舵傳動裝置的液壓與電氣驅動振動特性對比研究
2017-12-13 02:07:19向科兵李維嘉蘭秋華
中國艦船研究 2017年6期
關鍵詞:振動
向科兵,李維嘉,蘭秋華
1華中科技大學船舶與海洋工程學院,湖北武漢430074
2華中科技大學能源與動力工程學院,湖北武漢430074
舵傳動裝置的液壓與電氣驅動振動特性對比研究
向科兵1,李維嘉1,蘭秋華2
1華中科技大學船舶與海洋工程學院,湖北武漢430074
2華中科技大學能源與動力工程學院,湖北武漢430074
[目的]針對傳統的液壓驅動的舵傳動裝置,基于縮比舵傳動裝置試驗臺,開展電氣驅動方式振動特性研究。[方法]首先研究舵傳動裝置在電氣驅動下機構本身振動特性與負載力及轉動角速度的關系,然后對液壓、電氣兩種驅動方式下機構的振動特性進行對比分析。[結果]試驗表明,傳動裝置產生的振動強度與舵葉加載力、舵角零點位置角速度呈正相關,電氣驅動方式產生的振動加速度峰峰值和均方根值與液壓驅動相比均降低了40%,有效降低了傳動裝置的整體振動,[結論]對舵傳動裝置電氣化具有參考價值。
舵傳動裝置;液壓驅動;電氣驅動;振動特性
0 引 言
世界各國海軍為提升整體作戰能力、提高新一代主戰艦艇和軍輔船等作戰平臺的隱身性能,已在艦船上廣泛使用綜合全電力系統,并發展動態重構的“全電力戰艦”。
舵機系統是艦船操控系統的重要組成部分,其產生的流體噪聲和機械噪聲也是艦船的重要噪聲源之一[1]。抑制舵機系統自身的噪聲,是提升艦船隱身性能和改善艦船內部工作環境的一項行之有效的措施。在傳統的艦船操控系統中,舵機主要通過液壓系統進行控制。液壓舵機系統雖然可以提供較大負載和容易實現過載保護,但是其缺點也非常明顯,占用體積大、泄漏無法避免、產生的機械噪聲和流體噪聲大[2]。近年來,隨著綜合全電力系統的運用,舵機系統開始采用伺服電機驅動,并且交流變頻、現代控制等技術的高速發展解決了交流電機調速性能較差、響應速度較慢等問題。與液壓舵機相比,電動舵機占用空間少、不會產生流噪聲、機械噪聲較小,能有效提升作戰平臺的隱身性能。目前,國內外關于液壓舵機和電動舵機的模態分析及有限元仿真等方面的研究較多[3-7],但大都缺乏實驗研究。本文擬基于某船用舵傳動裝置縮比試驗臺,對液壓和電氣兩種驅動控制方式下舵傳動裝置的振動加速度特性進行對比研究,探討艦船舵機系統電氣化的可行性。
1 舵傳動裝置縮比試驗系統
舵傳動裝置縮比試驗系統主要由試驗臺架、舵葉加載系統、集中控制系統和數據采集系統4部分組成。此裝置是由某型實船舵機系統經過1∶4的縮比得到,在確定了試驗系統的性能參數后,設計了如圖1所示的試驗臺架,主要通過液壓缸或者電動缸驅動與之直接相連的傳動拉桿和曲柄拉桿提供動力,帶動舵葉運動。另外,還提供2個加載液壓缸分別對舵葉進行加載,模擬舵機系統在有載情況下的操舵過程。
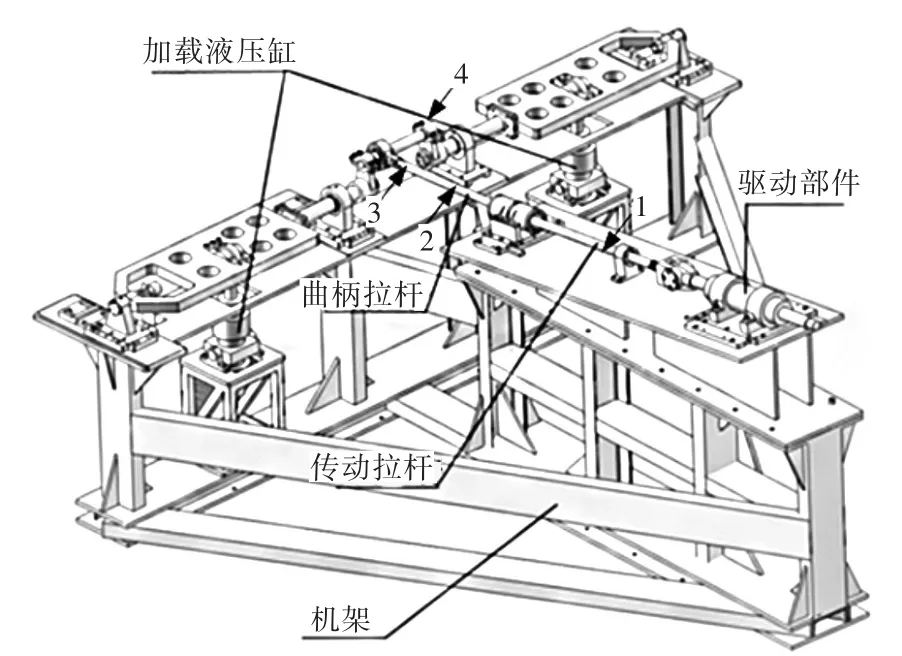
圖1 試驗臺架結構圖Fig.1 Test bench structure
加載系統主要用于舵傳動裝置運行過程中給舵葉施加一定的負載壓力,模擬舵機系統工作過程中受到的外作用力。實船操舵過程中,隨著舵角變化,舵所受作用力比較復雜,為便于研究,將作用力大小近似成隨著舵角進行線性變化。采用由預充壓力蓄能器與加載液壓缸構成液壓彈簧的被動式加載系統,可以提供最大50 kN的加載能力,響應速度較快,且工作過程中沒有振動噪聲。
集中控制系統具有液壓伺服驅動控制和電氣伺服驅動控制兩種控制模式。前者采用電液位置伺服控制方式[8],通過模擬量信號反饋舵角的當前位置,經電液伺服閥驅動液壓缸做出快速、準確、平穩的跟隨動作,液壓伺服控制原理圖如圖2所示。后者采用基于CANopen現場通訊的數字式交流伺服驅動控制方法[9],上位機通過CANopen通訊向伺服驅動器發送目標位置的數字量控制指令,伺服驅動器驅動伺服電機轉動,經滾珠絲杠及電動缸,帶動舵葉做出快速、準確、平穩的跟隨動作。電氣伺服控制原理圖如圖3所示。
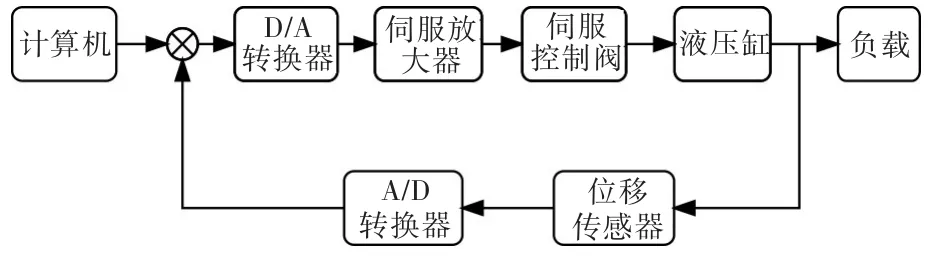
圖2 液壓伺服控制原理圖Fig.2 Hydraulic servo control schematic
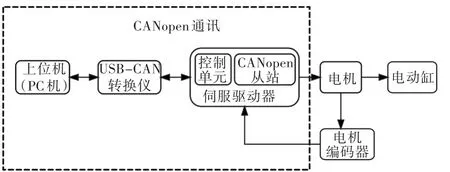
圖3 電氣伺服控制原理圖Fig.3 Electro servo control schematic
測量系統對電動缸直接作用的傳動拉桿產生的振動和從傳動拉桿經過導向裝置傳到曲柄拉桿的振動進行測量。為對比研究兩種驅動方式下驅動缸出口處的振動加速度和經過空間滑塊機構驅動舵葉過程中振動加速度的傳遞、放大情況[10-11],如圖1所示布放加速度傳感器。圖中1~4代表1~4號傳感器。其中,1號傳感器布放在傳動拉桿靠近液壓缸或者電動缸出桿處,2號傳感器布放在在曲柄拉桿上靠近導向裝置處,3號傳感器布放在曲柄拉桿上遠離導向裝置處,4號傳感器布放在曲柄上。1號傳感器測量驅動端的振動,其他3個測量傳動裝置端的振動,在這3個傳感器中選取最典型的2號傳感器進行研究。
數據采集系統采用的是日本東京測器研究所TML公司的TMR200測量儀,加速度傳感器采用352C33型傳感器,靈敏度為100 mV/g,測量范圍±50g,頻率工作范圍0.5~10 kHz,可以滿足本試驗各工況下的測量要求。
2 電氣驅動的振動特性研究
舵機系統在操舵過程中產生的振動噪聲有很多影響因素,影響最大的是打舵過程中舵受到的作用力以及打舵速度的快慢。同時,舵葉受到的作用力不僅與舵角有關,也與船的航速密切相關。為研究電氣驅動方式下舵傳動裝置在運行過程中的振動特性,控制舵傳動裝置做典型的正弦規律運動,分別在以下兩種工況下開展振動試驗并測量其加速度數據,分析振動特性。
1)定斜率加載力、舵葉不同轉角速度下的振動試驗研究;
2)舵葉定轉角速度、不同斜率加載力下的振動試驗研究。
其中,定斜率加載力工況近似于定航速時舵葉的受力工況;定轉角速度工況近似于某一打舵速度下不同航速工況。考慮到舵機系統正常打舵范圍是±20°,所以本次試驗主要研究20°舵角以內系統的振動加速度特性。
在加載力為最大加載力60%的典型工況下,通過控制上位機的正弦信號值,使得舵葉運動經過舵角零點位置時轉角速度分別為1,2,3,4和5(°)/s并進行振動試驗,測得運動過程中1號和2號傳感器振動加速度曲線如圖4~圖8所示。
從圖中可以發現,傳動拉桿處的振動加速度峰峰值和均方根值均比較小,曲柄拉桿處的振動較大,說明電動缸的控制效果較好,運行較為平穩。
同樣,將加載力分別調整為最大加載力的40%和80%,進行定斜率加載力振動試驗,測得運動過程中1號和2號傳感器處的振動加速度,經過數據分析軟件預處理后,將3組加載力試驗的結果導入Matlab,計算得到定斜率加載力和定轉角速度兩種工況下各組加速度峰峰值和均方根值(單位:0.1 g),如表1和表2所示。
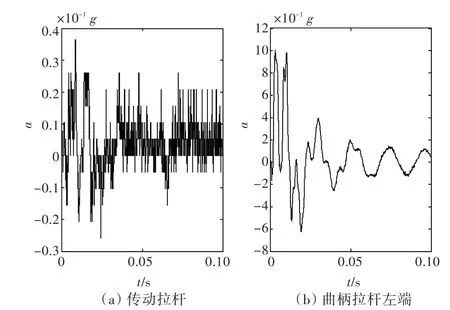
圖4 舵葉轉角速度1(°)/s時的振動加速度曲線Fig.4 Vibration acceleration curves when angular velocity of rudder blade is 1(°)/s
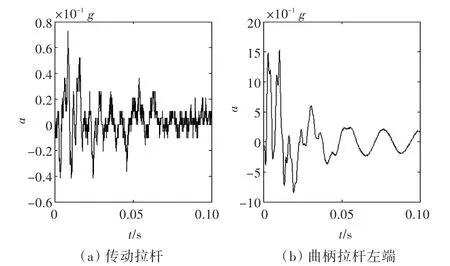
圖5 舵葉轉角速度2(°)/s時的振動加速度曲線Fig.5 Vibration acceleration curves when angular velocity of rudder blade is 2(°)/s
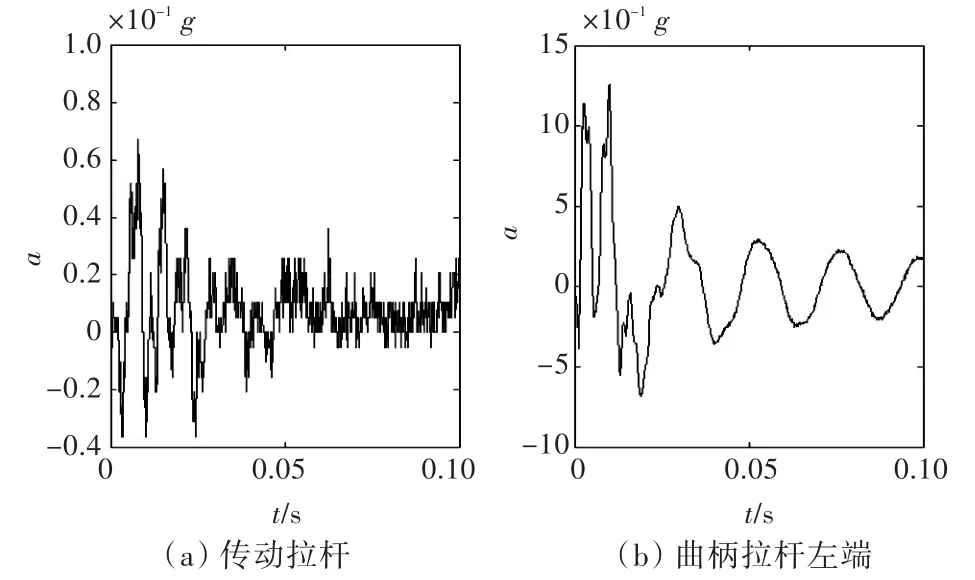
圖6 舵葉轉角速度3(°)/s時的振動加速度曲線Fig.6 Vibration acceleration curves when angular velocity of rudder blade is 3(°)/s
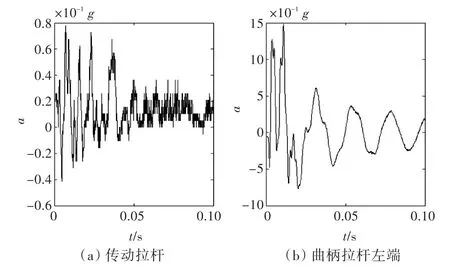
圖7 舵葉轉角速度4(°)/s時的振動加速度曲線Fig.7 Vibration acceleration curves when angular velocity of rudder blade is 4(°)/s
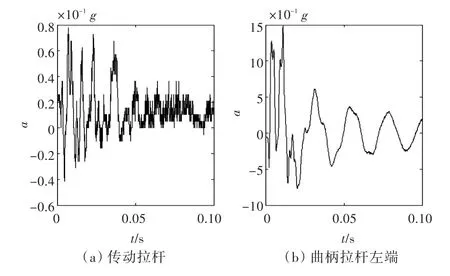
圖8 舵葉轉角速度5(°)/s時的振動加速度曲線Fig.8 Vibration acceleration curves when angular velocity of rudder blade is 5(°)/s
根據對舵傳動裝置電氣驅動不同加載力、不同最大角速度的各種工況下測得的試驗數據以及上面繪制的加速度峰峰值和均方根值圖表的分析可知,舵葉運行到最大角度處的負載力越高、運行過程中舵角零點位置的角速度越大,驅動系統產生的振動強度越高;此外,在振動從傳動拉桿向曲柄拉桿軸向傳遞過程中,振動強度快速增加,這主要是因為導向裝置中旋轉副與曲柄拉桿鉸接處存在間隙,振動在經過間隙的過程中被放大了。
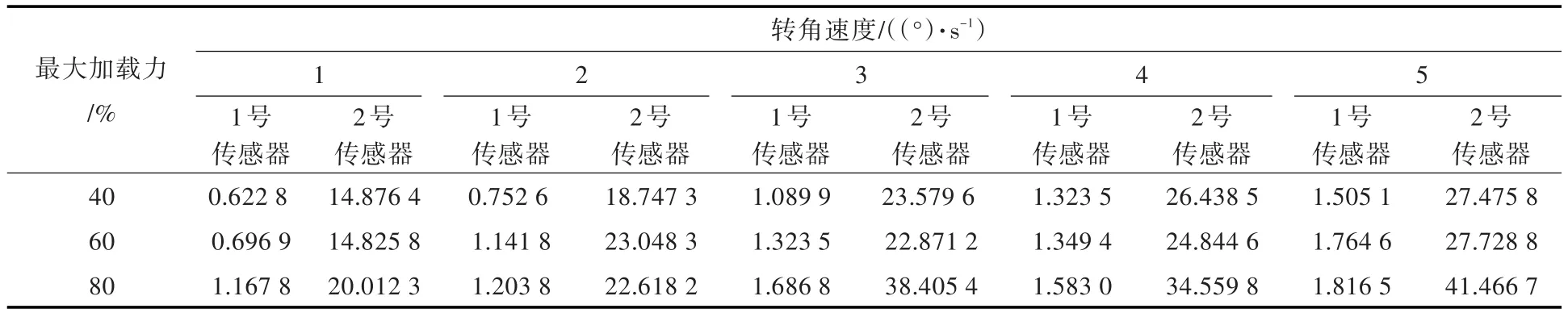
表1 不同工況下的加速度峰峰值Table 1 Peak-to-peak acceleration values in different conditions

表2 不同工況下的加速度均方根值Table 2 Root-mean-square acceleration values in different conditions
3 不同驅動方式下振動特性對比
為開展舵機系統在液壓驅動和電氣驅動兩種方式下系統產生的機械噪聲對比研究,分別在舵傳動裝置上進行一系列正弦運動試驗。為在液壓驅動方式下獲得系統的控制平穩性,按文獻[11]進行優化設計,以使在直線加速控制策略下系統產生的振動最小。調整舵葉加載系統使得加載力分別為最大加載力的40%,60%和80%,舵葉運動經過舵角零點位置時轉角速度分別為1,2,2.5,3,4和5(°)/s,振動試驗后測量1號和2號傳感器處的振動加速度,經過Matlab計算得到各組加速度數據的峰峰值和均方根值,并繪制兩種驅動方式在不同工況下計算結果的變化趨勢圖,如圖9和圖10所示。
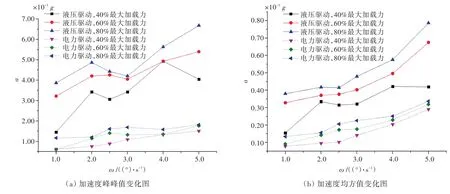
圖9 兩種驅動方式下傳動拉桿振動加速度峰峰值和均方根值變化圖Fig.9 Peak-to-peak and root-mean-square values of vibration acceleration ofthe transmission rod under two drive modes
通過對比分析舵傳動裝置的液壓伺服驅動和電氣伺服驅動兩種控制方式下傳動拉桿、曲柄拉桿左端振動加速度的峰峰值和均方根值的變化情況,可以得出以下結論:
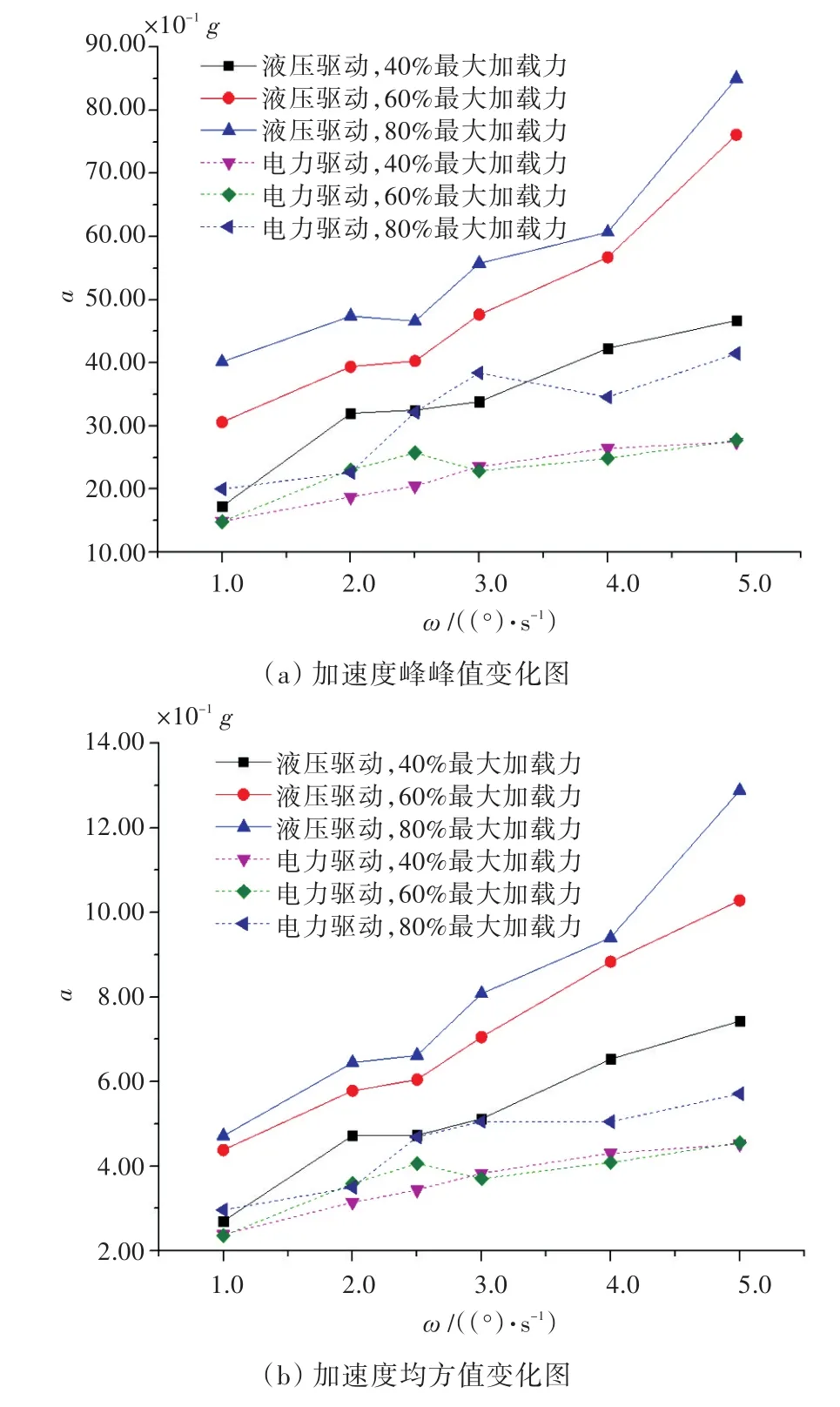
圖10 兩種驅動方式下曲柄拉桿左端振動加速度峰峰值和均方根值變化圖Fig.10 Peak-to-peak and root-mean-square values of vibration acceleration of the left end crank rod under two drive modes
1)兩種驅動方式下舵傳動裝置驅動系統產生的振動均隨舵葉在舵角零點位置角速度的增大而增強,隨著舵葉在最大角度處承受負載力的增加而增強。
2)隨著舵傳動裝置在舵角零點位置角速度的逐漸增大、舵葉負載力的增加,特別是在4和5(°)/s轉角速度時,液壓驅動方式產生的振動增強較為快速,電氣伺服驅動控制方式產生的振動增強較為平緩。
3)舵傳動裝置在小負載、低轉角速度的工況下,兩種驅動方式產生的振動加速度峰峰值和均方根值差距不大,均不超過10%;在較大負載、較高轉角速度工況下,電氣伺服驅動產生的振動加速度峰峰值和均方根值較液壓伺服驅動均有較為明顯的降低,降幅約為40%。
4)從舵傳動裝置的振動強度和系統平穩性來看,電氣伺服驅動方式優于液壓驅動方式。
4 結 語
通過舵傳動裝置在不同加載力、不同舵角零點位置角速度兩種工況下的振動特性試驗,首先研究了電氣驅動方式下傳動裝置本身的振動加速度特性,試驗表明驅動系統產生的振動強度與舵葉加載力、舵角零點位置角速度呈正相關,并且振動在機構中傳遞過程中強度逐漸增加;隨后,對液壓驅動和電氣驅動兩種方式下產生的振動加速度進行了對比研究,從試驗來看,舵機電氣驅動產生的振動加速度峰峰值和均方根值和液壓驅動相比均降低了40%,電氣驅動方式在機械振動噪聲和系統運行平穩性方面性能更好,電動舵機替代液壓舵機在性能指標上是可行的。
[1]何世清.船舶機械設備的噪聲分析與有效控制方案研究[J].科技與創新,2015(12):115.HE S Q.Noise analysis and control scheme of ship ma?chinery equipment[J].Science and Technologyamp;In?novation,2015(12):115(in Chinese).
[2]馬興瑞.船舶液壓舵機系統中的流體噪聲控制[D].哈爾濱:哈爾濱工程大學,2010.MA X R.Fluid noise control of ship hydraulic rudder system[D].Harbin:Harbin Engineering University,2010(in Chinese).
[3]LIN C G,ZOU M S,JIAO H F,et al.Identification of non-stationary excitation and analysis of transient radi?ation noise on steering engine[J].Journal of Ship Me?chanics,2016,20(6):758-767.
[4]孟勃敏,呂玉清,任工昌.滾珠絲杠副抗共振可靠性的有限元分析[J].組合機床與自動化加工技術,2011(2):10-12,16.MENG B M,LV Y Q,REN G C.Analysis of the reli?ability of anti-resonance for ball screw based on the fi?nite element method[J].Modular Machine Toolamp;Au?tomatic Manufacturing Technique,2011(2):10-12,16(in Chinese).
[5]WANG T,WANG K H,XIE K H.An analytical solu?tion to longitudinal vibration of a pile of arbitrary seg?ments with variable modulus[J].Acta Mechanica Soli?da Sinica,2001,14(1):67-73.
[6]趙萬軍.基于ANSYS的滾珠絲杠進給系統靜動態特性分析[J].機械傳動,2010,34(5):68-70.ZHAO W J.Analysis of static and dynamic characteris?tic of ball screw feeding system based on ANSYS[J].Journal of Mechanical Transmission,2010,34(5):68-70(in Chinese).
[7]聞邦椿,劉樹英,何勍.振動機械的理論與動態設計方法[M].北京:機械工業出版社,2002.
[8]鮮麟波.閥控缸電液位置伺服系統研究[D].武漢:華中科技大學,2007.XIAN L B.Research on valve-controlled cylinder elec?tro-hydraulic position control system[D].Wuhan:Huazhong University of Science and Technology,2007(in Chinese).
[9] 劉玉倩,侯為萍,高建利.基于CANopen協議的運動控制系統底層驅動軟件實現[J].電子工業專用設備,2014,43(12):31-34.LIU Y Q,HOU W P,GAO J L.The software realiza?tion of motion control system low level driver based on CANopen protocol[J].Equipment for Electronic Prod?ucts Manufacturing,2014,43(12):31-34(in Chi?nese).
[10] FUNABASHI H,OGAWA K,HORIE M,et al.A dy?namic analysis of the plane crank-and-rocker mecha?nisms with clearances[J].Bulletin of JSME,1980,23(177):446-452.
[11]黃亞農,謝剛,李維嘉,等.船舶舵機傳動機構的沖擊振動及優化控制研究[J].武漢理工大學學報(交通科學與工程版),2017,41(1):132-135,140.HUANG Y N,XIE G,LI W J,et al.Research on the impact vibration and optimal control of a mechanism for steering gear with clearance[J].Journal of Wuhan University of Technology(Transportation Scienceamp;Engineering),2017,41(1):132-135,140(inChinese).
Comparative study of rudder transmission vibration characteristics of electric and hydraulic drive
XIANG Kebing1,LI Weijia1,LAN Qiuhua2
1 School of Naval Architectureamp;Ocean Engineering,Huazhong University of Science and Technology,Wuhan 430074,China
2 School of Energy and Power Engineering,Huazhong University of Science and Technology,Wuhan 430074,China
[Objectives]A comparative study of the rudder transmission vibration characteristics of electric drive and traditional hydraulic drive is carried out on the basis of a telescopic rudder transmission test bed.[Method]First,a study is made of the rotational angular velocity and the relationship between the vibration characteristics and load force of a rudder transmission driven by an electric servo motor.Next,the vibration characteristics of the mechanism under hydraulic drive and electric drive are compared and analyzed.[Results]The results indicate that the vibration intensity has a positive correlation with the rudder blade loading force and angular velocity at the zero balance position.Both the peak-to-peak values and root-mean-square values of the vibration acceleration of the electric drive are reduced by 40%compared with the hydraulic drive,meaning that the electric drive can more effectively reduce the overall vibration of the rudder transmission.[Conclusions]The results provide a reference for the electrification of the rudder transmission.
rudder transmission;hydraulic drive;electric drive;vibration characteristics
U664.36
A
10.3969/j.issn.1673-3185.2017.06.017
http://kns.cnki.net/kcms/detail/42.1755.TJ.20171128.1102.014.html期刊網址:www.ship-research.com
向科兵,李維嘉,蘭秋華.舵傳動裝置的液壓與電氣驅動振動特性對比研究[J].中國艦船研究,2017,12(6):114-119.
XIANG K B,LI W J,LAN Q H.Comparative study of rudder transmission vibration characteristics of electric and hydraulic drive[J].Chinese Journal of Ship Research,2017,12(6):114-119.
2017-05-02 < class="emphasis_bold"> 網絡出版時間:
時間:2017-11-28 11:02
向科兵,男,1991年生,碩士。研究方向:艦船液壓與機電控制。E-mail:1215908069@qq.com
李維嘉(通信作者),男,1964年生,博士,教授,博士生導師。研究方向:水下作業系統,機電液智能控制系統,機器人。E-mail:liweijia@hust.edu.cn
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
