2ZBX-4型吊杯式蔬菜移栽機的研究與設計
2017-12-16 08:01:44吳彥強王文莉侯加林
農機化研究 2017年8期
吳彥強,王文莉,侯加林
(1.山東農業大學 機械與電子工程學院,山東 泰安 271018; 2.山東省農機機械安全監理站,濟南 250013)
?
2ZBX-4型吊杯式蔬菜移栽機的研究與設計
吳彥強1,王文莉2,侯加林1
(1.山東農業大學 機械與電子工程學院,山東 泰安 271018; 2.山東省農機機械安全監理站,濟南 250013)
針對我國當前蔬菜移栽機存在的栽植質量差的問題,設計了2ZBX-4型吊杯式蔬菜移栽機,闡述了該機工作原理并分析了工作過程。使用時由拖拉機牽引,人工投苗,可實現半自動化移栽,通過更換從動鏈輪可對株距進行調節。對2ZBX-4型吊杯式蔬菜移栽機進行了田間試驗,結果表明:栽植株距和移栽深度穩定,可以進行多種蔬菜的移栽,損傷率、漏栽率低,直立度好,工作效率高,能滿足不同地區、不同蔬菜的移栽農藝要求。
蔬菜移栽機;吊杯式;穴盤苗;牽引式
0 引言
我國是世界上最大的蔬菜生產國和消費國,蔬菜產量占世界總產量的60%左右[1-2]。蔬菜在我國種植業結構中的地位也逐年上升,其播種面積(不含瓜類)由1978 年的333.10萬hm2增長到2013 年的2 089.94 萬hm2,占農作物播種總面積的12.7%,僅次于水稻、小麥、玉米等大宗糧食作物,產量也于2013 年達到7.35 億t[3-4]。然而,蔬菜產業是一項勞動密集型產業,蔬菜栽植與收獲成本占蔬菜生產總成本的2/3以上。因為育苗移栽技術不但具有對氣候的補償作用和使蔬菜生育期提早的綜合效應,還能提高單產[5],所以當前國內蔬菜栽植多采用育苗移栽作業方式,主要有傳統人工栽植方式與機械化移栽方式。傳統人工栽植方式移栽效率低,勞動強度大,移栽株距不均勻,移栽深淺度不一,造成移栽質量差、成活率低。應用蔬菜移栽機械化技術可減輕蔬菜移栽作業勞動強度,提高移栽作業質量和效率,具有省勞動力、省工時、高效率、低成本的優點。為減輕勞動強度、降低生產成本、提高生產效率和作業質量,實現蔬菜栽植機械化已成為我國農業生產的迫切需要和蔬菜產業發展的必然趨勢[6-7]。
歐美等國家對移栽機的研究起步較早,設計出種類多樣的半自動移栽機與全自動移栽機。按動力來源方式分為電機驅動、純機械驅動及機、電、液、氣混合的方式;按栽植器形式不同分為鉗夾式、導苗管式、吊籃式及帶夾圓盤式;也有針對不同面積應用的單行及多行寬幅作業機型,如穴盤苗移栽機、壓縮基質苗自動移栽機[5,8]。我國對移栽機的研究起步比較晚,開始于引進國外的各種型式的移栽機,不同型式的移栽機有其各自的特點。總體來說,當前我國現有移栽機的機械化與自動化水平比較低,移栽質量差、可靠性不高,亟需一種通用型蔬菜作物移栽機,要求其工作平穩、可靠,移栽后的秧苗整齊、株距穩定、直立度好、傷苗率低、工作效率高。
本文針對當前我國移栽機械存在的問題研制了2ZBX-4型吊杯式蔬菜移栽機,其栽植株距和移栽深度穩定,栽植株距、行距及栽植深度等參數可調,適用于辣椒、白菜、西紅柿、西蘭花等多種蔬菜秧苗的移栽。其與人工作業相比,工作效率高,損傷率和漏栽率低,直立度好,一次完成4行蔬菜移栽,為我國蔬菜產業發展提供了重要的技術裝備支撐。
1 整體方案設計及主要技術指標
1.1 整體設計
2ZBX-4型吊杯式蔬菜移栽機主要由機架、三點懸掛裝置、地輪、傳動系統、座椅、穴盤苗架、移栽單體及覆土鎮壓輪等組成,如圖1所示。使用時,采用29.4kW以上拖拉機牽引,4個移栽單體同時工作,一次完成4行移栽作業,每個移栽單體由投苗杯安裝架、投苗杯、箱體及栽植裝置等組成。4個移栽單體交錯排列,以使移栽后相鄰兩行秧苗間隔排列,獲得充足的生長空間。

1.機架 2.穴盤架 3.座椅 4.三點懸掛機構 5.投苗杯安裝架 6.投苗杯 7.箱體 8.覆土鎮壓輪 9.栽植裝置安裝架 10.地輪 11.栽植裝置 12.傳動鏈條 13.主軸 14.栽植深度調節絲杠
1.2 工作過程
移栽機通過三點懸掛機構與拖拉機掛接,在拖拉機的帶動下,地輪轉動并通過鏈條傳動將動力傳動至主軸,主軸通過鏈輪鏈條分別驅動4個移栽單體上的栽植裝置轉動;栽植器主軸通過鏈輪鏈條驅動移栽單體上方的一對錐齒輪轉動,進而帶動投苗杯的旋轉,投苗杯的開合由安裝在箱體上方的導軌控制。
在移栽作業開始前,需要先對要進行移栽的土壤起壟作畦。作畦后,地表土壤松軟、平整且排水良好,增加了種植層的厚度,便于移栽及覆蓋地膜。移栽時,首先將育好的帶有秧苗的穴盤放在左右穴盤架上,由人工從苗架取苗并投入旋轉的投苗杯中;穴盤苗被投入到投苗杯后,投苗杯旋轉至正前方時,投苗杯底座打開;此時栽植器承接杯運行至投苗杯正下方,穴盤苗恰好落入承接杯中,待承接杯運行至最下方時鴨嘴打開,穴盤苗在重力作用下落到穴坑內;隨后覆土鎮壓輪進行覆土和填壓,完成栽植過程。
1.3 主要技術指標
按照旱田蔬菜的種植模式與農藝要求,確定本機的主要技術參數指標如表1所示。
表1 2ZBX-4型吊杯式蔬菜移栽機技術參數
Table 1 Main performance parametersanter of the 2ZBX-4 cup vegetable transplanting machine

參數單位數值整機尺寸(長×寬×高)mm1500×2500×1400配套動力kW≥29.5作業方式牽引式
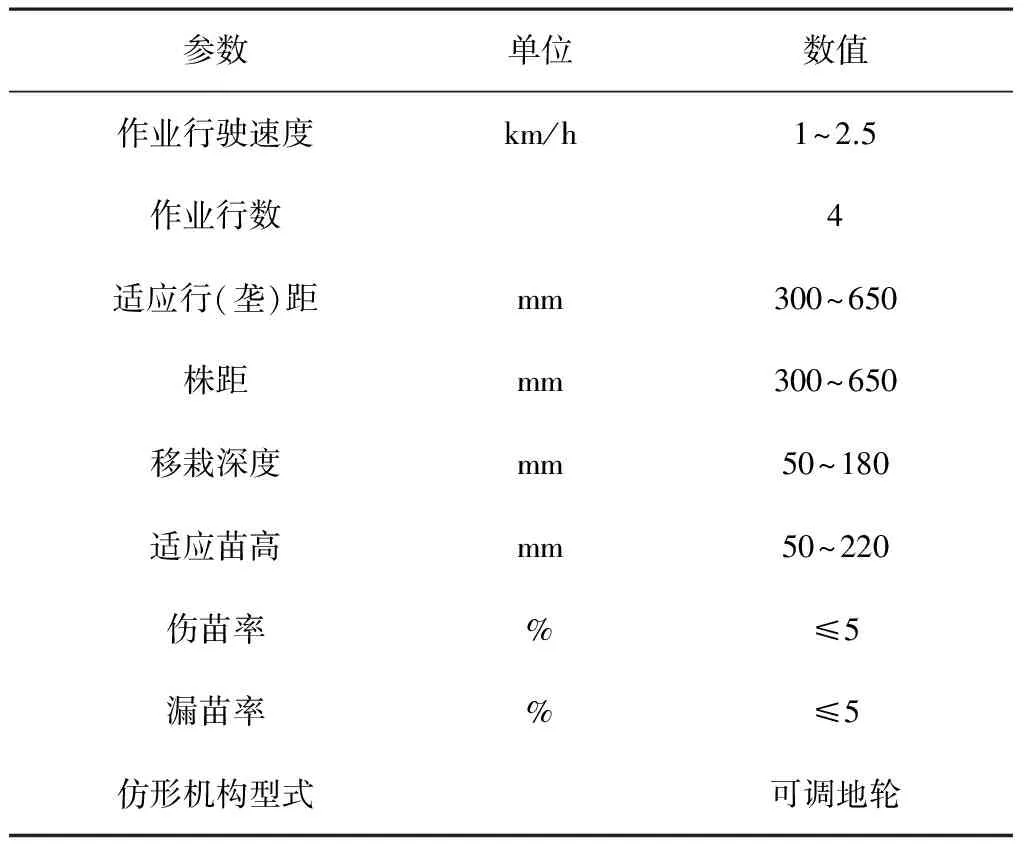
續表1
2 傳動系統及主要工作部件設計
2.1 傳動系統設計
2ZBX-4型吊杯式蔬菜移栽機主要采用鏈輪鏈條傳動,通過鏈輪輪齒與鏈條鏈節的嚙合來傳遞運動和動力。鏈條傳動傳動效率高、傳動比準確、結構緊湊、適應農田復雜惡劣的工作環境且制造與安裝精度要求低,更換方便,成本也低。傳動系統簡圖如圖2所示。地輪軸由拖拉機牽引隨地輪旋轉,經鏈輪Z1、Z2傳動至主軸,隨著主軸旋轉,動力經鏈輪Z3、Z4傳動至栽植裝置軸,帶動栽植裝置旋轉;同時,一部分動力經Z5、Z6傳動至一對錐齒輪Z7、Z8,進而帶動投苗裝置不斷旋轉投苗。

1.地輪軸 2.主軸 3.栽植裝置軸
2.2 栽植裝置設計
栽植裝置是移栽機的核心工作部件,作用是完成承接穴盤苗、打穴及栽苗工作,主要由滾輪軸承安裝盤、控制盤、滾輪軸承、安裝盤支撐、安裝盤、栽植裝置主軸、栽植器支撐板、滾子、復位彈簧、鴨嘴、承接杯、套筒及安裝盤等組成,如圖3所示。

1.軸承座 2.滾輪軸承安裝盤 3.控制盤 4.滾輪軸承 5.安裝盤支撐 6.安裝盤1 7.栽植裝置主軸 8.栽植器支撐板 9.滾子 10.復位彈簧 11.復位彈簧固定螺栓 12.鴨嘴 13.滾子固定螺栓 14.承接杯 15.套筒 16.安裝盤2
圖3中,承接杯、滾子、復位彈簧固定螺栓、鴨嘴、復位彈簧及滾子固定螺栓組成了栽植器。栽植器通過兩側栽植器支撐板安裝在兩側安裝盤上,安裝盤通過套筒安裝在栽植裝置主軸上,整個栽植裝置通過帶座軸承安裝在移栽單體機架上。工作過程中,栽植器承接杯杯口需要始終向上承接秧苗,且鴨嘴需要保持朝下狀態打穴栽植;為避免栽植器的翻轉,在栽植器一端設有控制盤,通過連桿與栽植器連接,控制盤與滾輪軸承安裝盤通過滾輪軸承連接。安裝盤、控制盤和連桿組成了四連桿機構,其工作時帶動栽植器旋轉,使承接杯杯口始終朝上且鴨嘴始終朝下,確保了鴨嘴的垂直入土和出土,保證了移栽后秧苗的直立度。栽植器安裝板上面設計有凸起,構成凸輪機構,栽植器上方滾子與栽植器安裝板組成滾子凸輪機構控制鴨嘴的打開,復位彈簧控制鴨嘴的關閉。
3 栽植株距調節原理與計算
3.1 零速投苗原理
鴨嘴的運動過程是移栽機隨拖拉機牽引的勻速直線運動和栽植器繞栽植裝置主軸做勻速圓周運動的合成,鴨嘴的運動軌跡如圖4所示。選取鴨嘴最低點為參考點,在圖4坐標系下建立參考點運動軌跡方程,即
x=Vtt+Rcosωt
(1)
y=-Rsinωt
(2)
(3)
式中x—鴨嘴水平方向位移;
y—鴨嘴垂直方向位移;
Vt—拖拉機前進速度;
ω—栽植裝置轉動角速度;
t—時間;
R—鴨嘴參考點回轉半徑;
λ—特征系數。
特征系數λ是參考點旋轉的線速度與移栽機的水平前進速度的比值。保證栽植秧苗的直立性是蔬菜種植的基本要求,而要保證栽植缽苗具有理想直立度,需要栽植裝置的定植點在水平方向上的瞬時速度矢量和相對地面為零,即“零速投苗”原理[9-12]。按照“零速栽苗”原理,要求投苗時秧苗在水平方向的速度為0,只有當λ>1時,才有可能實現零速投苗。因此,λ>1是移栽機正常工作的必要條件。

圖4 鴨嘴最低點運動軌跡
3.2 拖拉機前進速度與株距的關系
拖拉機前進速度與栽植頻率f和株距s的關系為
Vt=fs
(4)
3.3 栽植器個數與栽植裝置轉速的關系
栽植器的數量N與栽植裝置轉速n的關系為
f=Nn
(5)
3.4 栽植株距的調節
由式(3)和式(5)得
(6)
由式(3)~式(5)得
(7)
綜合所述,栽植株距的調整方式有以下3種:
1)根據式(4),采用調整拖拉機行駛速度的方式改變株距,但考慮到目前國內具有爬行擋的拖拉機很少,栽植株距小于30cm的作物時存在一定的困難,必須提高栽植頻率才能達到株距要求,而栽植頻率是由人工操作的勞動強度決定的,因此可能出現勞動強度大、漏苗等問題[10]。
2)根據式(6),采用調整栽植器數量來調節株距。但是,更改栽植器的同時需要改變機器的傳動比,而且栽植器受到結構的限制數量不能太多。
3)根據式(7),采用改變栽植裝置轉速來改變株距最為簡單,只需更換相應鏈輪改變傳動比即可實現。因此,本機采用更換地輪軸上鏈輪Z1與主軸上鏈輪Z2來調節株距。
4 田間試驗
為了更全面考察2ZBX-4型吊杯式蔬菜移栽機的工作性能,在山東農業大學蔬菜試驗基地進行了樣機試驗,圖5為樣機進行現場試驗圖。試驗地土壤為砂壤土,土壤含水率為15%,試驗前先由作畦機作畦使土壤平整、松軟。試驗選用軟穴盤72(12列×6行)穴,采用苗齡55天、株高16~17cm、基質含水率約18%的辣椒苗移栽,要求移栽株距為38~40cm,移栽深度5~7cm。在試驗地每行連續移栽130株苗,用秒表記錄試驗時間,重復試驗3次,試驗結果如表2所示,秧苗栽植效果如圖6所示。

圖5 移栽機試驗現場圖

試驗指標單位試驗數值栽植頻率株株/min·行45

續表2

圖6 秧苗栽植效果
試驗結果表明:該機的栽植株距穩定性好,傷苗率低,栽植成功率高,而且鏈輪更換方便,株距調節準確,能滿足實際生產的需要。
5 結論
1)設計了2ZBX-4型吊杯式蔬菜移栽機,該機由拖拉機牽引,人工投苗,可實現半自動化移栽。
2)λ>1是移栽機正常工作的必要條件。
3)分析了株距調節的原理,得到通過更換鏈輪進而改變栽植裝置轉速的方式是最簡單易行的株距調節方式的結論。
4)對辣椒苗進行了田間移栽試驗,結果表明:該機栽植株距和移栽深度穩定,傷苗率和漏栽率低,直立度好,工作效率高,能滿足不同地區不同蔬菜的移栽農藝要求。
[1] 陳永生,胡檜,肖體瓊,等.我國蔬菜生產機械化現狀及發展對策[J].中國蔬菜,2014(10):1-5.
[2] 糜南宏,趙映,秦廣明,等.蔬菜全程機械化研究現狀與對策[J].中國農機化,2014(3):66-69.
[3] 國家統計局農村社會經濟調查司.中國農村統計年鑒2014[M].北京:中國統計出版社,2014.
[4] 崔思遠,肖體瓊,陳永生,等.日本蔬菜生產機械化發展模式與啟示[J].中國蔬菜,2016(2):1-5.
[5] 韓長杰,楊宛章,張學軍,等.穴盤苗移栽機自動取喂系統的設計與試驗[J].農業工程學報,2013(8):51-61.
[6] 陳建能,黃前澤,王英,等.缽苗移栽機非圓齒輪行星輪系栽植機構參數分析與反求[J].農業工程學報,2013(8):18-26.
[7] 王君玲,高玉芝,李成華.旱地缽苗移栽機械化生產的現狀及發展趨勢[J].中國農機化,2003(6):12-14.
[8] 張鵬,曹衛彬,王鵬,等.番茄穴盤苗輸送帶式移栽機栽植機構的設計研究[J].農機化研究,2013,35(3):70-73.
[9] 崔巍,趙亮,宋建農,等.吊杯式移栽機栽植器運動學分析與試驗[J].農業機械學報,2012(S1):35-38,34.
[10] 封俊,秦貴,宋衛堂,等.移栽機的吊杯運動分析與設計準則[J].農業機械學報,2002(5):48-50.
[11] 金誠謙,吳崇友,袁文勝.鏈夾式移栽機栽植作業質量影響因素分析[J].農業機械學報,2008(9):196-198.
[12] 武科,畢新勝,陳永成.吊籃式移栽機栽植器的研究[J].農機化研究,2010,32(6):73-75,79.
Design and Research of the 2ZBX-4 Cup Vegetable Transplanting Machine
Wu Yanqiang1, Wang Wenli2, Hou Jialin1
(1.Mechanical and Electronic Engineering College, Shandong Agricultural University, Tai'an 271018, China; 2.Agricultural Machinery Safety Supervision Station in Shandong Province, Jinan 250013, China)
According to the current vegetable transplanting machine poor-quality problems,2ZBX-4 cup vegetable transplanting machine was designed,and this paper described how the machine works and analyzed the working process. Towed by a tractor,artificial feeding seedlings,it achieved semi-automatic transplanting. Plant space can be adjusted by changing the driven sprocket. A field test had been carried out using 2ZBX-4 cup vegetable transplanting machine,test results shows that planting spacing and planting depth is very stable,the device has the advantages of the low planted damage and leakage rate,the good upright degree,the high efficiency,which can meet the requirements of different regions in different agronomic transplanting vegetables.
vegetable transplantation; hanging cuptype; plug seedlings; traction-type
2016-03-24
山東省現代農業產業技術體系蔬菜產業創新團隊項目(SDAIT-05-11)
吳彥強(1992-),男,山東平原人,碩士研究生,(E-mail)18853818300@163.com。
侯加林(1963-),男,山東高密人,教授,博士生導師,(E-mail)jlhou@sdau.edu.cn。
S223.94
A
1003-188X(2017)08-0107-05
