聯合收割機最短路徑設計——基于禁忌搜索和PID算法的
2017-12-16 08:01:39張曉云王麗娟
農機化研究 2017年8期
張曉云,王麗娟,熊 瓊
(1.綿陽職業技術學院,四川 綿陽 621000;2.焦作師范高等專科學校a.計算機與信息工程學院;b.計算機應用技術研究所,河南 焦作 454000;3.武漢工商學院 信息工程學院,武漢 430065)
?
聯合收割機最短路徑設計
——基于禁忌搜索和PID算法的
張曉云1,王麗娟2a,2b,熊 瓊3
(1.綿陽職業技術學院,四川 綿陽 621000;2.焦作師范高等專科學校a.計算機與信息工程學院;b.計算機應用技術研究所,河南 焦作 454000;3.武漢工商學院 信息工程學院,武漢 430065)
為了提高聯合收割機的收割效率和自動化作業能力,使其在復雜地塊具有智能路徑規劃功能,提高收割機作業的自適應能力,提出了一種基于禁忌搜索的智能聯合收割機自動路徑規劃優化方案,并采用PID反饋調節控制算法,來降低算法的誤差;建立了聯合收割機智能搜索的禁忌算法模型,并設計了積分、微分和比例調節的PID控制模型;最后利用實地和軟件測試的方法對算法的可行性和可靠性進行了測試。結果表明:利用禁忌搜索的PID控制算法可以有效地縮短路徑規劃時間,提高算法的精度,從而驗證了算法在收割機智能控制上應用的可行性。
聯合收割機;路徑規劃;自適應;禁忌搜索;PID算法
0 引言
隨著現代農業技術的發展,迫切的要求聯合收割機具有較高的收割效率和較好的自動化作業能力。由于人工智能技術的進一步發展,計算機技術和控制理論技術的聯系越來越密切,近幾年來研究的一些控制系統可以自動地對路徑最優問題進行求解,并且利用智能算法來優化作業目標的搜索問題。禁忌搜索算法是路徑規劃和調度的一種較好的方法,而PID控制算法可以利用負反饋調節的方法實現控制系統的優化。本文結合禁忌搜索算法控制系統的基本原理,使用實驗測試和軟件仿真等方法對聯合收割機的智能路徑規劃功能進行了深入研究,對于現代聯合收割機控制系統的開發具有一定的現實意義。
1 聯合收割機搜索算法和路徑規劃
聯合收割機路徑的優化是對一系列的收割目標點進行優化的過程,確定合適的路徑,使收割機以最快的速度對目標點進行收割,是路徑搜索算法首先需要解決的問題。路徑規劃問題如圖1所示。收割機的路徑規劃問題可以描述為有一定數量的收割目標,每個目標的收割量不同,目標的位置和收割量是確定的,由一個收割機車隊負責收割任務,每個收割機的作業量和到達距離是一定的,通過路徑規劃可以使收割路徑最短,同時滿足要求條件。禁忌搜索算法是一種全局搜索算法,該方法通過求解一個初始解,然后在鄰域中搜索最佳解或者移動到較差區域搜索最佳解,并對搜索的路徑進行記錄,在下次搜索時禁忌表中的目標點。流程如圖2所示。
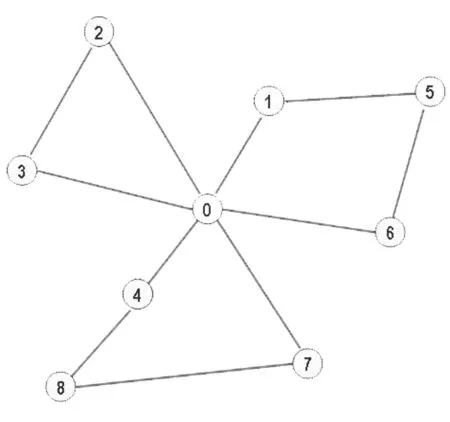
圖1 收割機路徑規劃問題
禁忌搜索算法的規劃流程主要根據禁忌屬性,對最優解不斷更新,從而得到最優路徑。首先利用啟發算法得到初始解,然后對初始解進行禁忌搜索。其具體步驟如下:
1)利用直接排列解。首先,構建路徑優化的初始解,隨機生成不重要的路徑;然后,按照約束條件,依次將解送入優化路徑中,從而產生路徑的初始化解;最后,通過求解目標函數,得到路徑的總和。
2)對兩個路徑的收割量進行隨機交換領域解,將n(n-1)/2個客戶進行排列,然后按照約束提交,重新計算目標函數。
3)通過對領域解的評價來更新禁忌表。如果候選的目標解比當前的最優解更優,則將該解確定為當前解;否則,判斷該解是否被禁忌,更新禁忌表。
4)如果候選解都被禁忌,則計算結束。
5)選出合適的路徑優化方案。
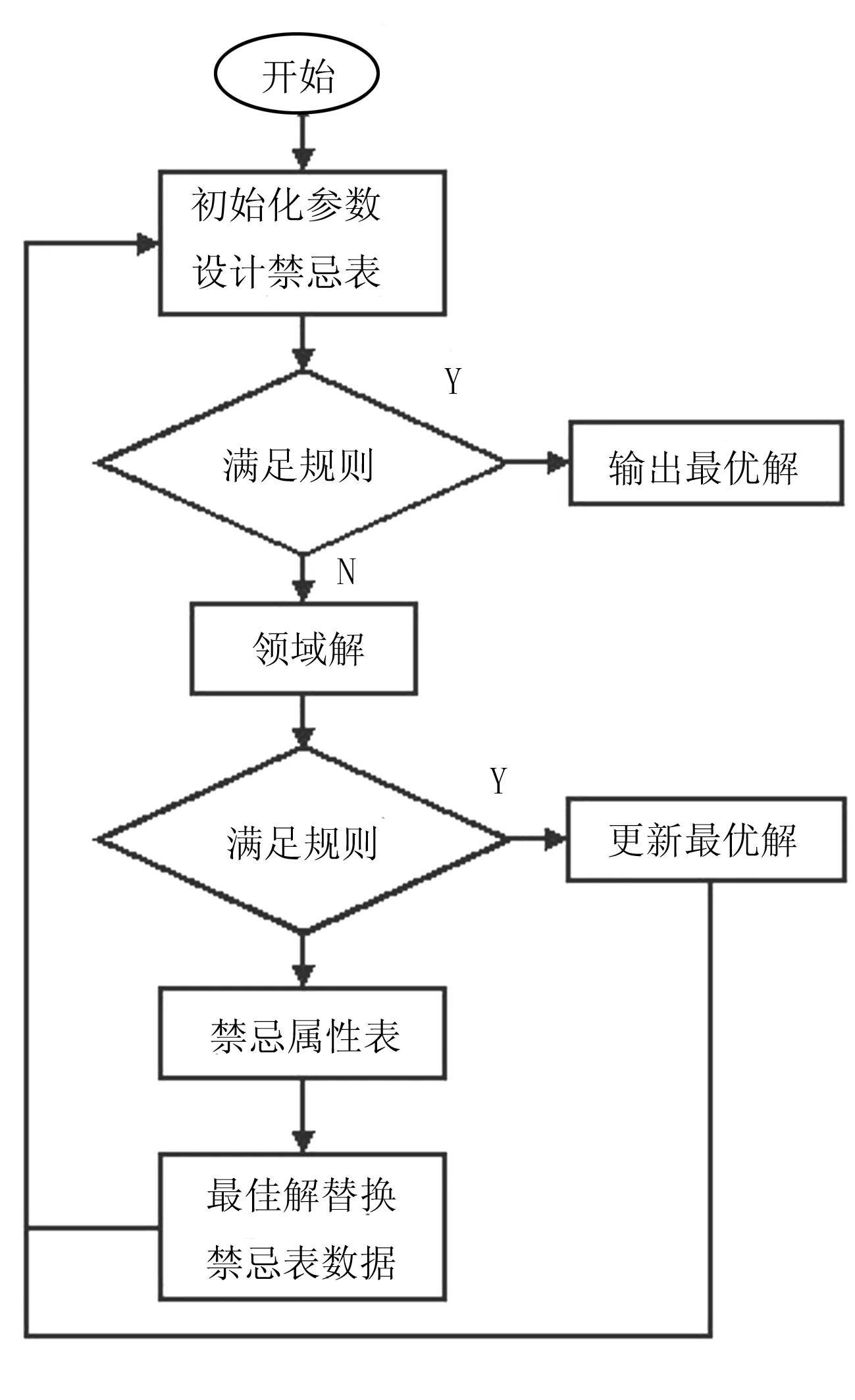
圖2 禁忌搜索路徑規劃流程
2 基于PID控制算法的自動控制系統優化
PID控制算法是自動控制系統最常用的控制算法之一,在系統中增加PID校正器后,可以通過微分方程的調節、零點和極點的調節來改善系統的性能,包括比例調節、比例微分調節、積分調節和比例微分積分調節。采用比例調節的傳遞函數為
Gc(s)=Kp
(1)
其中,KP表示比例調節系數。當比例調節作用于自動控制系統時,系統的特征方程可以表述為
Ds=1+KpG0(s)H(s)=0
(2)
其中,G0(s)表示傳遞函數;H(s)表示調節函數。
圖3表示對收割機自動控制系統進行比例調節的線性系統結構。
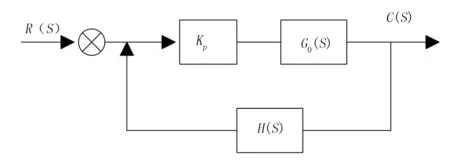
圖3 比例調節示意圖
當改變比例調節系數KP的大小時,系統的響應速度會發生改變。這是由于閉環系統的極點發生了改變,可有效地提高系統的精度,但同時會對系統的穩定性造成影響。因此,需要結合微分調節來進一步對系統進行校正,比例微分調節的傳遞函數模型可寫成
Gc(s)=Kp+KDs
(3)
其中,KD表示微分調節系數。
控制器的信號可以表示為
(4)
原系統的開環傳遞函數為
(5)
其中,wn表示系統頻率;ζ表示系統阻尼。
串入PD控制器后系統的開環傳遞函數
(6)
由PD控制器的表達式可以看出:利用PD控制相當于在傳遞函數上增加了一個零點,該零點在負的實軸上,其表達式為s=-KP/KD。積分函數的表達式為
(7)
其中,KI表示積分系數。引入比例控制后,其傳遞函數可以表示為
(8)
由PI控制器的表達式可以看出:利用PI控制相當于在傳遞函數上增加了一個零點,該零點在負的實軸上,其表達式為s=-KI/KP,從而可以使系統得到合適的零點。對比例調節、微分調節和積分調節進行疊加可得
(9)
PID控制可以提供一個極值點和兩個零點,從而可以全面的提高系統的動態性能。式(9)可以改寫為
(10)
(11)
在實際工作時比較難實現微分環節, 因此加了一個慣性項,只要比例、積分和微分調節配合的合理,就可以實現較好的控制效果。
3 聯合收割機路徑規劃測試
為了驗證禁忌搜索PID控制算法在聯合收割機自動路徑規劃中的作用,利用單片編程技術將該算法嵌入到了聯合收割機智能控制臺上,并對收割機進行實地測試,如圖4所示。

圖4 收割機作業圖
為了使測試具有普遍意義,作業目標選擇多樣化,并且選取數目不同的目標進行規劃,選取的目標數目分別為5、10、15個,選擇的地塊形狀如圖5所示。

圖5 測試地塊形狀
在測試地塊上選擇作業目標進行路徑規劃,根據目標距離的長短,使用禁忌算法對目標進行規劃。為了降低算法的誤差,采用PID算法進行編程,通過對反饋信號的控制,提高系統的精度。通過測試得到了如圖6所示的路徑搜索曲線。
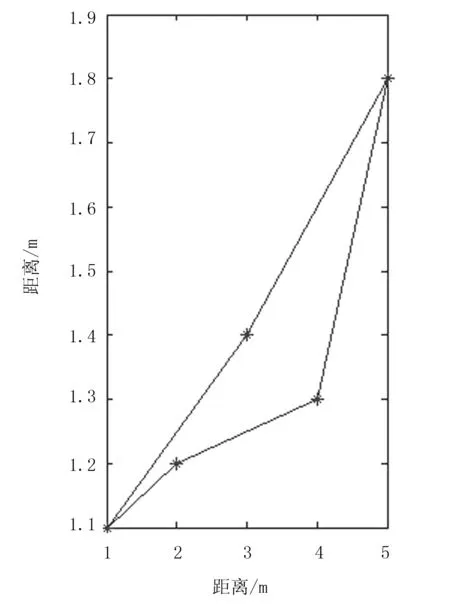
圖6 5個目標點路徑搜索規劃結果
由圖6可以看出:為了在最短距離內完成作業目標,直接采用1臺收割機從出發地點出發,收割完成后正好返回出發地即可。
圖7表示目標點數為10個時的路徑搜索規劃結果曲線。由圖7可以看出:為了在最短距離內完成作業目標,需要采用3臺收割機。其中,1臺作業完成后正好回到起始地點,另外兩臺收割機收割完成后在同一結束點。
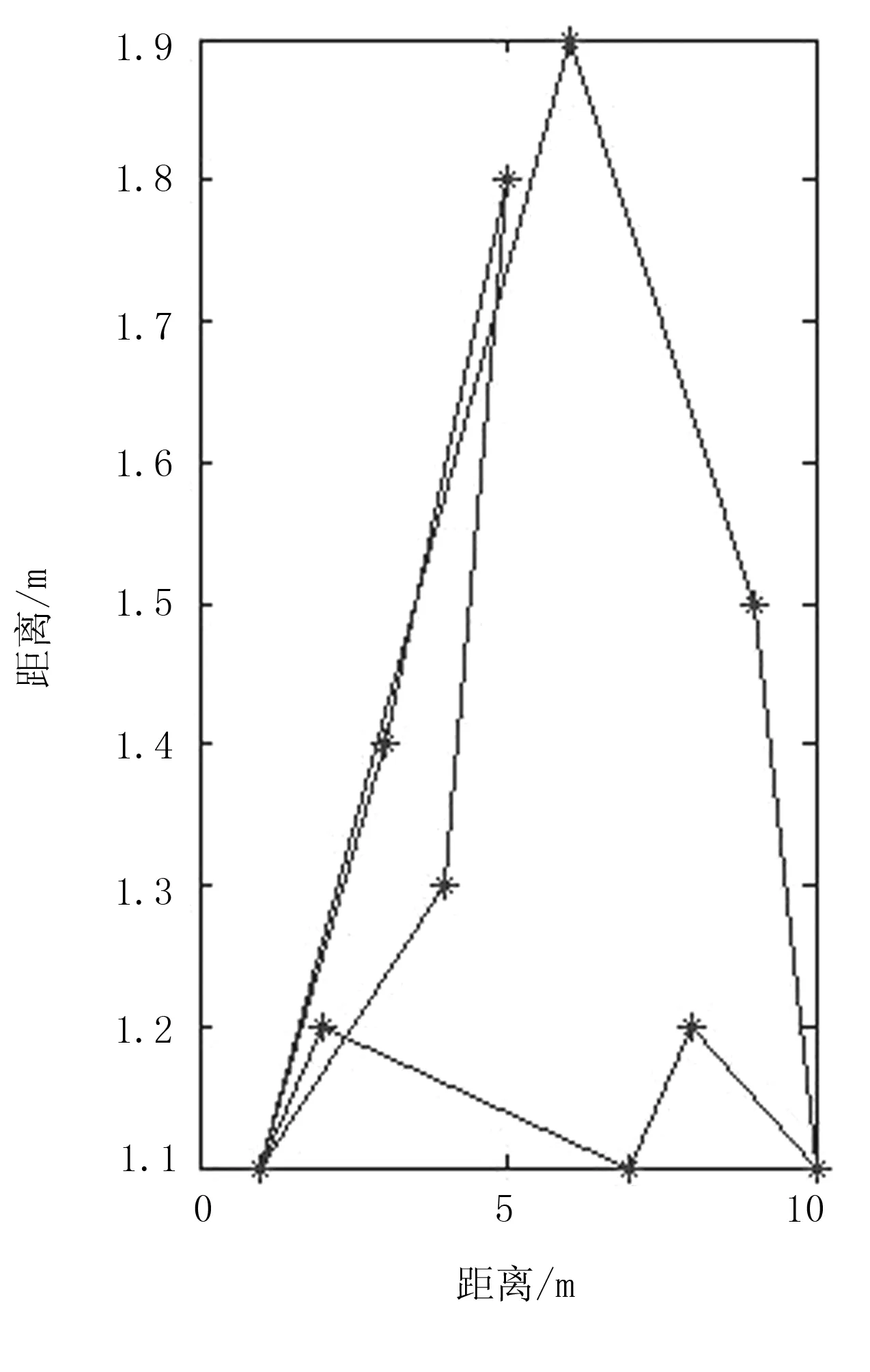
圖7 10目標點路徑搜索規劃結果
圖8表示目標點數為15個時的路徑搜索規劃結果曲線。由圖8可以看出:為了在最短距離內完成作業目標,需要采用3臺收割機,3臺收割機作業完成后正好回到起始地點。
為了驗證算法的有效性,對收割機的作業時間進行了測試和統計,得到了如表1所示的時間對比結果。由表1可以看出:采用禁忌搜索PID算法要比PID算法節省大量的時間。
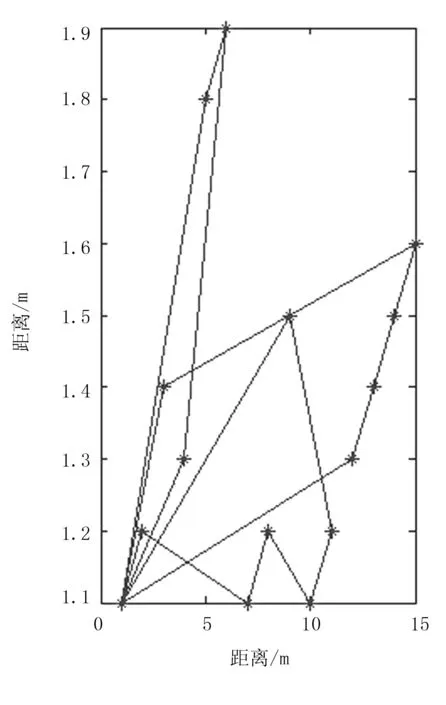
圖8 15個目標點路徑搜索規劃結果

實驗編號PID算法時間/s禁忌搜索PID算法時間/s15.282.1225.362.3135.122.1145.222.1855.312.2665.322.31
為了進一步驗證算法的可靠性,統計了算法實現過程的迭代誤差,迭代次數曲線如圖9所示。由圖9可以看出:使用禁忌搜索PID算法具有更快的收斂速度,而收斂誤差也明顯降低,從而驗證了該算法在收割機上使用的可行性。
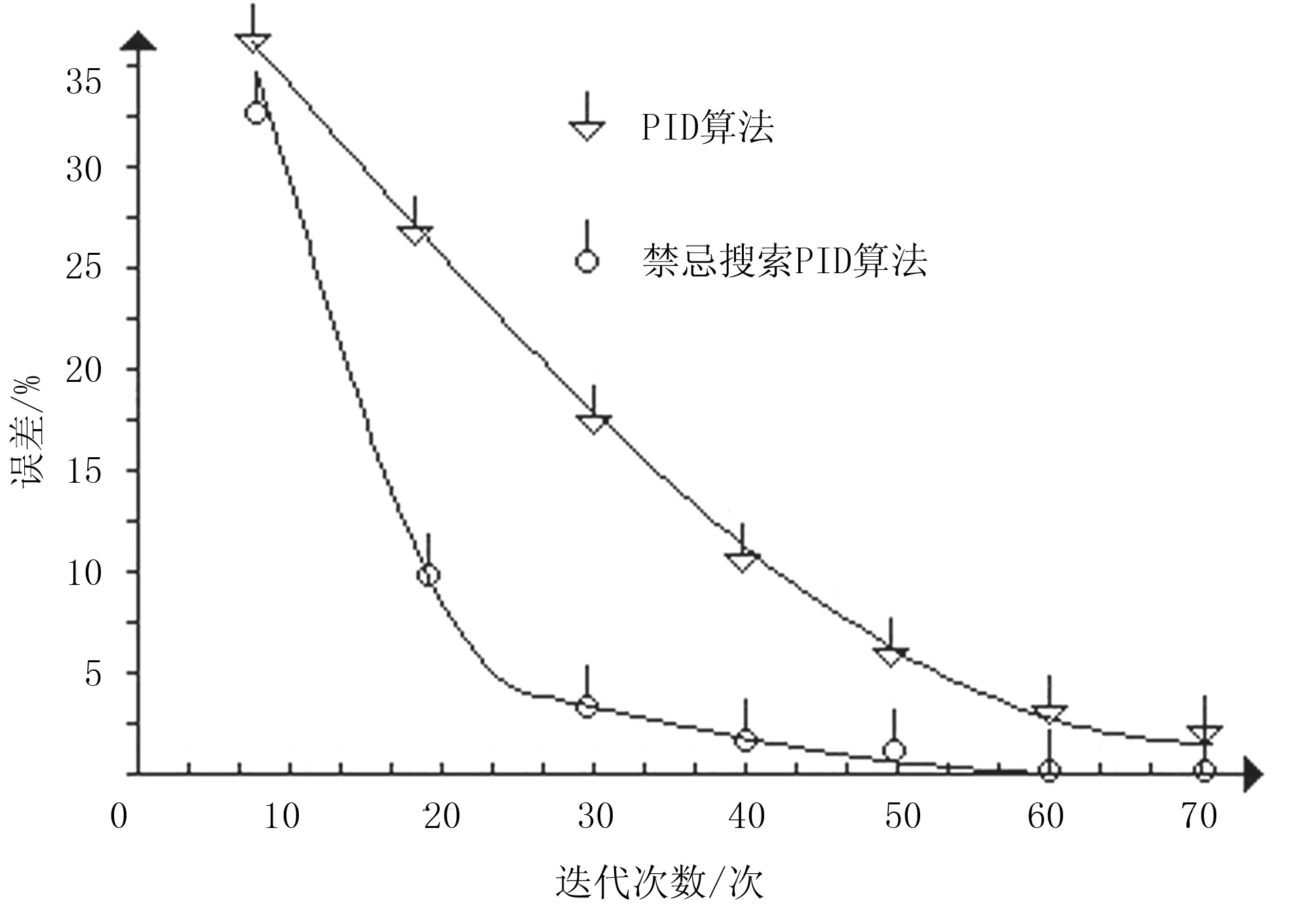
圖9 迭代計算次數曲線
4 結論
基于禁忌搜索算法,提出了一種聯合收割機路徑優化的PID控制模型,并利用單片機編程技術設計了聯合收割機的智能路徑規劃控制平臺,有效地提高了聯合收割機的作業效率和智能化程度,提高了收割機的作業地塊的適應能力。對禁忌搜索算法和PID控制的模型進行了實驗測試和軟件仿真,結果表明:使用禁忌搜索PID算法可以有效地縮短路徑規劃距離,提高搜索效率, 在較少的迭代步數情況下提高系統的精度。
[1] 陳科尹,鄒湘軍,熊俊濤,等.基于視覺顯著性改進的水果圖像模糊聚類分割算法[J].農業工程學報,2013,29(6):157-165.
[2] 王文慶,張濤,龔娜.基于多傳感器融合的自主移動機器人測距系統[J].計算機測量與控制,2013,21(2): 343-345.
[3] 郭艾俠,鄒湘軍,朱夢思,等.基于探索性分析的荔枝果及結果母枝顏色特征分析與識別[J].農業工程學報,2013,29(4):191-198.
[4] 項榮,應義斌,蔣煥煜.田間環境下果蔬采摘快速識別與定位方法研究進展[J].農業機械學報,2013,44 (11):208-223.
[5] 魏澤鼎,賈俊國,王占永.基于視覺傳感器的棉花果實定位方法[J].農機化研究,2012,34(6):66-68,112.
[6] 李立君,李昕,高自成,等.基于偏好免疫網絡的油茶果采摘機器人圖像識別算法[J].農業機械學報,2012,43(11):209-213.
[7] 王輝,毛文華,劉剛,等.基于視覺組合的蘋果作業機器人識別與定位[J].農業機械學報,2012,43(12): 165-170.
[8] 袁挺,紀超,陳英,等.基于光譜成像技術的溫室黃瓜識別方法[J].農業機械學報,2011,42(S1):172-176.
[9] 熊俊濤,鄒湘軍,陳麗娟,等.采摘機械手對擾動荔枝的視覺定位[J].農業工程學報,2012,28(14):36-41.
[10] 呂繼東,趙德安,姬偉,等.采摘機器人振蕩果實動態識別[J].農業機械學報,2012,43(5):173-196.
[11] 王新亞.基于MEA-BP神經網絡的主汽溫控制系統的研究[J].山西焦煤科技,2009(3):13-15.
[12] 王亞斌.基于BP神經網絡PID控制及其仿真[J].江蘇冶金報,2008,36(2):33-25.
[13] 馬平,朱燕飛,牛征.基于神經網絡的主汽溫控制系統[J].華北電力大學學報,2001,28(2):52-55.
[14] 王輝,毛文華,劉剛,等.基于視覺組合的蘋果作業機器人識別與定位[J].農業機械學報,2012,43(12):165-170.
[15] 李寒,王庫,曹倩,等.基于機器視覺的番茄多目標提取與匹配[J].農業工程學報,2012,28(5):168-172.
[16] 李立君,李昕,高自成,等.基于偏好免疫網絡的油茶果采摘機器人圖像識別算法[J].農業機械學報,2012,43(12):209-213.
[17] 錢建平,楊信廷,吳曉明,等.自然場景下基于混合顏色空間的成熟期蘋果識別方法[J].農業工程學報,2012,28(17):137-142.
[18] 顧寶興,姬長英,王海青,等.智能移動水果采摘機器人設計與試驗[J].農業機械學報,2012,43(6):153-160.
[19] 王海青,姬長英,顧寶興,等.基于機器視覺和支持向量機的溫室黃瓜識別[J].農業機械學報,2012,43(3):163-167.
[20] 蔡晉輝,才輝,張光新,等.復雜環境下自動導引車路徑識別算法[J].農業機械學報,2011,42(10):20-24, 89.
[21] 劉金帥,賴惠成,賈振紅.基于YCbCr顏色空間和Fisher判別分析的棉花圖像分割研究[J].作物學報, 2011,37(7):1274-1279.
[22] 朱群峰,黃磊.溫室移動機器人軌跡控制系統的設計[J].農機化研究,2009,31(4):73-75.
The Shortest Path Design of Combine Harvester——Based on Tabu Search and PID Algorithm
Zhang Xiaoyun1, Wang Lijuan2a,2b, Xiong Qiong3
(1.Mianyang Polytechnic,Mianyangg 621000, China; 2.Jiaozuo Teachers College,a.School of Computer and Information Engineering, b.Institute of Computer Applied Technology, Jiaozuo 454000,China; 3.School of Information Engineering,Wuhan Technology and Business University,Wuhan 430065, China)
In order to improve the intelligent path planning efficiency and automation of the production capacity in the combine harvester in complex plots, improve the adaptive capacity of the harvester, it proposed a tabu search of intelligent combine automatic path planning based on optimization scheme. By using PID feedback control algorithm, it can reduce the computational error. It established the combine intelligent search of tabu algorithm model, and it tested the design of the integral and derivative and proportional adjustment of PID control model and the field and software testing method of the algorithm feasibility and reliability. Test results show that the PID control algorithm can effectively shorten the path planning and improve the accuracy of the algorithm, which proves the feasibility of the algorithm in the intelligent control of the harvester.
combine harvester; path planning; self adaptation; tabu search; PID algorithm
2016-05-05
四川省教育廳科技項目(13ZB0388 );河南省高等學校青年骨干教師項目(2012GGJS-288);武漢工商學院科學研究項目(A2016010)
張曉云 (1968-),女,四川眉山人,副教授,碩士,(E-mail)xiaoman1972@sina.com。
熊 瓊(1981-),女,湖北鄂州人,講師,碩士,(E-mail)joanxiong@foxmail.com。
S225.3;TP393
A
1003-188X(2017)08-0053-05
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
公民與法治(2020年11期)2020-07-25 02:02:06
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
