基于雙目視覺的橋梁檢測無人機兩軸云臺設計與實現(xiàn)
2017-11-30 21:22:12王雨峰
中國新技術新產(chǎn)品 2017年24期
關鍵詞:無人機
王雨峰

摘 要:隨著航拍和遙感技術的發(fā)展,無人機應用技術得到快速發(fā)展,并在眾多領域取得廣泛應用。采用無人機橋梁檢測輔助常規(guī)檢測,可有效提高橋梁檢測效率,并保證檢測數(shù)據(jù)的準確性和持久性。本文針對橋梁檢測的特殊需求,采用雙目視覺技術替代傳統(tǒng)單目測量,提高測量精度;設計兩種新型云臺,實現(xiàn)無人機懸停橋梁底部,垂直向上拍攝的工程需求,并實驗對比兩種云臺的綜合性能。
關鍵詞:雙目視覺;橋梁檢測;無人機;云臺設計
中圖分類號:TP49 文獻標識碼:A
0.引言
橋梁是我國交通重要的基礎建設工程,關乎社會與經(jīng)濟的和諧發(fā)展。橋梁建設的投入巨大,因此保障橋梁安全耐用至關重要。橋梁檢測是橋梁管理的基本工作,常規(guī)的檢測手段主要是依靠肉眼觀察或橋檢車、望遠鏡等輔助工具,對橋梁主要構件進行檢查,以便及時發(fā)現(xiàn)橋梁開裂破損、露筋銹蝕、支座脫空等病害。
隨著航拍技術、遙感技術的不斷發(fā)展,無人機應用技術作為一門新興的綜合性技術,在我國國防建設、地質(zhì)勘測、電網(wǎng)巡視、高速公路巡查、氣象檢測、森林防火、海事巡邏等軍用與民用技術領域獲得廣泛應用,成為提高效率和提升產(chǎn)業(yè)規(guī)模水平發(fā)展的重要工具。無人機根據(jù)其結構分為固定翼、直升機和多旋翼三大類。多旋翼無人機因平穩(wěn)性好、結構簡單及性價比高等優(yōu)勢成為無人機橋梁檢測的首選。采用無人機橋梁檢測,不僅解決了傳統(tǒng)橋梁檢測費錢耗時、難度大、危險系數(shù)高等難題,而且保證了檢測數(shù)據(jù)的準確性和持久性,提高橋梁檢測效率。
橋梁底部由于受力不均、風雨侵蝕,最容易發(fā)生破損開裂的病害,因此橋梁檢測中需要測量破損開裂的面積和裂縫長度寬度等,涉及不規(guī)則形狀的精確計算,且精度需達到0.1mm。除了人工測量外,基于機器視覺的測量技術得到研究與應用。目前無人機搭載單目高清攝像頭,受云臺限制,只能向下或側面拍攝。而實際檢測中,需要無人機懸停于橋梁下方,垂直向上拍攝橋梁底部大面積病害情況,以便做到精確計算。
1.基于雙目視覺技術的橋梁裂縫測量系統(tǒng)
傳統(tǒng)單目拍攝及圖像處理是基于二維平面的計算方法,而攝像頭拍攝的圖像僅僅是真實物體的平面投影,存在較大的誤差。為滿足橋梁檢測中0.1mm的精度要求,基于雙目視覺技術測量系統(tǒng),通過模擬人眼觀察,還原物體的空間真實尺寸,進而有效保證測量的精度。
1.1 雙目視覺技術工作原理
雙目視覺技術是仿照人眼觀察原理、利用兩個攝像頭,從不同角度同時獲取同一目標圖像,通過計算目標在圖像的視差獲取目標的準確三維坐標值。
平行放置的雙目視覺模型是最理想的,如圖1所示。其中,OL、OR分別是左右兩個攝像頭的坐標系原點,又稱光心,ZL、 ZR是光軸;光心之間連線為基線,長度為b;攝像頭成像平面的原點與其光心距離為焦距。理想模式中,兩攝像頭完全相同,焦距為f,光軸平行。由此建立三角幾何對應關系為:
(1)
其中, (xw,yw,zw)為目標P點的坐標。記 d=xl-xr,即為 P點的雙目視差。由此可知,只要得到空間任意點在左右兩個攝像頭成像平面上的圖像坐標、焦距和基線,即可求得目標點的三維空間坐標。
1.2 橋梁裂縫測量系統(tǒng)組成
基于雙目視覺技術的橋梁裂縫測量系統(tǒng)由圖像采集、處理和計算組成,利用兩個CCD相機獲取橋梁底部圖片,運用計算機處理自動識別出裂紋圖像,并對分離出來的裂紋進行計算獲取三維點坐標,從而實現(xiàn)更加精確的計算。相比傳統(tǒng)人工測量,具有更加快捷安全、直觀精確、靈活性高、成本低廉等優(yōu)點,具有較好應用前景。
方案選用CC3D飛控操作QAV250機架的小型無人機,將兩個700線高清攝像頭,以中心距10cm固定在云臺上,攝像頭垂直向上,滿足橋梁底部拍攝要求;搭載兩套5.8G圖傳和RC832接收機同時采集兩個攝像頭拍攝的圖像。雙目相機需經(jīng)過標定才能保證精度,其標定過程就是確定三維空間點到二維平面點的映射矩陣的過程。
所采集圖像需進行預處理,包括圖像壓縮、圖像去噪、圖像增強。經(jīng)過處理后的圖像,可清晰呈現(xiàn)裂縫。通過對同一組圖像中裂紋寬邊或左右像素點進行匹配,可計算空間兩點的三維坐標(X,Y,Z)和(U,V,W) 。進而根據(jù)三維歐氏距離公式:
(2)
計算兩點之間距離。
2.無人機兩軸云臺設計
無人機的安全性、穩(wěn)定性、可操作性是航拍基礎;相機的畫質(zhì)直接影響航拍的作品,兩者缺一不可。由于無人機飛行姿態(tài)變化、自身的震動以及外界氣流擾動都會影響到成像質(zhì)量,又受限于無人機的載重與功耗,因此必須選用重量輕、結構簡單的云臺,以穩(wěn)定視軸、隔離干擾,保證橋梁檢測精度。
2.1 云臺系統(tǒng)總體設計
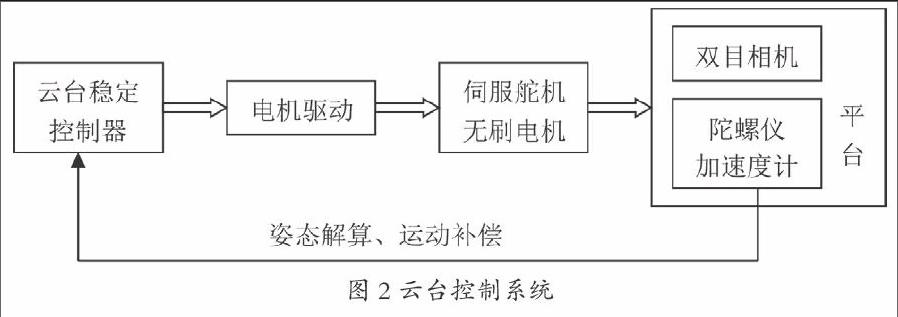
如圖2所示,云臺系統(tǒng)由控制器、姿態(tài)反饋元件、執(zhí)行元件以及框架結構4個部分組成,采用64引腳LQPF封裝的TMS320F28035作為主控芯片,集成有三軸陀螺儀、三軸加速度計的慣性傳感器MPU6050作為姿態(tài)反饋,分別選用伺服舵機和2204無刷電機,與L6234電機驅動器組成執(zhí)行元件。
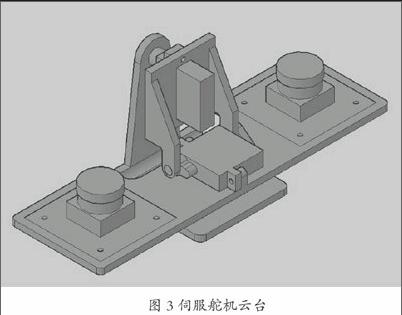
如圖3和圖4所示,根據(jù)橋梁檢測特殊需求,設計了伺服舵機云臺和無刷電機云臺。云臺由俯仰和橫滾兩軸組成,整體重點較低,具有一定自穩(wěn)特性;底座采用減震球與機身相連,減少機身震動對云臺的影響;相機平臺以中心距10cm固定兩個高清攝像頭,同時固連姿態(tài)反饋元件。
2.2 驅動選擇
根據(jù)云臺功能實現(xiàn)需要可選擇伺服舵機、步進電機、直流無刷電機,其中伺服舵機驅動簡單、質(zhì)量輕、體積小、驅動力矩大,是普通云臺的首選;而相同質(zhì)量的進步電機由于力矩太小,較少使用;直流無刷電機隨著技術發(fā)展,體積越來越小,逐漸應用于新型云臺。
舵機由電子控制電路板、空心杯電機、減速齒輪組和旋轉電位計組成,其中空心杯電機具有轉動慣量小的優(yōu)點,即傳動順滑,可保障云臺穩(wěn)定過程中精確控制;而減速器由于齒輪間存在間隙,會造成回差影響穩(wěn)定效果,因此需選用精度較高的減速齒輪。此外可將舵機控制電路隔離,直接連接至云臺控制,以提高控制頻率。endprint
2204無刷電機型號為MY-2813C,其定子直徑22mm,定子厚度4mm,槽數(shù)12,極數(shù)14,重量22g。無刷電機中定子繞組產(chǎn)生的每個磁場矢量與轉子空間位置對應,因此根據(jù)轉子空間位置,控制相應繞組相電流大小和方向,產(chǎn)生磁場矢量,以補償轉子隨機體的運動,從而使其空間位置固定。
2.3 框架結構的3D打印
本文設計的云臺框架結構是目前市面無法購買的,為了實現(xiàn)質(zhì)量輕、結構合理、強度適宜的要求,所以采用3D打印進行定制。3D打印實現(xiàn)周期短、成本低、柔性制造、所見所得和高度集成化等優(yōu)勢,讓三維設計模型直接到樣件的原型產(chǎn)品,大大縮短制造時間和成本。此外,3D打印技術為云臺造型優(yōu)化和尺寸變化、攝像頭及電機的更換提供了無限可能,根據(jù)無人機尺寸和載荷變化,設計更合理的云臺,提高穩(wěn)定性,保證測量精度。
2.4 云臺運動補償控制器
無人機在飛行中不可避免對云臺造成影響,因此需運用運動補償控制器加以補償。
定義機體坐標系 obxbybzb,相機云臺中心坐標系ocxcyczc,兩圖像平面中心坐標系oiyizi。無人機機體角速度 與引起的云臺姿態(tài)角速度 間的關系為:
根據(jù)工程需要,二自由度云臺系統(tǒng)滿足橋梁檢測的要求,可作俯仰和橫滾運動,故當目標相對兩圖像中心位置偏差 時,為了使其處于兩圖像中心位置,云臺應該調(diào)節(jié)的角度:
利用無人機自身的姿態(tài)感應裝置感知機體角速度,設采樣間隔為 Δti,可得云臺控制系統(tǒng)誤差為:
最后把無人機的速度和角速度作為云臺控制器的輸入,引入PID云臺穩(wěn)定控制器。通過 PID 控制算法得到控制量驅動相應軸的電機轉動,隔離載體的角運動,穩(wěn)定云臺,為目標標定和拍攝提供可靠的保證。
3.實驗對比
通過模擬橋梁檢測的飛行實驗,兩種云臺設計方案均能較好地滿足工程需求,從云臺的轉動速度、轉動角度、載重、環(huán)境指標、回差和可靠性等方面進行對比,結果見表1,可知伺服舵機云臺結構強度好、力矩大,適用于大中型無人機,以承載更重的高清相機;而無刷電機云臺結構簡單、無機械回差,適合于小型無人機,搭載微型高清攝像頭。
表1 兩種云臺性能對比
類型 伺服舵機云臺 無刷電機云臺
轉動速度 力矩大,轉動速度快 轉動速度固定,較穩(wěn)定
轉動角度 滿足飛行中調(diào)節(jié)的需要,但受限于相機云臺尺寸和距機身的距離
載重 載重大,受限舵機齒輪連接處 載重小,受限電機螺栓連接處
環(huán)境指標 電機內(nèi)置,可防塵防水 電機外露,需謹防雨霧侵蝕
回差 回差在啟動或停止時較大 無機械回差
可靠性 可靠性良好,均能滿足實驗需要
結語
隨著無人機技術的不斷發(fā)展,基于雙目視覺的無人機橋梁檢測系統(tǒng)提高了測量精度,同時新的云臺設計滿足橋梁底部垂直向上拍攝的需求,通過運動補償保障了云臺平穩(wěn)轉動和圖像采集的清晰。因此,無人機將會越來越多的應用于橋梁檢測,成為未來橋梁管理重要補充手段,極大提高橋梁檢測的效率,維護橋梁結構安全,確保橋梁經(jīng)久耐用。
參考文獻
[1]彭玲麗,黃少旭,張申申,等.淺談無人機在橋梁檢測中的應用與發(fā)展[J].交通科技,2015(6):42-44.
[2]陳顯龍,陳曉龍,趙成,等.無人機在路橋病害檢測中的設計與實現(xiàn)[J].測繪通報,2016(4):79-82.
[3]龐娜,趙啟林,芮挺,等.基于機器視覺的橋梁檢測技術現(xiàn)狀及發(fā)展[J].現(xiàn)代交通技術,2015,12(6):25-31.
[4]劉晶晶.基于雙目立體視覺的三維定位技術研究[D].華中科技大學,2007.
[5]王琳. 基于雙目立體視覺技術的橋梁裂縫測量系統(tǒng)研究[D].上海交通大學,2015.
[6]孟恭.無人機視覺穩(wěn)定云臺系統(tǒng)設計[D].哈爾濱工程大學,2012.
[7]楊潤,閆開印,馬術文.小型無人機機載兩軸云臺設計與實現(xiàn)[J]. 自動化與儀器儀表,2014(7):165-167+171.
[8]吳復堯,邱美玲,王斌.3D打印無人機的研究現(xiàn)狀及問題分析[J]. 飛航導彈,2015 (10):20-25.
[9]羅秋鳳,肖前貴,楊柳慶.無人機自動檢測系統(tǒng)的設計與實現(xiàn)[J]. 儀器儀表學報,2011,32(1):126-131.
[10]李湘清,孫秀霞,彭建亮,等. 基于運動補償?shù)男⌒蜔o人機云臺控制器設計方法[J]. 系統(tǒng)工程與電子技術,2011,33(2):376-379.endprint
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導報(2016年9期)2016-05-26 20:58:26
