履帶自走式苜蓿切割壓扁機設計與試驗
2017-12-16 02:48:49趙建柱陳宏偉孫鳳濤王德成
農機化研究 2017年4期
關鍵詞:作業
趙建柱,孫 佳,陳宏偉,孫鳳濤,王德成
(中國農業大學 工學院,北京 100083)
?
履帶自走式苜蓿切割壓扁機設計與試驗
趙建柱,孫 佳,陳宏偉,孫鳳濤,王德成
(中國農業大學 工學院,北京 100083)
為適應西部地區苜蓿收獲的需要,研制了一臺履帶自走式苜蓿切割壓扁機。為此,進行了整機結構設計和總體布置,完成了零部件的選型、設計,并進行了樣機試制。該機采用靜液壓無級變速驅動橋,實現了無級調速,操控簡便。試驗結果表明:樣機爬坡度可達30%以上,最高作業速度可達10km/h,接地比壓29kPa,能夠較好地滿足山地苜蓿切割壓扁作業的需求。
苜蓿切割壓扁機;履帶;自走式;靜液壓無級變速
0 引言
近些年,國內外在平原地區已普遍使用大型拖拉機牽引幅寬較大的切割壓扁機對苜蓿進行收獲,效率高、效果好[1-2];而我國苜蓿主產區的甘肅、寧夏等西北地區,苜蓿多種植在山坡、丘陵地帶,地形復雜多變,加上苜蓿種植區域中田鼠、野兔等中小型嚙齒類動物巢穴較多,使用輪式機械收獲較為困難[3-4]。目前,山區丘陵地帶收割苜蓿主要采用手持式切割機或者小型割草機進行,雖然能夠完成收獲作業,但因為缺少壓扁環節,不能保證苜蓿莖葉同速干燥。在收儲運的過程中,苜蓿葉片脫落嚴重,致使蛋白質損失嚴重,減少了營養成分的含量,苜蓿草的品質不高;收獲作業效率低,人力成本高,影響了產業的發展[5-6]。
鑒于此,本文研制了一臺使用靜液壓無級變速驅動橋的履帶自走式苜蓿切割壓扁機,其結構簡單、質量小,具有較好的通過性和爬坡能力、可實現無級變速等優點,可以較大幅度提高苜蓿收獲效率,并能保證苜蓿干草料的品質[7]。
1 整機結構及工作原理
履帶自走式苜蓿切割壓扁機主要由切割壓扁工作裝置、發動機、靜液壓無級變速驅動橋、皮帶傳動裝置、懸架系統、液壓升降系統、油箱和車架等組成,如圖1所示。切割壓扁工作裝置前置;靜液壓無級變速圖驅動橋位于車架下側前端兩個驅動輪之間,前置驅動;發動機在車架后端縱置,動力直接從皮帶輪傳出。
履帶自走式苜蓿切割壓扁機作業時,行走部分與工作裝置共用同一套動力裝置,發動機通過皮帶輪帶動靜液壓無級變速驅動橋,為行走部分提供前進動力。作業時,發動機通過皮帶輪帶動切割器上的刀盤高速旋轉,苜蓿被高速旋轉的割刀切割后甩入調制器,并在上、下壓扁輥的擠壓下被壓扁、拋出,在草茬上鋪成具有一定寬度的草條。通過液壓系統控制工作裝置的升降可改變割茬高度,平行四連桿支架保證割刀角度不變。
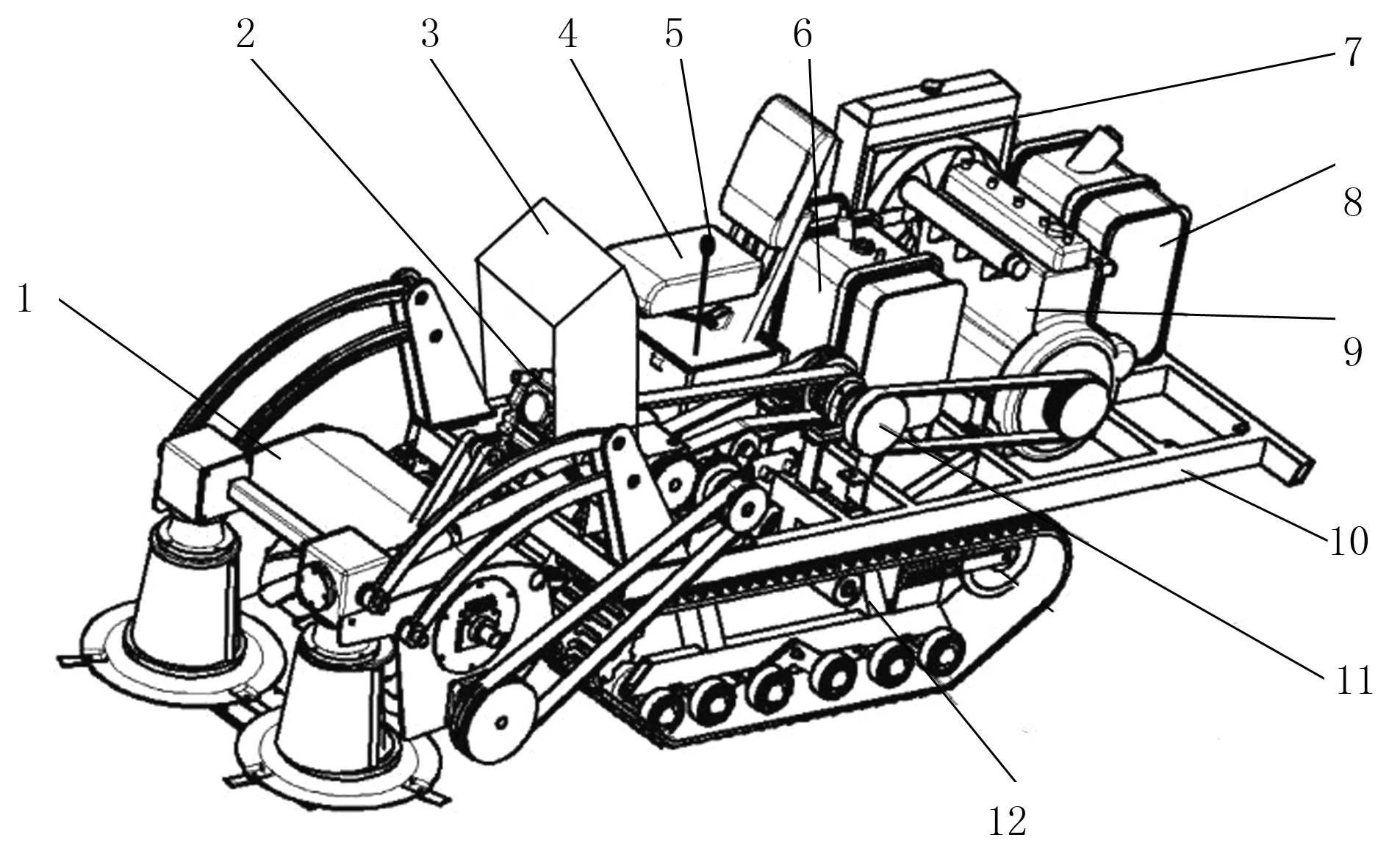
1.切割壓扁工作裝置 2.靜液壓無級變速驅動橋 3.儀表盤 4.座椅 5.操縱桿 6.燃油箱 7.散熱器 8.液壓油箱 9.發動機 10.車架 11.皮帶輪及傳動系統 12.懸架
2 主要技術參數及動力傳動系統設計
2.1 參數確定
根據地形和種植狀況確定切割壓扁機割幅l為1.2m,要求生產率θ=0.4hm2/h,則各參數計算如下[8-10]:
切割壓扁作業時,整機車速為
代入數據,最小工作車速為3.3km/h。
本切割壓扁機采用旋轉式割刀,刀盤邊緣線速度vg約為65m/s,刀盤半徑r為0.325m,則切割器轉速為
壓扁輥線速度約為整機前進速度的3.5~4倍,壓輥直徑d為0.225m,則壓扁輥工作轉速為
整機在工作過程中受到的行駛阻力分為內部行駛阻力和外部行駛阻力。其中,內部行駛阻力可換算成驅動輪上的摩擦阻力矩Mr,則
式中 Fk—切線牽引力;
rk—驅動輪的動力半徑;
Mk—驅動轉矩。
履帶車輛行駛時的外部阻力Ff1為
式中 b—履帶板寬度;
p—履帶支承段單位面積上承受的壓力;
z0—軌轍深度。
土壤單位面積上承受的壓力(即履帶接地比壓)為
所以
式中 L0—履帶接地長度;
Kc—土壤變形的內聚模量;
Kφ—土壤變形的內摩擦模量;
通常,n取0.3~0.4之間,Kc取5.77~11.42之間,Kφ取538.55~808.96之間[11]。代入數據,行駛阻力F1為4 575N。
履帶式車輛在轉向時的驅動功率大于正常行走時的驅動功率,一般是直線行駛功率的1.15~1.5倍,則行駛驅動功率最大消耗為
P1=1.15F1vmax/3600
取最高工作車速vmax為10km/h,計算得行駛驅動功率最大消耗P1為14.6kW。
根據旋轉式割草機切割功率消耗曲線,可得切割器消耗總功率P2=2.16kW,壓扁輥消耗總功率P3=2.58kW。升降機構不與行走驅動和工作裝置同時工作,在此不考慮升降機構功率分配問題。
整機匹配總功率為
取整機的效率θ=0.85,計算得整機匹配總功率[Pe]max為27.3kW。
2.2 主要技術參數
根據我國西北部山區、丘陵苜蓿種植地帶路面不平度、松軟度、坡度、寬度等實際情況,以及苜蓿種植狀態,結合苜蓿收獲作業的要求,確定了履帶的主要技術參數如表1所示。
在社會的科技發展中,一些新興學科常從某些相關學科借用一些詞匯并賦予新的意義內涵,而成為該學科的詞匯。例如,石油專業中的bit“鉆頭”被機械加工行業借用表示“切削刀”。
表1 履帶自走式苜蓿切割壓扁機主要技術參數
Table 1 The main technical parameters of crawler self-propelled alfalfa cutting and flattening machine
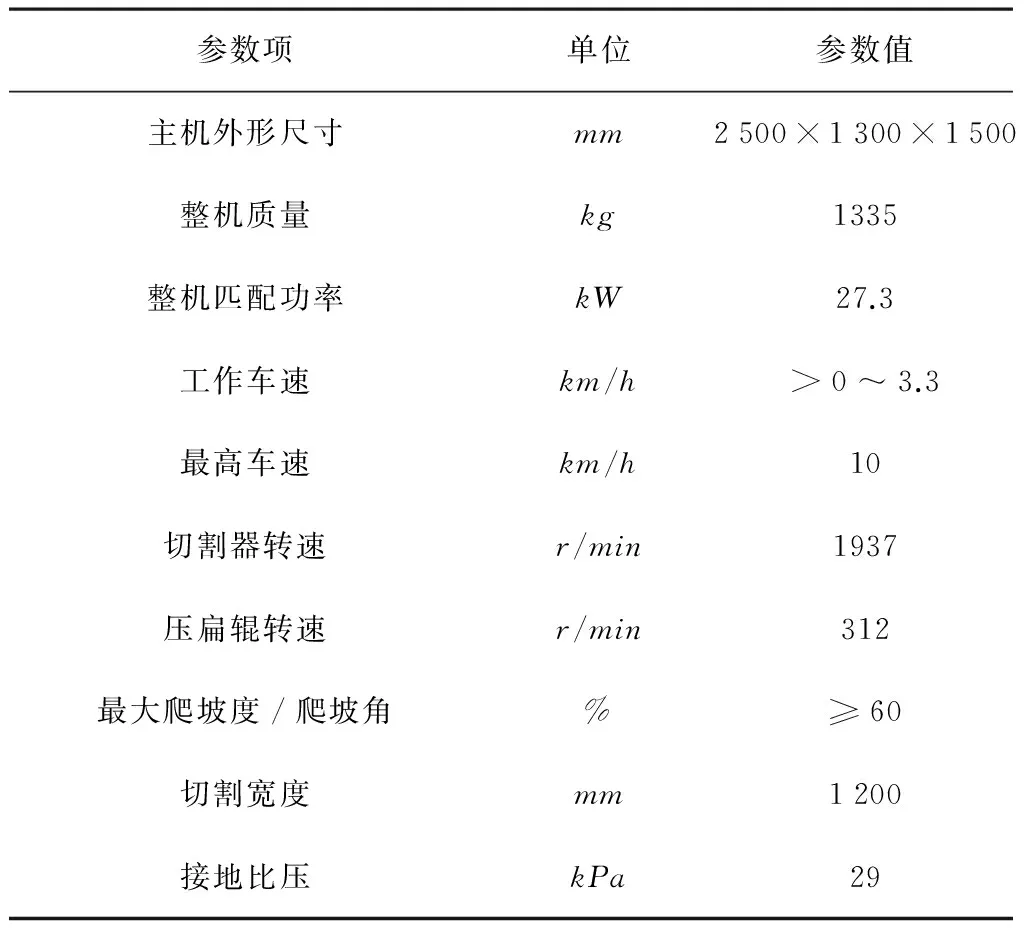
參數項單位參數值主機外形尺寸mm2500×1300×1500整機質量kg1335整機匹配功率kW27.3工作車速km/h>0~3.3最高車速km/h10切割器轉速r/min1937壓扁輥轉速r/min312最大爬坡度/爬坡角%≥60切割寬度mm1200接地比壓kPa29
2.3 傳動系統方案
本機采用三角帶將發動機動力分別傳遞給行走部分和工作裝置。
行走部分采用靜液壓無級變速驅動橋,通過驅動橋內的左右離合制動齒輪和左右驅動軸系上的傳動齒輪帶動左右驅動輪旋轉、制動,實現切割壓扁機前進、倒退、轉向和制動。
切割壓扁工作裝置動力傳遞路線,分為以下3部分:升降作業,即工作臺的升降;切割作業,即切割器旋轉割草部分;壓扁作業,即上下壓扁輥旋轉,如圖2所示。切割壓扁作業與舉升不是同時動作,因此分為兩套獨立的傳動路線。其中,工作裝置舉升部分通過液壓系統控制;切割壓扁部分的動力直接由發動機通過皮帶輪傳遞,經過分動機構分兩路輸出給壓扁輥旋轉動力和割刀切割旋轉動力。
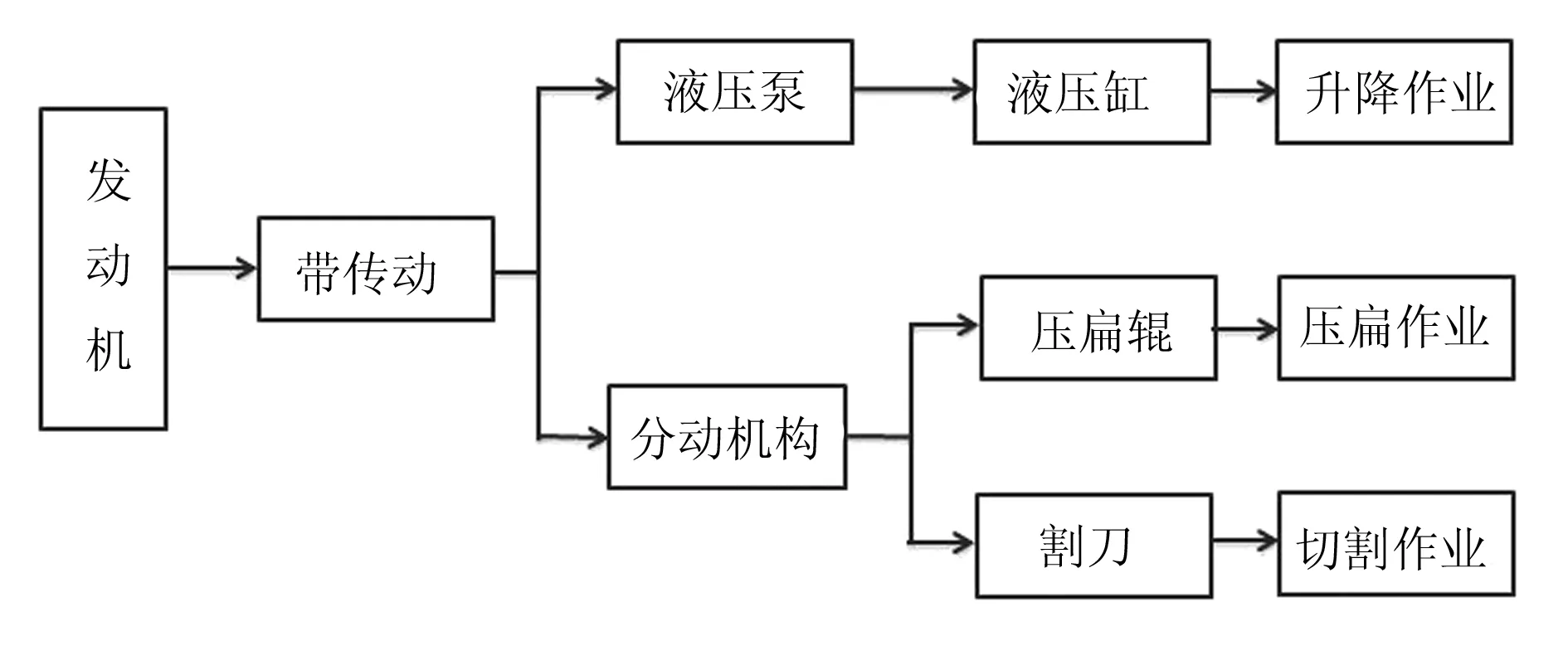
圖2 工作裝置傳動路線示意圖
2.4 行走驅動機構
由于作業環境復雜,外界負荷不斷地波動,因此車輛需要適時地變更轉速和轉矩以保證良好的動力性和經濟性。傳統變速箱雖能通過換檔達到一定的要求,但無法實現連續變化,而增加檔位會使變速箱結構復雜,成本增加,操縱困難。本機采用靜液壓-機械驅動是一種將靜液壓無級變速器(HST)與機械式驅動橋組合串聯的履帶動力底盤驅動方式,如圖3所示。這種驅動方式能夠實現無級變速,且操縱簡單,性能可靠,降低了整機成本。
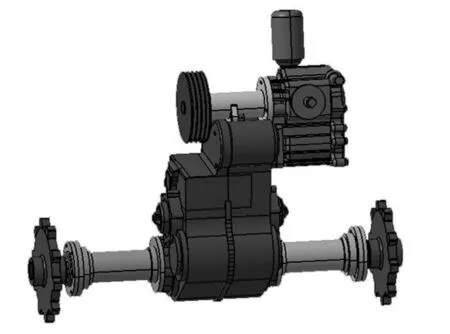
圖3 靜液壓無極變速驅動橋
靜液壓無級變速器是一個完整的閉式液壓系統,可實現整機在一定范圍內無級變速及負載換擋,主要由以下5部分組成:動力裝置,主要為液壓泵;執行元件,主要為液壓缸或者馬達;調節控制裝置,主要為壓力閥、流量閥和控制閥等;輔助裝置,主要包括各種管接頭、油管、油箱、過濾器及壓力表等;還有工作介質。
機械驅動橋具有兩個輸出軸,動力由發動機通過HST輸入,經由驅動橋內部中央傳動及離合制動器輸出給機械驅動橋輸出端,驅動整機行駛。機械驅動橋兩側輸出軸均配有離合制動器,可通過轉動耳軸帶動撥叉進行控制,實現行駛過程中驅動輪的差速、整機的轉向和制動。
3 樣機試驗
3.1 行駛及工作性能試驗
行駛及工作性能試驗在裸露苜蓿種植試驗田間進行,測試在不進行作業時的運輸車速及在工作裝置工作情況下的最高作業速度能否達到設計要求;測試啟動、制動性能是否正常可靠;測試各項操作是否靈活可靠;測試工作裝置工作狀況。
試驗結果表明:樣機在運輸(工作裝置不工作)工況下最高車速可達10km/h,作業(工作裝置工作)工況下最高車速可達3.3km/h,滿足設計要求;樣機啟動、制動性能良好,操縱靈活,工作裝置性能良好。

圖4 速度試驗現場
3.2 爬坡試驗
爬坡試驗在人工坡道進行,坡度30%。試驗采用角度測量儀測量,試驗結果顯示樣機爬坡度滿足設計要求,可在30%的坡道上正常行駛。

圖5 爬坡試驗現場
3.3 越障性能試驗
越障礙性能試驗在裸露苜蓿種植試驗田間進行,越障性能試驗現場設置長度約為0.8m、寬度為0.5m的地坑模擬動物巢穴。不同路面狀況下樣機能否正常行駛的試驗結果顯示:樣機可順利通過模擬巢穴,在多地洞路面行駛通過性良好,滿足設計要求。

圖6 越障性能試驗現場
4 結論
1)整機布置合理、結構緊湊、重心穩定,滿足山區苜蓿收獲作業要求。
2)采用靜液壓無級變速驅動橋,實現了無級調速,操作簡便,降低了勞動強度。
3)試驗表明:樣機有較好的越障礙通過性,爬坡度可達30%以上,最高作業速度可達10km/h,接地比壓29 kPa。
[1] 滕紹民. 自走式青飼收割機不分行割臺切割機理的研究
[D].北京:中國農業機械化研究院,2004.
[2] 楊世昆,蘇正范.飼草生產機械與設備[M].北京:農業出版社,2009.
[3] 戚志強,玉永雄,胡躍高,等. 當前我國苜蓿產業發展的形勢與任務[J].草業學報,2008(1):107-113.
[4] 羅亞蘭,趙春花,卞魯平,等. 山地牧草調制機關鍵設計參數確定與試驗研究[J].干旱地區農業研究,2014(5):266-270.
[5] 卜繁超,安向旗. 苜蓿干燥特點及推廣割草壓扁機的必要性[J].農業機械,2002(9):35.
[6] 孫啟忠,王宗禮,徐麗君.旱區苜蓿[M].北京:科學出版社,2014.
[7] 段天青,盛國成. 雙圓盤旋轉式割草機切割器的研究與設計[J]. 農業機械,2010(18):95-97.
[8] 陳志.農業機械設計手冊[K].北京:中國農業科學技術出版社,2007.
[9] 周一鳴.拖拉機理論[M].西安:西安交通大學出版社,1993.
[10] 安尼洛維奇,瓦達拉岑柯. 拖拉機的設計和計算[M]. 孔德堋,周紀良,譯.北京:中國農業機械出版社,1982.
[11] M G Bekker. Iintroduction to Terrain-Vehicle Systems(《地面—車輛系統導論》) [M]. 北京:機械工業出版社,1978.
Crawler Self-propelled Alfalfa Cutting and Flattening Machinary Design and Experimental Study
Zhao Jianzhu, Sun Jia, Chen Hongwei, Sun Fengtao, Wang Decheng
(College of Engineering, China Agricultural University, Beijing 100083, China)
In order to meet the requirements of alfalfa harvest of the western region,the paper developed a crawler self-propelled alfalfa cutting and flattening machinery.The whole structure design,general layout,parts selection and design,and prototype trial-production have been completed. Hydro static transmission has been used to achieve the variable speed and easy manipulation. The results showed that the maximum climbable gradient is 30%, the highest working speed is 10km/h,the ground specific pressure is 29 kPa. The prototype can meet the requirements of alfalfa working in mountainous region.
alfalfa cutting and flattening machinary; crawler;self-propelled;hydro static transmission
2016-03-18
公益性行業(農業)科研專項(201203024)
趙建柱( 1963- ),男,山東青島人,副教授,碩士生導師,(E-mail)zhjzh@cau.edu.cn。
王德成(1965-),男,吉林吉林人,教授,博士生導師,(E-mail)wdc@cau.edu.cn。
S817.11
A
1003-188X(2017)04-0103-04
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
