城軌塞拉門虛擬樣機建立方法研究
2018-01-02 08:45:12王亞東王祖進
軟件 2017年12期
王亞東,王祖進
(南京康尼機電股份有限公司,江蘇 南京 210038)
城軌塞拉門虛擬樣機建立方法研究
王亞東,王祖進
(南京康尼機電股份有限公司,江蘇 南京 210038)
基于RecurDyn和Matlab/Simulink的機電聯合仿真分析功能,模擬了城軌塞拉門的開關門過程,提出了一種城軌塞拉門虛擬樣機建立方法。首先建立機械系統仿真模型,然后采用速度、電流雙閉環控制建立控制系統仿真模型,再將機械系統與控制系統相結合建立機電聯合仿真模型。對仿真模型進行仿真分析,將仿真結果和實驗結果進行對比,根據對比結果對機械系統和控制系統的仿真模型進行修正。最后對塞拉門的部分亞健康工況進行了仿真模擬,進一步驗證了機電聯合虛擬樣機的正確性。
塞拉門;虛擬樣機;機電聯合仿真;控制系統仿真;無刷直流電機
0 引言
傳統的軌道塞拉門設計常采用方法是先進行門系統的需求分析,然后生產研制出樣機,然后再進行門系統的工作運行實驗,當通過實驗發現問題時,需要修改設計,再加工樣機,再進行樣機實驗,如此反復進行,設計開發過程周期長、成本高。
隨著計算機技術的快速發展而發展起來的控制系統虛擬樣機技術[1-4],是以控制理論為核心,加上成熟的三維計算機圖形技術和基于圖形的用戶界面技術,將分散的設計和分析技術集成在一起對設計產品進行虛擬性能測試的一種高新技術。它可以在很短時間內完成多次物理樣機無法完成的仿真試驗,分析不同的設計方案,直至獲得樣機模型整機系統的優化方案。另外,還能夠進行系統不同工況的試驗,如不同溫度下的性能測試等。利用虛擬樣機技術不但可以降低開發成本、縮短開發周期,而且可以極大地提高產品設計的質量[5-6]。
因此,本文采用虛擬樣機技術,建立塞拉門的虛擬樣機仿真平臺,解決通過樣機實驗進行設計以及機械工程師和電氣工程師分開設計的缺陷,提供一種軌道交通車輛塞拉門虛擬樣機建立方法,真實地反映軌道車輛塞拉門的運動機理,研究機械系統和控制系統間性能的相互影響,從機電一體化的角度解決機械工程師與控制工程師的設計協作問題,使門系統設計在機械、電子與控制各方面達到良好匹配,為門系統的研發提供一套科學完整的方法,提高產品的研發速度。
1 建立機械系統仿真模型
1.1 建立三維裝配模型
在SolidWorks軟件環境下,對城軌塞拉門進行三維建模和裝配,并將裝配模型轉換為 RecurDyn可導入的.x_t格式文件。城軌塞拉門主要由承載驅動機構、平衡輪組件、門扇、下擺臂組件、上滑道組件等組成,如圖1所示。承載驅動機構通過電機驅動絲桿,從而帶動鎖閉組件進行運動,鎖閉組件通過傳動架、鉸鏈座、滑筒以及攜門架將驅動力傳遞到門扇上,從而驅動門扇實現開關門動作。
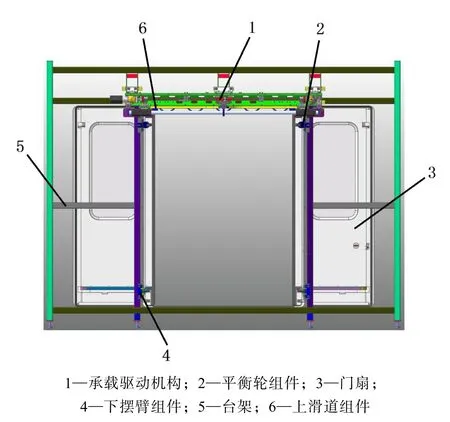
圖1 城軌塞拉門三維裝配模型
1.2 運動關系設置
對仿真模型中各零部件間的約束副進行設置[7-8],主要零部件間的約束關系如表1所示。
1.3 接觸參數設置
對門系統中的接觸副進行定義,具體包括:鎖閉組件和絲桿間的接觸、鎖閉組件內的接觸、尼龍滾輪和上滑道間的接觸、擺臂滾輪和下導軌間的接觸、平衡輪和門扇上壓板間的接觸,接觸類型采用Geo Surface Contact,接觸參數設置如表2所示,其中K為接觸剛度、C為接觸阻尼、ud為動摩擦系數、us為靜摩擦系數、d為最大穿透深度、e為剛度指數。
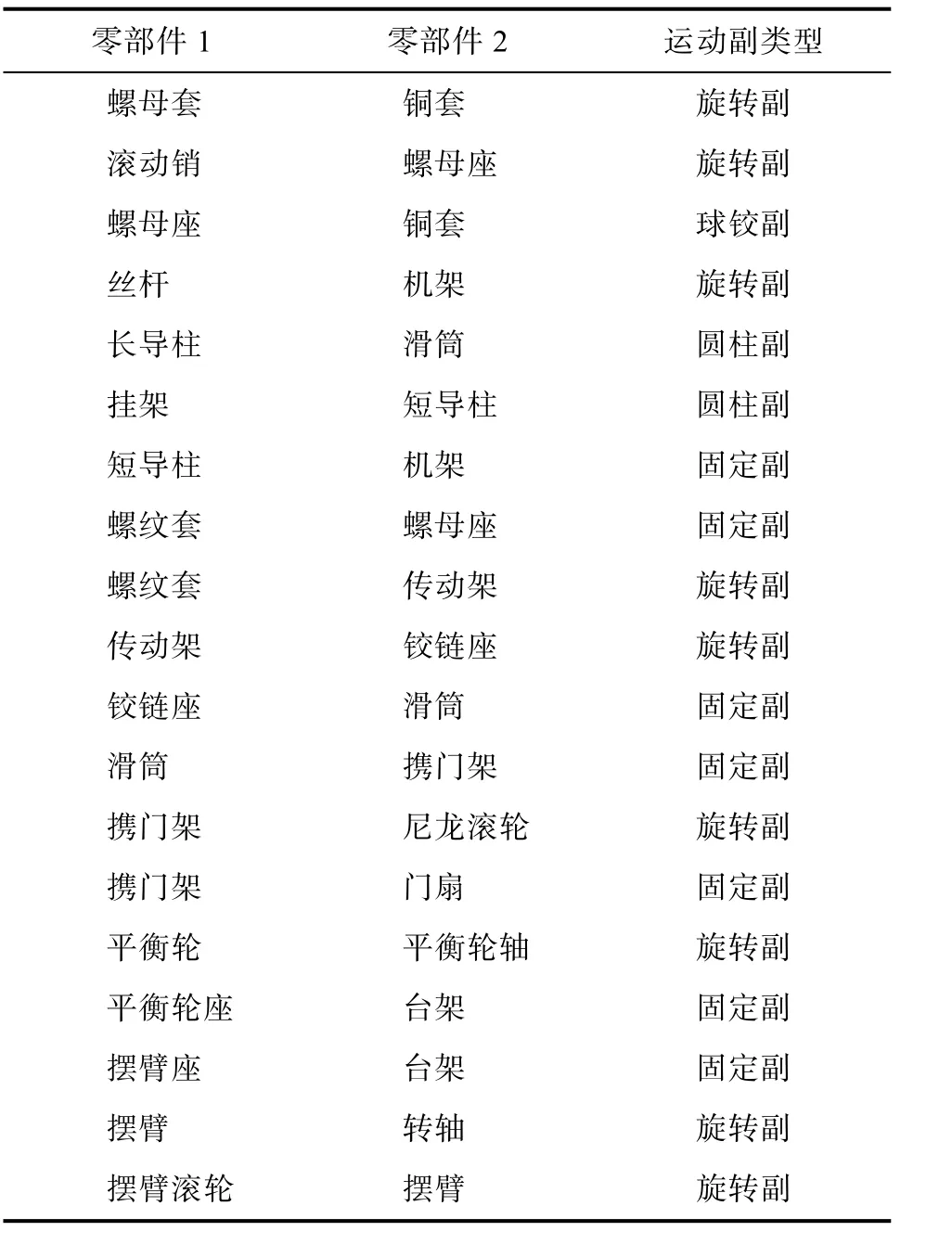
表1 主要零部件間的約束關系
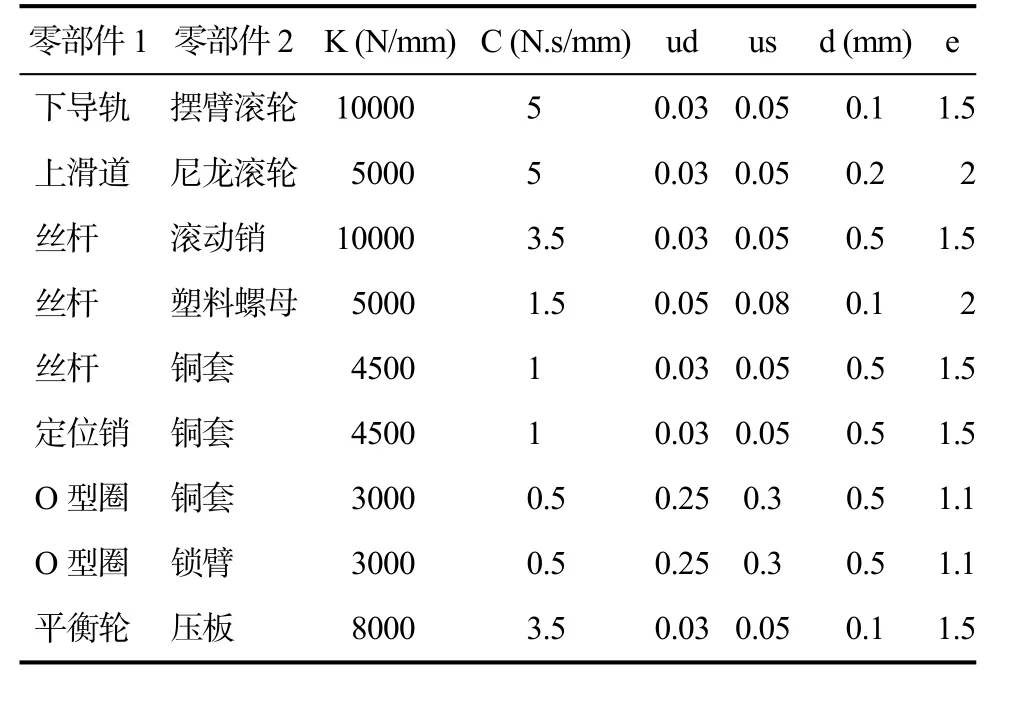
表2 接觸副參數設置
2 建立控制系統仿真模型
2.1 建立電機仿真模型
在Matlab/Simulink軟件環境下,對直流無刷電機進行建模,包括:電機本體建模、三相逆變器建模、換向邏輯控制建模、轉速控制建模等。其中采用永磁同步電機模塊來搭建直流無刷電機,選用直流電壓源,三相逆變器采用Universal Bridge模塊,換向邏輯控制模塊利用三個霍爾傳感器信號、PWM信號和轉速信號組合解碼生成逆變橋開關器件的控制信號,整個控制系統采用PWM調速。
2.2 雙閉環控制
城軌塞拉門控制系統采用的是速度和電流雙閉環控制[9-11],根據實際門控器的控制邏輯建立雙閉環控制系統仿真模型,包括:內環電流PI控制和外環速度PI控制,如圖2所示。
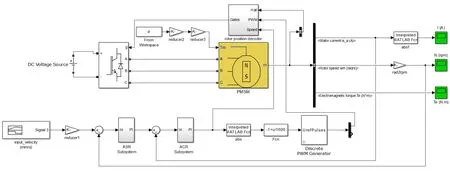
圖2 雙閉環控制系統
3 建立機電聯合仿真模型
首先,在機械系統仿真模型中建立輸入與輸出,其中輸入為絲桿的轉速,輸出為門系統實現開關門動作所需的驅動扭矩。建立M文件,設置采樣周期為1 ms。然后,運行Matlab程序,將工作路徑設置為 M 文件和 RecurDyn機械模型的存儲目錄。在Matlab命令窗口中輸入M文件名,接著輸入rdlib,彈出包括RecurDyn Plant Block的Simulink窗口。打開一個新的 Simulink模型窗口,并把 RecurDyn Plant Block拖至該窗口。最后,定義控制系統框圖。
4 仿真分析及模型修正
4.1 開門仿真分析
設置采樣時間為5×10-7s,設置仿真時間為3s,對機電聯合仿真模型進行仿真分析,得到電機的轉速曲線和電機的驅動電流曲線。將仿真結果與實驗結果進行比較,如圖3和4所示。若電機轉速和電機電流的誤差小于20%,說明所建模型的準確性及仿真分析的可行性;若兩者誤差大于20%,說明所建模型與真實模型存在較大的誤差,調整模型參數,直至兩者誤差小于20%,至此,得到開門的虛擬樣機模型。
4.2 關門仿真分析
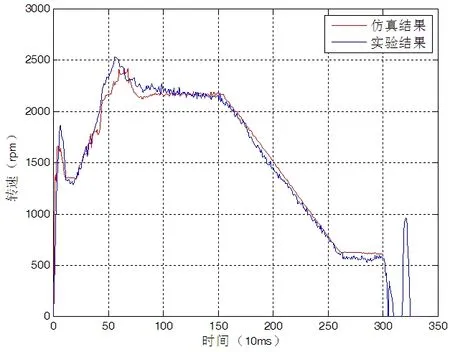
圖3 電機轉速的結果對比
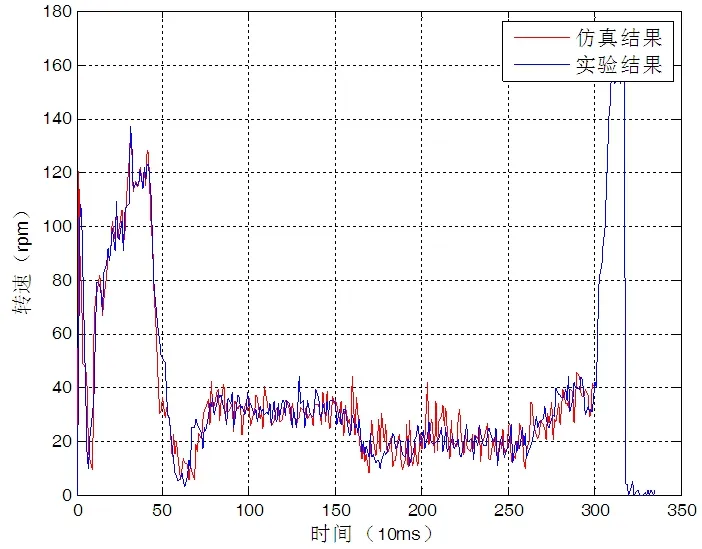
圖4 電機電流的結果對比
設置采樣時間為5×10-7s,設置仿真時間為3s,對機電聯合仿真模型進行仿真分析,得到電機的轉速曲線和電機的驅動電流曲線。將仿真結果與實驗結果進行比較,如圖5和6所示。若電機轉速和電機電流的誤差小于20%,說明所建模型的準確性及仿真分析的可行性;若兩者誤差大于20%,說明所建模型與真實模型存在較大的誤差,調整模型參數,直至兩者誤差小于20%,至此,得到關門的虛擬樣機模型。
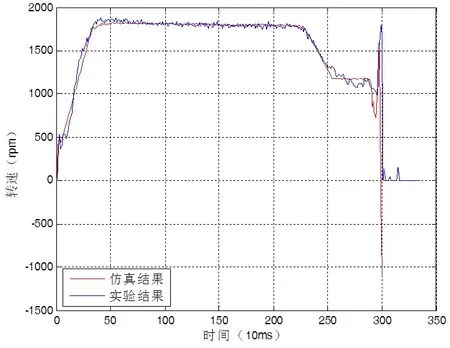
圖5 電機轉速的結果對比
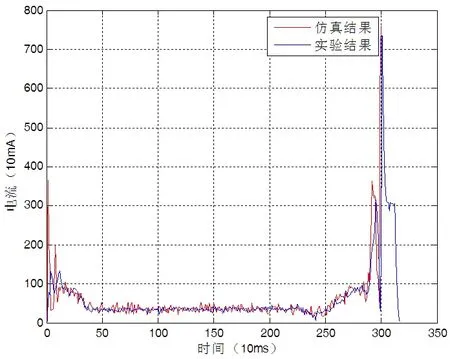
圖6 電機電流的結果對比
4.3 模型修正
模型修正包括機械系統模型修正和控制系統模型修正。其中,機械系統模型修正主要是對部分運動位置的運行阻力進行了修正,使得門系統在開關門過程中的運行阻力是變化的,這樣設置符合門系統的實際運行工況。控制系統模型修正主要是對各個運動階段的PI參數和限幅值進行修正,使得電機的轉速和電流輸出與實驗數據更加吻合,進一步提高仿真模型的精度。
5 虛擬樣機驗證
5.1 關門高速段局部阻力亞健康模擬
通過對正常開關門的局部施加壓力模擬真實情況中的開關門所受的局部壓力。首先,對關門高速段局部阻力進行機電聯合仿真分析。設置采樣時間為 5×10-7s,設置仿真時間為 3s,對關門高速段局部阻力仿真模型進行仿真分析,得到電機的轉速曲線和電機的驅動電流曲線。將仿真結果與實驗結果進行比較,如圖7和8所示。根據仿真和實驗的結果對比,可以看出關門高速段局部阻力仿真模型具有很高的精度。
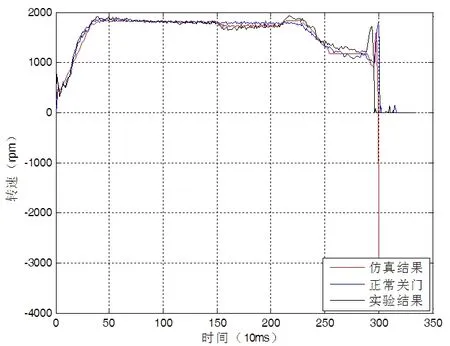
圖7 電機轉速的結果對比
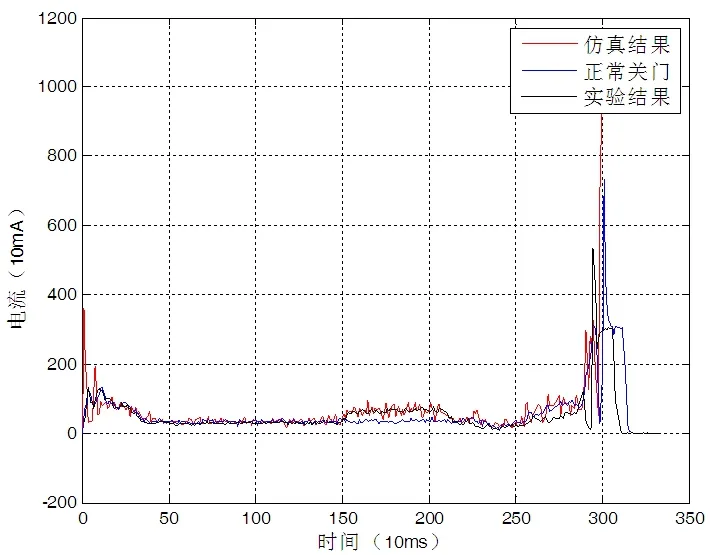
圖8 電機電流的結果對比
5.2 開門高速段局部阻力亞健康模擬
對開門高速段局部阻力進行機電聯合仿真分析。設置采樣時間為5×10-7s,設置仿真時間為3s,對開門高速段局部阻力仿真模型進行仿真分析,得到電機的轉速曲線和電機的驅動電流曲線。將仿真結果與實驗結果進行比較,如圖9和10所示。根據仿真和實驗的結果對比,可以看出開門高速段局部阻力仿真模型具有很高的精度。
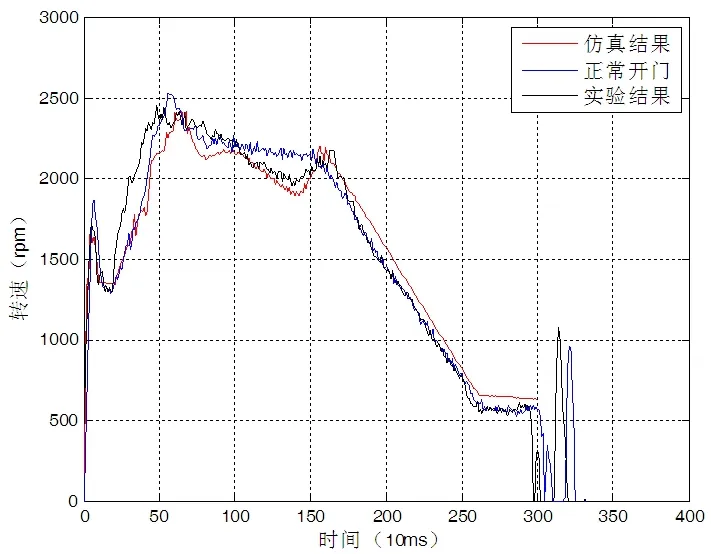
圖9 電機轉速的結果對比
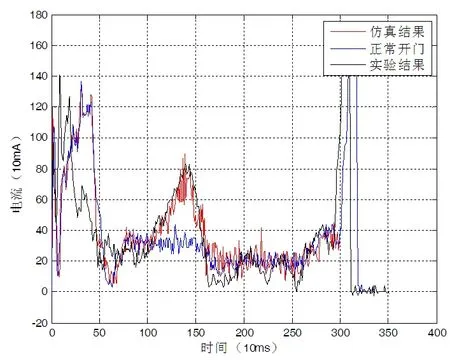
圖10 電機電流的結果對比
6 結論
基于RecurDyn和Matlab/Simulink的機電聯合仿真功能,提出了一種城軌塞拉門機電聯合虛擬樣機建立方法。對整個門系統的開關門過程進行了機電聯合仿真,得到了電機的輸出轉速和驅動電流,并與實驗數據進行了對比,根據對比結果對機械系統和控制系統的模型參數進行了修正,并通過故障模擬和亞健康工況模擬對虛擬樣機模型進行了驗證,最終得到了高精度的機電聯合虛擬樣機模型。文中方法避免了傳統分析方法需要在實際樣機完成后才能進行的缺點,直接通過計算機虛擬環境就可以定量、準確分析門系統的性能,可大大降低開發成本、縮短開發周期,降低產品開發的風險。該方法還可以推廣應用到其他類似的復雜控制系統的仿真分析中,實現快速、高質量、低成本的設計目標,具有很高的參考價值。
[1] 袁亮, 于春梅. 虛擬樣機環境下機械臂模型驗證與控制系統仿真[J]. 機械設計與制造, 2016, (5): 5-8.
[2] 于春梅, 易奎, 侯惠讓, 等. 基于虛擬樣機技術的控制系統實驗平臺開發[J]. 實驗技術與管理, 2014, 31(2): 82-84.
[3] 周進, 張東升, 梅雪松, 等. 基于虛擬樣機技術傾轉四旋翼飛行器聯合仿真[J]. 計算機仿真, 2015, 32(1): 94-98.
[4] 張靜波, 程力, 胡慧斌, 等. 基于虛擬樣機的反后坐裝置故障仿真技術研究[J]. 計算機測量與控制, 2012, 20(5):1287-1289.
[5] 王蕾. 虛擬樣機技術在某懸架系統設計中的應用[J]. 汽車工業研究, 2017, (4): 54-59.
[6] 湯曉燕, 劉少軍, 云忠. 基于虛擬樣機技術的深海采礦主動式升沉補償系統設計[J]. 北京工業大學學報, 2008,34(5): 454-458.
[7] 趙慶松, 孫偉. 震實式造型機工作臺翻轉機構的設計與運動仿真[J]. 現代制造技術與裝備,2015, (2): 24-25.
[8] 黃繼承, 李顯旺, 沈成, 等. 苧麻聯合收割機切割器的運動仿真和結構分析[J]. 中國農機化學報, 2013, 34(6):170-173.
[9] 程啟明, 楊小龍, 高杰, 等. 基于參數可變PID控制器的永磁無刷直流電機轉速控制系統[J]. 電機與控制應用, 2017,44(1): 18-22.
[10] 徐志書, 李超, 何雨昂. 基于Matlab/Simulink方波直流無刷電機位置伺服仿真研究[J]. 電子技術與軟件工程, 2016,(10): 136-137.
[11] 魏江鵬, 文程祥, 涂世軍. 基于Matlab的永磁無刷直流電機仿真控制系統[J]. 裝備制造技術, 2016, (12): 47-48.
Research on the Establishment Method of the Virtual Prototype of the City Track Sliding Plug Door
WANG Ya-dong, WANG Zu-jin
(Nanjing Kangni Mechanical&Electrical Co., Ltd, Nanjing 210038, China)
Based on the electromechanical co-simulation function of RecurDyn and Simulink, the opening and closing process of the sliding plug door was simulated, and an establishment method of the virtual prototype was proposed. Firstly, the simulation model of the mechanical system was established, then the speed and current double closed-loop control was used to simulate the control system. The mechanical system was combined with the control system to establish the electromechanical co-simulation model, then the co-simulation model was simulated and analyzed, and the simulation results were compared with the experimental results. According to the comparison results, the simulation models of the mechanical system and control system were modified. Finally, the simulation of the partial sub-health conditions of the sliding plug door were carried out, which further verified the correctness of the electro-mechanical integration virtual prototype.
Sliding plug door; Virtual prototype; Electromechanical co-simulation; Control system simulation;DC brushless motor
TP391.9
A
10.3969/j.issn.1003-6970.2017.12.059
本文著錄格式:王亞東,王祖進. 城軌塞拉門虛擬樣機建立方法研究[J]. 軟件,2017,38(12):291-295
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52