文斌,黃 晶,孫靈遠,任元洲,羅勇平
(1. 中國船舶及海洋工程設(shè)計研究院,上海 200011;2. 中國船舶重工集團公司第七〇七研究所 九江分部,江西 九江 332007;3. 九江精密測試技術(shù)研究所,江西 九江 332000)
新型操舵控制系統(tǒng)余度管理技術(shù)
曹永恒1,黃文斌2,黃 晶3,孫靈遠2,任元洲2,羅勇平2
(1. 中國船舶及海洋工程設(shè)計研究院,上海 200011;2. 中國船舶重工集團公司第七〇七研究所 九江分部,江西 九江 332007;3. 九江精密測試技術(shù)研究所,江西 九江 332000)
為提高船舶操舵控制系統(tǒng)的可靠性,提出采用四通道余度管理技術(shù),4套操舵控制箱互為備份,通過數(shù)據(jù)交叉鏈路和控制指令表決處理的冗余設(shè)計,當N(N≤3)套操舵控制箱發(fā)生故障下,保證系統(tǒng)還能正常運行并可靠工作。該技術(shù)在大型船舶自動操舵儀和無人船等領(lǐng)域具有良好的應用前景。
余度管理;操舵控制;自動航跡
0 引 言
余度技術(shù)是提高系統(tǒng)任務可靠性與安全可靠性的一種重要手段,余度部件效能的發(fā)揮程度主要取決于余度管理策略和方法,余度管理技術(shù)廣泛應用于航空試驗機[1]、無人機[2-4]、客機[5]、飛行控制[7]、機載計算機[8]、液壓伺服回路[9]等,但在船舶操縱領(lǐng)域相關(guān)研究和應用均較少[10]。
操舵控制余度系統(tǒng)的關(guān)鍵技術(shù)之一是余度管理技術(shù),余度管理是決定系統(tǒng)可靠性的關(guān)鍵因素,也是容錯管理的主要功能,操舵控制系統(tǒng)的故障容錯能力主要通過系統(tǒng)的余度管理來實現(xiàn)[6]。余度管理通過硬件與軟件結(jié)合的方法,保證基于余度設(shè)計的系統(tǒng)正確協(xié)調(diào)地工作,監(jiān)控系統(tǒng)運行并完成故障檢測及處理工作的功能。余度管理是余度和容錯設(shè)計的核心,是余度系統(tǒng)獲取高任務可靠性的關(guān)鍵技術(shù)。
為提高船舶操舵控制系統(tǒng)的可靠性,確保船舶在全球各海域和復雜海況下安全可靠航行,本文提出基于余度設(shè)計的體系結(jié)構(gòu),采用最新的余度管理技術(shù),運行位于舵機操控室的4套指令發(fā)送箱的余度管理軟件,以實現(xiàn)系統(tǒng)的余度管理和容錯控制功能。
1 實現(xiàn)途徑
在操舵控制余度系統(tǒng)中,操舵控制余度計算機通過局域以太網(wǎng)及CAN總線實現(xiàn)互聯(lián),并與各操舵部位相連接。4套操舵控制余度計算機獨立運行相同的余度管理軟件,完整的軟件處理包括初始化、同步、數(shù)據(jù)輸入/采集、輸入/采集數(shù)據(jù)交叉?zhèn)鬏敗⑤斎?采集數(shù)據(jù)比較、控制律計算、輸出數(shù)據(jù)交叉?zhèn)鬏敗⑤敵鰯?shù)據(jù)比較和故障處理等幾個重要環(huán)節(jié)。余度管理軟件主要通過同步算法、數(shù)據(jù)交叉鏈路算法、表決算法等關(guān)鍵算法實現(xiàn)系統(tǒng)的余度管理功能。
4套操舵控制余度計算機通道間采用交叉數(shù)據(jù)鏈路(CCDL)進行信息交換,采用任務級同步算法實現(xiàn)通道同步工作。4個通道始終熱備份運行相同任務,基于交叉數(shù)據(jù)鏈路對操舵相關(guān)數(shù)據(jù)進行表決和監(jiān)控。在實時運行中,為了消除各通道之間的時鐘誤差,保證各通道在參加表決監(jiān)控時必須同步工作,在每一周期執(zhí)行任務之前,首先對各有效通道進行同步。通過同步監(jiān)控對同步結(jié)果進行檢測,如發(fā)現(xiàn)某個通道在規(guī)定的時間內(nèi)未參加同步,則判該通道與其他通道失步,在本周期后面的處理中失步通道不再參加表決。
在任意時刻,系統(tǒng)選取某一余度計算機作為主計算機(控制權(quán)計算機),主計算機除有權(quán)進行控制輸出外,同時還由其發(fā)出指令對故障通道進行隔離。在系統(tǒng)無故障且表決結(jié)果滿足多數(shù)一致的條件時,系統(tǒng)采用固定優(yōu)先級的策略,由1#通道的余度計算機掌握控制權(quán)并輸出控制量,2#、3#和4#通道的余度計算機處于監(jiān)控狀態(tài),參與表決但不進行控制輸出。在高優(yōu)先級通道故障時,系統(tǒng)次優(yōu)先級通道將按照固定的優(yōu)先級順序依次接管控制權(quán)。在表決結(jié)果不滿足多數(shù)一致的條件時,選取置信度最高的通道接管控制權(quán)。
在自動操舵方式下,在某一特定同步周期,各操舵控制箱余度計算機根據(jù)該同步周期的航向、航速、經(jīng)緯度等導航信息,通過交叉數(shù)據(jù)鏈路傳輸,經(jīng)通道交叉表決后,采用該同步周期統(tǒng)一的航向、航速和經(jīng)緯度等導航信息進行控制律運算,計算出指令舵角,各通道計算結(jié)果再次通過交叉數(shù)據(jù)鏈路,在通道間進行交叉表決,確定1路作為該同步周期的指令舵角信號發(fā)送至系統(tǒng)總線,作為操舵控制輸出指令。由于船舶運動姿態(tài)數(shù)據(jù)變化相對緩慢,且輸入信號的不一致最終會體現(xiàn)在計算的輸出信號上,所以輸入信號的表決可以省略,這樣也可減少CAN總線的傳輸負擔,提高傳輸?shù)男屎涂煽啃浴?/p>
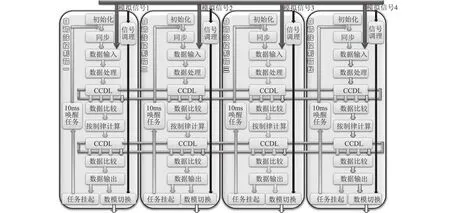
圖 1 自動操舵方式余度管理總流程圖Fig. 1 The overall flow chart of redundancy management for automatic steering
2 同步及表決算法
余度管理的關(guān)鍵環(huán)節(jié)在于同步處理和表決處理2個環(huán)節(jié)。
在操舵控制余度系統(tǒng)中,各余度計算機運行相同的計算任務,將計算結(jié)果進行比較、表決,從而達到提高整個余度控制系統(tǒng)可靠性的目的。為保證各余度控制計算機在比較、表決時的數(shù)據(jù)是同一次計算的結(jié)果,以維持計算數(shù)據(jù)的一致性,就必須同步(見圖2),使各余度控制計算機在同一段時間內(nèi)運行相同的計算任務。操舵控制余度系統(tǒng)采用任務級同步算法實現(xiàn)各余度計算機的同步,任務級同步算法無法實現(xiàn)物理(硬件)意義上的精確同步,各通道之間最大的同步誤差為系統(tǒng)設(shè)定的同步上限。各通道余度計算機以操作系統(tǒng)用戶任務的最高優(yōu)先級啟動同步任務,各余度計算機的同步幀在CAN總線上傳輸,各同步幀采用高優(yōu)先級的幀ID(ID值越小優(yōu)先級越高),以確保同步幀在CAN總線中傳輸?shù)膶崟r性。同步算法由余度管理程序的同步任務模塊完成。
各通道余度計算機啟動后進入同步任務,在各通道取得同步后,才可進行操舵控制計算。在每個同步周期,各通道操舵控制余度計算機運行應用程序進行操舵控制計算,得到計算結(jié)果后進入同步點(由信號量進行控制)。在同步點,各通道操舵控制余度計算機首先產(chǎn)生本周期的同步幀,攜帶記錄發(fā)送操舵控制余度計算機的編號,運行周期序號等信息,廣播到其他操舵控制余度計算機。操舵控制余度計算機檢查收到的其他余度計算機的同步幀,判斷其他操舵控制余度計算機進入同步點或是處于同步接收等待狀態(tài)。
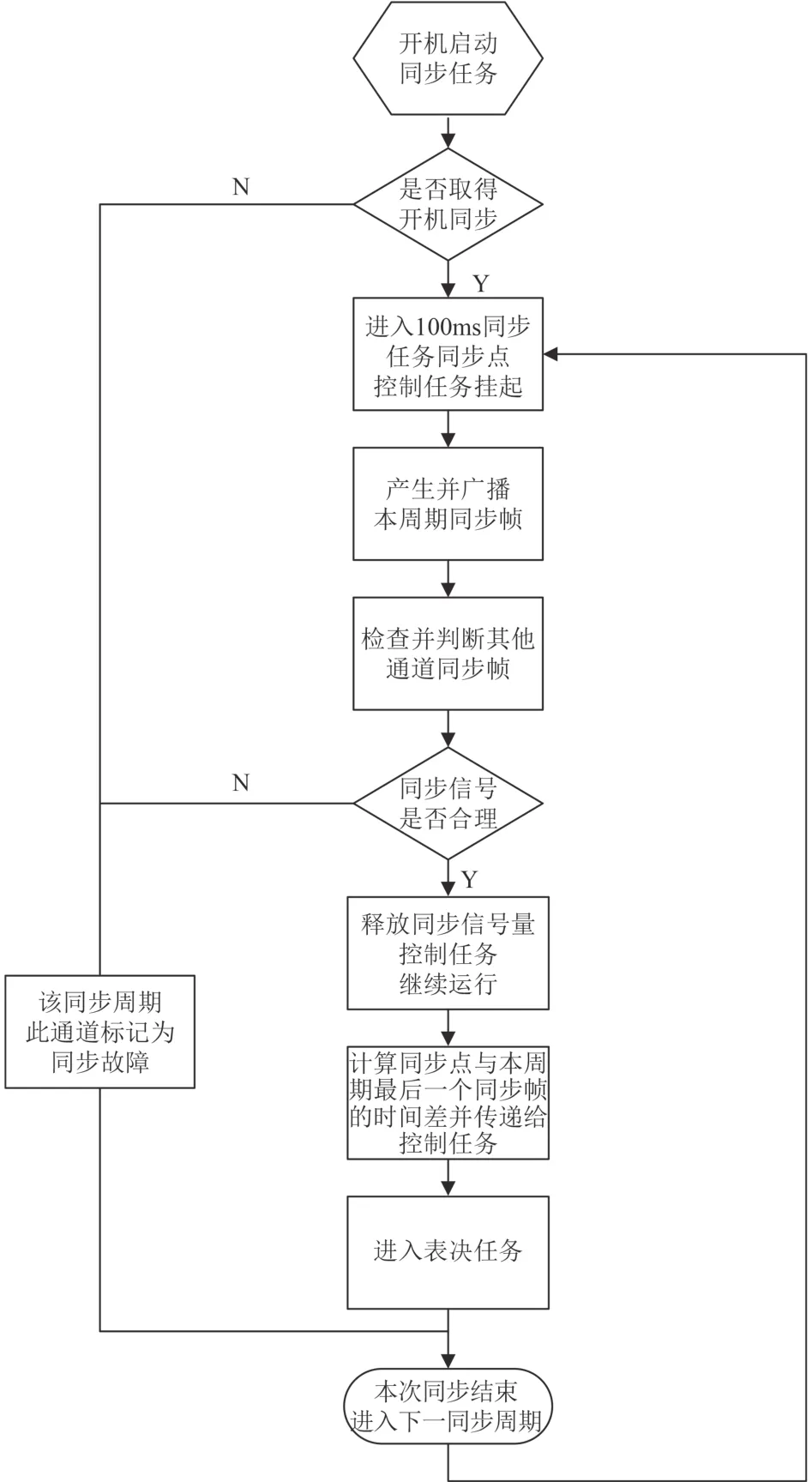
圖 2 余度管理的同步算法流程圖Fig. 2 The flow chart of synchronization algorithm for redundancy management
如果操舵控制余度計算機在同步等待時間到達上限之前收到所有其他操舵控制余度計算機的合理同步幀,則同步成功,計算出操舵控制余度計算機進入同步點與收到最后一個同步幀之間的時間,將此值作為時間差參數(shù)傳遞給上層應用軟件,結(jié)束本次同步;否則,認為操舵控制余度計算機同步失敗。通知上層應用程序按照同步算法傳遞的時間差參數(shù)進行延時,以保證在下一個運行周期四通道中的各操舵控制余度計算機的應用程序同時開始。
在自動操舵模式下,操舵控制箱的控制輸入信號為指令航向和實際航向、航速、經(jīng)緯度,輸出信號為指令舵角。故障通道不具有表決權(quán),工作正常的通道進入同步環(huán)節(jié)。同步算法是表決算法的前提和基礎(chǔ),未同步的通道自動取消本同步周期的表決資格,取得同步的通道進入表決環(huán)節(jié)。在操舵控制余度系統(tǒng)中,未發(fā)生故障且取得同步的通道具有表決權(quán)。
各通道計算機在任務啟動后,根據(jù)各計算周期計算結(jié)果的正確度開始計算自身的置信度。以固定的優(yōu)先級和變化的置信度作為表決的權(quán)重指標。表決算法由余度管理程序表決任務模塊完成。表決任務模塊負責控制指令的表決輸出。
操舵控制箱1、操舵控制箱2、操舵控制箱3和操舵控制箱4通過交叉數(shù)據(jù)鏈路(CCDL)交換各自計算/采集的指令舵角(指令舵角在自動操舵模式下通過控制律計算取得,在手動操舵模式下通過AD采集取得)。采用多數(shù)一致表決方式,誤差在設(shè)定范圍內(nèi)認為一致,計算結(jié)果為多數(shù)一致的通道具有表決權(quán),對于某特定同步周期,在具有表決權(quán)的通道中按照設(shè)定優(yōu)先級確定唯一通道輸出指令舵角。
余度管理表決算法流程圖如圖3所示。在無故障通道的情況下,在四通道輸出結(jié)果一致(4:0)的情況下,以設(shè)定優(yōu)先級高的通道輸出作為表決輸出。當四通道輸出為3:1或2:1:1的情況時,滿足多數(shù)一致的要求,以設(shè)定優(yōu)先級高的通道輸出作為表決輸出。當四通道輸出為2:2或1:1:1:1的情況時,不滿足多數(shù)一致的要求,以置信度高的通道作為主通道,主通道發(fā)出表決不一致系統(tǒng)報警,并提示操舵人員進行干預。
3 仿真結(jié)果
對該型操舵控制系統(tǒng)設(shè)備進行半物理仿真試驗,半物理仿真試驗包括回轉(zhuǎn)試驗和自動航跡仿真試驗,具體仿真試驗結(jié)果如圖4和圖5所示。
圖4為船舶四通道輸出出現(xiàn)2:2的情況時的回轉(zhuǎn)試驗仿真曲線,此時不滿足多數(shù)一致的要求,以置信度高的高優(yōu)先級通道輸出作為表決輸出,從圖中可以看出,根據(jù)本文所提出的表決處理算法,仍能保證操舵儀輸出正確且有效的輸出指令,船舶能較為準確地完成回轉(zhuǎn)試驗。

圖 3 余度管理表決算法流程圖Fig. 3 The flow chart of voting algorithm for redundancy management
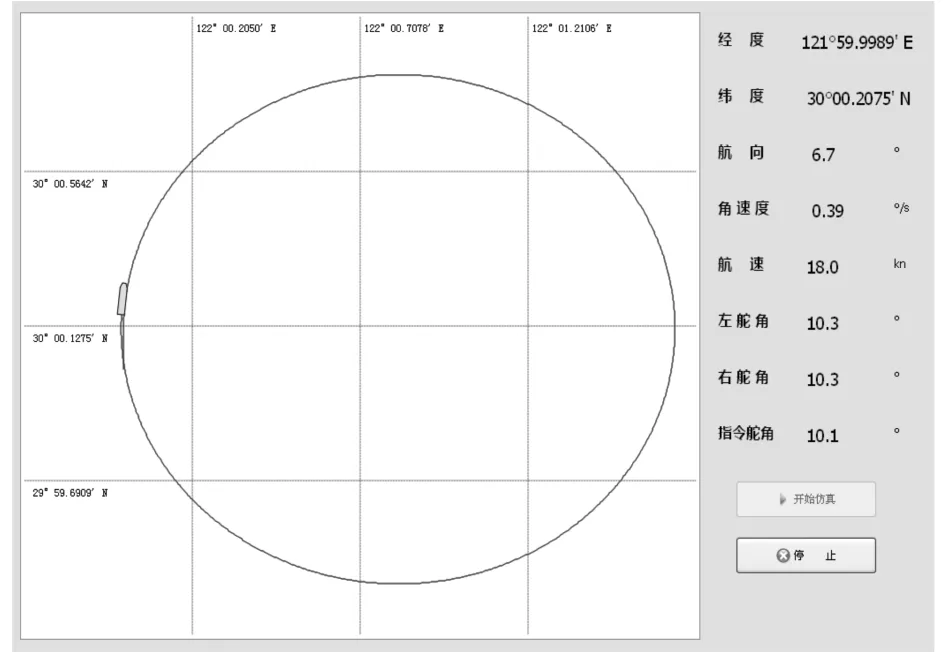
圖 4 回轉(zhuǎn)試驗仿真曲線圖Fig. 4 Simulation curve graph of turning test
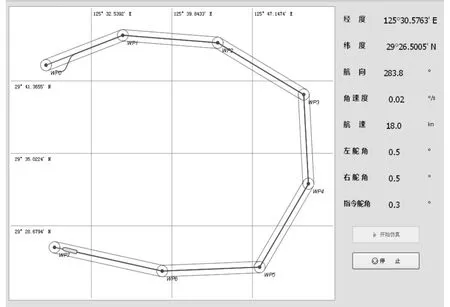
圖 5 自動航跡仿真曲線圖Fig. 5 Simulation curve graph of automatically tracking
圖5為某通道輸出指令與其他三通道(3:1)不一致時的某型船舶自動航跡仿真曲線圖。通過仿真曲線圖顯示,在某通道輸出指令出現(xiàn)故障時,根據(jù)本文所提出的表決處理算法,仍能保證操舵儀輸出正確且有效的輸出指令,船舶能較為準確地跟蹤給定航跡,且航跡穩(wěn)定精度滿足操舵儀指標要求。
4 結(jié) 語
本文針對于大型船舶自動操舵儀操舵故障問題,提出采用四指令發(fā)送箱余度管理技術(shù),通過數(shù)據(jù)交叉鏈路和控制指令/監(jiān)控報警表決處理的冗余設(shè)計,當N(N≤3)套指令發(fā)送箱發(fā)生故障下,保證系統(tǒng)還能正常運行,有效工作。該型操舵儀系統(tǒng)通過回轉(zhuǎn)和自動航跡的半物理仿真試驗,其中回轉(zhuǎn)試驗輸出指令出現(xiàn)2:2的情況時,該操舵儀經(jīng)表決處理輸出正確且有效的控制指令,船舶能較為準確地完成回轉(zhuǎn)試驗;在進行自動航跡的半物理仿真試驗,某通道輸出指令與其他三通道(3:1)不一致時,該操舵儀經(jīng)表決處理,仍能保證操舵儀輸出正確且有效的控制指令,船舶能較為準確地跟蹤給定航跡,且航跡穩(wěn)定精度滿足操舵儀指標要求。
[1]BOLDUC L P. Redundancy management system for the X-33 vehicle and mission computer[C]//Digital Avionics Systems Conference, 2000. Proceedings. Dasc. the. IEEE, 2000:1C3/1-1C3/7 vol. 1.
[2]王沖. 高空長航時無人機飛控計算機仿真機系統(tǒng)余度管理技術(shù)研究[D]. 西安: 西北工業(yè)大學, 2007.
[3]張小林. 小型飛行器機載計算機的余度設(shè)計技術(shù)[J]. 西北工業(yè)大學學報, 2001, 19(2): 274-278.ZHANG Xiao-lin. On designing the difficult-to-implement RPV computer[J]. Journal of Northwestern Polytechnical University, 2001, 19(2): 274-278.
[4]王軍強, 朱章華. 多余度機載計算機的余度管理[J]. 彈箭與制導學報, 2007, 27(5): 197-199.
[5]WANG Jun-qiang, ZHU Zhang-hua. Redundancy management in multi-modular redundancy airborne computer [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2007, 27(5):197-199.
[6]李利春. 用于飛機飛行控制的再組織余度管理技術(shù)[J]. 機器人, 1979(5): 84-85.
[7]王道彬, 陳懷民, 康芳, 等. 三余度飛控系統(tǒng)余度管理算法設(shè)計與實現(xiàn)[J]. 計算機測量與控制, 2007, 15(11): 1621-1623.WANG Dao-bin, CHEN Huai-min, KANG Fang, etc. Design and realization of treble-redundancy management method of flight control system[J]. Computer Measurement amp; Control,2007, 15(11): 1621-1623.
[8]杜永良, 潘妍紅. 波音777飛機高升力控制系統(tǒng)余度管理分析[J]. 民用飛機設(shè)計與研究, 2012(3): 33-34.DU Yong-liang, PAN Yan-hong. Redundancy management for high lift control system based on boeing 777 aircraft[J]. Civil Aircraft Design amp; Research, 2012(3): 33-34.
[9]王琴, 陳欣, 呂迅竑. 飛行控制計算機余度管理策略研究[J].信息技術(shù), 2012(6): 60-64.WANG Qin, CHEN Xin, LV Xun-hong. Research on redundancy management for flight control computer[J].Information Technology, 2012(6): 60-64.
[10]吳松齡. 變結(jié)構(gòu)容錯總線控制器余度管理算法設(shè)計[J]. 測控技術(shù), 2016, 35(8): 115-117.WU Song-ling. Design and realization of redundancy management method in variable structure bus controller [J].Measurement amp; Control Technology, 2016, 35(8): 115-117.
[11]SIMS J T. Redundancy management software services for Seawolf ship control system[J]. 1997: 390-394.
[12]朱強. 數(shù)傳液壓伺服回路校準及余度管理研究與實現(xiàn)[D]. 西安: 西北工業(yè)大學, 2007.
[13]RAY A, DESAI M. A redundancy management procedure for fault detection and isolation[J]. Journal of Dynamic Systems Measurement amp; Control, 1986, 108(3): 248-254.
Redundancy management technology for a new rudder control system
CAO Yong-heng1, HUANG Wen-bin2, HUANG Jing3, SUN Ling-yuan2, REN Yuan-zhou2, LUO Yong-ping2
(1. Marine Design and Research Institute of China, Shanghai 200011, China; 2. Jiujiang Branch of the 707 Research Institute of CSIC, Jiujiang 332007, China; 3. Jiujiang Precision Measuring Technology Research Institute, Jiujiang 332000, China)
In order to improve the reliability of the ship rudder control system, the four-channel redundancy management technology is proposed. Four sets of steering control cabinets are backup mutually. Through redundant design of crosschannel data link and control command voting, when N(N≤3) sets of steering control cabinets are under failure, the proposed method ensures that the system can operate effectively and normally. In the fields of automatic pilot instruments of large vessels and unmanned vessels, the method has good application prospect.
redundancy management;steering control;automatically tracking
TP391
A
1672-7649(2017)11-0136-05
10.3404/j.issn.1672-7649.2017.11.026
2017-02-16;
2017-05-05
曹永恒(1979-),男,碩士,高級工程師,主要從事艦船電子通信導航系統(tǒng)設(shè)計研究。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
艦船科學技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
科技傳播(2019年22期)2020-01-14 03:06:34
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
消費導刊(2017年20期)2018-01-03 06:26:40
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
