RTK技術在工程測量中的應用研究
2018-01-02 03:20:30楊凱
海河水利 2017年6期
楊凱
(海河水利委員會海河下游管理局,天津300061)
RTK技術在工程測量中的應用研究
楊凱
(海河水利委員會海河下游管理局,天津300061)
工程測量的準確度直接影響工程的質量、安全、功能。隨著GPS測繪技術的發展,RTK技術逐步成熟,在工程放樣、大地測量、海洋測量、航空測量等領域得以推廣且測量過程中可實時提供厘米級精度的三維坐標。介紹RTK技術的發展現狀、工作原理、試驗步驟,以V60 GNSS RTK為例開展實地測量并對測量數據誤差進行分析。試驗證明,RTK測量精度可達到0.01 m以內,并結合單頻測深儀進行水下測量完成地形測繪工作。RTK技術具有精度高、質量好、減少外業勞動強度、提高效率等優點,可在水利工程測量中推廣應用。
GPS技術;RTK技術;工程測量;檢驗校驗;水下測量
1 引言
在水利工程建設中,測量的精度決定工程項目的質量、安全及功能。隨著社會發展,水利工程規模日益擴大,對測量精度的要求越來越高。測量儀器經歷了從經緯儀、水準儀等傳統光學儀器到以全站儀、電子水準儀為主的電子儀器的過渡,測量精度和效率逐步提高[1]。GPS(Global Position?ing System)技術是由美國國防部建立的一套全球定位系統,可提供連續、實時、動態、高精度導航定位信息,為工程測量、海洋測繪等提供高精度的測量手段。
近年來,隨著GPS技術的不斷發展,人們提出RTK這種新型的GPS測量技術。RTK技術是一種能夠在野外實時得到厘米級定位精度的測量方法,它的出現為工程放樣、地形測繪、各種控制測量帶來新的曙光,極大地提高了野外作業效率[2]。因此,筆者主要以中海達公司V60 GNSS RTK為例,分析了其技術發展情況和測量中的部分關鍵點,開展實地測量并對測量數據誤差進行分析。試驗證明,RTK測量精度可達到0.01 m以內,并結合單頻測深儀進行水下測量完成地形測繪工作。
2 RTK技術現狀
RTK(Real-time Kinematic)載波相位差分技術,是實時處理2個測量站載波相位觀測量的差分方法[3]。它通常由以下部分組成:①基準站;②移動站;③無線電臺;④發射天線;⑤供電電瓶。
基準站架設在已知的固定點上,通過無線電臺發射載波相位信號,移動站同時接收電臺信號和GPS衛星信號兩路信號,進行差分計算獲得兩點間的相對位置關系,從而得到移動站所在位置的三維坐標信息。
3 RTK測量關鍵點
3.1 試驗方法及步驟
(1)基準站的選定和建立。基準站設置應滿足GPS靜態觀測的要求,還應將天線架設在地勢較高、四周相對開闊的樓頂位置,便于信號發射。基準點可設在已知坐標點上。
(2)地方坐標轉換參數計算。根據已知點和測量點的三維坐標,進行七參數轉換,為RTK測量做準備。至少選取3個以上控制點進行參數計算,選取2個以上控制點進行校驗檢驗。控制點應均勻分布在測區范圍內,以減小參數轉換誤差。
3.2 接收機主要性能
接收機以中海達公司V60 GNSS RTK系統(以下簡稱V60)為例,如圖1所示,其主要性能指標見表1。該設備定位精度如下:平面±(8+1×10-6D)mm(D為被測點間距離),高程±(15+1×10-6D)mm。該設備靜態定位精度如下:平面±(2.5+1×10-6D)mm,高程±(5+1×10-6D)mm[4]。

圖1 V60系統

表1 RTK接收機性能指標
V60有兩種工作模式,分述如下。
(1)V60具備使用外掛UHF數據鏈基準站模式,使用外掛電臺作業時基準站使用該模式,其中外掛電臺為單發外掛電臺,功率5、10、20、30 W可調,頻道116個頻段可調。
(2)V60使用內置UHF電臺的移動站模式,使用電臺作業時移動站使用該模式,其中內置收發一體電臺,功率1、2、5 W可調,頻段450~470 MHz,傳輸速率19.2、9.6 kbps可調,頻道116個頻段可調。
3.3 基準站架設
基準站架設主要包括V60、外掛電臺、吸盤式發射天線、鉛蓄電池、三腳架等[5]。在已知坐標點上架設基準站,設備連接方式如圖2所示,電臺、基準站接收機分別開機進行初始化工作;使用iHand智能手簿,新建工程,并設置工程參數,如坐標系選取等,通過藍牙方式連接V60終端,將設備設置為基準站,并在架設點位進行平滑處理。
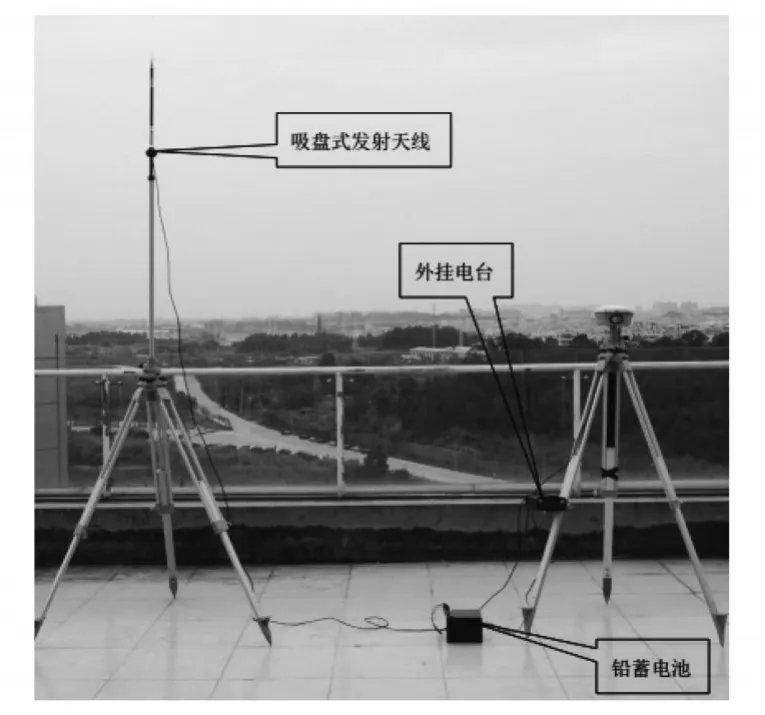
圖2 基準站架設示意
基準站架設主要依照以下要求進行:①基準站選擇在較為開闊區域,高度角≥15°;②基準站盡量架設在測區制高點上,有利于信號傳播;③基準站應遠離電磁干擾,盡量避開高壓輸電線路、微波通信鐵塔等設施;④測量作業盡量選擇在天氣情況較好的時間開展,避免因大風陰雨造成信號丟失;⑤基準站作業期間不得移動位置,不得關機重啟,如移動或重啟需要重新進行校驗檢驗;⑥基準站開始工作,應注意電臺頻道和信號收發指示燈工作狀態;⑦鉛蓄電池注意正負極連接,注意防雨防水措施。
3.4 移動站架設
使用iHand智能手簿連接移動站主機,連接方法與基準站連接相同。連接完成后,將設備設置為移動站;電臺工作模式選擇使用移動站內置電臺,輸入電臺頻道,確保與基準站通信正常;根據測桿刻度,修改天線高度,完成移動站基本設置。
移動站使用時應注意以下幾點:①測量開始前,首先要確保手簿與移動站主機藍牙連通;②通過iHand手簿查看移動站電源情況,確保工作時間;③選擇3個或以上的已知點進行坐標轉換,得到七參數;④選取測區范圍內的其它已知點進行校驗檢驗;⑤測桿高度一般設置為2 m進行測量作業,當高度改變時應修正。
4 RTK測量
4.1 RTK單點測量步驟
(1)將基準站架設在已知基準點上,架高發射天線,連接線纜,打開外置電臺、基準站主機電源,進行初始化設置。
(2)使用Hi-RTK Road軟件,新建工程,點擊GPS連接基準站進行設置,達到固定解,然后設置好坐標系統及中央子午線,在不帶任何參數的情況下對參與解算的控制點進行采集。
(3)連接移動站,修改天線高度。
(4)計算七參數。將已知控制點導入控制點庫,依照圖3步驟,選取3個已知國家坐標點進行七參數計算,結果如圖4所示,點擊“運用”;參數運用完后可在“橢球轉換”中查看,如圖5所示。
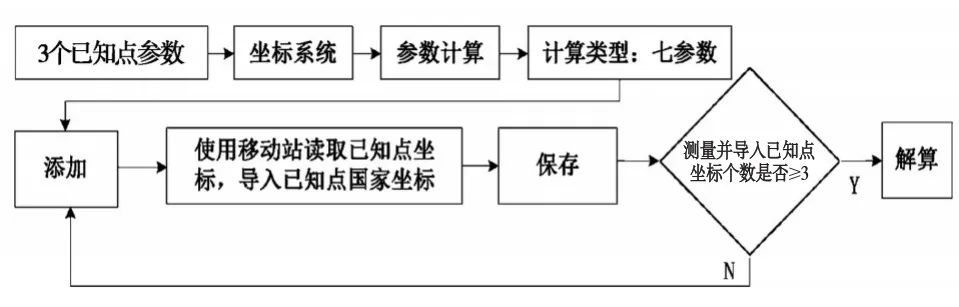
圖3 七參數解算過程

圖4 七參數解算結果
(5)校驗檢驗。將移動站架設在控制點1上,保持測桿上水平氣泡居中,在“坐標系統”中選擇點校驗,點擊平滑按鈕,10 s平滑過程完成后,導入控制點1坐標,計算得出改正值,完成校驗過程;將移動站架設在控制點2上,保持測桿上水平氣泡居中,點擊Ent測量該點坐標,與已知坐標進行比對,當誤差在10-2m范圍內時,完成檢驗過程。

圖5 橢球轉換
(6)使用移動站對5個待測已知點進行測量,每個點測量5次,將5次數據進行算數平均,得到RTK測量值。
4.2 測量結果
已知點坐標、RTK測量結果和對比結果,見表2。
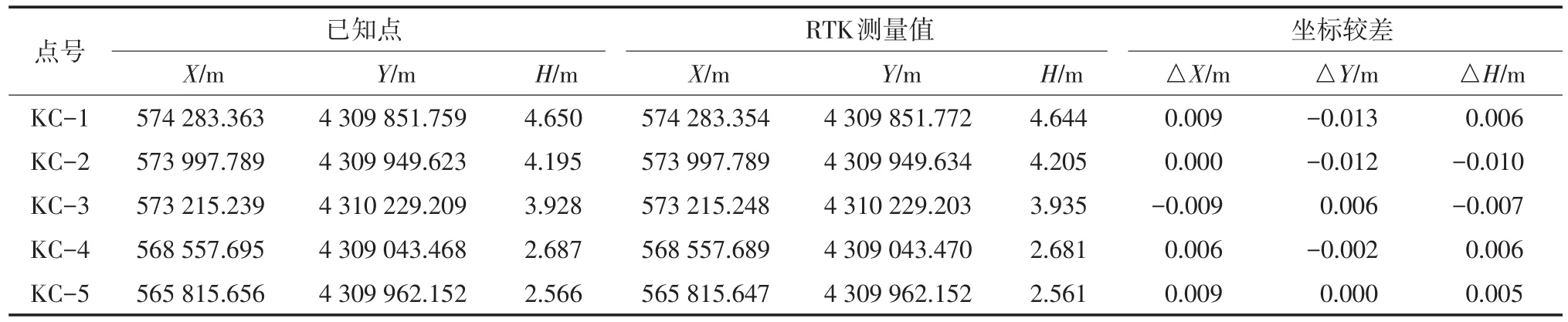
表2 試驗結果對比
在5個已知點X、Y、H坐標與RTK測量值對比發現,大于0.01 m的坐標值有3個,其余12個坐標值均小于0.01 m,其中最大差值為0.013m、最小差值為0 m。
5 與測深儀進行水下地形測繪
5.1 測量原理
以HY1700單頻測深儀(以下簡稱HY1700)為例,HY1700由發射接收模塊、量化模塊、顯控模塊和電源模塊組成,通信接口使用RS232與PC端進行雙向通信,探測精度可達所測深度±0.01m[6],具有攜帶方便、操作簡單、測量精度高、實時記錄水深數據并進行保存等優點,主要性能參數見表3。HY1700由以下部分組成:①測深儀主機;②換能器;③測桿。
換能器是HY1700的最前端設備,將電信號轉換為高強度穩定的探測聲波,向水中發射,遇到底部或障礙物時進行反射,換能器實時采集反射信號,濾除噪聲,將反射聲波轉換為電信號反饋給測深儀主機[7]。
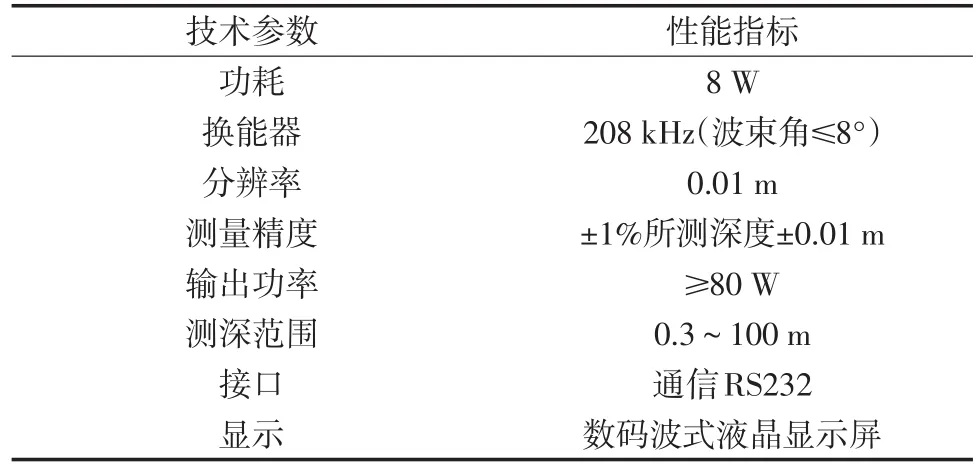
表3 HY1700性能參數
探測主機對電信號進行數據處理,計算換能器底部到水底距離的公式為:

式中:C為探測聲波聲速(m/s),通過聲速儀獲取;t為換能器從發射聲波到接收反射信號的時間(s)。
之后,將水深數據顯示在主機顯示器上,同時通過RS232傳輸并儲存在PC端,如圖6所示。
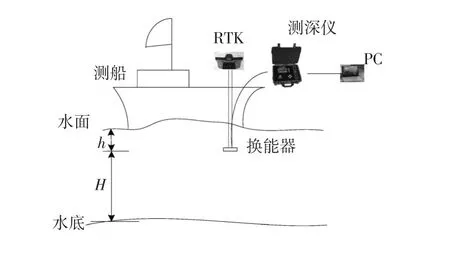
圖6 測深儀基本工作原理
安裝換能器時,將線纜穿過測桿,位置置于船龍骨附近,使用鉛絲固定,盡量保證測桿與水平面垂直,吃水高度應大于或等于0.3m,避免行船中換能器露出水面產生誤差。
水下高程換算如圖7所示,計算公式為:

式中:h0為RTK水面高程(m);h為換能器吃水深度(m);H為換能器底部到水底深度(m)。?
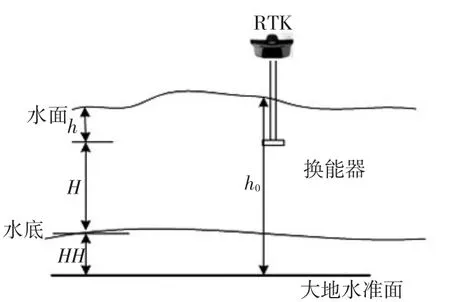
圖7 水下高程換算
5.2 數據采集及處理
保證RTK移動站與換能器在同一豎直軸線上,通過RTK獲得水下位置數據文件,通過測深儀獲得水深文件,并將保存坐標和水深信息的.ss文件通過數據線保存在PC端海洋測量軟件中。按照預設航跡線行船,定期保存.ss文件。
使用數據后處理軟件,獲取任務,采集水深取樣,將.ss文件導入軟件,進行平滑處理,剔除數據異常點;通過測區內水下高程點繪制水下等高線,然后生成水下地形圖。
6 結語
與傳統測量方法相比,RTK技術可以實時測量得到目標點的三維坐標,具有高效、靈活、快速、準確等優點,給工程測量帶來極大的便利,可以減輕野外作業中操作人員的工作量,提高作業效率。但同時,RTK技術會受到天氣情況、衛星信號、無線電干擾等因素的制約,在使用中要注意把握,保證測繪工作的開展。
[1]孫其鵬.RTK與全站儀聯合測圖的實際應用[D].長春:吉林大學,2016:5-7.
[2]楊文府,崔玉柱.GPS-RTK的技術方法探討與對策[J].測繪工程,2008,17(4):50-53.
[3]張虎龍.RTK測量精度測試方法研究[J].計算機與數字工程,2016,44(12):2503-2507.
[4]中海達測繪儀器有限公司.V60 GNSS RTK系統說明書[Z].廣州:中海達測繪儀器有限公司,2014.
[5]翟翠允,段凌燕,耿志軍,等.RTK測量中基準站的設置問題[J].海洋測繪,2007,27(3):63-65.
[6]無錫海鷹加科海洋技術有限公司.HY1700測深儀使用說明書[Z].無錫:無錫海鷹加科海洋技術有限公司,2009.
[7]程劍剛.網絡RTK聯合聲波測深儀在水下地形測量中的應用[J].測繪工程,2014,23(3):63-65.
P228.4;TV221
A
1004-7328(2017)06-0051-04
2017—07—25
楊凱(1987—),男,碩士,工程師,主要從事水利電子通信工程和網絡信息化工作。
10.3969/j.issn.1004-7328.2017.06.015
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
太空探索(2016年6期)2016-07-10 12:09:06
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43