目標智能識別與跟蹤系統
2017-11-27 22:33:16肖哲治崔景茂趙浩然滕飛汪夏
物聯網技術 2017年11期
肖哲治+崔景茂+趙浩然+滕飛+汪夏
摘 要:文中設計了一套目標智能識別與跟蹤系統。該系統采用安卓作為終端,將四旋翼無人機作為搭載平臺,通過無人機攝像頭采集信息,經模塊化識別技術處理信息。經測試,該系統可遠程互動,機動性強,可廣泛應用于軍事目標定位和打擊、災難救援現場的目標搜尋和鎖定、緊急物資的遠程快速運輸等領域,具有深厚的開發潛力。
關鍵詞:智能識別;跟蹤
1 作品簡介
作品設計的初衷為軍事目標的自主識別和打擊。系統采用安卓設備作為終端,將四旋翼無人機作為搭載平臺,使用無人機的攝像頭采集信息,借助模塊化識別技術處理信息,具有自主行動能力與設定目標按照既定路線行動、既定目標識別與跟蹤、視頻實時傳輸等功能。
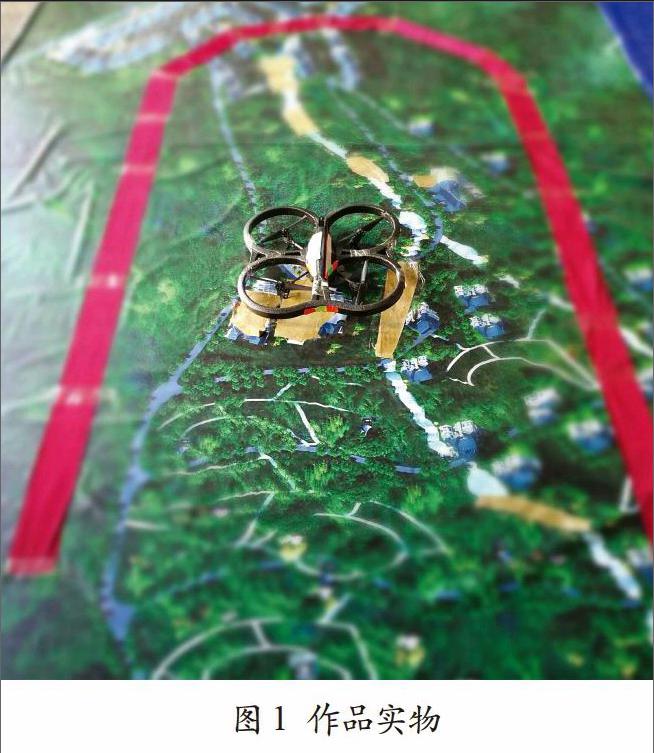
作品通過無人機的攝影功能獲取圖像,將圖像傳回后在安卓設備上通過圖像處理和模塊識別技術進行目標識別和數據分析處理,設備根據處理結果來產生下一步行動方案,控制無人機的行動。同時使用者可以根據無人機發回的實時視頻信息進行人工操控,使無人機能夠按照使用者的想法行動,真正實現自主可控。本作品具有遠程互動、自動智能、機動性強等特點,能夠滿足無人化、小型化、自動化的工作條件,可針對目的進行改進和加工,具有廣泛的應用范圍和深厚的開發潛力。作品實物如圖1所示。
2 工作原理
作品通過無人機的攝影功能進行圖像采集,將圖像傳回后在安卓設備上采用圖像處理和模塊識別技術進行目標識別和數據分析處理,設備根據處理結果產生行動方案,自主控制無人機的行動。
2.1 圖像處理技術
通過無人機下方的攝像頭采集圖像信息,進行三通道濾波得到濾波后的圖像,之后對圖像進行邊緣檢測。在識別路線時,通過對圖像信息的掃描,利用統計學模型得到形心值和旋轉量,從而實現圖像處理的目的。
2.2 模式識別技術
對無人機采集的周圍環境圖像信息進行預處理,輸入采樣數據,求出模式識別所必需的特征變量,最后根據獲得的當前時刻的特征變量搜索與提供約束條件相匹配的特征模式類進行分類判決,從而確定降落區域。
2.3 自主控制技術
通過圖像處理技術得到形心值和旋轉量,并利用相關控制變量公式以及PID控制實現對飛行器左右平移和旋轉的自主控制。
2.4 目標識別與跟蹤技術
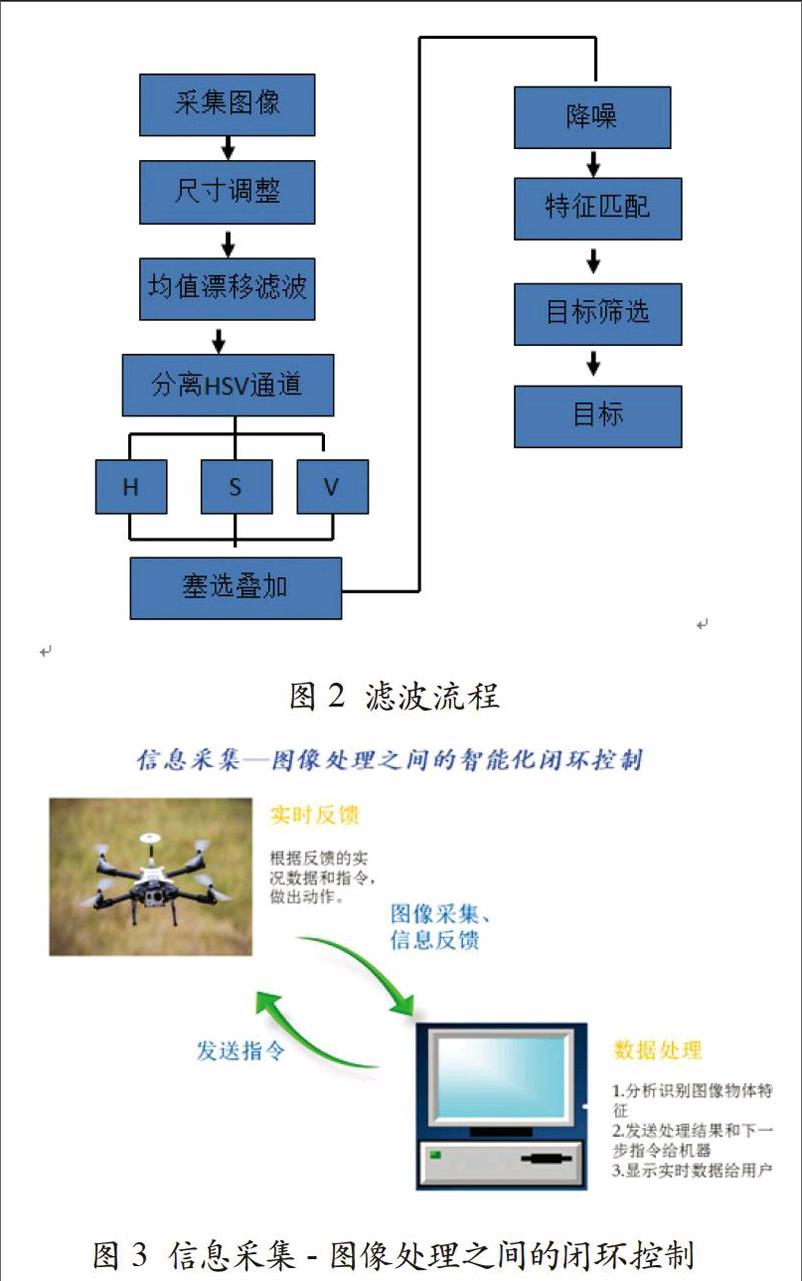
通過飛行器的前置攝像頭采集圖像信息,并對指定目標進行識別,其過程分為采集圖像、反饋到控制端、按每秒12幀接收圖像,并將每幀圖像轉為RGB圖像、分離HSV通道、三通道濾波、轉回RGB圖像,用統計學方法找出形心位置并將形心位置居中、查找輪廓、輪廓篩選、得到目標。跟蹤原理即為先標定目標與飛行器距離,采集圖像,讀取目標在圖像中的大小。當目標移動時,根據相關算法控制飛行器移動從而使目標在圖像中保持大小不變。
2.5 三通道濾波
圖像處理主要采用HSV三通道濾波技術。采用設定顏色模型的方法對目標特征進行設定,使用OpenCV庫的cvCvtColor函數將圖像轉到HSV顏色空間,如:cvCvtColor(rgb,hsv,CV_BGR2HSV),調用cvSplit函數可以將H、S、V分量分離出來,再來單獨訪問各分量,HSV對應的通道分別為0,1,2。濾波流程如圖2所示。信息采集-圖像處理之間的閉環控制如圖3所示。
3 創新點
(1)本作品采用當前熱門的無人機作為搭載平臺進行操作,該作品擁有無人機體積小、隱蔽性強、靈活度高等特點。
(2)本作品采用圖像處理和模塊識別技術而并非傳感器或數據庫來獲取并分析信息。
(3)本作品不僅實現了路線識別功能,還能夠鎖定和跟蹤既定目標。
(4)進行自動控制和人為操控的雙重控制,實現智能操控和自動避障,自主可控,靈活度、實用度更高。
(5)本作品擁有濃厚的軍事化設計背景,特點鮮明,目的突出,具有廣闊的開發和提升空間。
4 市場前景
本作品原設定的作用為目標智能識別與跟蹤。經過二次加工和開發,可應用于軍事目標定位和打擊、災難救援現場的目標搜尋和鎖定、緊急物資的遠程快速運輸、公共場合異常舉動識別、特定目標的跟蹤觀察等領域。也可以將系統從四旋翼無人機平臺移植到其他機器如類人型機器人、機器車、機械臂上,擁有靈活的應用方式和廣泛的使用空間。覆蓋軍事、公益、救援、物流、安保等方面,應用前景廣泛,富有開發和應用潛力。endprint
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
