城市道路競爭/協作通行行為方式選擇模型
2017-12-28 02:40:28王長虹石建軍劉小明李鵬飛
黑龍江交通科技 2017年11期
關鍵詞:模型
王長虹,石建軍,劉小明,2,李鵬飛
(1.北京工業大學交通工程北京市重點實驗室,北京 100124;2.交通運輸部,北京 100736)
城市道路競爭/協作通行行為方式選擇模型
王長虹1,石建軍1,劉小明1,2,李鵬飛1
(1.北京工業大學交通工程北京市重點實驗室,北京 100124;2.交通運輸部,北京 100736)
研究道路資源有限條件下車輛競爭與協作通行行行為。根據北京市2條城市快速路基本路段的車輛運行軌跡數據,對競爭/協作通行行為進行了描述及比較,并將通行行為分為競爭和協作兩類。以競爭/協作通行行為方式選擇為因變量,將速度、加速度、間隙、速度差、加速度差等作為候選自變量,分析候選自變量與因變量之間的相關性。采用二項logit模型建立競爭/協作通行行為方式選擇模型,對模型進行了參數估計,并對模型的可靠性進行了分析。
換道;競爭;協作;通行行為;城市道路
1 競爭協作通行行為描述
競爭與協作通行行為是指交通實體在道路交通環境中為實現快速通行的目的,與其他交通實體所展開的爭奪速度、空間領先所表現出來的駕駛行為,主要指競爭與協作。道路交通資源有限的情況下即道路交通發生車輛排隊、交通擁堵、車流變化等過程時所產生的換道過程常伴隨競爭/協作通行行為的發生,車輛換道基本場景如圖1所示。

圖1 換道行為基本場景
根據追求利益動機的不同,該通行行為表現為競爭和協作兩種形式。競爭/協作通行行為過程如圖2所示。
協作通行行為:車輛在道路行駛時,為了達到快速通行的目的而導致換道的行為。此換道過程中前導車和跟隨車通過減速或切換到其他車道而讓行于換道車。
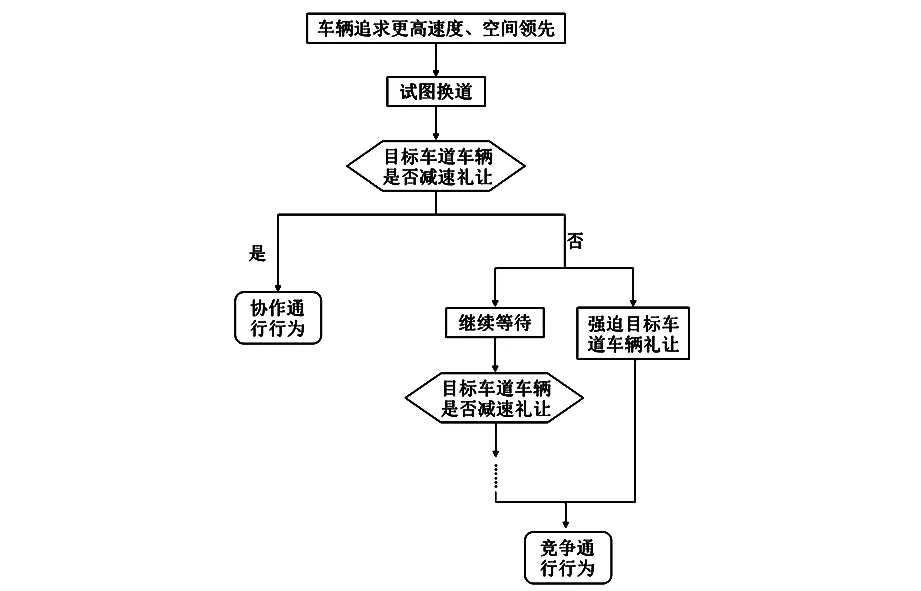
圖2 競爭/協作通行行為過程描述
競爭通行行為:車輛在道路上行駛時,為達到期望行駛速度或者爭奪空間領先而導致換道的通行行為。此換道過程中,當換道車發出換道請求時,前導車或者跟隨車在第一時間并沒有做出禮讓行為,那么換道車輛則一直在尋求各種合適的換道機會,包括減速、加速甚至停下等待或者強迫目標車道車輛減速讓道而并入目標車道,如果目標車道前導車和跟隨車依然沒有配合其減速或換道,那么換道車輛需要停在該位置等待合適的時機再進行換道,使得換道行為往復產生,這種換道行為會對目標車道車輛的運行產生明顯的干擾。
2 競爭/協作通行行為方式選擇建模
2.1 變量的選取
(1)因變量。車輛在城市道路上運行時,通過換道的方式獲得更快的速度或者空間領先,這一過程中出現車輛之間的相互作用則產生競爭/協作通行行為。本文以競爭/協作通行行為的選擇結果為因變量。將其分為競爭通行行為和協作通行行為2類,編碼如表1所示。

表1 因變量編碼
因變量只取0、1時,由于是型Bernoulli隨機變量,則如下概率分布
P(yi=1)=πi
(1)
P(yi=0)=1-πi
(2)
根據離散型隨機變量期望值定義,可得
E(yi)=1(πi)+0(1-πi)=πi
(3)
可推出
E(yi)=πi=β0+βixi
(4)
所以,作為由回歸函數給定的因變量均值,E(yi)=β0+βixi是自變量水平為時的概率,即為選擇競爭通行行為的概率。
(2)自變量。競爭/協作通行行為在車輛相互作用的換道過程中產生的,影響因素可以概括為換道車輛自身因素、周圍車輛因素和相互作用因素。自身因素包括換道車速度、加速度等,周圍車輛因素包括前導車速度、前導車加速度、跟隨車速度、跟隨車加速度;相互作用因素包括前導車與換道車的換道可接受間隙、跟隨車與換道車的換道可接受間隙、前導車與換道車速度差、加速度差、跟隨車與換道車的速度差、加速度差等。
2.2 模型建立
(1)變量選擇。運用正向選擇法對自變量進行逐步篩選,得出在0.05的顯著性水平下的自變量有換道車速度、跟隨車速度、前導車速度、跟隨車與換道車的換道可接受間隙、前導車與換道車的加速度差。
(2)參數估計。對提取快速路基本路段的車輛換道過程的運行軌跡數據進行分析,得出擬合結果如表2所示。
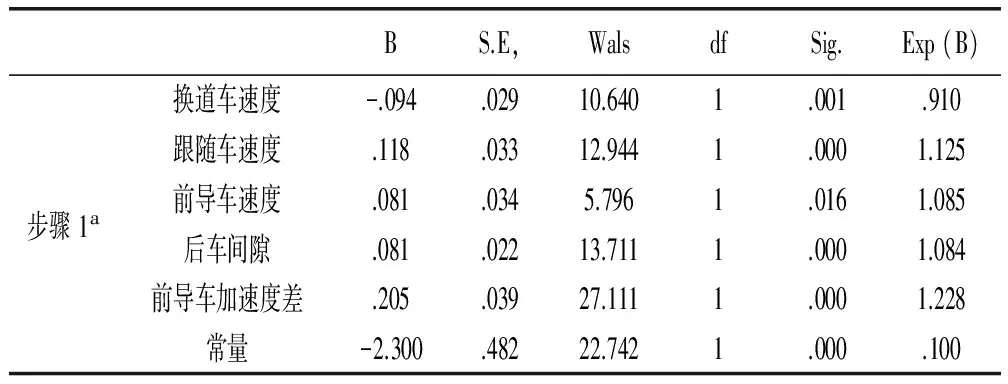
表2 方程中的變量
a. 在步驟 1 中輸入的變量: 換道車速度,跟隨車速度,前導車速度,后車間隙,前導車加速度差。
從表2可得以下模型表達式

(5)
P協=1-P競
(6)
式中:VH為換道車速度;VG為跟隨車速度;VQ為前導車速度;GH為后車間隙;ADQ為前導車加速度差。
2.3 模型檢驗
模型估計系數的相關系數矩陣如表3所示,
從表3中我們可以看出各個估計系數之間的線性相關關系。各個系數之間的線性相關性都是較小的,因此各個參數之間的解釋力不會受到太大的影響,說明該模型較為理想。

表3 相關矩陣

表4 Hosmer和Lemeshow檢驗
表4為H-L檢驗表,P=0.177 005,認為該模型能很好地擬合數據。
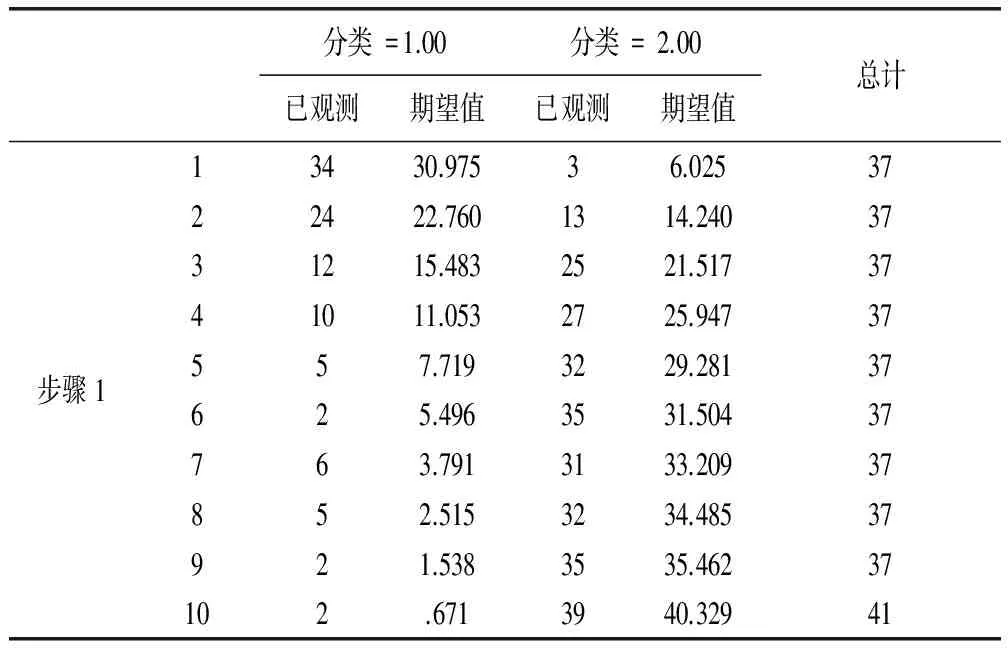
表5 Hosmer和Lemeshow檢驗的隨機性表
表5為H-L檢驗的隨機性表,表中觀測值與期望值大致相同,可以直觀認為,該模型擬合度較好。說明建立的二元Logit模型的預測能力較好。
3 結 論
(1)通行行為是在車輛換道過程中換道車與周圍車輛之間的相互作用影響下產生的。將通行行為分為競爭和協作兩種。在客觀因素方面選取了車輛換道過程的運動軌跡參數,即換道車與前導車、跟隨車的速度、加速度,可接受間隙等因素,分析自變量與因變量之間的關系。二元Logit選擇模型很適合應用于定性因變量與自變量之間的關系描述。
(2)采用混合逐步選擇法分析候選變量與因變量是否存在顯著相關性。研究發現換道車、前導車、跟隨車速度、后車間隙、前導車加速度差與競爭/協作通行行為方式選擇顯著相關。其他因素則與通行行為方式選擇相關性不大。
(3)采用Logit回歸模型,建立競爭/協作通行行為方式選擇模型并對其進行了檢驗,結果表明,該模型擬合效果較好。
(4)由于數據有限,本文并未考慮競爭/協作通行行為產生過程中車輛之間的橫向作用,而車輛之間的橫向作用也是影響車輛競爭/協作通行方式選擇的一個重要因素,因此下一步需要對競爭/協作通行行為的換道過程進行細化研究。為無人駕駛車輛的車輛傳感系統提供理論依據,從而使無人駕駛車輛能夠更加安全、可靠的在道路上行駛。
[1] 鄺先驗. 城市混合交通流微觀仿真建模研究[D]. 廣州:華南理工大學土木與交通學院,2014.
[2] 曲大義,陳文嬌,楊萬三,等.車輛換道交互行為分析和建模[J].公路交通科技,2016,33(6):88-94.
U491.3
C
1008-3383(2017)11-0163-02
2017-05-13
王長虹(1990-),女、河北邢臺人,研究方向:交通行為。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
