未知但有界噪聲條件下的MEMS陀螺信號處理方法
2017-12-01 03:33:17劉潔瑜周小剛
宇航學報 2017年11期
沈 強,劉潔瑜,周小剛,王 琪,趙 乾
(1. 火箭軍工程大學控制工程系,西安710025;2. 火箭軍士官學校,青州262500)
未知但有界噪聲條件下的MEMS陀螺信號處理方法
沈 強1,劉潔瑜1,周小剛1,王 琪1,趙 乾2
(1. 火箭軍工程大學控制工程系,西安710025;2. 火箭軍士官學校,青州262500)
提出了一種基于橢球定界的微機電系統(MEMS)陀螺模型辨識與誤差補償方法。首先,建立了隨機漂移的自回歸模型,并針對模型隨時間變化的特征,引入具有遞推特性的定界橢球自適應約束最小二乘法(BEACON),實現模型參數的動態辨識,提高建模精度;然后,提出一種未知但有界(UBB)噪聲條件下的定界橢球自適應狀態估計(BEASE)算法,用于角速率的估計;采用新的加權策略和優化準則進行量測階段的更新,并推導了此框架下的狀態可行集更新過程及其最優參數求解方法。將該方法應用于MEMS陀螺信號的處理,驗證了其有效性和改進性能。
MEMS陀螺儀;參數辨識;狀態估計;最優定界橢球算法;有界噪聲
0 引 言
隨機漂移是影響微機電系統(Micro-electronic-mechanical system,MEMS)陀螺精度的重要誤差源之一,一般采用時間序列分析對其建模,然后利用Kalman濾波(Kalman filter,KF)及其相關擴展算法對隨機漂移進行估計和補償[1-3]。但是,這些傳統的估計方法通常對噪聲的分布都有嚴格的要求,而在實際應用中,陀螺噪聲的統計特性往往相當復雜,實時變化,甚至可能存在異方差[4]、混沌噪聲[5]等不確定統計特性的噪聲,導致概率分布假設很難得到滿足或統計特性難以確定,造成估計偏差或估計器不穩定。近年來,集員(Set-membership,SM)估計理論及其應用[6-9]逐漸受到重視,該算法僅要求噪聲有界,而對邊界內的噪聲具體分布并無要求,也無需知道其統計特性,可以克服傳統狀態估計方法的缺陷;此外,集員估計可以獲得估計狀態的嚴格不確定邊界約束,提高系統的穩定性和可靠性。
集員估計理論包括多種定界方法,本文主要針對應用最為廣泛、計算過程相對簡單的最優定界橢球 (Optimal bounding ellipsoid,OBE) 算法,以及與其相關的狀態估計問題[10-13]。到目前為止,OBE算法的優化過程主要是采用最小容積和最小跡準則,即通過最小化橢球的容積和跡來求解參數,實際應用中是通過最小化橢球形狀矩陣的行列式和跡來實現的[10]。近年來,區別于傳統優化準則的κt-minimizing準則因其具備良好的收斂性和穩定性而逐漸受到重視,并成為OBE辨識算法中的一個重要分支[14]。受此啟發,文獻[15]將該準則引入狀態估計,提出了一種新的OBE狀態估計算法,仿真結果證明該算法雖然犧牲了一定的實時性,但卻具有良好的快速穩定性和更高的估計精度。文獻[15]為橢球狀態定界算法提供了一種新的思路,但其跟蹤能力具有一定的缺陷。
本文在這種思路的基礎上,將具有良好收斂性能和動態跟蹤性能的定界橢球自適應約束最小二乘(Bounding ellipsoidal adaptive constrained least-squares,BEACON)辨識算法[16]引入狀態估計中,設計了一種新的橢球狀態定界算法,即定界橢球自適應狀態估計(Bounding ellipsoidal adaptive state estimation,BEASE)算法。將BEACON算法和BEASE算法用于MEMS陀螺信號的處理,有效提高了其使用精度。
1 隨機漂移信號的動態建模
本文將MEMS陀螺的隨機誤差看作一個隨機過程,采用基于時間序列分析的方法建立其模型,通過對靜態數據進行平穩性檢驗和FPE(Final prediction error)定階準則分析,確定選用AR(3)模型作為MEMS陀螺隨機誤差的模型結構:
(1)
式中:yk陀螺漂移序列,ai為模型參數,wk為均值為零的可加測量噪聲。將其轉換為廣義回歸模型的形式:
(2)
式中:θ=[a1,a2,a3]T,Φ=[-yk-1,-yk-2,-yk-3]T。通常情況下,wk假設為零均值標準差為已知量的白噪聲。但是實際應用中,白噪聲的假設并不總能得到滿足,甚至難以準確判斷噪聲的分布特性;而噪聲的邊界相對容易獲取,通過觀測數據即可得到。因此,本文僅假設wk是有界的,滿足:
(3)
同時,假設待辨識的參數初值屬于橢球:
(4)
集員辨識的目標是得到與條件相匹配的參數可行集,由于可行集十分復雜,難以精確確定,往往需要用相對簡潔的結構來近似該可行集。而橢球定界方法則是利用外包橢球來逼近參數可行集,包含參數可行集的橢球可通過如下過程遞推得到[16]
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
2 定界橢球自適應狀態估計(BEASE)算法
就陀螺輸出信號而言,觀測方程(10)中任意時刻的觀測量和量測噪聲均為標量,這屬于線性系統的特殊情況。為保證本文算法具有廣泛適應性,首先考慮一般的線性離散系統
xk=Fk-1xk-1+Gk-1wk-1
(14)
zk=Hkxk+vk
(15)
式中:xk∈Rn和zk∈Rm,wk∈Rl,vk∈Rm,矩陣Fk、Gk-1、Hk的維數均由狀態、觀測向量及噪聲的維數所確定。兩種噪聲屬于如下的橢球集合
(16)
(17)
式中:Qk和Rk為已知的正定矩陣。
初始狀態屬于下式所描述的橢球
(18)
因此,本文算法可以應用于一般的線性時變系統。取n=4,m=1,l=4,并按照式(9)~(13)將相對應的參數代入,即可用于陀螺角速率信號的估計。
與集員辨識類似,集員狀態估計的目標是得到狀態的可行集,不同之處在于狀態估計的每次迭代包括時間更新和狀態更新兩個過程。包含k-1時刻狀態xk-1的橢球可以描述為
(19)
2.1時間更新

(20)
(21)
式(19)和式(21)可變換為
(22)
(23)
根據文獻[7]附錄A中兩個橢球Minkowski 和的表示方法,再進行一些變量的代換,可以得到
(24)
(25)
取σk|k-1=σk-1,即可得到橢球形狀矩陣:
(26)

(27)
2.2量測更新
根據式(15)和式(17),xk屬于如下的橢球
(28)
(29)
由式(29)可以進一步得到:Sk中的元素滿足
(30)

(31)
根據式(29),可以取
(32)
(33)
(34)
(35)
(36)
將式(36)代入式(32),可以得到橢球中心
(37)

將式(34)作為qk的函數,為了描述方便,將其表示為f(qk),則對參數qk的最優化可以描述為
(38)
(39)
通過微分法易知,f″(qk)≥0,所以對任意qk≥0,f′(qk)是qk的單調遞增函數。
(40)
3 試驗分析
為驗證BEASE算法對MEMS陀螺漂移信號處理的有效性,以ADI公司生產的ADXRS300陀螺作為研究對象,進行數據的處理。試驗過程中將陀螺置于安裝在隔離地基上的溫控轉臺上,轉臺精度完全能夠滿足MEMS陀螺測試的要求。首先將陀螺上電預熱10分鐘,然后以50 Hz的采樣頻率連續采樣4 h,數據長度為720000。為提高建模精度,時間序列誤差模型作為線性時變系統處理,且采用的參數辨識方法是實時遞推的,所以進行數據處理時參數辨識和狀態估計可同步進行。AR(3)模型參數的辨識結果如圖1所示,可以看出,辨識方法能夠有效跟蹤的模型參數的變化。

試驗中將本文提出的算法與KF以及文獻[15]中的ES-SME算法進行比較,ES-SME算法與本文所提的算法采用的是相同的參數優化準則,不同之處在于量測更新加權策略不同,因而具有不同的更新過程和參數優化方法。各種方法的信號處理結果如圖2所示,為了表達的清晰,本文同時給出了其中200 s的信號處理結果,見圖3。
經過計算,MEMS陀螺原始信號的均方根誤差(RMSE)為0.3999°/s,而采用ES-SME算法、KF以及本文所提出的BEASE算法處理之后,信號的RMSE分別降為0.1299°/s,0.0620°/s和0.0451°/s。因此,從RMSE的角度來看,上述方法均能明顯的提高MEMS陀螺的精度。但是,基于BEASE算法的信號處理效果要優于ES-SME算法和KF,其誤差的減小是ES-SME算法和KF的2.88倍和1.37倍。值得注意的是,同樣是橢球定界算法,這里ES-SME算法表現相對較弱,甚至沒有充分發揮其作用,這主要是由于本實驗中信號的噪聲波動較大,而ES-SME算法的跟蹤性能不足導致的。
為進一步比較算法性能,本文對原始信號以及用各種算法處理后的信號進行了Allan方差分析,分析結果如圖4所示。用Allan方差對信號處理前后的漂移系數進行辨識,得到角度隨機游走(Angular random walk,ARW)和零偏不穩定性(Bias instability,BI),如表1所示。
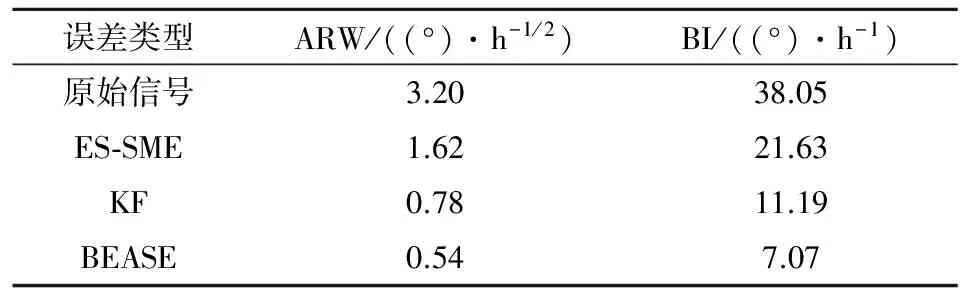
表1 陀螺隨機漂移系數Table 1 The random drift coefficient of the gyroscope
根據Allan方差分析的結果,采用三種方法對MEMS陀螺信號進行處理之后,角度隨機游走和零偏不穩定性都得到了明顯的降低,且依然是BEASE算法的效果最好,這也進一步驗證了本文之前得出的結論。
為驗證算法在動態條件下對MEMS陀螺漂移信號處理的有效性,進行了陀螺的動態實驗。將陀螺置于溫控轉臺上,將陀螺上電預熱10分鐘,然后設置轉臺的參數使陀螺繞敏感軸做搖擺運動,其輸入角速率為ω=10πsin(0.1πt)°/s。然后按照靜態試驗的過程采集200 s的數據并進行處理,處理結果如圖5所示。
從圖5可以看出,動態條件下,試驗中的三種方法均有效提高了MEMS陀螺的精度。經過計算,動態試驗中陀螺輸出信號的RMSE為0.7555°/s。采用ES-SME算法、KF以及BEASE算法處理之后,信號的RMSE分別降為0.5670°/s,0.5018°/s和0.4513°/s。可見動態條件下采用BEASE算法處理MEMS陀螺信號的效果依然優于ES-SME算法和KF。
需要進一步指出的是,本文所有的數據處理均運行在Intel Core i5 3.2GHz,4G RAM PC機上的Matlab 8.3環境下。試驗表明,KF、ES-SME算法和BEASE算法的每信號運行時間分別為0.021 ms,0.074 ms和0.14 ms。可見,提高估計精度的同時,本文所提算法的實時性有所降低,這主要是因為算法更新過程中需要求解非線性方程導致的。但每信號0.14 ms的處理速度完全可以滿足大部分實際應用的需求,而且可以通過尋求次優算法,可以在很大程度上進一步提高運算效率,這將是下一步研究的重點。
4 結 論
為提高MEMS陀螺的精度,本文假設陀螺噪聲未知但有界,并以OBE算法為基礎,提出了一種新的集員狀態估計方法:在時間更新中,本文利用最小跡準則來優化更新過程;而在量測更新階段,采用了新的加權策略,使狀態估計算法跟蹤性能進一步增強;并在此基礎上推導出了狀態估計可行集的形式,參數優化過程以及算法的具體步驟。同時,通過采用具有遞推性質BEACON算法進行模型參數的辨識,實現了隨機漂移信號的在線動態建模。試驗結果表明,與現有的其他方法相比,本文所提出的方法精度高、跟蹤性能好,具有明顯的優勢,將其用于MEMS陀螺信號的處理,可以有效提高其使用精度。
[1] Kim D, M’Closkey R T. Spectral analysis of vibratory gyro noise [J]. IEEE Sensors Journal, 2013, 13(11): 4361-4374.
[2] 徐定杰, 苗志勇, 沈鋒, 等. MEMS陀螺隨機漂移誤差系數的動態提取[J]. 宇航學報, 2015, 36(2): 217-223. [Xu Ding-jie, Miao Zhi-yong, Shen Feng, et al. Dynamic extraction MEMS gyro random error coefficients[J]. Journal of Astronautics, 2015, 36(2): 217-223.]
[3] Chen W, Li X, Zhang W G. Gross errors identification and correction of in-vehicle M EM S gyroscope based on time series analysis [J]. Journal of Southeast University (English Edition), 2013, 29( 2) :170-174.
[4] 姜宇, 金晶, 張迎春. 基于異方差分析的多MEMS陀螺隨機誤差補償方法[J]. 宇航學報, 2012, 33(6): 776-780. [Jiang Yu, Jin Jing, Zhang Ying-chun. Compensation method for random error signals of multiple MEMS gyroscopes based on Heteroscedasticity analysis [J]. Journal of Astronautics, 2012, 33(6): 776-780.]
[5] 吉訓生, 王壽榮. 硅微陀螺漂移混沌特性分析及預測[J]. 中北大學學報(自然科學版), 2011, 32(5): 567-573. [Ji Xun-sheng, Wang Shou-rong. Chaotic analysis and prediction for random drift of silicon micro-machined Gyroscope [J]. Journal of North University of China(Natural Science Edition), 2011, 32(5): 567-573.]
[6] Cerone V, Lasserre J B, Piga D, et al. A unified framework for solving a general class of conditional and robust set-membership estimation problems [J]. IEEE Transactions on Automatic Control, 2014, 59(11): 2897-2909.
[7] Yu W, Zamora E, Soria A. Ellipsoid SLAM: a novel set membership method for simultaneous localization and mapping [J]. Autonomous Robots, 2016, 40(1): 125-137.
[8] Mao W L. Robust set-membership filtering techniques on GPS sensor jamming mitigation [J]. IEEE Sensors Journal, 2017, 17(6): 1810-1818.
[9] Le Bars F, Sliwka J, Jaulin L, et al. Set-membership state estimation with fleeting data [J]. Automatica, 2012, 48(2): 381-387.
[10] Maksarov D G, Norton J P. State bounding with ellipsoidal set description of uncertainty [J]. International Journal Control, 1996, 65(5): 847-866.
[11] Zhou B, Han J D, Liu G J. A UD factorization-based nonlinear adaptive set-membership filter for ellipsoidal estimation [J]. International Journal of Robust and Nonlinear Control, 2008, 18:1513-1531.
[12] 宋大雷, 吳沖, 齊俊桐, 等. 基于MIT規則的自適應擴展集員估計方法[J]. 自動化學報, 2012, 38(11):1847-1860. [Song Da-lei, Wu Chong, Qi Jun-tong, et al. A MIT-based nonlinear adaptive set-membership filter ellipsoidal estimation [J]. Acta Automatica Sinica, 2012, 38(11):1847-1860.]
[13] Qiu H Y, Wang H, Zhao L. Ellipsoid bounding estimation for kinematic geodetic positioning [J]. Measurement, 2016, 94:201-212.
[14] Deller J R, Gollamudi S, Nagaraj S, et al. Convergence analysis of the quasi-OBE algorithm and related performance issues [J]. International Journal Adaptive Control and Signal Processing, 2007, 21(6): 499-527.
[15] Liu Y S, Zhao Y, Wu F L. Ellipsoidal state-bounding-based set-membership estimation for linear system with unknown-but-bounded disturbances [J]. IET Control Theory and Applications, 2016, 10(4): 431-442.
[16] Nagaraj S, Gollamudi S, Kapoor S, Huang Y F. BEACON: an adaptive set-membership filtering technique with sparse updates [J]. IEEE Transactions on Signal Processing 1999, 47(11):2928-2941.
SignalProcessingTechniqueforMEMSGyroscopewithUnknownbutBoundedNoise
SHEN Qiang1, LIU Jie-yu1, ZHOU Xiao-gang1, WANG Qi1, ZHAO Qian2
(1. Department of Control Engineering, Rocket Force University of Engineering, Xi’an 710025, China;2. Rocket Force Sergeant School, Qingzhou 262500, China)
A novel model identification and error compensation technique for micro-electronic-mechanical system (MEMS) gyroscope based on ellipsoidal bounding algorithm is proposed. Firstly, an autoregressive model for stochastic drift is established. For the time-varying characteristics of the MEMS gyroscope error model, a real-time recursive method called bounding ellipsoidal adaptive constrained least-squares (BEACON) algorithm is adopted to realize the dynamic parameter identification and improve the modeling accuracy. Then, a bounding ellipsoidal adaptive state estimation (BEASE) algorithm with unknown but bounded (UBB) disturbances is proposed to estimate the regular rate. The new weighting strategy and optimization criterion are used at observation updating stage. The updating process of the feasible state set and the selection method of the optimal parameters are reduced under this framework. The method is applied to process the MEMS gyroscope signals and the experiment results to verify the efficiency and improved performance of the proposed method.
MEMS gyroscope; Parameter identification; State estimation; Optimal bounding ellipsoid algorithm; Bounded noise
V241.6
A
1000-1328(2017)11- 1219- 07
10.3873/j.issn.1000- 1328.2017.11.011
2017- 06- 29;
2017- 09- 18
國家自熱科學基金(61503390, 61503392)
沈強(1989-),男,博士生,主要從事MEMS慣性器件、慣性導航、集員估計理論、多源信息融合等方向研究。
通信地址:陜西省西安市灞橋區同心路2號(710025)
電話:17709212360
E-mail:shenq110@163.com
劉潔瑜(1970-),女,博士,教授,主要從事慣性器件、慣性導航技術等方向的研究。本文通信作者。
通信地址:陜西省西安市灞橋區同心路2號(710025)
電話:18292017948
E-mail: liujieyu128@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
