配電網物理仿真系統柔性故障發生裝置
2017-12-06 11:27:22林奧林郭謀發黃建業
電氣技術 2017年11期
林奧林 郭謀發 高 偉 黃建業
(1. 福州大學電氣工程與自動化學院,福州 350108;2. 國網福建省電力有限公司電力科學研究院,福州 350007)
配電網物理仿真系統柔性故障發生裝置
林奧林1郭謀發1高 偉1黃建業2
(1. 福州大學電氣工程與自動化學院,福州 350108;2. 國網福建省電力有限公司電力科學研究院,福州 350007)
為解決配電網物理仿真系統故障發生裝置存在機械觸頭彈跳和故障初相角不可控的不足,本文提出了基于柔性控制的故障發生裝置設計思路。該裝置經過零比較器檢測物理仿真系統線電壓相角,通過控制晶閘管開通時刻實現故障初相角的精確控制。利用晶閘管微秒級導通速度以及良好的動態性能,改善裝置故障初相角控制精度并提高其模擬故障與實際故障的暫態擬合效果。配電網物理仿真系統的實物驗證結果與PSCAD/EMTDC的等效仿真分析表明,該裝置能夠較好地保留故障發生過程的暫態特性,且具備較高的初相角控制精度。
配電網;物理仿真;柔性控制;故障發生;故障初相角
配電網物理仿真系統是根據相似性原理建立的等效仿真模型,能夠反映配電網在故障時真實的物理特性[1-2]。故障模擬實驗可采集并分析配電網故障時的暫態信號,有助于認識配電網故障暫態特性,故障發生裝置是該實驗的主要設備之一。
傳統配電網物理仿真系統的故障發生裝置一般采用接觸器或者斷路器作為動作開關用于故障生成。常見機械開關動作離散時間為1ms左右,對應于50Hz交流電壓角度誤差約為18°,不能實現故障初相角的精確控制[3]。此外,接觸器和斷路器均屬于機械開關,合閘過程難免產生觸頭彈跳引起較大的尖峰電流[4],特別在模擬單相接地故障時,故障電流較小,尖峰電流對暫態特性的影響更加明顯,無法真實地再現故障波形的暫態過程。
對于中性點非有效接地的配電網而言,發生單相接地故障瞬間,流過故障點短路電流的幅值和頻率主要由暫態電容電流決定。故障發生在相電壓過零(? =0)時,暫態電容電流最小。而故障發生在相電壓峰值(? =π/2)時,暫態電容電流最大[5-7]。由以上分析可知,不同故障初相角對應不同暫態波形,為更好地對接地短路故障進行研究,要求設計的故障發生裝置具備故障初相角可控的功能,故需要進一步提高動作開關的時間控制精度[8-9]。
本文提出一套基于晶閘管的柔性故障發生裝置的設計思路,使用電力電子器件作為動作開關,將動作離散時間降低到微秒級,從而實現故障初相角的準確控制。同時晶閘管動態特性良好,導通過程無機械開關觸頭彈跳現象所引起的尖峰電流[10-11],提高模擬故障暫態過程與實際故障暫態過程相似度。
研究柔性故障發生裝置的硬件實現及其控制策略,在已搭建的配電網物理仿真系統中進行故障生成實驗。對物理仿真與PSCAD/EMTDC軟件仿真結果進行比較分析,驗證該裝置能較好地模擬短路故障的暫態過程。
1 系統設計
柔性故障發生裝置適用于1kV以下電壓等級配電網物理仿真系統,其控制模塊及基本結構如圖 1所示。接入方式為串聯或并聯于一次側的母線或者線路單元中。
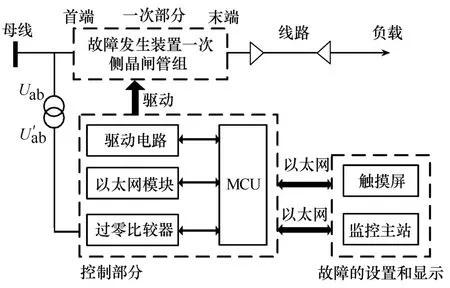
圖1 系統框圖
裝置一次側晶閘管組拓撲如圖 2所示。SCRx代表晶閘管,正常工作狀態為SCR1至SCR3閉合,SCR4至SCR11斷開。通過控制晶閘管的驅動信號模擬母線或線路各類故障的發生,主要包括單相接地、兩相短路、三相短路、斷線等。同時在接地點前設置拉弧裝置,模擬弧光接地故障的發生。
2 硬件設計
2.1 主電路設計
柔性故障發生裝置主要由MCU、電壓過零比較器、驅動電路、雙向晶閘管及拉弧裝置組成。
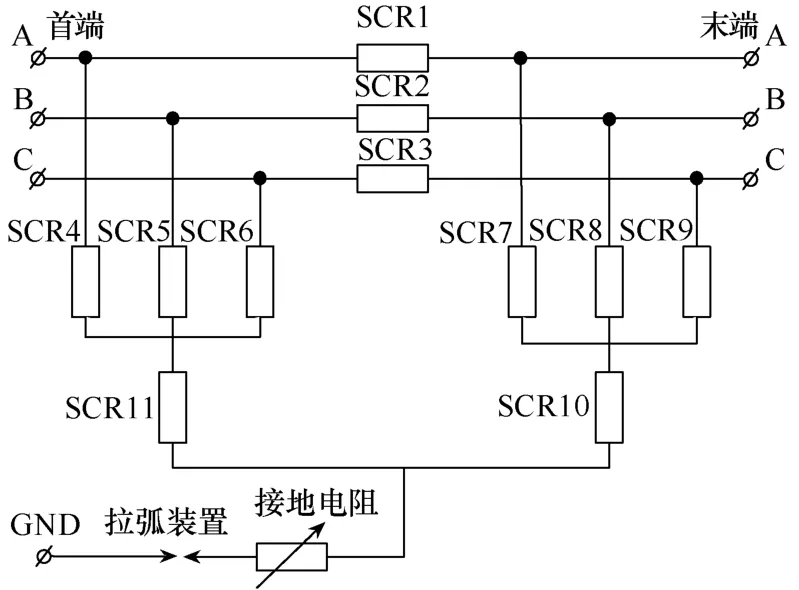
圖2 柔性故障發生裝置一次側晶閘管組拓撲圖
該裝置通過以太網模塊接收故障實驗指令,根據通信協議對命令進行解析,獲取故障類型和故障初相角。解析故障命令完成后,開啟 MCU引腳的外部中斷,經過零比較器檢測電壓零相角時刻,考慮其濾波電路的相角滯后因素,引入一定量的時間修正,并將特定的故障初相角換算為定時器裝載值。計時完成后發驅動信號,控制相應的雙向晶閘管導通,實現柔性故障生成。
故障發生裝置作為故障的控制器件,要求控制開關即雙向晶閘管在故障電流下能夠穩定工作,則晶閘管參數選擇尤為重要,雙向晶閘管通常用在交流回路,其額定電流不同于一般電力電子器件通常以有效值表示。晶閘管通流能力越大其成本越高,為節約成本,三相短路及兩相短路僅在首端進行,而末端SCR7至SCR9配合SCR1至SCR3實現首端斷線末端接地的故障類型,模擬實際配電網架空線路斷線后末端垂入大地的情況。
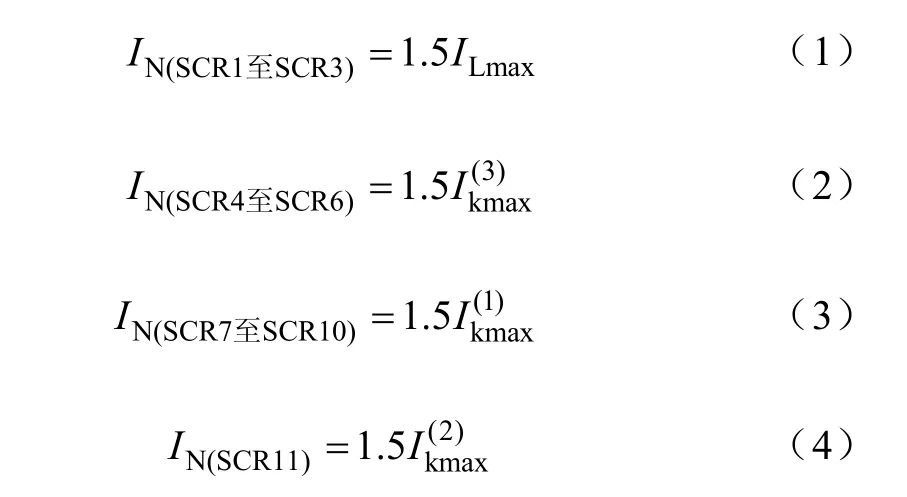
根據配電網物理仿真系統的模型計算,得到系統最大三相短路電流,兩相接地最大短路電流,單相接地最大短路電流,最大負荷電流,為了提高故障發生裝置的運行穩定性,選擇晶閘管參數時考慮一定的裕量,可參考如下:
2.2 控制開關選擇
常用的電力電子器件主要包括晶閘管、電力場效應晶體管(電力MOSFET)和絕緣柵雙極晶體管(IGBT)。電力場效應晶體管控制簡單、體積小,但存在通流能力較弱的缺點。通過對配電網物理仿真系統的參數計算,為了能實現母線三相短路,要求所選擇電力電子開關最大過載電流超過500A,常用的MOSFET管很難達到要求。由于IGBT寄生反向二極管的存在,導致其反向導通不可控,故交流回路控制時一般不做考慮。
排除以上兩種電力電子開關,雙向晶閘管是反并聯晶閘管的集成,具有耐壓高、通流能力強、結構簡單等優點,雙向晶閘管相比于反并聯晶閘管而言驅動電路簡化。其動態特性良好以及微秒級響應時間誤差,能夠精確的控制故障初相角替代斷路器或接觸器作為故障發生裝置的動作開關[12-14]。
2.3 驅動電路
研究發現,接地故障后在系統中故障電流將會產生1~3kHz頻率的振蕩,對于傳統脈沖驅動晶閘管的方式來說,高頻的振蕩波形會使晶閘管導通后在電流過零點處迅速關斷,不能模擬持續一段時間的短路故障。本文采用持續在晶閘管基極注入恒定驅動電流的方式保持晶閘管的導通,達到維持故障狀態的目的。
驅動電路拓撲如圖3所示,雙向晶閘管開關工作狀態取決于驅動信號。模擬短路故障時,系統對雙向晶閘管導通延時、開通陽極電流上升率的要求較為苛刻,必須提供合適的驅動信號。TIP122為達靈頓結構具有很高的放大系數,保證驅動信號的陡度,較高的驅動信號陡度可以有效加快晶閘管導通過程,提高相角控制精度。
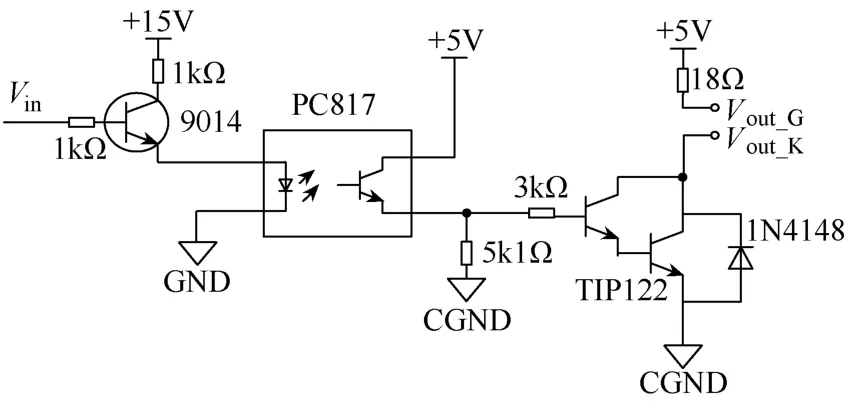
圖3 驅動電路
2.4 電壓過零比較器
電壓過零比較器電路拓撲如圖4所示,采集物理仿真系統線電壓通過電壓互感器降壓,輸入運算發大器構成的過零比較電路,輸出側由光耦隔離接入MCU。經過互感器與光耦的兩級隔離,保護單片機引腳不受高壓側電磁干擾,保證其對邏輯電平的準確判斷。雖然低通濾波電路能夠有效過濾采樣波形中高次諧波,但不可避免地引入了滯后因素。根據低通濾波器的相頻特性公式:

式中,ωc=1/RC。
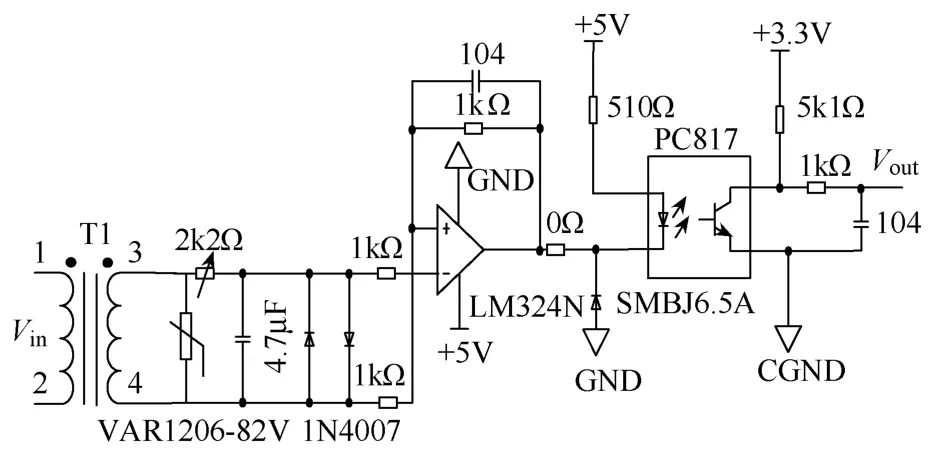
圖4 電壓過零比較電路
已知濾波器參數及式(5)可得滯后相角,控制驅動信號實現特定初相角故障時需要考慮該延時時間。
2.5 拉弧裝置
拉弧裝置以 MCU控制伺服電動機帶動兩個極板實現尖端放電。由于采用脈沖控制,可以精確調節極板位移。如圖5所示,高清攝像頭用于捕捉放電圖像,對放電過程進行全方位、多角度記錄。
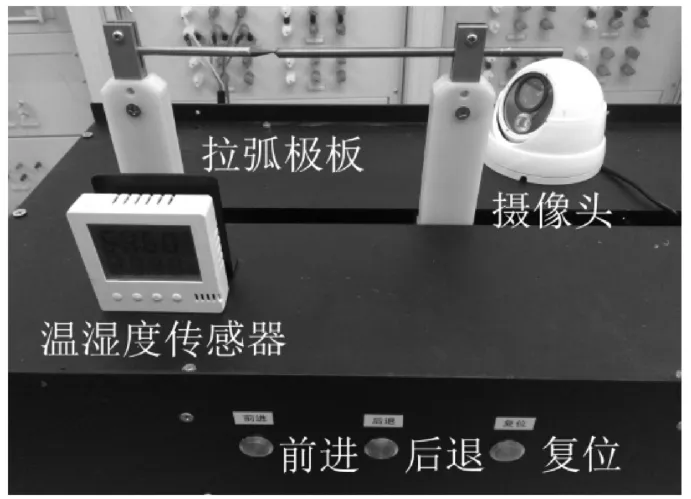
圖5 拉弧裝置
3 控制策略
3.1 軟件流程
裝置軟件流程如圖6所示,主要由SPI通信控制程序、上位機指令解析程序、電壓相角讀取及故障初相角控制程序三部分組成。
首先對以太網模塊和定時器模塊初始化。初始化完成后,將以太網模塊的地址和端口綁定,同時設置為監聽模式,監聽上位機的連接請求。在上位機連接上故障模塊后,對接收數據校驗并分析命令碼,從控制指令中提取故障類型與故障初相角。通過電壓過零比較器采集的電壓信號求得電壓相角,計算延時時間并控制內部定時器精確發出驅動信號,達到控制故障初相角的目的。同時通過不同的命令碼,實現接地電阻控制以及故障時間設置。
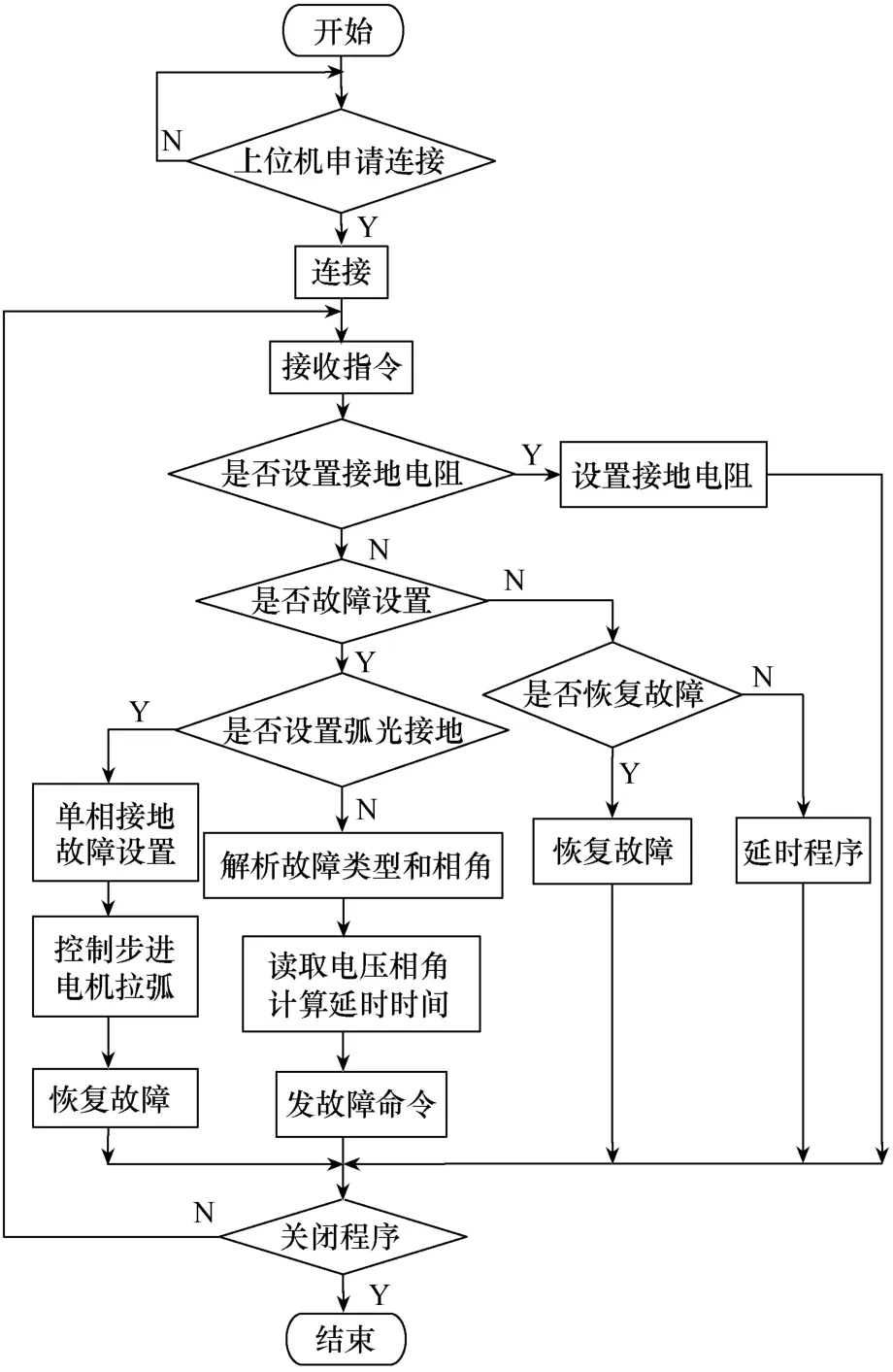
圖6 裝置軟件流程圖
3.2 故障發生的相角的控制算法
物理仿真系統線電壓通過電壓互感器降壓后經過零比較器,將輸入正弦波轉化為方波。其輸出接入 MCU單片機外部中斷引腳,通過上升沿時刻即可確定電壓過零點時間。采樣電路在實際系統中不可避免地存在相角滯后現象,針對以下幾個可能引起相角滯后現象的典型情況進行分析:
計算年回淤量時,模型通過計算一個全潮過程(小潮-大潮-小潮)的回淤量,再根據一年的全潮過程數得到一年的回淤量。
1)Uab線電壓超前 Ua相電壓 30°,則引入固定滯后相角θγ=30°。
2)過零比較器前端低通濾波電路產生的滯后相角θ?,由上述式(5)可得。
3)過零比較器中光電耦合器產生的滯后相角θε。
4)MCU內部時鐘、計算的舍入誤差以及其他因素引入的滯后相角θζ。
由于θε與θζ的滯后相角極低,因此可以認為其對相角控制系統不產生影響。常規低通濾波電路相角滯后θ?>60°甚至更高,因此主要的相角差來自θ?。考慮到 MCU不能預知上升沿來臨時刻,不能提前發出驅動指令,該種相角滯后現象使得故障初相角在 0~(θ?-θγ)之間不可控,即存在相角控制死區,不滿足實驗需求。裝置通過控制過零比較器上升沿中斷時刻的下一個電壓周期內對應初相角故障的方式,避免相角滯后所帶來的控制死區現象。設故障初相角為θα,如圖 7所示。按照以下幾個步驟確定不同相角要求下定時器的裝載值 L(晶振頻率為 fosc):
1)50Hz工頻信號,單位相角對應延時時間為

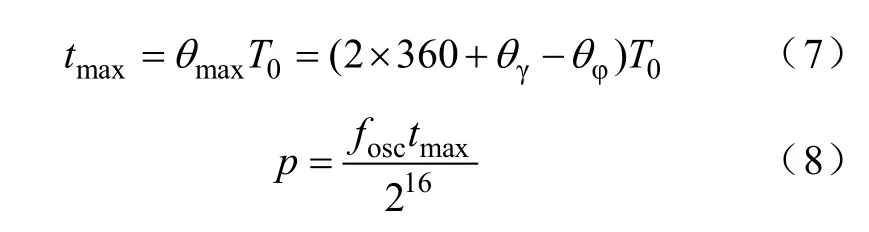
3)計算延時觸發角度為

4)θβ換算成MCU計數器裝載值為

結合上述計算,在 MCU進入上升沿中斷后起動定時器,其預分頻比設為 p,根據上位機設置故障初相角,計算定時器裝載值 L,通過高精度的定時器準確控制驅動信號。
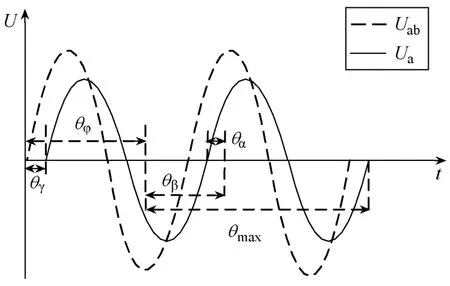
圖7 滯后相角與故障初相角關系示意圖
4 軟件仿真與物理仿真驗證
為驗證提出的配電網故障發生柔性控制的可行性,搭建配電網物理仿真系統,拓撲結構如圖8所示。根據相似性原理,構建 0.4kV系統模擬 10kV系統的配電網模型。主變參數通過標幺值等效方法將原型S(F)11系列的110kV/10kV,20MVA三相電力變壓器等效為0.4kV/0.4kV,30kVA變壓器。線路模型采用π形等值方式,物理參數見表1,其阻抗與10kV實際線路阻抗相同,即阻抗模擬比為1。主變T為Y0/Δ-11接線,變壓器中性點自Z型變引出可選擇不接地、經消弧線圈過補償接地或經高阻接地。
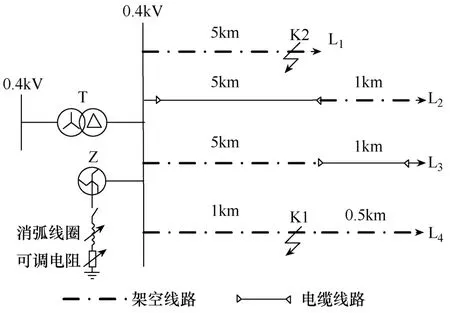
圖8 配電網物理仿真系統拓撲圖
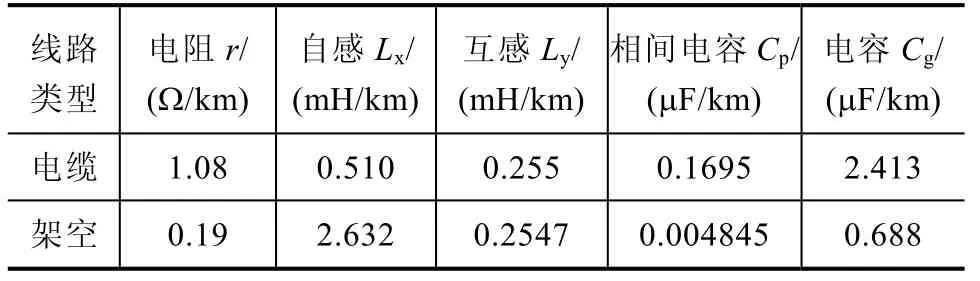
表1 線路物理參數
4.1 相角誤差
相角控制精度是實現精確柔性故障發生的關鍵,實際故障初相角計算方法如圖9所示。結合物理仿真故障錄波結果,為排除系統噪聲影響,通過觀察實驗數據以A相電壓超過其峰值電壓的4%記為相角0°,同時以零序電壓超過其峰值電壓的4%記為故障發生時刻,計算實際故障初相角的近似值θδ。設裝置目標故障初相角為θs,則相角控制誤差為|θδ-θs|。
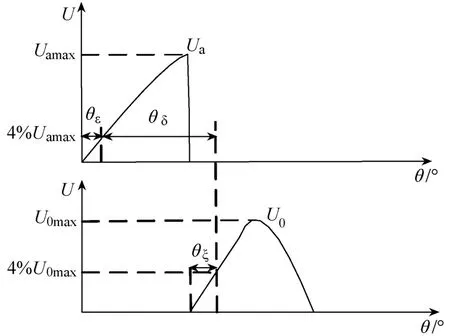
圖9 實際故障初相角計算方法示意圖
以 K1故障點發生不同故障初相角下的單相金屬性接地故障為例,計算目標故障初相角與實際故障初相角的誤差考察相角控制精度。目標故障初相角從0~180°,每隔15°為一組,均分為13組。每組進行10次實驗,通過上述方法計算實際故障初相角并取平均值,其結果與誤差見表 2。誤差主要由實際故障初相角計算方法誤差(|θε-θζ|)與裝置本身的控制誤差兩部分組成。實驗結果表明,其相角控制最大誤差為5.4°,即該控制策略能夠較為精確地控制故障初相角。
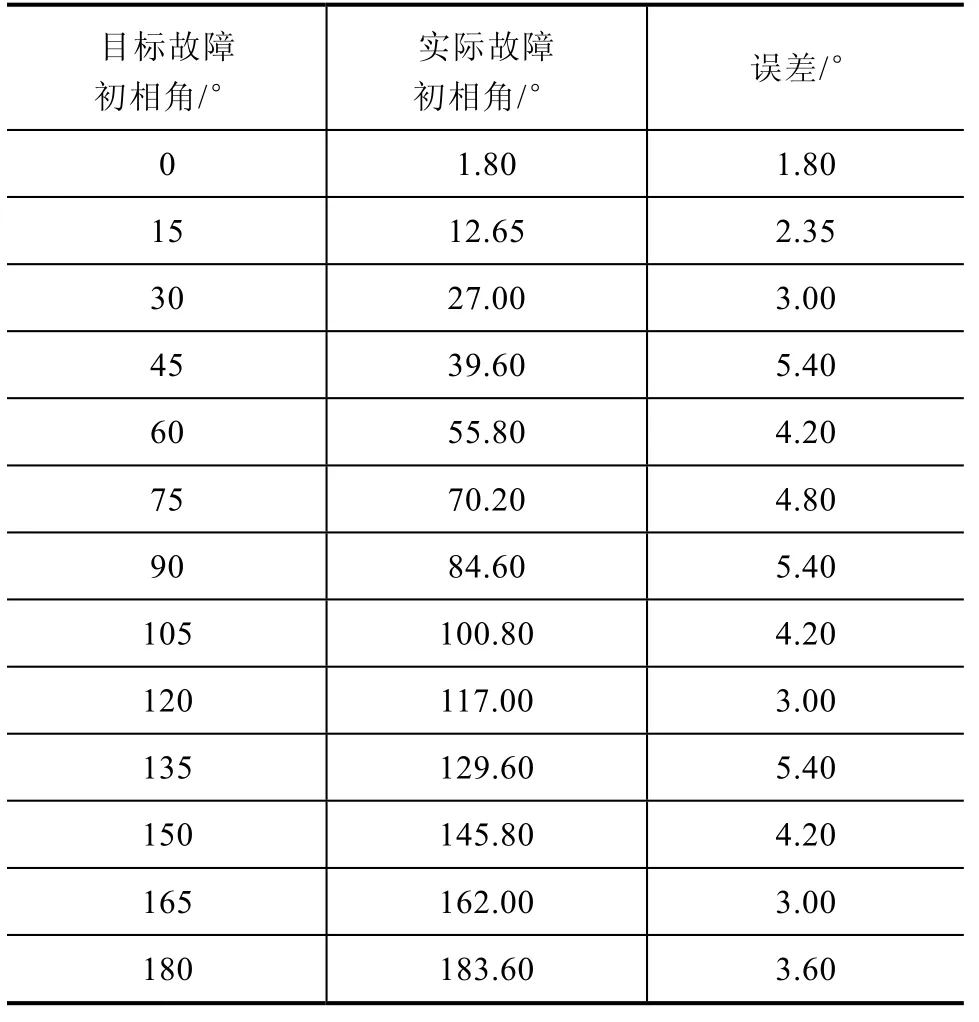
表2 實際故障初相角測量結果及誤差
4.2 故障實驗
故障發生柔性控制思路的可行性需通過物理仿真與軟件仿真對比進一步驗證。搭建 PSCAD/EMTDC等效仿真模型,其參數與圖 8物理仿真系統一致。
弧光接地實驗仿真結果對比如圖10所示,為系統中性點經高阻接地,故障點 K1弧光接地的實驗仿真波形。仿真電弧模型采用控制論模型,電弧電導G的表達式為

式中,C 為常數,取 5×10-5;時間常數τ =β ×Ic/Lc,峰值電流Ic取14kA,弧長Lc取150cm,系數β 取經驗值2.85×10-5;弧柱穩態場強vp取經驗值15V/cm。
弧光接地故障電弧電流及電壓波形均發生不同程度的畸變。圖 10(a)中電弧電流波形,每個工頻周期下存在2次明顯的“零休”現象。同時,圖10(b)中電弧電壓在電流“零休”期間急劇變化,呈現馬鞍形,并具有明顯的燃弧電壓和熄弧電壓。對比仿真結果,模擬弧光接地實驗波形與控制論模型下電弧的特征一致,基本滿足實際電弧特性[15-19]。
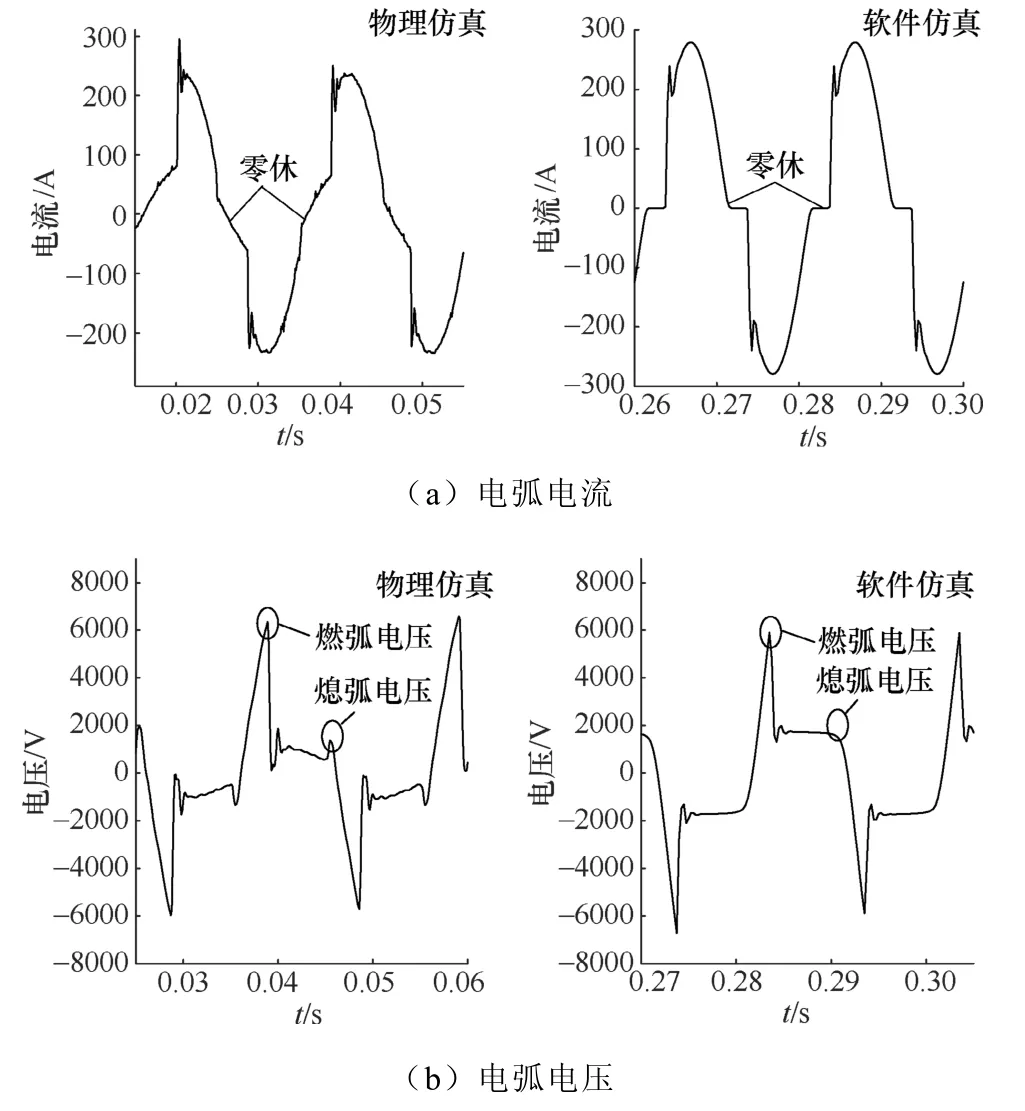
圖10 弧光接地仿真驗證波形
中性點不接地,K2故障點進行不同相角的單相金屬性接地故障實驗如圖11與圖12所示。當故障相在電壓零值(? =0)接地時,暫態電容電流的自由分量達到最小值。反之,故障相在電壓峰值(? =π/2)接地時,暫態電容電流的自由振蕩分量將有最大值,高頻振蕩現象最為明顯。其生成故障暫態現象和仿真結果基本一致,可以很好地模擬故障的暫態過程。
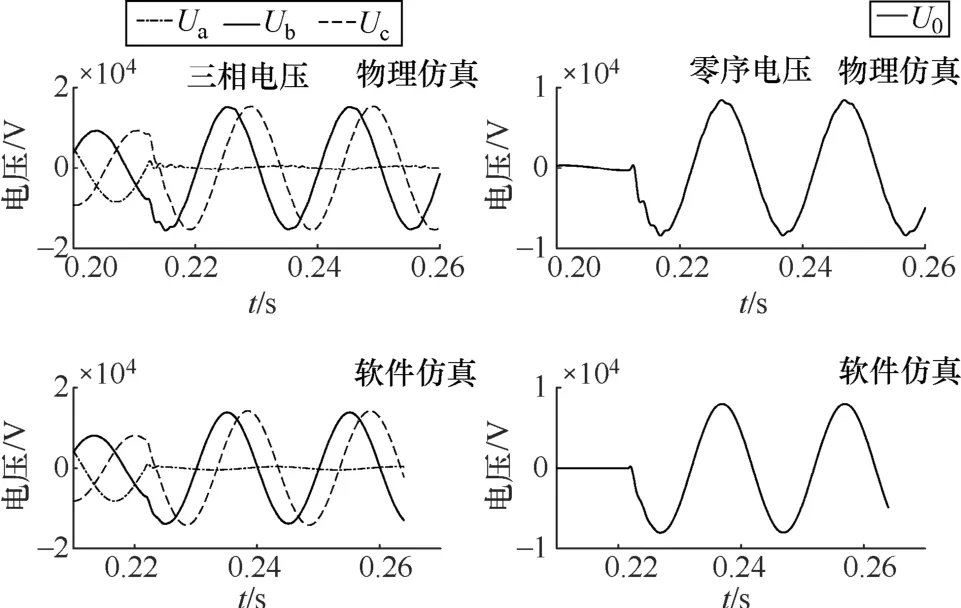
圖11 A相金屬性接地故障仿真驗證波形(? =0)

圖12 A相金屬性接地故障仿真驗證波形(? =π/2)
5 結論
本文提出基于配電網物理仿真系統的柔性故障發生裝置設計思路,對比于傳統故障發生裝置,改善了故障暫態特性和初相角控制精度。其主要特點如下:①故障發生裝置可模擬三相短路、兩相短路、弧光接地等多種故障。同時故障接地電阻可調,適應小電阻或高阻接地等故障模擬;②利用晶閘管快速導通特性,保證故障初相角的精確控制。在該裝置相角調節范圍內,誤差不超過5.4°;③利用晶閘管良好的動態特性控制故障生成,物理仿真與軟件仿真驗證了所提方法可保留故障信號的暫態過程。
下一步的工作是要加快 10kV柔性故障發生裝置的研制工作,通過采用串聯晶閘管的方式提高電力電子器件的整體耐壓水平,使其具備模擬 10kV電壓等級故障的能力。
[1] 孫銀鋒, 吳學光, 李國慶, 等. 基于等時間常數的模塊化多電平換流器柔直換流閥動模系統設計[J]. 中國電機工程學報, 2016(9): 2428-2437.
[2] 董鵬, 朱藝穎, 咼虎, 等. 特高壓電網建設初期“三華”電網數模混合實時仿真試驗研究[J]. 電網技術,2012, 36(1): 18-25.
[3] 何曉燕, 許志紅. 交流接觸器虛擬樣機設計技術[J].電工技術學報, 2016, 31(14): 148-155.
[4] 劉穎異, 陳德桂, 袁海文, 等. 帶電流反饋的永磁接觸器動態特性仿真與分析[J]. 中國電機工程學報,2010(15): 118-124.
[5] 宋金釗, 李永麗, 石崢, 等. 一種新的諧振接地系統單相接地故障選線方法[J]. 電力系統保護與控制,2017, 45(6): 9-15.
[6] 陳濤. 一種考慮合閘角大小的單相接地故障選線方法[J]. 山西電力, 2014(4): 12-15.
[7] Wang Wencong, Zhu Ke, Zhang Peng, et al.Identification of the faulted distribution line using Thyristor-Controlled grounding[J]. IEEE Transactions on Power Delivery, 2009, 24(1): 52-60.
[8] 徐海亮, 章瑋, 胡家兵, 等. 可編程電網故障模擬電源的設計[J]. 電工技術學報, 2012(10): 91-97.
[9] 吳巧玲, 繆希仁, 許火炬, 等. 相控開關的早期故障檢測及過零預測方法研究[J]. 電氣技術, 2016, 17(7):24-30.
[10] 姚偉, 孫海順, 文勁宇, 等. TCSC動模裝置及其實驗研究[J]. 電力自動化設備, 2009, 29(2): 51-55,68.
[11] 鄧家澤, 王奔, 黃崇鑫, 等. 基于晶閘管 STATCOM的無功補償控制[J]. 電網技術, 2009, 33(1): 48-51.
[12] 吳峰, 鄭建勇, 梅軍, 等. 基于可控串補的故障限流器[J]. 電網技術, 2012, 36(2): 53-57.
[13] 李黎, 馮希波, 鮑超斌, 等. 快速晶閘管在納秒脈沖高壓發生器中的應用分析[J]. 中國電機工程學報,2013, 33(16): 197-203, 前插25.
[14] Li Z, Wang J, Zhang F, et al. SCR series technology based on high-speed transient protection[C]//International Conference on Electric Power Equipment-Switching Technology. IEEE, 2011: 657-660.
[15] 許曄, 郭謀發, 陳彬, 等. 配電網單相接地電弧建模及仿真分析研究[J]. 電力系統保護與控制, 2015(7):57-64.
[16] 史永建, 曹現華, 史建省. 基于 PSCAD的改進型交流電弧爐負荷時域模型的仿真應用[J]. 電氣技術,2015, 16(11): 29-32.
[17] Khakpour A, Franke S, Uhrlandt D, et al. Electrical arc model based on physical parameters and power calculation[J]. IEEE Transactions on Plasma Science,2015, 43(8): 2721-2729.
[18] Wang Fei, Gao Houlei, Sun Yong, et al. Arc grounding model and simulation in non-effectively grounded system[C]//2015 5th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT 2015), 2015: 358-362.
[19] 行晉源, 李慶民, 叢浩熹, 等. 長距離輸電線路潛供電弧弧根跳躍與弧長劇變的物理機制與仿真[J]. 電工技術學報, 2016, 31(12): 90-98.
Flexibility Fault Generating Device of Physical Simulation System for Distribution Network
Lin Aolin1Guo Moufa1Gao Wei1Huang Jianye2
(1. College of Electrical Engineering and Automation, Fuzhou University, Fuzhou 350108;2. State Grid Fujian Electric Power Research Institute, Fuzhou 350007)
Design of flexibility fault generating device in physical simulation system for distribution network has been proposed, to overcome the previous fault generating device’s shortcomings of mechanical contact bounce and uncontrollable fault initial phase. Since the device combines the phase angle of line voltage detected by zero-crossing comparator in physical simulation system, it can control trigger time of thyristor to ensure precise control of fault initial phase. Because of the thyristor’s microsecond-conduction-time and excellent dynamic characteristic, the controlling accuracy of fault initial phase and transient state similarity with actual fault waveform has been improved. This method is verified by experiment in physical simulation system for distribution network and equivalent simulation based on PSCAD/EMTDC. Results show that the device can preserve transient characteristic of short-circuit fault well and has high controlling accuracy of fault initial phase.
distribution network; physical simulation; flexible control; fault generating; fault initial phase
國家自然科學基金項目(51677030、51377023)
晉江市科技局工業科技項目資助(J(2005)235)
林奧林(1992-),男,福建三明人,碩士研究生,研究方向為配電網自動化。
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
汽車維修與保養(2015年6期)2015-04-17 03:31:50
中學生(2015年2期)2015-03-01 03:43:33
