曲外錐乘波前體進氣道低馬赫數段實驗研究
2017-12-26 01:34:55賀旭照
實驗流體力學 2017年6期
關鍵詞:實驗
衛 鋒, 周 正, 李 莉, 賀旭照
(中國空氣動力研究與發展中心 超高速空氣動力學研究所/高超聲速沖壓發動機技術重點實驗室, 四川 綿陽 621000)
曲外錐乘波前體進氣道低馬赫數段實驗研究
衛 鋒, 周 正, 李 莉, 賀旭照*
(中國空氣動力研究與發展中心 超高速空氣動力學研究所/高超聲速沖壓發動機技術重點實驗室, 四川 綿陽 621000)
為了研究新型一體化曲外錐乘波前體進氣道在低馬赫數端的自起動、抗反壓特性及側滑對性能的影響,基于幾何約束及鈍度修型的實用化風洞實驗模型,采用進氣道節流系統,在來流馬赫數3.0、3.5和4.0,迎角-4°~6°范圍內,不同堵錐位置狀態下獲得了一體化曲外錐乘波前體進氣道的表面壓力分布及流場高清紋影。實驗結果表明,實驗模型在來流馬赫數3.5和4.0時具備自起動能力;在0°迎角,來流馬赫數3.5和4.0,最大抗反壓能力分別約為24和33倍來流壓力;側滑角對一體化曲外錐乘波前體進氣道的流量捕獲和流動壓縮性能影響相對較弱。曲外錐乘波前體進氣道具有同超燃沖壓燃燒室、高超聲速飛行器進行一體化設計的特性。
曲面錐;乘波前體;進氣道;自起動;抗反壓;實驗研究
0 引 言
數次吸氣式高超聲速飛行試驗[1]都未達到預期的加速比和飛行馬赫數,說明該類飛行器的推阻特性還需進一步優化提升。從空氣動力學的角度看,解決推阻匹配問題,就要增加飛行器的升阻比[2]和提高發動機的流量捕獲性能[3]。
乘波構型是高升阻比飛行器的最佳選擇[2],但基于現有乘波體設計方法獲得的飛行器外形,存在容積率較低、異形結構及不易調節的氣流壓縮能力等缺陷[4-5]。在高超聲速條件下可以設計出具有優良性能的進氣道[6-8],但此類設計往往未充分考慮與飛行器前體的流動參數及幾何外形的一體化;加之乘波壓縮面的異型曲面結構增大了進氣道和乘波體的匹配難度,采用人工修型匹配,會帶來附加的升阻比及進氣性能損失,使乘波體和進氣道集成后,很難達到單獨設計的指標[5]。
在高超聲速飛行器機體推進一體化設計方面,目前開展了一些研究工作。O’Neill[9]采用錐導乘波體,在錐形流場中流線追蹤出進氣道的唇罩,而進氣道近似采用二維構型幾何變換獲得。Takashima[10]和O’Brien[11]采用密切錐方法[12]生成前體,前體對稱面部分有相對平緩的區域,通過貼合二維進氣道的方法完成乘波體和進氣道的耦合。Starkey[13]采用變楔角法生成乘波前體,在前體對稱面附近設計了同樣的平緩區域,貼合二維進氣道與乘波體耦合。You[14]和Li[15]沿著展向采用密切內錐/外錐的方法獲得一體化的前體進氣道。現有的研究多停留在概念設計階段,并未對設計的前體進氣道系統進行詳細的流動結構及參數匹配分析研究以確認設計方法的可行性。同時一體化前體進氣道在寬范圍內的流動壓縮特性以及與燃燒室的匹配特性也應重點關注;設計的新型構型也必須具有高容積特性和良好的結構工程可實現性。作者前期構建了一套密切曲內錐乘波前體進氣道(Osculating Inward turning Cone Warerider forebody Inlet (OICWI))的設計方法[16-17],并完成了仿真和實驗研究[17-18],證明一體化內錐乘波前體進氣道具有優良的流動壓縮性能,滿足與燃燒室的匹配需求,但在容積和結構實現方面,存在進一步提升的空間。作者進一步發展了一體化曲外錐乘波前體進氣道(Curved Cone Waverider forebody Inlet(CCWI))技術,完成了理論和實用構型的分析仿真工作[19],結果表明CCWI構型結構外凸飽滿,具有良好的流量捕獲特性及流動壓縮能力,實現了曲外錐乘波體[20-21]和類二元進氣道符合氣動規律的一體化設計。
一款新型前體進氣道,自起動、抗反壓性能及側滑對進氣道壓縮能力的影響,都是評價其工程可用性的重要指標,這些性能的研究必須面對顯著的非定常分離流動現象,數值仿真方法還不足以解決此類問題。本文基于幾何約束及鈍度修型的CCWI風洞實驗模型,在來流馬赫數3.0、3.5和4.0,迎角-4°~6°范圍內,采用進氣道節流系統在不同堵錐位置,獲得一體化CCWI構型的表面靜壓、動態壓力分布及流場高清紋影。研究CCWI構型在低馬赫數端的自起動、抗反壓特性及側滑對性能的影響規律。
1 實驗模型及實驗系統介紹
密切曲外錐乘波前體進氣道的設計,采用了包含乘波外壓縮和進氣道內通道的一體化流線追蹤和密切曲外錐技術。在前體進氣道的唇口平面,定義進氣道唇口型線(Inlet Capture Curve, ICC)和前體前緣線(Front Capture Tube, FCT)。沿ICC曲線,找到其曲率中心,構造一系列密切面。在密切面內,基于獲得的內外流匹配的軸對稱基準流場和密切面內激波、前緣點和基準流場的對應關系,流線追蹤獲得一體化進氣道的機體壓縮面和唇罩型線。本文模型設計點為來流馬赫數5.5、軸對稱基準流場初始直錐角為10°、唇口角0°。CCWI構型詳細設計方法及其通流性能分析參見文獻[19]。數值模擬研究結果表明: 采用內外流匹配的一體化流線追蹤技術,實現了曲外錐乘波體和類二元進氣道符合氣動壓縮規律的整體式一體化設計[22],理論結果與仿真結果吻合較好;在設計狀態,乘波前體及內收縮段切除,對理論構型的基本壓縮性能無影響;考慮前緣鈍度、隔離段修型及黏性效應后,流量系數仍達到0.95,整體壓縮性能滿足發動機入口需求。
基于上述數值結果,得到的實驗構型如圖1所示,考慮風洞試驗段尺寸的限制,實驗模型長607.5mm,捕獲面積7000mm2。隔離段長120mm,約為7倍的喉道處對稱面高度,出口的寬高比為5.2。前體前緣鈍度0.5mm,唇罩前緣鈍度0.25mm。總收縮比4.6,內收縮比1.57。
Fig.1Threedimensionalviewofthegeometricallyconstrainedexperimentalmodel
實驗是在中國空氣動力研究與發展中心0.6m三聲速風洞[23]中進行的,該風洞試驗馬赫數范圍為0.4~4.5,試驗段截面為方形,尺寸為0.6m×0.6m,實驗段長度1.575m。本次試驗馬赫數為4.03、3.53和3.01,表1為對應的風洞來流參數。
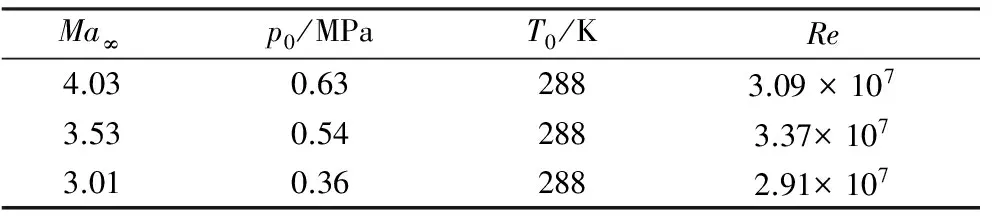
表1 風洞自由來流條件Table 1 Wind tunnel freestream flow conditions
圖2為實驗系統示意圖。實驗模型通過矩形轉圓形轉接段和堵錐筒連接。堵錐有效移動區間0~100mm,對應完全打開和全部堵塞狀態。在每次實驗前,模型迎角設0°,錐位為0;當風洞完全起動、流場穩定以后(一般設定穩壓時間5s),模型運動到需要的迎角,然后堵錐按照預設值逐次前進,并在每個位置保持3s以獲得穩定流態,此時采集模型表面靜壓和皮托壓力等數據。在進氣道進入完全不起動狀態后,堵錐進入退錐過程,和進錐的錐位次序相對應。圖3為試驗模型安裝在風洞試驗段的實物照片。
Fig.3PhotographofthefullyassembledCCWImodelintheSITWT’stestsection
圖4為實驗系統靜壓/皮托壓及動態壓力測點位置示意圖。模型表面分布了110個靜壓測點,分別位于機體和唇罩對稱面上及乘波前體的另2個密切面上;隔離段出口平面布置了25個皮托壓力探針,分布在5個截面上。壓力采集是型號為Pressure Systems Inc. Model 9016的電子壓力掃描系統。進氣道外壓縮區域量程為0~50kPa;進氣道內通道量程為0~200kPa;皮托壓力和流量測量系統的量程為0~500kPa。測量精度為滿量程的0.06%。實驗模型的外部流場采用高速紋影系統進行觀測。試驗采用的紋影系統最高幀頻為2000幀/s,最大像素為800pixel×800pixel,可根據需求調整。在進氣道內收縮段對稱面豁口位置上(見圖4紅點),布置了1個量程為200kPa的Kulite動態壓力傳感器,用來定量檢測進氣道起動/自起動現象,傳感器精度為滿量程的0.1%,采樣頻率50kHz。
2 自起動特性研究
圖5為Ma∞=4.0,迎角(AOA) 0°時,進錐和退錐過程中,實驗模型對稱面機體側(A line)的靜壓分布。可以看出,隨著錐位增加,進氣道反壓上升,高壓區在進氣道內部持續前傳,在錐位xc=65mm處達到臨界點。堵錐位置若持續增大,對稱面靜壓分布如圖5中xc=67.5mm分布線所示,由高反壓引起的流場擾動傳至進氣道內收縮段豁口前,此時進氣道已經完全不起動,內通道壓力平緩上升,沒有出現明顯的激波反射現象,氣流處于亞聲速狀態。此時,堵錐位置逐漸后退,隨著堵錐持續后退,壓升區域逐漸縮回內通道,進氣道又重新恢復起動狀態。例如當堵錐位置后退至xc=60mm時,壓升區域已完全縮回內通道內,和進錐時xc=60mm時的壓力分布完全重合。從機體側對稱面靜壓進錐退錐過程中的分布來看,CCWI在Ma∞=4.0,迎角0°時具備自起動能力,且自起動過程未見明顯流動遲滯現象。進一步后退堵錐xc<55mm,內通道出現斜激波反射造成的壓力波動現象,進氣道處于完全通流狀態,氣流處于超聲速的起動狀態。
Fig.5Staticpressuredistributionsonbodyside’ssymmetricwallatdifferentthrottlingpositionsatMa∞=4.0,AOA=0°
圖6(a)為CCWI構型在來Ma∞=4.0,迎角0°時,CCWI不起動和自起動后的紋影照片。當進氣道不起動時,在唇口前部機體側出現明顯的非定常分離激波流動結構;顯著特征為分離激波、大范圍分離區和由分離引起的外溢唇罩激波。需要指出的是,這種分離流動結構以一定頻率間歇性出現;而當進氣道完全起動后,流場中前體激波及設計的等熵壓縮波清晰可見,前體邊界層結構也有較高分辨,對應的流場結構如圖6(a)中標識。圖6(b)為CCWI自起動過程中動態壓力監測點上的脈動壓力信號隨時間的分布圖。在進氣道不起動時,檢測點上存在周期性的喘振信號,說明此時進氣道以一定頻率在起動和不起動之間快速切換,進氣道進入了由高反壓引起的喘振狀態。在不起動到起動過程中,喘振在89.5~90s間,周期逐漸拉長,然后突然消失。當進氣道恢復完全起動狀態后,監測點上喘振壓力脈動消失。
圖6Ma∞=4.0、迎角0°時,不起動和自起動紋影照片和動態壓力測點信號圖
Fig.6UnstartandrestartschlierenmapsatMa∞=4.0,AOA=0°anddynamicpressuredistributionduringCCWI’srestarting
圖7(a)為CCWI構型在來流Ma∞=3.5、迎角0°時,CCWI不起動和自起動后的紋影照片。圖7(b)為CCWI在自起動過程中動態壓力監測點上的脈動壓力信號隨時間的變化圖。整體的流動結構和動態壓力分布趨勢和Ma∞=4.0、迎角0°時的結果一致,不再贅述。CCWI在Ma∞=3.5的狀態具備自起動能力,只是Ma∞=3.5時,前體激波離進氣道唇口更遠一些;不起動時,動態壓力監測點上的喘振壓力峰值要低一些。
圖8(a)為CCWI構型在來流Ma∞=3.0、迎角0°堵錐放空時的紋影照片。圖8(b)為動態壓力監測點上的脈動壓力信號分布圖。進氣道在該狀態下,即使反壓很低,唇口附近也存在明顯的分離渦及由此引起的唇口區域的分離激波、唇罩外溢分離激波結構;與圖6(a)中的流動結構不同的是,分離流動結構無間歇持續存在。動態壓力信號則表現出無規則的大振幅脈動,說明進氣道在Ma∞=3.0時不能實現起動。
圖9給出了Ma∞=4.0、迎角0°,進氣道處于起動和由反壓導致的不起動狀態,及Ma∞=3.0,迎角0°進氣道由低馬赫數來流導致的不起動狀態時,脈動壓力傳感器測量信號的功率譜密度圖。功率譜密度采用文獻[25]介紹的方法換算,對應圖9功率譜密度的原始壓力-時間信號圖如圖6(b)和8(b)所示。在Ma∞=4.0、迎角0°,進氣道由高反壓導致不起動時,功率譜密度整體分布在106Pa2/Hz以上,存在26.6Hz的喘振基準頻率峰值,在53.4和80Hz附近存在和基準喘振頻率共振的次峰值,其成因文獻[25]有詳述。當進氣道完全處于起動狀態后,整體的功率譜較不起動時低數個數量級,在102Pa2/Hz級附近,且無明顯的峰值頻率。當進氣道在Ma∞=3.0,處于由低馬赫數導致的不起動狀態時,其整體的功率譜密度較進氣道在Ma∞=4.0完全起動時的高,處在105Pa2/Hz附近,但并無明顯的峰值,其分布形態完全不同于由反壓導致的不起動功率譜密度分布,說明此時的脈動處在一個寬頻范圍內的不穩定狀態。從上文的分析可以定量核實CCWI在Ma∞=4.0的不起動-自起動特性及Ma∞=3.0時的不起動特性。CCWI在Ma∞=3.5不起動-自起動狀態下的功率譜密度分布和Ma∞=4.0狀態下的類似,不再贅述。
圖7Ma∞=3.5、迎角0°時,不起動和自起動紋影照片和動態壓力測點信號圖
Fig.7UnstartandrestartschlierenmapsatMa∞=3.5,AOA=0°anddynamicpressuredistributionduringCCWI’srestarting
圖8Ma∞=3.0、迎角0°時,不起動紋影照片和動態壓力測點信號圖
Fig.8UnstartschlierenmapsanddynamicpressuredistributionatMa∞=3.0,AOA=0°
Fig.9Spectraofdynamicpressuresignalsduringstart,unstartatMa∞=4.0andunstartatMa∞=3.0,AOA=0°
圖10給出了Ma∞=4.0,迎角0°及4°時,在進氣道堵錐向前移動過程中,測得的進氣道流量系數的變化情況。當進氣道起動時,其流量系數分別在0.68和0.79左右,且不同起動堵錐位置的均方差小于2%。當進氣道處于不起動狀態時,其流量捕獲系數明顯小于起動時的數值,且隨著進錐量的增加,流量捕獲系數持續減小。這個過程在流態上對應的是進氣道由小喘向大喘的過渡。到達最大進錐位置后,進氣道流量系數減小到0.55和0.66左右,減小量達到15%左右。需指出的是,實驗測得的不起動狀態的流量是一個平均值,而真實不起動狀態的流量是伴隨喘振現象的一個非穩定脈動量。
3 抗反壓性能研究
對于高超聲速前體進氣道,獲得內通道-隔離段的抗反壓性能,是確定與其匹配的燃燒室最大允許壓力及設計燃燒室型面/釋熱規律的十分關鍵的參數。從進氣道通流起動,到不起動狀態,一般設定10個左右的進錐位置。定義機體側對稱面(A line)壓升前傳到喉道附近時的隔離段出口壓力,為進氣道所能承受的最大反壓。如圖11所示,在Ma∞=4.0、迎角6°,在堵錐從0mm進錐到70mm位置的過程中,反壓逐步增高,至錐位62.5mm處,壓力升高區域已經前傳到喉道附近,隨后當錐位進一步增加至65mm時,進氣道將不起動。此時認定錐位62.5mm時,隔離段出口的壓力即為Ma∞=4.0、迎角6°時,進氣道的最大抗反壓數值。通過以上方法,研究了一體化CCWI實驗模型,在Ma∞=4.0、迎角為-4°、0°、4°及6°和Ma∞=3.0、迎角0°時的最大抗反壓性能。圖12為獲得的馬赫數4.0和3.5條件下的進氣道最大抗反壓數值。可以看出實驗模型的最大反壓能力隨著馬赫數和迎角的增加而增大:馬赫數4.0時為35倍左右的來流壓力,馬赫數3.5,迎角0°時為24倍的來流壓力。目前限于進錐位置數量的限制,并不能完全精確獲得內通道壓升剛好到達喉道位置時的隔離段出口壓力,但給出的結果對確定燃燒室內的最大壓力限制仍具有重要指導意義。
Fig.11Staticpressuredistributiononbodyside’ssymmetricwallatMa∞=4.0,AOA=6°asthrottlingconemovingforward
4 側滑對CCWI性能的影響
性能良好的高超聲速飛行器前體進氣道,其壓縮及流動特性應該對飛行器側滑角不敏感。本節通過實驗研究了側滑對CCWI構型性能的影響。圖13為Ma∞=4.0、迎角0°和不同側滑角條件下,CCWI構型對稱面上的壓力分布。可以看出,外壓縮段對稱面壓力分布基本沒有受側滑影響;在內通道,側滑角4°以內的壓力分布基本無差別;在側滑角6°時,在內通道x=150mm附近的激波反射局部區域,壓力分布略高于無側滑的情況;在其他位置,側滑造成的壓力分布差別都很小。通過實驗數據換算得到側滑角4°時的流量系數,僅比側滑0°時的小1.5%(流量測量實驗方法見文獻[18])。圖14為不同側滑角下隔離段出口的皮托壓力分布,圖中黑點為皮托壓力測點位置。側滑角β=0°時,隔離段出口皮托壓力沿對稱線z=0mm的對稱性較好,由于流動在機體側形成較厚邊界層,同時由于邊界層和激波的作用,使邊界層進一步增厚,導致靠近下部機體側的低皮托壓區域明顯大于唇罩側。側滑角小于4°時,流動核心區域的皮托壓分布均勻,靠近機體側的低皮托壓區域,略向迎風側移動,這表明側滑形成的側向流動對低能流區域有一定的吹離效應。側滑角β=6°時,側向流動的吹離能力更強,迎風方向核心流動區域的皮托壓力增加,背風方向的皮托壓力減小;靠近機體側的低皮托壓力區域,進一步向迎風側擴張移動。總的來說,在側滑角不大于4°時,側滑對CCWI性能的影響并不明顯。
Fig.13StaticpressuredistributiononsymmetricwallatdifferentsideslipanglesatMa∞=4.0,AOA=0°
Fig.14PitotpressuredistributionsinisolatedexitplaneatdifferentsideslipanglesatMa∞=4.0,AOA=0°
5 結 論
基于構建的新型CCWI一體化高超聲速前體進氣道構型,開展了馬赫數4.0、3.5和3.0條件下的實驗研究。研究了一體化CCWI構型的自起動、最大抗反壓及側滑性能,獲得如下結論:
(1) 一體化CCWI構型在來流馬赫數4.0和3.5,迎角-4°~6°都可以實現自起動;來流馬赫數3.0時,進氣道不能起動。
(2) 進氣道的最大抗反壓性能在來流馬赫數4.0時為35倍左右來流壓力,在來流馬赫數3.5時為25倍來流壓力。
(3) 側滑對一體化CCWI構型流動壓縮性能及隔離段出口均勻度的影響較小,側滑角4°時相較無側滑時的流量系數只減小1.5%。
實驗結果表明,曲外錐乘波前體進氣道性能良好。下一步可以開展此類進氣道同超燃沖壓燃燒室及飛行器的一體化研究,為吸氣式高超聲速飛行器的一體化設計提供一種新的解決方案,推動乘波特性推進流道的工程化應用。
[1]Richard M, Scott M. X-51 development: a chief engineer’s perspective[C]. 17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, 2011.
[2]Kuchemann D. The aerodynamic design of aircraft[M]. Oxford: Pergamon Press, 1978: 448-510.
[3]Heiser W H, Pratt D T. Hypersonic airbreathing propulsion[M]. Published by American Institute of Aeronautics and Astronautics Inc, 1994: 32-33.
[4]Haney J W, Beaulieu W D. Wave rider inlet integration issues[R]. AIAA-1994-0383, 1994.
[5]Vijay S, Andrew G, Mark S. Automated design optimization for the P2 and P8 hypersonic inlets[J]. Journal of Aircraft, 1997, 34(2): 308-316.
[6]Thomas M B, Norbert C B. Forebody precompression effects and inlet entry conditions for hypersonic vehicles[J]. Journal of Spacecraft and Rockets, 1998, 35(1): 30-36.
[7]Frederick S B, Robert A B, Tam C J. Design and analysis of streamline traced hypersonic inlets[R]. AIAA-1999-4974, 1999.
[8]Smart M K. Design of three-dimensional hypersonic inlets with rectangular to elliptical shape transition[J]. Journal of Propulsion and Power, 1999, 15(3): 408-416.
[9]O’Neill M K, Lewis M J. Optimized scramjet integration on a waverider[J]. Journal of Aircraft, 1992, 29(6): 1114-1123.
[10]Takashima N, Lewis M J. Engine-airframe integration on osculating cone waverider-based vehicle designs[R]. AIAA-96-2551, 1996.
[11]O’Brien T F, Lewis M J. Rocket-based combined-cycle engine integration on an osculating cone waverider vehicle[J]. Journal of Aircraft, 2001, 38(6): 1117-1123.
[12]Sobieczky H, Dougherty F C, Jones K D. Hypersonic waverider design from given shock waves[C]//Proceedings of the First International Hypersonic Wave rider Symposium, University of Maryland, College Park, MD, 1990.
[13]Ryan P S, Mark J L. Design of an engine-airframe integrated hypersonic missile within fixed box constraints[R]. AIAA-99-0509, 1999.
[14]You Y C, Zhu C X, Guo J L. Dual waverider concept for the integration of hypersonic inward-turning inlet and airframe forebody[R]. AIAA-2009-7421, 2009.
[15]Li Y Q, An P, Pan C J, et al. Integration methodology for waverider-derived hypersonic inlet and vehicle forebody[R]. AIAA-2014-3229, 2014.
[16]賀旭照, 周正, 倪鴻禮. 密切內錐乘波前體進氣道一體化設計和性能分析[J]. 推進技術, 2012, 33(4): 510-515.He X Z, Zhou Z, Ni H L. Integrated design methods and performance analyses of osculating inward turning cone waverider forebody inlet(OICWI)[J]. Journal of Propulsion Technology, 2012, 33(4): 510-515.
[17]He X Z, Le J L, Zhou Z, et al. Osculating inward turning cone waverider/inlet (OICWI) design methods and experimental study[R]. AIAA-2012-5810, 2012.
[18]周正, 賀旭照, 衛鋒, 等. 密切曲內錐乘波前體進氣道低馬赫數性能實驗研究[J]. 推進技術, 2016, 37(8): 1455-1460.Zhou Z, He X Z, Wei F, et al. Experimental studies of osculating inward turning cone waverider forebody inlet(OICWI) at low Mach number conditions[J]. Journal of Propulsion Technology, 2016, 37(8): 1455-1460.
[19]賀旭照, 樂嘉陵. 曲外錐乘波體進氣道實用構型設計和性能分析[J]. 航空學報, 2016, DOI: 10.7527/S1000-6893.2016.0289. He X Z, Le J L. Design and performances analysis of a practical curved cone waverider inlet[J]. Acta Aeronautica et Astronautica Sinica, 2016, DOI:10.7527/S1000-6893.2016.0289.
[20]He X Z, Le J L, Wu Y C. Design of a curved cone derived waverider forebody[R]. AIAA-2009-7423, 2009.
[21]賀旭照, 倪鴻禮. 密切曲面錐乘波體-設計方法和性能分析[J]. 力學學報, 2011, 43(6): 1077-1082.He X Z, Ni H L. Osculating curved cone(OCC) waverider: Design method and performance analysis[J]. Chinese Journal of Theoretical and Applied Mechanics, 2011, 43(6): 1077-1082.
[22]Trent T, David Van W. Performance analysis of hypersonic shape changing inlets derived from morphing streamline traced flowpaths[R]. AIAA-2008-2635, 2008.
[23]http: //www.cardc.cn:88/html/Facility/f2/65.html[24]He X Z, Zhao H Y, Le J L. Application of wall function boundary condition considering heat transfer and compressibility[J]. Acta Aerodynamic Sinica, 2006, 24(4): 450-453.
[25]Simon T, Philippe D, Sébastien D. Experimental study of supersonic inlet buzz[J]. AIAA Journal, 2006, 44(10): 2354-2365.
ExperimentalstudiesofCurvedConeWaveriderforebodyInlet(CCWI)atlowMachnumberrange
Wei Feng, Zhou Zheng, Li Li, He Xuzhao*
(Science and Technology on Scramjet Laboratory, Hypervelocity Aerodynamics Institute of China Aerodynamics Research and Development Center, Miangyang Sichuan 621000, China)
The self-start ability, anti-backpressure performance and side slip influences to the performance of the Curved Cone Waverider forebody Inlet(CCWI) were experimentally studied in the present paper. Based on the geometrically constrained and bluntly modified practical CCWI wind tunnel experimental model, using the inlet throttling systems, the static pressure distributions and high resolution sherilen maps of the CCWI’s flow field were obtained at free steam Mach numbers(Ma∞) 3.0, 3.5 and 4.0 at different throttling cone positions. The experimental results show that the integrated CCWI model can self-start atMa∞3.5 and 4.0. At the angle of attack 0°, its maximum anti-back pressure abilities is about 24 and 33 times of the free stream static pressure(p∞) atMa∞3.5 and 4.0, respectively. Side slip has little influence on mass flow capture and flow compression abilities for CCWI. The study on CCWI can be used for practical integration studies with scramjet engine and air-breathing vehicles.
curved cone;waverider;inlet;self-start;anti-backpressure;experimental study
2017-04-25;
2017-09-07
國家自然科學基金(51376192)
*通信作者 E-mail: hexuzhao@sina.com
WeiF,ZhouZ,LiL,etal.ExperimentalstudiesofCurvedConeWaveriderforebodyInlet(CCWI)atlowMachnumberrange.JournalofExperimentsinFluidMechanics, 2017, 31(6): 1-7. 衛 鋒, 周 正, 李 莉, 等. 曲外錐乘波前體進氣道低馬赫數段實驗研究. 實驗流體力學, 2017, 31(6): 1-7.
1672-9897(2017)06-0001-07
10.11729/syltlx20170049
V235.213
A
衛鋒(1987-), 男,四川綿陽人,碩士,助理研究員。研究方向:高超聲速氣動布局及內外流一體化技術。通信地址:四川省綿陽市二環路南段6號19信箱01分箱(621000)。E-mail:wf_nudt@hotmail.com
(編輯:楊 娟)
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55