雷達液位計測距技術在船舶水尺計重中的應用
2017-12-13 02:07:24沈益駿李博王鵬皓
中國艦船研究 2017年6期
沈益駿,李博,王鵬皓
1舟山出入境檢驗檢疫局,浙江舟山316000
2浙江海洋大學海洋科學與技術學院,浙江舟山316004
雷達液位計測距技術在船舶水尺計重中的應用
沈益駿1,李博2,王鵬皓2
1舟山出入境檢驗檢疫局,浙江舟山316000
2浙江海洋大學海洋科學與技術學院,浙江舟山316004
[目的]傳統船舶水尺計重過程中,檢視船舶吃水依賴人工目測方法,該方法存在主觀性強、準確度及工作效能低等問題。為了解決該問題,[方法]利用在石化行業廣泛應用于石油及制品上的雷達液位測距技術,研發一套雷達水尺觀測裝置,設計優化系列數據計算公式,使其數據結果真實可靠。同時設計雷達和目測檢視的對比驗證試驗,檢驗其數據結果的準確度。[結果]由雷達傳感器、固定支架、顯示器等共同組成的雷達水尺檢測裝置依據靠港船舶的實際應用環境量身打造,并在設計的驗證試驗中進行試用。[結論]設計定型的雷達水尺檢測裝置以15船次國際船舶為研究對象,以雷達和人工目測2種方式檢視船舶吃水并進行對比試驗,數據表明差異范圍在0.001~0.022 m之間,平均差異率為0.028%,符合對船舶吃水檢視精度的要求。
雷達液位計;船舶吃水;水尺計重
0 引 言
水尺計重[1]是國外廣泛應用于船舶運輸大宗廉價散裝貨物計量重量的方法,同時也是進出口商品重量鑒定的重要方法之一。水尺計重中影響計量準確性的最關鍵因素是船舶六面吃水數值的讀取。傳統的觀測吃水,往往是通過租用工作艇或小船,使其靠近船舶外檔水尺標志位置,再進行目測讀數。這種方法不僅時效性差、費用高、準確性低,且工作人員的人身安全也很難得到保證。
針對此類問題,船舶領域的相關專家學者基于圖像處理、電子尺等先進技術提出了多種船舶吃水檢測方法。陳文煒等[2]提出利用激光測距傳感器的吃水測量系統的測量方法,雖然激光較雷達測距遠、精度高,但是激光測距前需在水面鋪放經特殊處理的反射板,否則激光傳感器難以接收反射光束,最終導致無法準確給出數據。當前,全國各大重要港區都在力促船舶快進快出,提高碼頭使用率,而激光測距過程繁瑣,測前還需鋪設反射板,顯然難以適應港區日常作業的要求。馬曉波等[3]提出了一種船舶水尺測量物理投尺法,但如何控制尺頭傳感器在觸水的一刻精準發出警報,并做到立即暫停投尺則是重點和難點,這一難以有效解決的問題也是導致水尺數據準確度低的關鍵所在。冉鑫等[4]提出了基于圖像處理的船舶水尺刻度識別方法,雖然現階段在圖像識別理論方面已較完善,但是圖像的采集,以及圖像中水尺標志所處的位置及圖片清晰度都與能否準確識別息息相關,況且圖像識別中的吃水線識別尚未完全解決。
可以看出,在前人的研究中,上述水尺檢測方法尚不能完全解決船舶吃水讀數問題。當前,由于雷達[5]具有測距精度高、可靠性強等優點被諸多領域廣泛使用,尤其在石油儲罐液位計量中被各大儲運公司大量使用。但在船舶觀測吃水領域,尚未有相關文獻記錄顯示雷達的投入應用。為實現高效、準確讀取船舶吃水數據的目標,鑒于雷達液位計測距技術在石油化工行業的廣泛應用,同時具備簡單易操作且準確性較高的特點,認為研發一種利用雷達液位計測距技術測量船舶吃水的裝置是可行的。
本文將以雷達傳感器、靠港船舶為研究對象,基于國際通用海運船舶,研發一套雷達液位計船舶吃水觀測裝置。首先,根據量程、作業環境等因素選擇精度適宜、操作簡單的雷達測距傳感器;接著,結合船舶自身的構造特點,研發支架系統,用以穩固雷達傳感器并輔以量身設計的計算系統,測量結束后可自動給出吃水數值;最后,設計驗證試驗,證明該套系統的準確性。
1 原理與方法
國外于20世紀60年代開始使用雷達液位計測距技術。它是一種采用微波測量技術的非接觸式液位測量系統。該技術通過更新換代,發展至今已非常成熟,具有可靠性強、精度高等特點。雷達液位計被廣泛應用于石油化工行業,其測量精度得到了國際計量機構的認證,已達到貿易交接的物料計量要求[6]。因此,采用雷達液位計測距技術實現距離測量是可行的。船舶雷達水尺測量儀的測量工作原理如圖1所示,測量儀用可移動三腳架放置于船舶主甲板上,雷達探頭旋轉出船舶舷側并垂直指向海面。打開雷達液位測量儀,首先連續測量不超過2 min,且至少包括2個以上波浪涌動周期,以此較準確地獲取雷達探頭至海面的平均垂直距離D,扣除已知的固定支架至雷達探頭的距離(即三腳架高度)E,就可以得到甲板至吃水線的距離 B;甲板線至船舶基線[7]的距離 A由船舶自身參數查得;利用雷達測得距離B+E;則船舶實際吃水C為

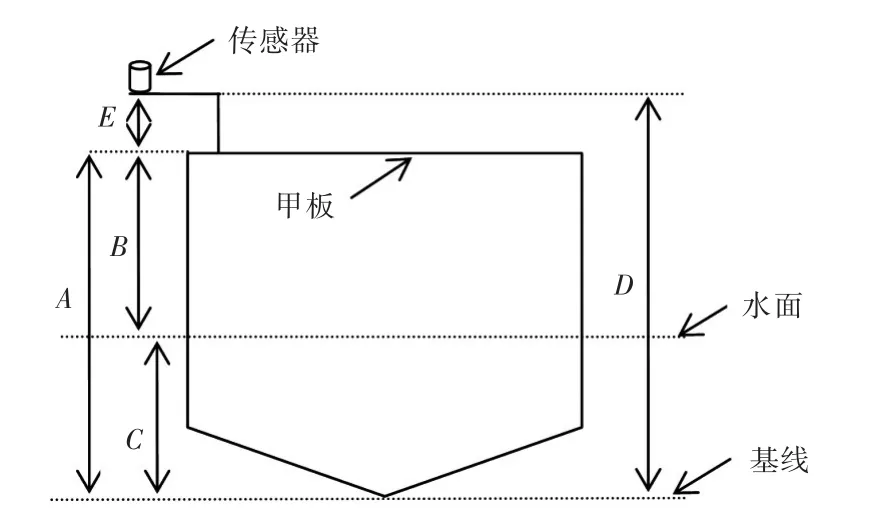
圖1 測量裝置使用示意圖Fig.1 Schematic diagram of measuring device
2 測量點的分布
水尺是表示船舶吃水深度的標志,它對稱地標在船艏、船艉以及船舯兩舷[8]。水尺是以船底龍骨線下緣為零點,自下而上順序標明至船舶最大吃水以上。因此,結合測量需求,船舶吃水測量系統可以沿船身水尺標志處,在左、右舷甲板各布置3個測點,船艏、船艉、船舯各分布2個測量點,共計 6 個測點[9],分別為 C1,C2,C3,C4,C5,C6,其分布如圖2所示。
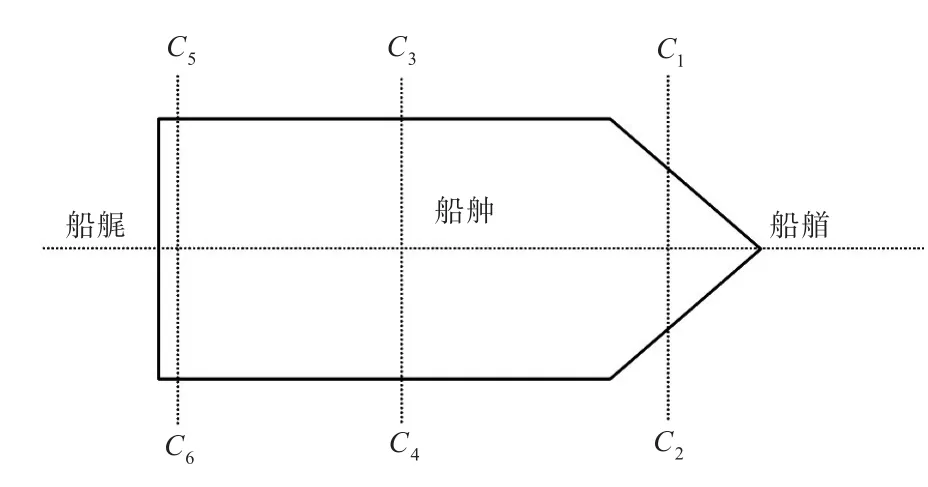
圖2 測量點分布Fig.2 Distribution of measuring points
3 雷達水尺觀測器設計
該雷達水尺觀測器由固定支架、雷達傳感器、計算單元及顯示單元4部分組成。觀測器部分功能如圖3所示。
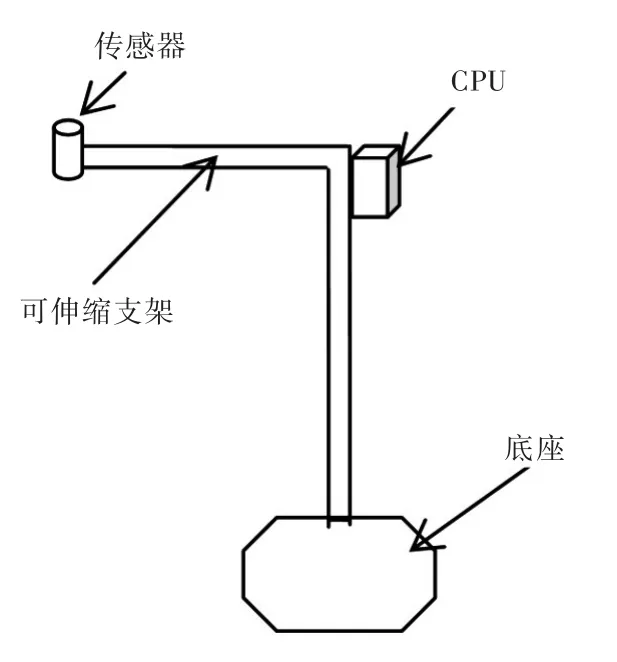
圖3 雷達水尺檢測器設計簡圖Fig.3 Design sketch of measuring device
3.1 雷達傳感器及固定支架
固定支架主要起穩固雷達傳感器的作用,且其自身高度為定值。具體操作如下:檢測時,將雷達傳感器及三腳架安放于船舶水尺標志位置所處的甲板,保證腳架垂直于甲板表面,否則將引入計量誤差。在準備工作就緒后,調整傳感器位置,并使其垂直射向水平面。由于港口環境潮濕,電子器械受潮不僅易損壞,且影響計量精度,為有效提升雷達傳感器的耐用性,確保其測量的準確性,傳感器需進行防水處理,要求有防水膜對其進行包裹。在本裝置內,雷達電磁波的發射裝置與接收裝置合二為一,全部集中于圖3所示的測量裝置探頭內。該傳感器可在較短的時間內精準測量多組數據,以此確保在后續數據處理過程中的延續性與準確性。在進行測量工作時,雷達傳感器發射電磁波,同時積極接收回波信號,將回波信號進行放大、定位,自動進行分析處理。數據處理完畢即進行實時存儲。
3.2 數據計算及顯示單元
該裝置內置可充電鋰電池,為儀器正常運行提供所需電力,同時在固定支架末端集成數據接收模塊、處理模塊與集成電路板。CPU采用雙串口的單片機,一個串口連接雷達傳感器,用于接收處理傳感器的測量數據,另一個串口連接無線數傳模塊,用于無線傳輸處理后的數據。具體操作步驟如下:雷達傳感器獲取的數據通過固定支架內部布置的數據線路直接傳輸至CPU,并由其優先進行數據處理。對傳感器的每一次測量進行自動加權平均計算,并把計算結果自動保存在TF存儲卡內。此數據可作為歷史資料存檔備用。一旦貨量存有爭議,可隨時翻閱歷史存儲檔案,還原當時現場檢驗鑒定情況,解決現場查驗不可追溯的問題。為了免除重復拔插TF卡讀取船舶吃水數值的麻煩,同時為使數值的讀取簡單易操作,本裝置還設計了計算結果顯示單元。如圖4所示,該顯示裝置裝有液晶顯示面板,用于顯示測量出來的數據。同時,設置按鍵用于控制儀器開關與測量次數的計量、重置數據以及輸入相關參數等功能。
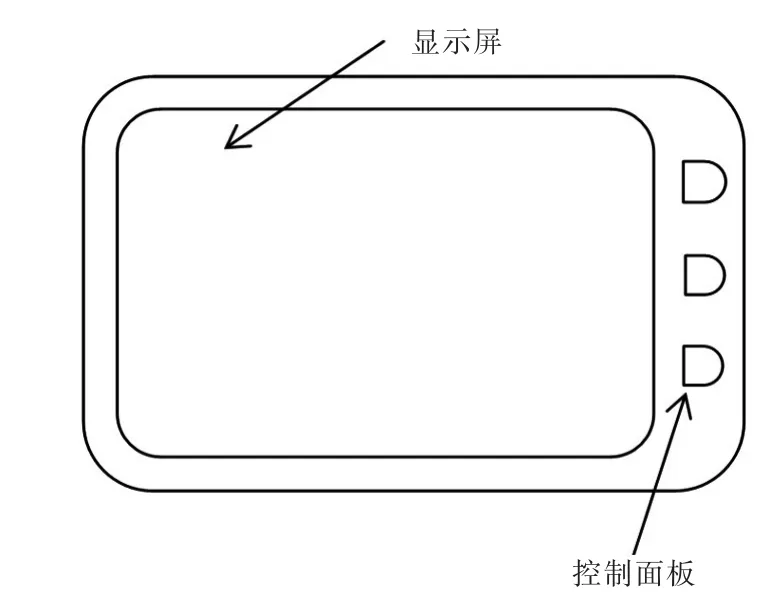
圖4 顯示器Fig.4 Monitor
4 使用方法
該雷達水尺觀測裝置的使用目的在于取代傳統乘坐拖輪或小船觀測船舶六面吃水的方法,同時擺脫現場環境及天氣的束縛。該觀測器具體使用方法如下:待船舶靠港且系纜完畢后,由檢驗員將儀器攜帶至船舶水尺標志位置的甲板線[10]處,在測量前,首先確保甲板線與固定支架底座處于同一水平面位置,否則,有必要測出兩水平面的直線距離。由于此觀測器是基于甲板線并以此為基準點,若固定支架底座平面與甲板線平面存在垂直高度,當進行船舶吃水計算時,則需進行修正處理,否則影響計量的準確性。放好后,調整支架,使儀器整體處于穩定狀態,同時雷達傳感器處于船體外側且傳感器垂直于水面。考慮到在港船舶會因風浪而波動,為消除波浪的影響,在位置調整穩妥后,需打開儀器開關,進行連續一段時間的測量(連續測量不少于2 min)。雷達液位計在該測量點測出的一系列數據會直接傳輸至CPU內進行數據記錄和處理。對剩下的5處測量點該裝置以同樣的方式依次展開測量,待全部測量點測量完成后,根據顯示的所有測點數據的周期性變化曲線,選取相應的同步時間段數據進行平均計算。其流程如圖5所示。
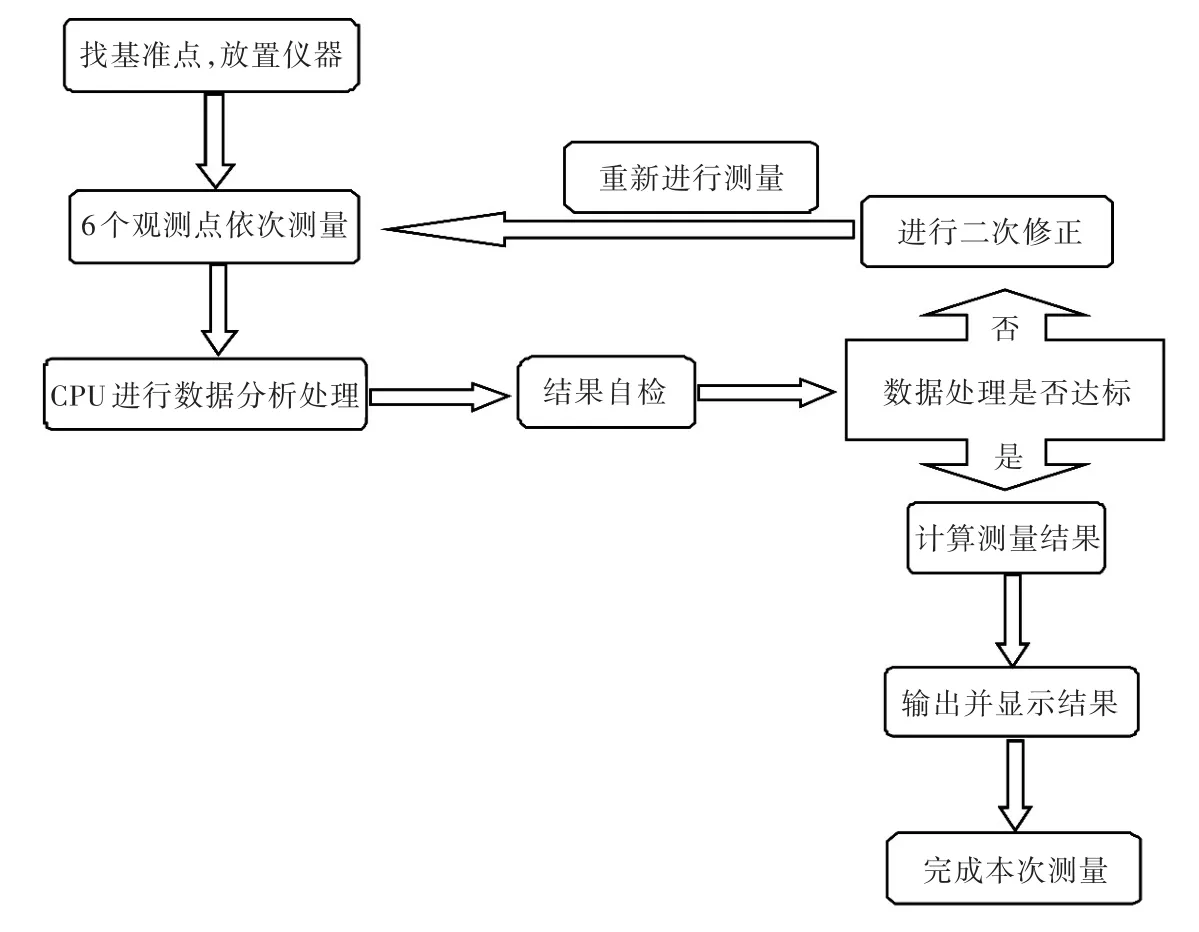
圖5 檢視船舶吃水流程圖Fig.5 Flow chart of reviewing ship draft
5 數據處理
5.1 雷達液位測量距離數據處理
當散貨船舶停泊于相應的港區后,特別如舟山等入海口波濤洶涌,常年伴有大風,靠港船舶的實際水尺讀數勢必受到影響。為消除波浪等因素的影響,保證船舶吃水讀取的準確性,在測量時,雷達液位計的傳感器置于船體外側,且進行持續至少2 min的數據觀測。傳感器接收單元會持續接收發射單元反射回來的雷達電磁波。同時,依次測量并記錄傳感器至水面的距離數據。該裝置將接收到的每一個數據記錄下來,標注為d( d1,d2,d3,d4,…,dn),并記錄每次測量所用的總時間 T0(單位:min)。
針對T0時間段內的d值進行積分,得到總量程

式中,d為某次測得的傳感器到水面的垂直距離,m。
將得到的 DS與測量總的時間T0相除,即可得到傳感器至水面的距離D,公式為:

式中,D為傳感器至水面的距離,m。
由于傳感器從發射到接收信號為來回里程,所以上述公式在計算傳感器至水面的距離時只能算其一半的距離。為保證測量結果的準確性,在每個測量點需進行2次以上測量,測量后再對其進行加權平均。獲取該測量值后,最后以電子文檔的形式自動存儲于TF卡中。
以此測量方法為依據,依次對位于船舶上的6個測量點(C1,C2,C3,C4,C5,C6)進行測量,得到6個測量值,分別記為 D1,D2,D3,D4,D5, D6。
5.2 船舶吃水的校正
根據陳亞飛等[11-12]相關學者研發新型船舶吃水觀測器的經驗可知,船舶水尺標志是否在其艏艉垂線上,以及船舶拱陷是否予以修正對于水尺計重結果的準確性存在重要影響。因此,結合已有的經驗,提出如下計算方法。
船舶吃水通過橫傾、縱傾及拱陷3個部分校正得到,計算精度為 0.001 m[13]。
5.2.1 橫傾校正
橫傾是指船舶左、右舷吃水不同,為了正確計算,必須首先對橫傾狀態下船舶的吃水進行校正。
由于船體左右對稱,故橫傾校正只需對左右吃水數進行算術平均:
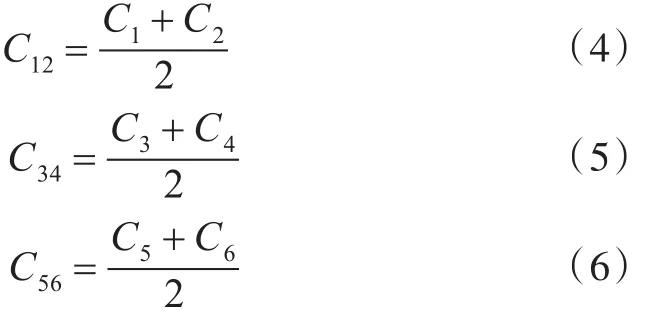
式中:C1為艏左吃水,m;C2為艏右吃水,m;C3為舯左吃水,m;C4為舯右吃水,m;C5為艉左吃水,m;C6為艉右吃水,m;C12為艏平均吃水,m;C34為舯平均吃水,m;C56為艉平均吃水,m。因此,艏艉吃水差T為

5.2.2 縱傾校正
由于船舶的排水量計算是以艏艉垂線間距離(LBP)為基礎進行的,排水量表一般是根據船舶呈平浮狀態制成,所以,船舶吃水的準確數值是艏垂線、艉垂線和LBP中點的吃水值,如圖6所示。當船艏、舯、艉水尺標志與其相應的艏垂線、舯垂線、艉垂線不在同一線上,且船舶呈縱傾時,必須利用水尺標志與垂線的距離、LBP等已知參數代入公式,算出艏、舯、艉吃水差的校正值。以船艏、船艉水尺修正為例,公式推導如下:
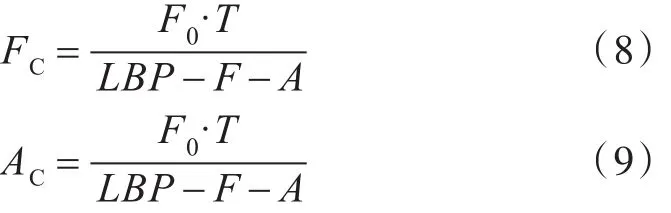
式中:F0為艏水尺標志到艏垂線的距離,m;A為艉水尺標志到艉垂線的距離;LBP為垂線間的長度,m;T為艏艉吃水差,m;FC為艏吃水校正值,m;AC為艉吃水校正值,m。
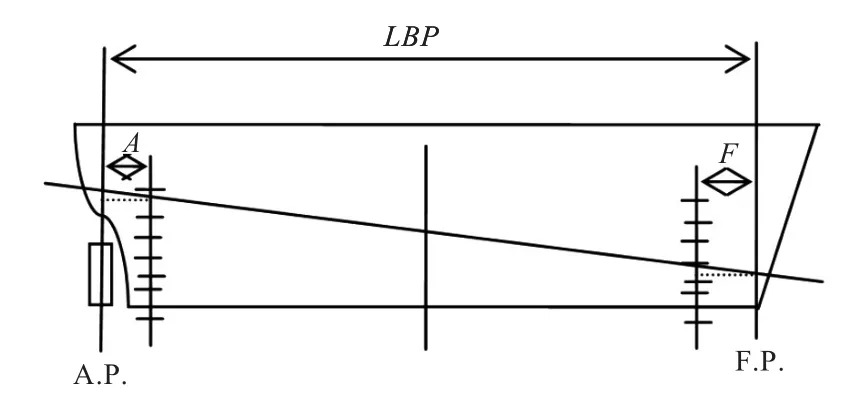
圖6 縱傾修正Fig.6 Trim correction
5.2.3 拱陷校正
拱是船體中部上拱,這時船舶甲板受到拉伸,船底受到擠壓;陷則是甲板受到擠壓,船底受到拉伸。拱陷值是船舶艏、艉吃水的平均值和船舯吃水平均值之差。不論船舶呈現的是拱還是陷,在計算船舶排水量時均為多算或少算因船體變形而導致的增加或減少的排水量,因此當船舶出現拱陷時,應進行拱陷校正。校正計算公式為

式中,TM為拱陷校正后的平均吃水,m。
綜上所述,由雷達水尺檢測器讀取的六面吃水經橫傾、縱傾及拱陷校正而計算得出平均吃水TM后可再據此查相應的排水量表。
5.3 排水量的計算
5.3.1 排水量的縱傾修正
船舶圖標上所列的排水量是根據船舶在不同吃水的平浮狀態下求得,當船舶處于縱傾狀態時,由于艏艉形狀不同,導致平浮到縱傾狀態的排水量不同,故必須對縱傾時的排水量進行修正。根本式校正公式[14]被驗證具有一定的準確性,故被國際上所接受并廣泛采用,公式如下:
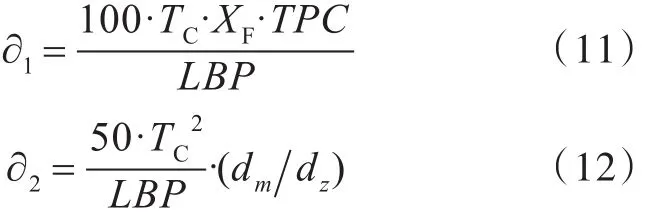
式中:?1為排水量的縱傾第1項校正值,t;TC為校正后的吃水差,m;XF為船舶漂心距船體中心的距離,m;TPC為拱陷校正后每厘米吃水噸數,t/cm;?2為排水量的縱傾第2項校正值,t;dmdz為縱傾力矩變化率,t/cm。
經過縱傾修正后的船舶的排水量為

式中:?0為平均吃水處的相應排水量,t;?修正為經校正后的排水量,t。
5.3.2 排水量的港水密度校正
船舶所處水域港水密度不同時,只要船舶載荷不變,則排水量保持不變,但是船舶的排水體積以及船舶吃水會隨港水密度的不同而發生變化。因此,當船舶處于不同密度的港水時,其排水量必須經港水密度校正,校正公式為

式中:?為港水密度校正后的排水量,t;ρ為船舶停泊海區海水的密度,g/cm3;ρ0為標準密度,一般取 ρ=1.025 g/cm3。
6 雷達液位計測量船舶吃水的應用
2017年4~7月,在舟山老塘山港區,對在此靠港卸貨的15船次國際船舶就其左側中間水尺安排了2組工作人員(一組手持雷達觀測器,另一組乘坐拖輪目測水尺)同時進行比對測量,目的是為了驗證雷達水尺檢測器的準確性及可靠性。為節約時間且使其具有代表性,在試驗過程中,盡可能選擇足夠多的船舶,且選擇對水尺計重影響最大的中間水尺讀數作為試驗對象。試驗開始前,安排工作人員用特制三腳架裝置固定雷達傳感器于甲板線的起始位置,每次雷達實際測量時間為300 s,計算有效數據的時間段控制在210~260 s之間,在用雷達觀測器檢測的同時,安排另一具有操作水尺計重資質的資深工作人員乘坐小船對船舶外擋中間水尺進行鑒定。目測水尺精度公制為0.01 m[13],雷達則為 0.001 m[15]。采用 2 種方法得到的結果如表1所示。
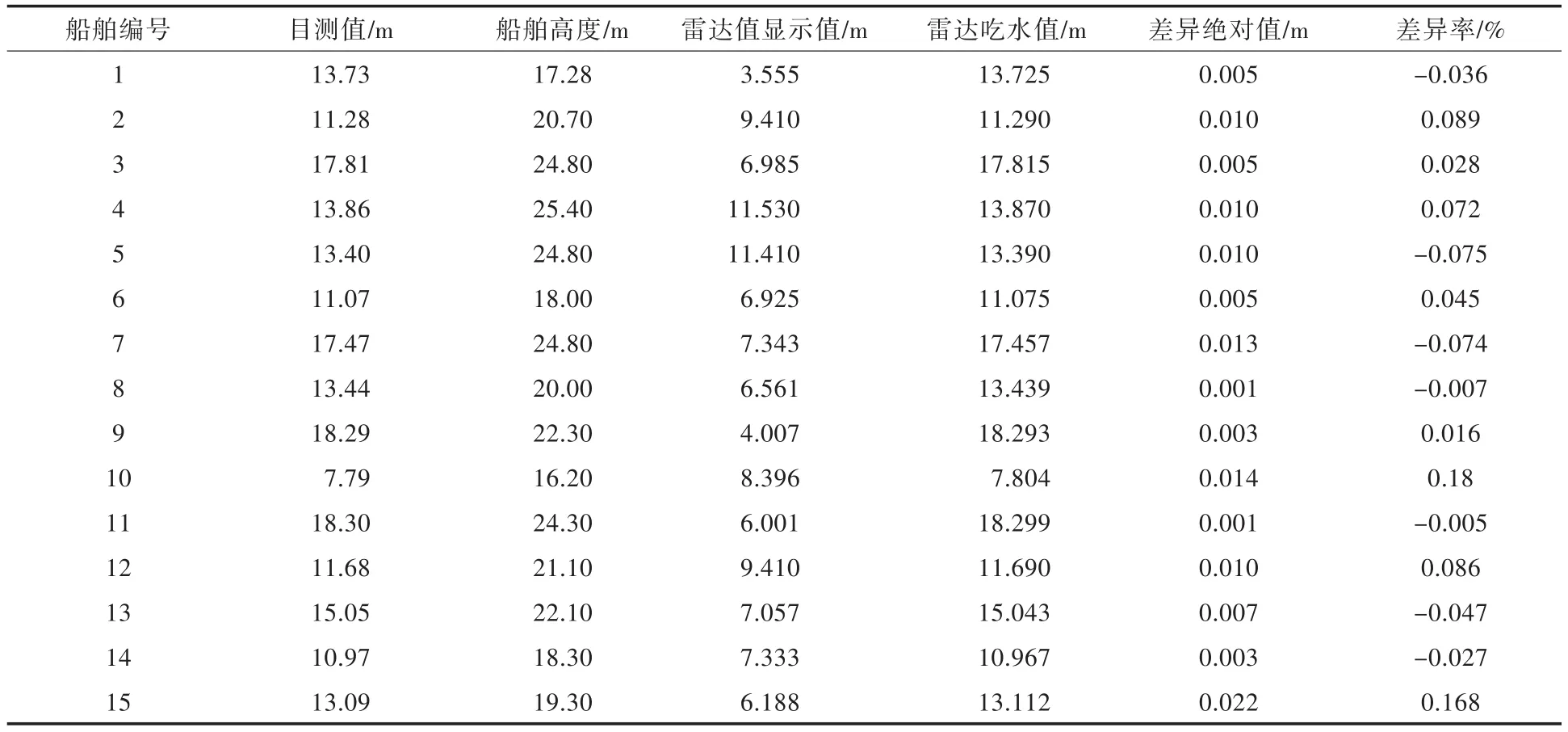
表1 雷達測量船舶吃水與人工目測方法數據比對Table 1 Data comparison between radar survey and manual visual method
雷達檢視水尺值較目測方式的差異率E為

式中:F為雷達檢視水尺值;G為目測檢視水尺值。
從表1可以看出,15船次國際船舶雷達檢視水尺較目測方式差異范圍在0.001~0.022 m之間,平均差異率為0.028%,符合設計之初對于誤差的預估值,也符合船舶制表的準確度在0.1%以內且水尺計重的準確度在0.5%以內[16]的要求。事實上,現在的雷達液位計測距技術可因測量精度及量程需求而量身選取滿足要求的傳感器,目前在石化行業使用的傳感器精度遠高于目測的精度。此外,本次試驗對15船次國際船舶的左側中間水尺進行了測量,同時依托水尺鑒定行業的資深專家對船舶該處水尺進行了目測檢視。經過兩者數據的比對,基本認為利用雷達液位測距技術檢測船舶吃水的方法可靠、準確。
7 結 語
針對目前船舶水尺計重中采用人工目測及少部分利用圖像處理技術檢視船舶吃水存在準確性差、可靠性不強、工作強度大等問題,利用成熟可靠的雷達液位測距技術,以靠港船舶為檢測對象,從固定支架、顯示及計算等部分對雷達水尺檢測裝置進行了重點設計,同時將開發成功的雷達水尺檢測裝置投入試驗。結果表明,使用該裝置檢測結果準確、可靠,而且它的投入使用較傳統的乘坐拖輪目測檢視船舶吃水方法至少可節省45 min,節約拖輪租用費1 000元/次,可有效促進港口船舶的快進快出,提高碼頭利用率,推動地方港口經濟更好發展。
[1]劉輝強.水尺計重及其誤差分析[D].大連:大連海事大學,2010.LIU H Q.Draft survey and errors analysis[D].Dalian:Dalian Maritime University,2010(in Chinese).
[2]陳文煒,俞汲,徐杰,等.一種船舶吃水測量系統[J].中國造船,2013,28(1):166-171.CHEN W W,YU J,XU J,et al.A new measurement system of ship draft[J].Shipbuilding of China,2013,28(1):166-171(in Chinese).
[3]馬曉波,杜柏松,戴冉.一種船舶吃水測量尺的設計[J].船海工程,2016,45(3):35-38.MA X B,DU B S,DAI R.Design of a ship's draft mea?suring ruler[J].Shipamp;Ocean Engineering,2016,45(3):35-38(in Chinese).
[4]冉鑫,彭將輝.基于圖像處理的船舶水尺刻度識別[J].上海海事大學學報,2012,33(2):6-9.RAN X,PENG J H.Ship draft mark recognition based on image processing[J].Journal of Shanghai Maritime University,2012,33(2):6-9(in Chinese).
[5]黎湘,范梅梅.認知雷達及其關鍵技術研究進展[J].電子學報,2012,40(9):1863-1870.LI X,FAN M M.Research advance on cognitive radar and its key technology[J].Acta Electronica Sinica,2012,40(9):1863-1870(in Chinese).
[6]劉冰.雷達液位計的測量原理與應用[J].廣州化工,2012,40(21):125-127.LIU B.Detection principle and application of radar lev?el meter[J].Guangzhou Chemical Industry and Tech?nology,2012,40(21):125-127(in Chinese).
[7]張鋒.船舶載重線及水尺標志勘劃出現不一致的釋疑[J].航海技術,2013(2):32-33.ZHANG F.The explanation of loadline and draft marks assigned inconsistent[J].Marine Technology,2013(2):32-33(in Chinese).
[8]羅婧,施朝健,冉鑫.一種視頻圖像船舶吃水線自動檢測方法[J].船海工程,2012,41(1):30-32,37.LUO J,SHI C J,RAN X.A new method for automatic detection of ship waterline[J].Shipamp;Ocean Engineer?ing,2012,41(1):30-32,37(in Chinese).
[9]郭秀艷.船舶水尺吃水值檢測方法研究[D].大連:大連海事大學,2014.GUO X Y.Research on detection method of ship draft[D].Dalian:Dalian Maritime University,2014(in Chinese).
[10]劉永翔,焦德義.某型船船體找線方法與工藝要求初探[J].造船技術,2015(6):55-57.LIU Y X,JIAO D Y.The primary investigation on structure line measurement and technological require?ment for a certain type of ship[J].Marine Technolo?gy,2015(6):55-57(in Chinese).
[11]陳亞飛,汪益兵.海運固體散裝貨物的水尺計重[J].航海技術,2010(3):36-38.CHEN Y F,WANG Y B.Discussion on the calcula?tion of draft survey in solid bulk cargoes[J].Marine Technology,2010(3):36-38(in Chinese).
[12]劉新建.船舶吃水檢測系統的研究[D].大連:大連海事大學,2016.LIU X J.Research on draft detection system of the ship[D].Dalian:Dalian Maritime University,2016(in Chinese).
[13] 劉揚睿.進出口商品鑒定專業基礎[M].北京:中國標準出版社,2007:151-188.
[14]胡競中,張明明,劉剛.船舶排水量快速計算方法[J].船海工程,2016,45(4):16-18,23.HU J Z,ZHANG M M,LIU G.A quick calculation method of vessel's displacement[J].Shipamp;Ocean Engineering,2016,45(4):16-18,23(in Chinese).
[15]張慶慶.導波雷達液位計測量技術研究[J].儀器儀表用戶,2017,24(3):23-27.ZHANG Q Q.Study on measurement of guided wave radar level gauge technology[J].Instrumentation,2017,24(3):23-27(in Chinese).
[16] 中華人民共和國國家進出口商品檢驗局.進出口商品重量鑒定規程水尺計重:SN/T0187-1993[S].北京:中國標準出版社,1994.
Application of ranging technique of radar level meter for draft survey
SHEN Yijun1,LI Bo2,WANG Penghao2
1 Zhoushan Entry-Exit Inspection and Quarantine Bureau,Zhoushan 316000,China
2 College of Marine Science and Technology,Zhejiang Ocean University,Zhoushan 316004,China
[Objectives]This paper aims to solve the problems of the high subjectivity and low accuracy and efficiency of draft surveying relying on human visual inspection.[Methods]Radar-level oil and liquid measurement technology products are widely used in the petrochemical industry.A device is developed that uses radar to survey the draft of a boat,designed with data series optimization formulae to ensure that the data results are true and correct.At the same time,a test is designed to prove the accuracy of the results.[Results]According to the conditions of the ship,the device is composed of a radar sensor,triangular bracket and display,and is put to use in the test.[Conclusions]With 15 vessels as the research objects,the comparison experiment shows a difference in range between 0.001-0.022 meters,with an average difference rate of 0.028%,which meets the requirements for ship draft survey accuracy.
radar level meter;ship draft;draft survey
U693.4
A
10.3969/j.issn.1673-3185.2017.06.020
http://kns.cnki.net/kcms/detail/42.1755.TJ.20171128.1108.020.html期刊網址:www.ship-research.com
沈益駿,李博,王鵬皓.雷達液位計測距技術在船舶水尺計重中的應用[J].中國艦船研究,2017,12(6):134-140.
SHEN Y J,LI B,WANG P H.Application of ranging technique of radar level meter for draft survey[J].Chinese Journal of Ship Research,2017,12(6):134-140.
2017-07-23 < class="emphasis_bold"> 網絡出版時間:
時間:2017-11-28 11:08
沈益駿,男,1982年生,工程師。研究方向:進口大宗散貨檢驗鑒定。
E-mail:240917869@qq.com
李博(通信作者),男,1985年生,博士,副教授。研究方向:海洋數值模擬。
E-mail:269671379@qq.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
