基于霍爾傳感器陣列的電流測量系統*
2017-12-20 06:00:26項瓊岳長喜胡琛朱凱龔慧王歡
電測與儀表 2017年23期
關鍵詞:測量
項瓊,岳長喜,胡琛,朱凱,龔慧,王歡,
(1.中國電力科學研究院,武漢430074;2.華中科技大學電氣與電子工程學院,武漢430074)
0 引 言
電流的準確測量對于電氣測量、控制、保護、計量功能至關重要。常用的電流測量方法包括直接接觸測量和非接觸式測量。直接接觸測量基于歐姆定律[1],使用分流器實現電流的獲取,但是分流器的使用需要斷開一次導線,而且將導致運行過程中的額外功率損耗;非接觸式測量不需要斷開導線,基于電磁場原理完成電流測量,包括法拉第電磁感應定律[2],法拉第磁光效應[3]和霍爾效應[4],由于電磁式傳感器存在磁飽和的固有缺陷,無法測量直流電流[5-6],而磁光傳感器易受溫度、振動的影響[7-8],基于霍爾效應的傳感器受到越來越多的重視。
常用的霍爾效應傳感器有開環式結構和閉環式結構[9],然而,由于傳感器需要鐵芯作為集磁環,故仍然存在磁飽和的問題。近年來,陣列式傳感器開始作為電流測量新技術被廣泛研究,文獻[10]采用圓形陣列磁場傳感器,提高了單相電流的測量精度,降低了外界磁場對傳感器的影響;文獻[11]研制了一種包括4個傳感器陣列的傳感設備,對稱布置在電纜的周圍,實現電流的準確測量;文獻[12]提出了一種基于卡爾曼濾波的磁傳感器陣列電流測量,引入狀態值最優估計和最優穩態濾波算法,實現了傳感器數目的優化設計。然而,上述文獻并未計及載流導體位置誤差對傳感器誤差的影響,此外,其傳感器輸出形式均為電壓輸出,無法直接和具有大功率輸入要求的繼電保護裝置或者測控裝置連接,
設計了一種基于霍爾傳感器陣列的電流測量系統,首先建立了傳感部分的數學模型,分析了載流導體位置誤差對于傳感部分的影響,隨后設計了電流測量系統電路部分,主要包括加權增益調整電路、移相電路以及基于電壓反饋的功率放大電路的設計,最后進行了電流測量系統的準確度測試和位置誤差測試,驗證了測量系統的可用性。
1 霍爾傳感器陣列
霍爾傳感器陣列設計器的設計依據的是一次載流導線為長直導線的磁場分布模型,多個霍爾元件構成圓形陣列,起到近似積分的效果,通過測量該一次導線產生的磁場來計算被測電流的數值。
1.1 傳感部分數學模型
根據安培定律可知,在空氣中,如圖1所示的圓柱形無限長載流導線在距離中心軸x處產生的磁感應強度的大小為:

式中μ0為真空中的磁導率4π×10-7H/m;x為被測點距離導線軸心的距離,單位m;i為被測電流的大小,單位A。
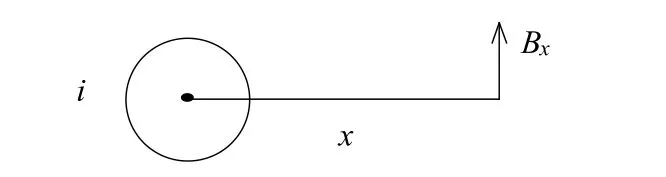
圖1 距離載流母線x處的磁感應強度Fig.1 Magnetic flux density at the point x away from the current-carrying busbar
圖2為由8個霍爾元件構成的霍爾傳感器陣列的基本模型,多個霍爾元件均勻對稱的呈圓形分布在載流導線的周圍,設第i個霍爾元件所在點的磁感應強度記作Bi,可得:

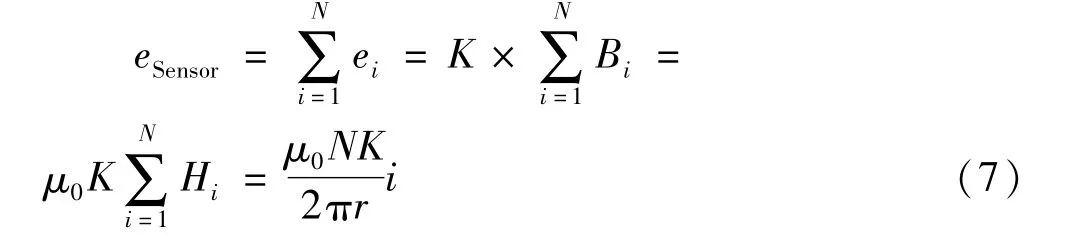
式中ei為單個霍爾傳感元件的輸出;K為傳感系數,假設所有霍爾元件為理想的單軸線性元件,且霍爾系數一致,霍爾元件半導體薄膜表面平行于載流導體中心線,則霍爾電勢相等,總的霍爾傳感器陣列輸出為:

由式(3)可以看出,傳感器陣列的輸出與與真空中的磁導率μ0、霍爾元件個數N、單個霍爾元件的傳感系數K、霍爾元件至載流導線中心軸的距離r等因素有關。
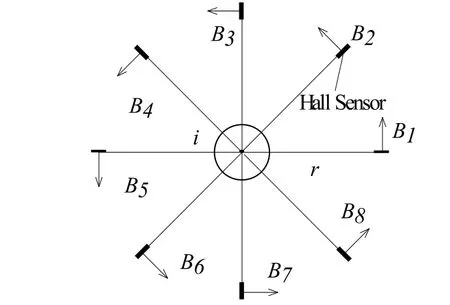
圖2 霍爾傳感器陣列數學模型Fig.2 Mathematic module of Hall effect sensor array
當霍爾元件數量足夠大時,以下關系成立:
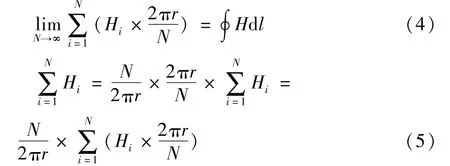
又根據安培環路定理,可以得到:

故當霍爾元件數量足夠多時,傳感器陣列輸出為:
比較式(3)和式(7)可見,當霍爾元件的數量足夠多時,多個霍爾元件的累加輸出有近似積分的效果,和均勻對稱分布的輸出一致,載流體形狀、位置均不會對霍爾傳感器陣列輸出造成影響。
1.2 載流導體位置誤差分析

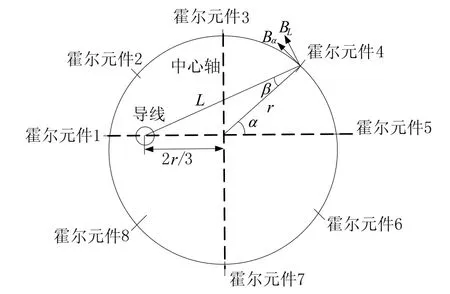
圖3 偏心情況下霍爾傳感器陣列和載流導體位置Fig.3 Location of Hall effect sensor array and current-carrying conductor in the case of eccentric
為了求取位置誤差對于霍爾傳感器陣列輸出的影響,分別求取各個霍爾元件的輸出,再將輸出相加,從而推導出偏心情況下霍爾元件傳感系數。假設霍爾元件均勻分布在半徑為r的圓周上,載流體電流為i,某個霍爾元件所在點產生的磁感應強度為BL,BL沿圓周切線方向分量為Bα,由電磁場理論可以得到:
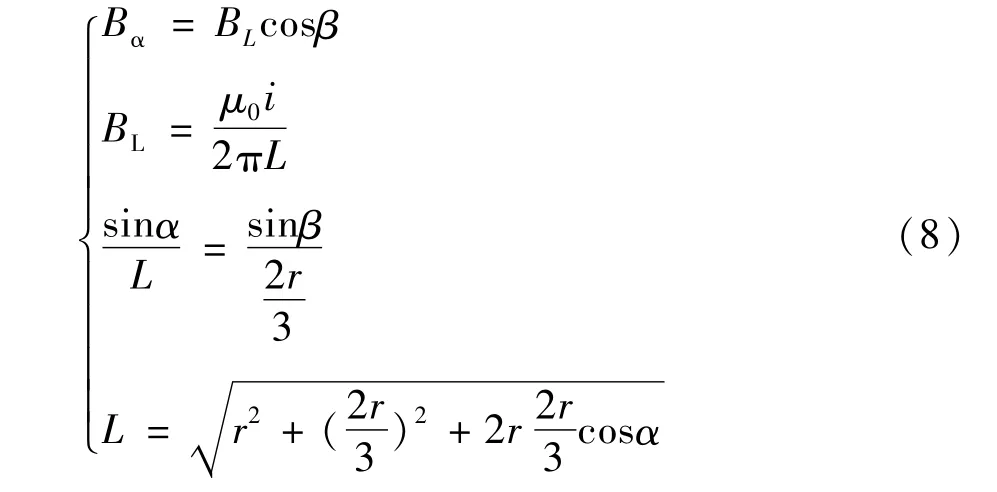
通過已知參數r和α,計算出電流i在圓周上任意處磁場沿圓周切線方向的磁感應強度的大小,化簡后可以得到:
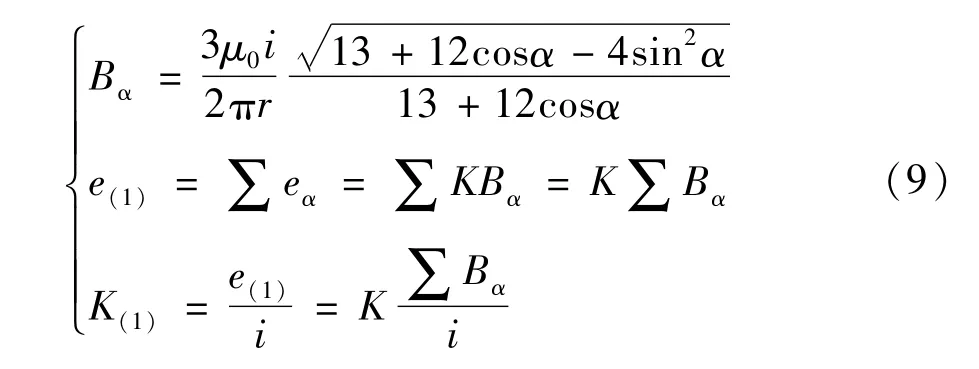
根據式(9),可以計算8個霍爾元件的輸出,結果如表1所示,偏心情況下的傳感系數見公式(10),而理想傳感系數如公式(3)所示,可以看出,偏心帶來的誤差達到了4.05%。

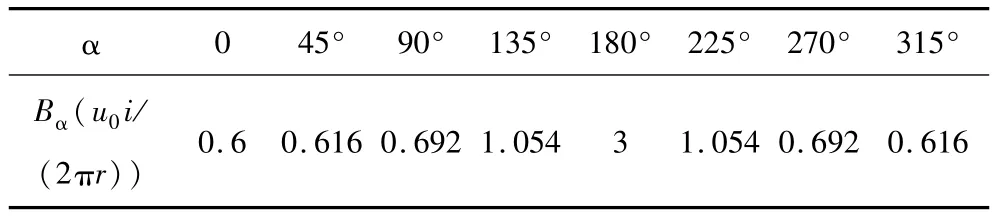
表1 8個霍爾元件處的磁感應強度Tab.1 Magnetic flux density of the eight Hall element
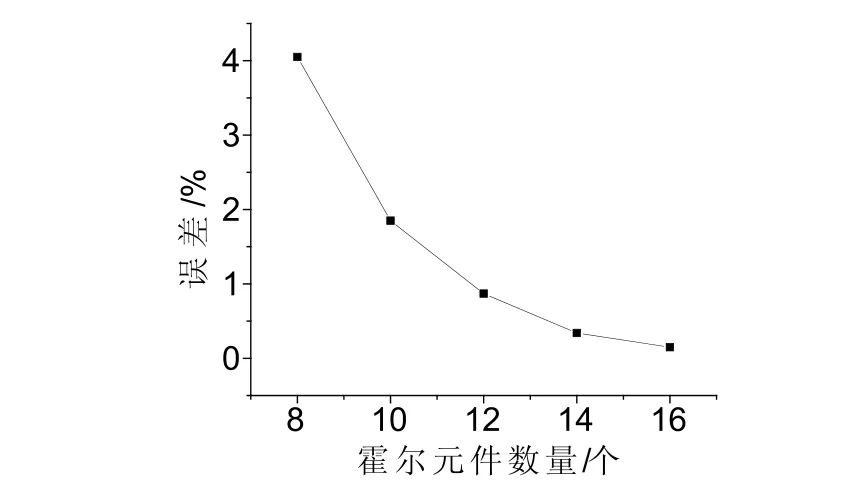
圖4 偏心產生的誤差與霍爾元件數量的關系Fig.4 Relationship between error caused by eccentricity and the number of hall element
2 電子電路部分
電流測量系統的電路部分主要包括:加權增益調整電路、移相電路以及基于電壓反饋的功率放大電路。
2.1 加權增益調整電路
增益調整電路如圖5所示,測得每個霍爾元件的霍爾系數Ki,通過修正系數將修正為統一的霍爾系數K。調整增益如公式(11)所示,將處理后的信號直接相加,即可得到歸一化后的總霍爾電勢,該電路可有效消除霍爾元件的霍爾系數之間的差異帶來的誤差。
2.2 移相電路
傳感部分輸出不可避兔存在角度偏移,為了滿足0.2級電流互感器的要求[13],設計的移相電路如圖6所示,為了方便調整,移相電路包括兩級:滯后移相電路和超前移相電路。滯后移相電路、超前移相電路的傳遞函數如公式(12)、公式(13)所示。本文設計的移相電路的調整角度范圍為-30°~40°。
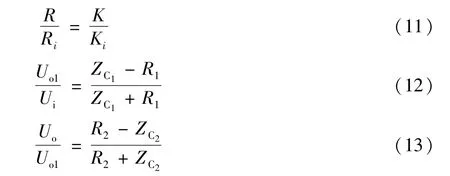
式中Ui為電路的輸入;Uo1為滯后移相電路的輸出;Uo為超前移相電路輸出;ZC1為電容C1的容抗;ZC1為電容C2的容抗。
2.3 基于電壓反饋的功率放大電路
霍爾傳感器陣列輸出為電壓形式,一般為毫伏級信號,輸出功率太小不足以驅動二次設備,為此,本文設計了一個基于電壓反饋原理的功率放大電路,如圖7所示。
功率放大電路的主芯片為國外某公司的OPA549,能夠連續輸出8 A的額定電流,滿足傳統電流互感器5 A輸出的要求,6腳和8腳短接后可以設置最大電流輸出為10 A,OPA549輸出接至OPA227的同相輸入端,OPA227的反向輸入端和輸出端短接構成電壓跟隨器,電壓跟隨器輸出接至OPA549同相輸入端形成電壓反饋,根據圖7容易求得,作用在電阻R0上的電壓等于輸入電壓Vi,則電路電壓電流轉換關系為:

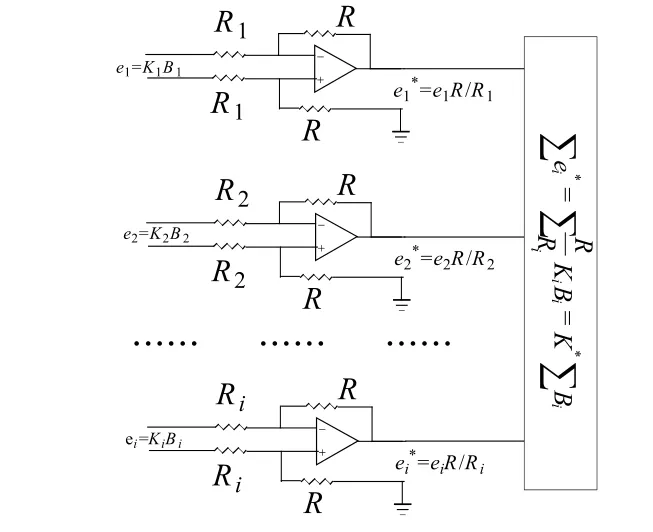
圖5 加權增益調整電路模型Fig.5 Weighted gain adjustment circuitmodel

圖6 移相電路Fig.6 Phase shift circuit
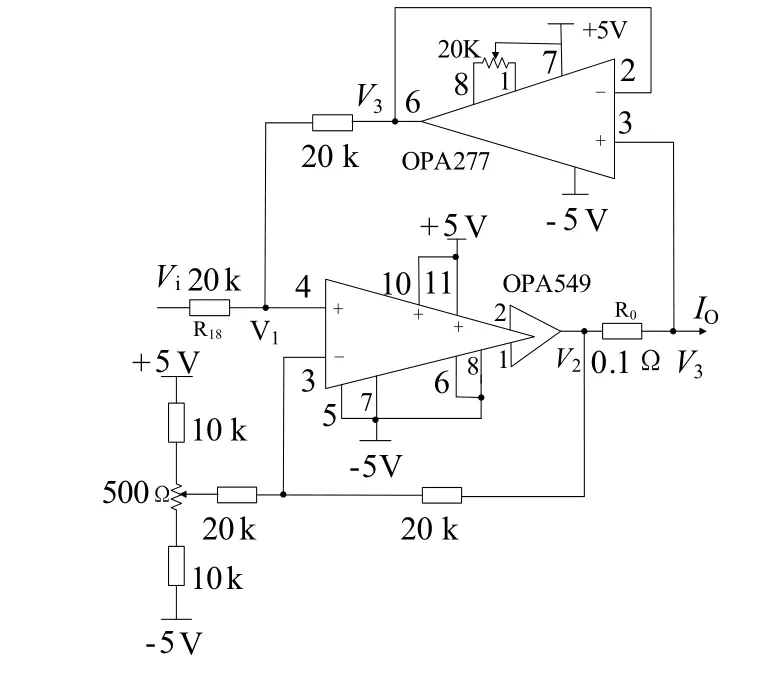
圖7 功率放大電路Fig.7 Power amplifier circuit
3 試驗結果與分析
本文設計的基于霍爾傳感器陣列的電流測量系統,傳感器陣列包括了16個霍爾元件,陣列形成的窗口大小為15 mm。加權增益調整電路、移相電路和功率放大電路設計集成在同一塊印刷電路板上,變比為600 A/5 A,外部直流工作電源為±15 V直流電源,總功耗0.4W。
3.1 基本誤差試驗
為了測試本文設計的電流測量系統的誤差,搭建了如圖8所示的試驗回路,將電流測量系統輸出和標準電磁式互感器輸出進行比較,兩者的輸出通過標準電阻取樣后,送至NIPCI-4474采集卡,上位機采用絕對值比較法進行誤差測試。測試在中國電力科學研究院進行,標準電流轉換器包括一個5 A/0.05 A的小互感器以及一個10Ω高精度的無感電阻,0.02級標準電磁式互感器變比為600 A/5 A。
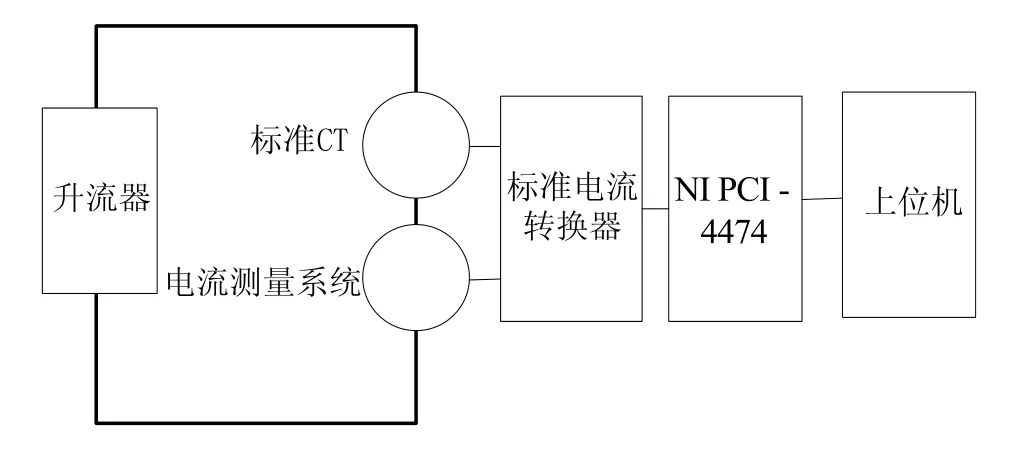
圖8 基本誤差試驗回路Fig.8 Experimental setup of basic error testing
基本誤差試驗的測試結果如圖9、圖10所示,由結果可以看出,電流測量系統的比值誤差、角度誤差均滿足JJG 1021《電力互感器》中0.2級電流互感器的技術要求。
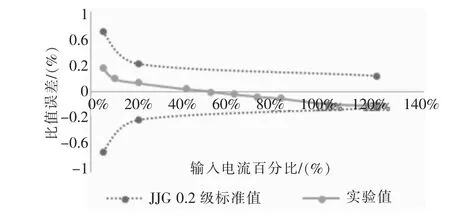
圖9 電流測量系統比值誤差Fig.9 Ratio error of the currentmeasurement system

圖10 電流測量系統角度誤差Fig.10 Phase displacement of the current measurement system
3.2 偏心誤差試驗
為了驗證電流測量系統在偏心情況下的誤差,將載流導線在電流測量系統的窗口內移動,以改變磁場的分布,同時保持一次電流不變。由于移動位置不可精確測量,故只能大致測量偏心位置后,記錄各個位置的輸出電壓,試驗計算得到的偏心情況下誤差變化情況如圖11所示。試驗時,最大偏心誤差達到了0.25%。
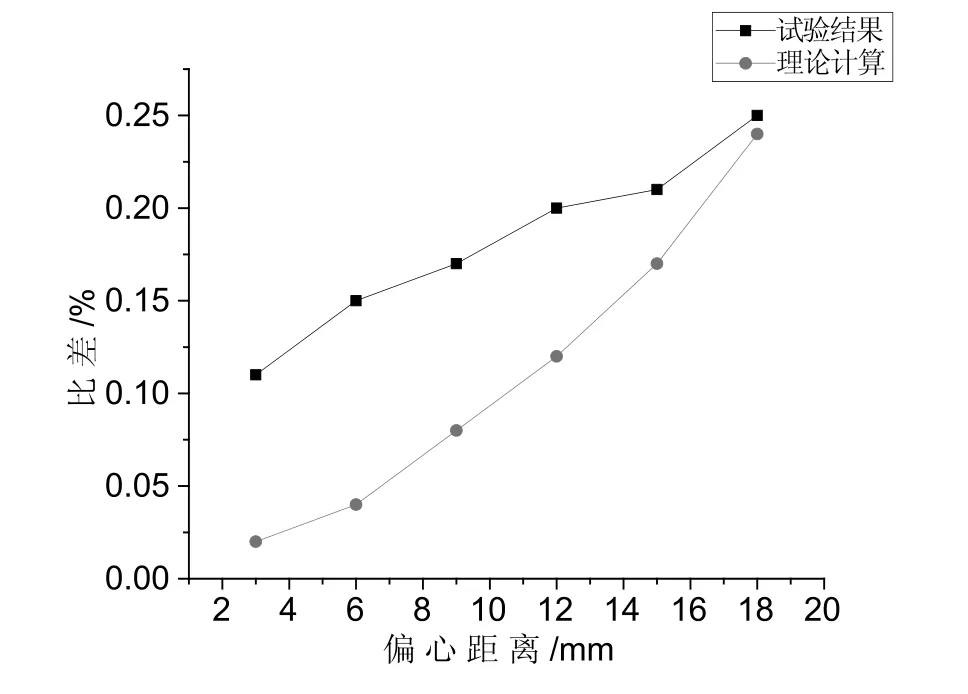
圖11 偏心誤差試驗Fig.11 Error testing experiment in the case of conductor eccentricity
理論計算和實際偏差的原因可能是偏心位置并非精確控制,而且實際測試過程中,電流測量系統不僅受到載流導體偏心的影響,載流導體偏角、測試過程中溫度變化均有可能導致電流測量系統的誤差變化。偏角誤差的影響、溫度的影響將在后續研究中進行。
4 結束語
本文提出了一種基于霍爾傳感器陣列的電流測量系統,研究了霍爾傳感器陣列的數學模型和位置誤差影響,設計了包括加權增益調整電路、移相電路和功率放大電路的電子電路,并進行了基本誤差試驗和位置影響試驗。
(1)本文設計的電流測量系統滿足0.2級的誤差要求,輸出達到5 A,可以直接接至保護、測控、計量裝置;
(2)當霍爾元件的數量足夠多時,電流測量系統的輸出接近理想情況,實際中16個霍爾元件加上后級電路,整個電流測量系統可以達到0.2級的誤差要求;
(3)非理想情況下,偏心將給電流測量系統引入誤差,霍爾元件數目越多,偏心帶來的誤差越小。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
