小型農產品分選機的控制系統與控制方法
2017-12-16 08:01:44鄧繼忠任高生何明昊
農機化研究 2017年8期
關鍵詞:系統
李 山,鄧繼忠,任高生,何明昊
(華南農業大學 工程學院,廣州 510642)
?
小型農產品分選機的控制系統與控制方法
李 山,鄧繼忠,任高生,何明昊
(華南農業大學 工程學院,廣州 510642)
為減小基于機器視覺的農產品分選機的體積、降低設備成本,提出了一種以DSP為視覺核心、ARM為控制核心的小型農產品分選機。為此,詳細介紹了基于機器視覺技術的小型農產品分級機控制系統及控制方法,并以圣女果、金桔及桂圓干等3種物料作為試驗對象,測試系統的可靠性和工作效率。結果表明:針對家庭農場及小規模農產品的處理和營銷,在基于機器視覺的小型農產品分選機中采用ARM與DSP相結合的方法進行分選是可行的,能夠替代PC機或工業計算機實現分選機的低成本和小型化。
農產品;分選機;機器視覺;控制系統
0 引言
我國北方地區重要農產品經過分選,可以優質優價,增加農產品的附加值,提高農產品市場的競爭力。隨著圖像處理技術的日益成熟、處理器性能提升和成本下降,以圖像分析為核心的機器視覺技術已逐步應用于水果、干果、雞蛋等各類農產品的分級或分選中[1-4]。目前,國內外的各類基于機器視覺的農產品品質分選機主要以PC機或工業計算機為核心,計算機需要完成圖像處理與分析、物料位置的確定、缺陷的查找及分類等工作。該類型設備分選功能齊全、生產規模大、分選效率較高,較好地解決了大規模流水線上農產品的檢測分選問題[4];但其體積龐大,價格較為昂貴,一般適用于大中型果品加工企業。在我國小規模的農產品生產和經營模式仍保有相當數量的情況下,因體積與價格因素,以PC為核心的機器視覺分選系統在我國的推廣與普及受到限制。
針對家庭農場及小規模農產品的處理和營銷,本文提出了一種基于機器視覺的小型農產品分選機[5]。該分選機基于低成本、輕簡化原則,采用DSP實現圖像采集、圖像輸出、觸發式判別,使用ARM實現分選品種更換、控制信號輸出;同時,輸送帶采用多通道方式,攝像機一次可以采集4個通道的農產品圖像并進行處理與分析,在確保能對農產品的顏色、形狀及缺陷等主要參數進行實時分選的前提下,減小了分選系統的體積,降低了系統的成本,有利于基于機器視覺技術的分選機的推廣和應用。
1 小型分選機工作原理
圖1所示的系統結構示意圖反映了小型分選機的工作原理[5]。

1.水平傳送帶 2.ARM控制系統 3.攝像機 4.圖像采集光室 5.光電傳感器2 6.翻板 7.電磁繼電器 8.合格物料箱 9.不合格物料箱 10.電機 11.光電傳感器1
該系統由傳輸系統、控制單元、視覺系統及剔除裝置(包括電磁繼電器、電磁閥、翻板等)組成。工作時,物料首先從送料箱落入傳送帶上各個分選槽中,然后依靠電機控制傳送速度,將物料傳送進入圖像采集室。DSP對采集到的圖像進行預處理和分類識別處理,識別結束后將結果發送給ARM。若判別結果為次品,則由ARM將觸發信號送給電磁繼電器,電磁繼電器控制啟動電磁閥拉動翻板,將次品導入到不合格的物料箱;若判別結果為合格品,則不啟動剔除裝置,不合格物料將自由滑落到合格的物料箱中,完成一次分選動作。
1.1 視覺系統簡介
視覺系統以DSP為視覺核心,結合視頻采集模塊、視頻輸出模塊、光電觸發模塊,實現視頻監控和圖像識別。CCD攝像機位于傳送帶正上方,鏡頭朝下,實時采集傳送帶的輸送物料,視頻信息通過BNC接口傳輸到DSP芯片。本文采用的DSP型號為TI公司的DM642芯片,攝像機采集到的是25幀/s的PAL制式視頻數據流,DSP接收后對視頻流進行解碼,將每一幀圖像數據重復存儲在SDRAM某一固定位置中,再將當前存儲的每一幀圖像數據不斷輸出到LCD顯示屏上。
當圖像數據存儲在SDRAM中時,可以提取出來對其進行判別處理。但是,如果對每一幀圖像都進行判別處理,將給系統帶來巨大負荷。因此,本文采用了光電開關觸發判別處理的方式,即當傳送帶上有物料通過光電開光檢測區域時,光電開關將產生一個低電平信號,信號下降沿通過GPIO口被讀入DM642,觸發DM642中斷,提取當前SDRAM中的圖像數據進行分選處理,而在無物料通過時則不進行判別處理。因此,對于每排物料系統只需處理一張圖像即可得到判別結果,從而減輕了系統的負荷,提高了處理的效率。DSP處理完圖像后,立即將所得分類結果通過串行口發送給ARM,并等待下一次中斷信號。視覺系統處理工作流程如圖2所示。

圖2 視覺系統處理流程
1.2 控制系統簡介
控制系統以ARM為核心,結合人機交互模塊、控制信號輸出模塊、光電觸發模塊,實現分選模式切換、翻板閉合控制。本文中ARM采用三星公司的S5PV210芯片,為Cortex-A8架構,主頻1G Hz,可以流暢地運行Linux系統。
實際分選中,ARM接收從DSP發來的每次處理結果,依次存入存儲隊列中。當物料傳送到水平傳送帶末端時,觸發光電傳感器,光電傳感器即發送信號給ARM的GPIO口,產生低電平中斷。ARM進入中斷后,根據“先進先出”原則,從隊列中提取出最早的處理結果,根據結果通過GPIO給相應的電磁繼電器發送控制信號,電磁繼電器的通/斷帶動電磁開關,以控制翻板的打開或閉合。
同時,ARM將每次合格數和不合格數不斷地累加,并保存至對應的結果中,將新的結果顯示在觸摸顯示屏上,以提示用戶農產品分選狀況;而如果用戶需要更換分選的農產品種類時,只需要點擊觸摸屏選擇相應的種類,ARM會根據用戶的選擇通過串口發送信號給DSP,DSP接收到信號后,會更換分選程序以適應不同種類的分選。ARM控制模塊結構簡圖如圖3所示。

圖3 ARM控制系統結構簡圖
2 控制方法
2.1 控制系統中光電開關的設計
本文采用的ARM提供了30個通用I/O口,DSP提供了16個通用I/O口,輸入/輸出電壓為3.3V,可以通過編程設置引腳的輸入/輸出方向。其中,部分引腳為復用引腳,可以作為I/O引腳,也可以作為其他功能引腳。在本文中根據實際情況需要,在ARM和DSP中各使用1個GPIO引腳,供光電開關觸發信號的接入使用。
本文使用的是滬工集團的E3F3系列NPN型的光電開關,屬于偏光鏡反射型光電開關,投光部與受光部一體化,通過偏光鏡反射光光向的變化來檢測,這類光電開關能解決物體鏡面反射的問題。投光體射出的橫向(或者縱向)光波照射到反射板上,反射板將橫向(或者縱向)光波改變為縱向(或者橫向)光波反射回來,受光部接收到縱向(或者橫向)光波認為沒有物體遮擋。
光電開關的工作電壓為6~36V之間(此處選擇6V電壓),當輸送帶上的物料通過光電開關時,光電開關的輸出電壓由6V變為0V。由于GPIO的輸入/輸出電壓為3.3V,此處使用夏普公司的PC817型號光耦開關實現6V到3.3V的電壓轉變。如圖4所示,默認狀態下黑色導線輸出電壓為6V,光耦開關左側沒有電流通過,右邊斷開,GPIO輸入電壓為0V。當有物料通過時,黑色導線輸出電壓由6V降至0V,左側產生電流,右邊導通,GPIO輸入電壓上升至3.3V。因此,本文中斷觸發方式采用上升沿觸發。

圖4 控制系統中光電開關設計原理圖
該系統實現了4路并行處理,每路都有相應的剔除裝置對該路物體進行操作,剔出裝置使用電磁閥拉動翻板的方式將物體剔除。電磁閥驅動電路的作用是:在GPIO口有3.3V信號輸出時,將信號放大成24V電壓,驅動電磁閥拉動翻板。
2.2 控制系統中電磁開關的設計
本文針對4通道的需要采用了4個單獨的電磁繼電器,分別由ARM開發板的4個GPIO口進行控制,電磁繼電器和ARM開發板的GPIO之間同樣采用PC817光耦開關芯片進行控制。當GPIO口輸出高電平時,光耦開關左側有電流通過,右側導通;電磁繼電器閉合,電磁開關電路導通,在兩端附加的24V電壓的作用下,將翻板彈起。其電路示意圖如圖5所示。
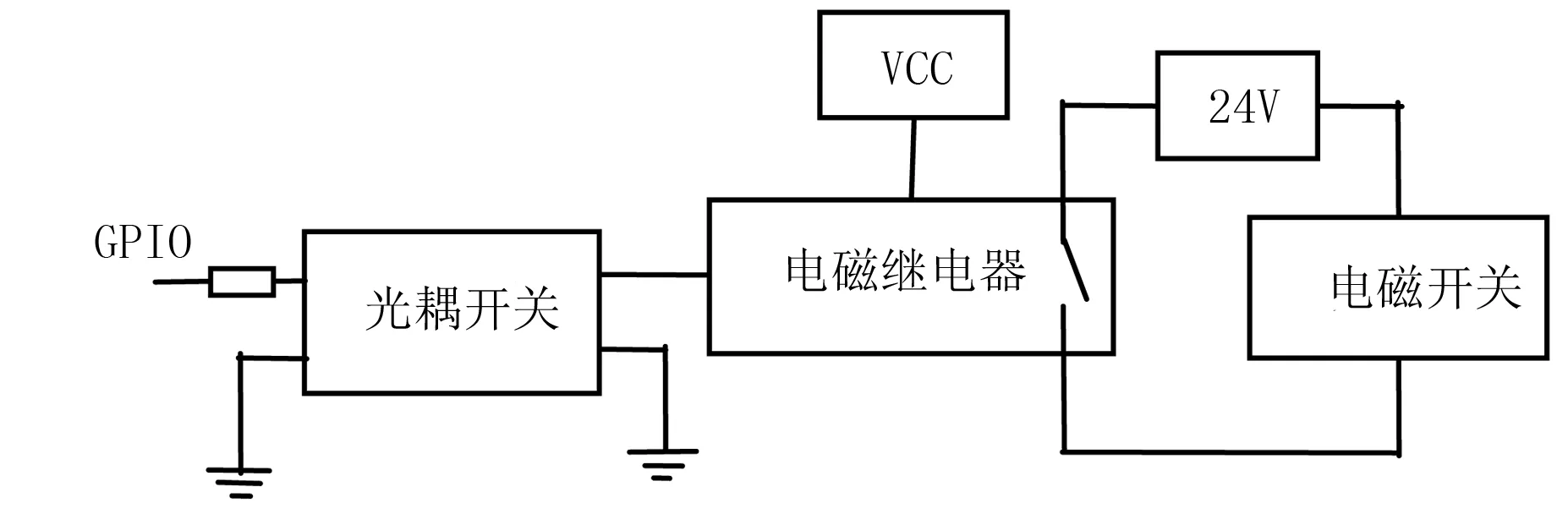
圖5 控制系統中電磁開關設計原理圖
為了確定翻板打開的時機,需要提前確定物料所在的位置。因此,在水平輸送帶的末端安裝一個光電開關,當物料經過光電開關時,觸發高電平信號通過GPIO口傳送給ARM,ARM獲得有物料通過的信息;隨后物料通過傾斜導軌下滑,假設翻板和傾斜導軌最高點距離為s、導軌傾角為θ、重力加速度為g、導軌摩擦因數為μ,則物料到達翻板處的時間為
(1)
由t的表達式可知:物料從觸發光電開關到到達翻板位置的時間是一個固定值,與物體的大小質量無關。因此,可以通過多次測試,選定一個合適的翻板開啟時間。
2.3 ARM控制系統中界面的設計
本文控制系統中用戶操控界面由Qt編寫,負責實時顯示統計的分選結果,以及為用戶提供切換分選品種的功能。每次開機啟動Linux系統時,默認自啟動用戶界面程序,如圖6所示。圖6中,左側為種類選擇區,已開發圣女果、金桔、桂圓、紅棗、核桃、栗子等多種果品分選程序;右下方為狀態結果顯示區,可以顯示好的個數、壞的個數、處理總數、傳送帶速度和處理速度;正中間顯示當前分選品種的圖片;右上方為“開始”和“結束”控制按鈕。
當用戶通過觸摸屏點擊界面左側品種名進行分選品種切換時,觸發Qt中Button的Click信號,通過配置好的信號與槽的關系,執行相應的槽函數,在槽函數中實現串口數據發送,通知DSP切換對應的分選函數。

圖6 用戶界面
2.4 控制系統的ARM與DSP的通信
本文中ARM與DSP之間采用RS-232串行口通信,其中RS-232是美國工業電子聯盟制定的串行數據通信的接口標準,現已被廣泛地用于計算機串行接口外設連接。通信內容如表1所示。

表1 ARM與DSP通信內容
因為本文為4通道并行分選,因此DSP發送的結果需要同時涵蓋4個通道的狀態。本文采用十六進制數字來表示,如某次分選結果為“0110”(0表示合格,1表示不合格),即第1、4通道的農產品是合格的,第2、3通道的農產品不合格。DSP只需要發送“0x6”即可,因為“0x6”是“0110”的十六進制表示;而ARM檢測到發送來的“0x”字符后,隨即讀取后一位字符,根據該字符的內容控制相應的電磁繼電器通斷。
ARM發送給DSP的內容不止一項,所以本文采用兩類字符分別表示,以便于區別。其中,阿拉伯數字表示分選種類,小寫字母表示功能選項。比如“0”代表核桃,“1”代表紅棗,“2”代表栗子;“a”表示分選開始,“b”表示分選結束。若DSP從串口讀取到“a”,則啟動分選程序,默認為核桃模式。若DSP從串口讀取到“1”,則將分選代碼替換為紅棗類。如果后期需要添加新的種類或功能,按數字或字母順序依次添加即可。
3 試驗驗證
3.1 材料與方法
采用市售的圣女果、金桔及桂圓干等3種農產品作為分選物料,對圣女果按大小分選,對金桔和桂圓干按顏色分別進行成熟度與破損度分選。
采用不同的物料間距和輸送帶速率分別進行測試,參見文獻[5]。在物料間隔方面,為了防止相鄰的物料互相越界干擾,物料間距必須隔1排(約55mm)以上;在輸送帶速率方面,調速電機有9個不同速度檔位(從10到90)可供選擇,過低速度影響分選效率,過高速度則剔除裝置無法及時反映。通過測試,選擇30、40、50等3檔進行試驗。
3.2 試驗結果
1)分選的可靠性。對所有物料測試了圖像分析耗時、翻板控制耗時,以及翻板在不同傳送帶輸送速度和不同物料間距下動作的可靠性。經過反復多次的測試與統計,在平均每次分選中,圖像處理與分析耗時約0.206 2s;翻板控制中,至少需要持續向電磁開關輸出約0.3s的電壓,才可實現翻板的完全打開。表2所示為物料間距與傳輸速度對剔除裝置是否可靠動作(即翻板是否打開)的影響。由表2可知:當速率為40檔(約18cm/s)、物料間隔2排(同一通道排隊分選物料的平均間距約160mm)時,在保證可靠性的前提下,分選效率(單位時間的分選數量)最高。
表2 不同傳送速率和物料間距對系統可靠性的影響
Table 2 Effect on system reliability of different transmission speed and material spacing

物料間距30檔40檔50檔隔1排翻板未打開圖像已處理翻板未打開圖像已處理翻板未打開圖像未處理隔2排翻板打開圖像已處理翻板打開圖像已處理翻板未打開圖像已處理隔3排翻板打開圖像已處理翻板打開圖像已處理翻板打開圖像已處理
2)分選效率。3種物料各150個,圣女果按大小分選,金桔與桂圓干分別按顏色測試成熟度和破損度。試驗表明:①圣女果、金桔和桂圓干的分選準確性分別為93.91%、97.19%和86.11%;②當電機速度設定為40檔(約18cm/s)時,可以進行可靠處理的分選效率最高,4通道每小時處理個數約為16 000顆。按所處理物料的平均單粒重推算,3種物料的最大處理效率分別為:圣女果337kg/h,金桔311kg/h,桂圓干228kg/h。
4 結論
采用DSP作為視覺處理核心、ARM作為控制核心,開發了基于機器視覺的小型農產品分選機的控制系統與控制方法,可以根據系統圖像識別的結果,控制傳送帶末端農產品的篩選。同時,用戶可以根據需要,無需專業人員指導,點擊觸摸屏即可更換分選種類,實現了在不更換設備的情況下多種類農產品的分選功能。
試驗結果表明:在一定的分選速度下,分選系統動作可靠,表明采用ARM與DSP相結合的方法開發小型農產品分選機是可行的,可替代PC機或工業計算機,實現分選機的低成本和小型化。其中,基于ARM的嵌入式linux系統具有良好的可移植性、穩定性及低功耗等特點,且具有豐富的應用開發工具和成熟的開發環境,很適合作為基于機器視覺的分選機控制系統核心。
本文考慮到DSP強大的計算能力及高度的靈活性和可編程性,因此圖像識別部分在獨立的DSP中執行。隨著ARM芯片性能不斷的提高,內部也集成了DSP、存儲器、各種接口控制模塊等部件,構成了一個完整的片上系統。后續研究可以將圖像識別部分也并入ARM模塊中,省去獨立的DSP芯片,進一步降低成本,使系統更集成化、小型化。
[1] 孔彥龍,高曉陽,李紅玲,等.基于機器視覺的馬鈴薯質量和形狀分選方法[J].農業工程學報,2012,28(17):143-148.
[2] 陳紅,夏青,左婷,等.基于機器視覺的花菇分選技術[J].農業機械學報,2014,45(1):281-287.
[3] 王潤濤,張長利,房俊龍,等.基于機器視覺的大豆籽粒精選技術[J].農業工程學報,2011,27(8):355-359.
[4] 王福娟. 機器視覺技術在農產品分級分選中的應用[J].農機化研究,2011,23(5):249-252.
[5] 鄧繼忠,李山,張建瓴,等.小型農產品分選機設計與試驗[J].農業機械學報,2015,46(9):245-250.
[6] Mizushima A, Lu R. A Low-cost color vision system for automatic estimation of apple fruit orientation and maximum equatorial diameter[J].Transactions of the Asabe, 2013, 56(3):813-827.
[7] Elmasry G, Cubero S, Molto E, et al. In-line sorting of irregular potatoes by using automated computer-based machine vision system[J]. Journal of Food Engineering, 2012, 112(1-2):60-68.
[8] Baigvand M, Banakar A, Minaei S, et al.Machine vision system for grading of dried figs[J].Computers and Electronics in Agriculture, 2015,119:158-165.
[9] Donis-Gonzalez I R, Guyer D E, Fulbright D W, et al.Postharvest noninvasive assessment of fresh chestnut (Castanea spp.) internal decay using computer tomography images[J]. Postharvest Biology and Technology, 2014,94:14-25.
[10] 馬秀蓮,衣淑娟.基于嵌入式系統與機器視覺的上孵前無精蛋識別系統[J].農業機械學報,2011,42(5):187-192.
[11] 劉儉英,田茂勝,王巧華,等.基于DSP的雞蛋破損檢測分級裝置設計[J].農業機械學報,2007,38(12):125-128.
[12] 許紅玉,張東興. 基于計算機視覺的水果分選機實時控制系統[J].農機化研究,2006(8):104-105.
[13] 安愛琴,余澤通,王宏強.基于機器視覺的蘋果大小自動分級方法[J].農機化研究,2008(4):163-166.
[14] 鄭冠楠, 譚豫之, 張俊雄, 等. 基于計算機視覺的馬鈴薯自動檢測分級[J]. 農業機械學報, 2009(4):166-168.
[15] 陳紅, 夏青, 左婷, 等. 基于機器視覺的花菇分選技術[J]. 農業機械學報, 2014(1):281-287.
[16] 黨宏社,宋晉國,郭琴.基于ARM的嵌入式水果大小檢測與分級系統的實現[J].四川農業大學學報,2011,29(1):89-93.
The Control System and Control Methods of a Small-scale Agricultural Products Sorting Machine
Li Shan, Deng Jizhong, Ren Gaosheng, He Minghao
(College of Engineering, South China Agricultural University, Guangzhou 510642, China)
In the aims of lowering the size and cost of agricultural products sorting machine, we raised an small-scale sorting machine with DSP-based vision kernel and ARM-based controlling kernel. The control system and the control method of the machine vision-based agricultural product sorting machine were introduced in this paper, and cherry tomatos,cumquats and dried longans were used to estimate the reliability and working efficiency of the system. The results showed feasibilities of machine vision-based agricultural product sorting machine featured with ARM and DSP in the aim of the processing and merchandising of small-size agricultural products, together with replacing PC and industrial computers in order to achieve lower size and cost of sorting machine.
agricultural products; sorting machine; machine vision; control system
2016-07-05
廣東省科技計劃項目(2013B020313003) ;國家星火計劃項目(2011GA780026)
李 山(1992-),男,江西景德鎮人,碩士研究生,(E-mail) 597330918@qq.com。
鄧繼忠(1963-),男,新疆烏蘇人,副教授,博士,(E-mail)jz-deng@scau.edu.cn。
TS255;S126
A
1003-188X(2017)08-0112-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
