大型海洋資料浮標波浪能供電裝置數值模擬研究
2018-01-03 07:39:12劉野丁圓強趙環宇柴輝趙強徐宇柘姜峰
山東科學 2017年6期
關鍵詞:系統
劉野,丁圓強,趙環宇,柴輝,趙強,徐宇柘,姜峰
(1.山東省海洋環境監測技術重點實驗室,山東省科學院海洋儀器儀表研究所,山東 青島 266001;2.國家海洋局南海分局,廣東 廣州 510310)
大型海洋資料浮標波浪能供電裝置數值模擬研究
劉野1,丁圓強1,趙環宇1,柴輝1,趙強1,徐宇柘1,姜峰2
(1.山東省海洋環境監測技術重點實驗室,山東省科學院海洋儀器儀表研究所,山東 青島 266001;2.國家海洋局南海分局,廣東 廣州 510310)
本文以10 m大型海洋資料浮標為研究對象,分析了可適應其結構特點的波浪能供電機構。通過數值模擬計算了10 m浮標體的垂蕩波浪力以及橫搖角度,同時計算了波浪能轉換為電能的輸出功率,輸出功率滿足海洋資料浮標蓄電池的充電電壓。最后提出了適用于此類海洋資料浮標的結構設計方案以及系統集成方案。該研究為今后海洋資料浮標波浪能供電裝置的研發提供了思路。
海洋資料浮標;波浪能供電;數值模擬;系統優化集成
海洋資料觀測系統以合理、高效地保護海洋環境為目的,進行海洋氣象水文資料預測及海岸管理。目前海洋資料觀測系統的主要類型包括海洋資料浮標觀測系統,半潛浮標觀測系統(Argo浮標),海底潛標系統,海床基系統,水下滑翔機,自主式水下機器人、航行器,深潛探測器以及對接移動平臺的海底觀測網絡等[1](圖1)。
大多數在位的海洋資料觀測系統采用傳感器自帶的電池進行自容式數據存儲(如海底潛標系統),少數海洋資料觀測系統通過太陽能進行能源補充(如海洋資料浮標觀測系統),隨著海洋觀測數據的多元化,觀測站位的深海化、極區化,搭載傳感器種類的多樣化,以及布放站位的天氣條件惡劣,系統電量消耗也隨之增大,傳統蓄電池獨立支撐以及現有的太陽能充電技術已難以繼續維持更加多功能的持久觀測系統。因此,以海洋可再生能源(波浪能、潮流能、溫差能等)為主要利用能源的海洋資料觀測多能互補智能供電方式應運而生[2]。
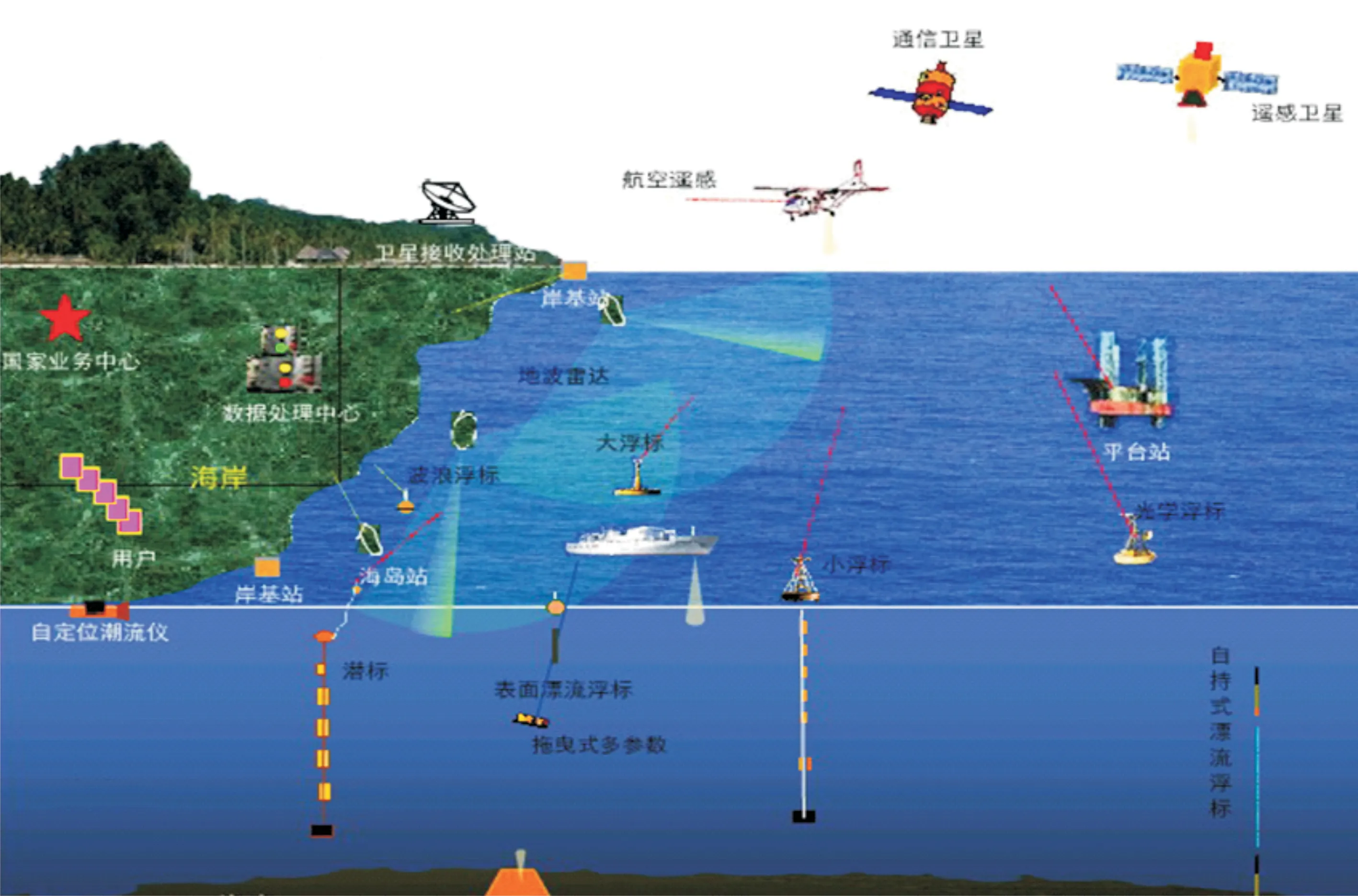
圖1 海洋氣象水文資料觀測系統Fig. 1 Oceanic meteorological and hydrological observation system
海洋可再生能源主要包括波浪能、潮流能、溫差能等多種通過海洋氣象水文要素而產生的可再生能源。由于海洋能的豐富性及其廣闊的應用前景,其發展必將經歷從補充能源到替代能源再到主流能源這樣的過程。同時,我國的海洋能研究進度較世界上其他先進國家落后,歐洲海洋能技術中心(EMEC)已經擁有達到并網裝機容量的海洋能發電裝置,我國的研究仍處于樣機的發展階段。因此,若要利用海洋可再生能源與海洋資料觀測系統供電,須按照“以原始創新帶動產品研發,以工程應用推動科學研究”的思路去著手海洋可再生能源裝置的開發。
在對海洋資料觀測系統供電時,應根據不同的觀測設備來設計相應的海洋可再生能源裝置,包括取用何種能源、能量的傳遞轉換方式、能源補給方式、裝置結構的設計以及錨固系統的設計等,由于不同海洋可再生能源工作原理不同,導致能量傳遞方式、樣機結構等差異較大,因此,針對不同的海洋可再生能源與海洋資料觀測系統的供電方式也不同。
本文以10 m圓盤大型海洋資料浮標以及已有的波浪能轉換機構為研究目標,從其當前及未來的用電需求出發,設計結構電控相匹配的合理的海洋能轉換機構,并通過數值模擬驗證其可行性,為波浪能供電裝置在海洋資料觀測系統上的應用提供設計依據。
1 海洋資料浮標波浪能供電機構
1.1 大型海洋資料浮標功耗情況
海洋資料浮標是搭載各種水文、氣象等探測儀器設備的海上浮式平臺,是我國近海及深遠海海洋動力環境觀測和監測的重要海上平臺,在我國海洋防災減災、海洋資源開發、海上交通和軍事活動等領域發揮著重要作用[3]。

圖2 10 m直徑大型海洋資料浮標Fig.2 The large ocean data buoy with 10 m diameter
如圖2所示的10 m圓盤結構大型海洋資料浮標可搭載常規氣象傳感器、剖面海流傳感器及少量水質類傳感器,部分常規傳感器功耗如表1所示,浮標系統每10 min完成一次數據采集、處理和通訊工作。供電方式為蓄電池及太陽能聯合供電,通用型海洋資料浮標通常選擇2 V 500 Ah 7組蓄電池串聯組成14 V 500 Ah的電池組,電池組具有過壓、過流保護功能。在滿足浮標基本觀測需求、并且在無任何能源補充的前提下,蓄電池可保持浮標無故障運行15天。
由表1可知常規水文氣象觀測設備1天時間的功耗總和為28.28 Ah,根據有關氣象資料顯示,我國沿海地區平均年日照總時數約為2 000 h,則平均日光照總時數為5.48 h/d,標準狀態下,非晶硅太陽能電池的單位電流與功率比是一定的,因此太陽能電池平均單位功率日發電量為0.38 Ah/(W·d),負載所需太陽能電池的功率為74.5 W,由于灰塵、氣候、蓄電池特性等因素影響,太陽能電池輸出功率需要通過1.2 ~ 1.5的系數進行修正,同時考慮蓄電池放電的允許程度為80%,因此常規海洋資料浮標所需加裝的太陽能電池板功率為140 W[4]。
環境溫度的變化對太陽能光電池的響應度有較大的影響,這是由于光吸收系數與溫度有關,從光電池的伏安特性曲線可以看出,一般情況下,負載電阻越大,輸出功率隨溫度的變化也越大,因此若浮標增加較多大功率傳感器,例如雷達、水聲類設備、高清視頻監控設備時,當前的太陽能供電方式在浮標空間限制、晝夜天氣變化、電能轉換效率等多方面因素的影響下,不能滿足這些高精度、多參數、多功能、大容量實時傳輸的海洋觀測傳感器的需求,因此“海能海用,就地取能”的海洋可再生能源成為了實現海洋資料浮標系統能源供給的首選方案。

表1 浮標基本水文氣象觀測系統傳感器工作情況
1.2 波浪能轉換機構
作為能量儲備最豐富的海洋可再生能源,波浪能是全世界被研究的最為廣泛的一種海洋可再生能源。歐洲海洋能技術中心(EMEC)根據波浪能轉換裝置的結構形式以及工作原理,將主流的波浪能發電裝置分為點吸收式、振蕩水柱式、聚波越浪式、浮力擺式、閥式、海蟒式、壓差式、轉子式等。美國海軍的水下觀測系統AN/SSQ-101計劃利用波浪能取代電池來進行持續供電,提高海洋資料觀測系統的續航能力[5]。
漂浮式的圓盤型海洋資料浮標具有獨特的結構以及良好的隨波性,因此在吸收利用波浪能時效果最為突出,且我國波浪能資源儲量豐富,適合作為海洋資料浮標的儲備能源之一。
近年來,在國家政策支持和資金大量投入下,我國的波浪能利用技術取得了較大的發展,但目前較為成熟的波浪能發電裝置多為獨立機構,能量轉換機構與海水直接接觸,抗臺風、腐蝕能力較差,安全性和可靠性難以保證,其供電方式也為分體式供電,諸多弊端導致海洋資料浮標供電技術尚未成熟,因此,結合海洋浮標系統自身的結構和運動特性,開展小型化、模塊化、隨體式波浪能供電裝置的設計研發,為海洋資料浮標儀器設備提供長期、穩定的能源供給,是實現海洋資料浮標海洋能供電的發展方向。
將波浪能能量轉換機構與海洋資料浮標標體結合,將標體作為海洋可再生能源能量轉換的紐帶或載體,其中較為典型的能量轉換類型是點吸收式波能發電裝置,即可通過標體作為波浪能吸收系統,并且基于阻尼板式潛浮體結構配合的錨固泊穩系統,以機械、液壓或者直驅的形式作為能量輸出系統,進行波浪能到電能的轉換,電力轉換系統可在浮標結構內部,轉換的電能經過處理直接用于浮標觀測系統的電源補給(圖3)。
同樣,可搭載于海洋資料浮標標體內部的搖擺式(又叫轉子式)波浪能發電裝置,利用海洋資料浮標標體在波浪中產生的搖擺和旋轉運動,驅動海洋資料浮標標體內安裝的偏心錘或陀螺儀旋轉,通過產生相對運動來驅動發電機進行電能的轉換(圖4)。
綜上所述,要想設計滿足海洋資料浮標供電需求的波浪能轉換裝置,則需通過數值模擬的手段計算海洋資料浮標隨波運動時標體所受的波浪力及其橫搖搖擺角度,進而進行詳細設計優化。
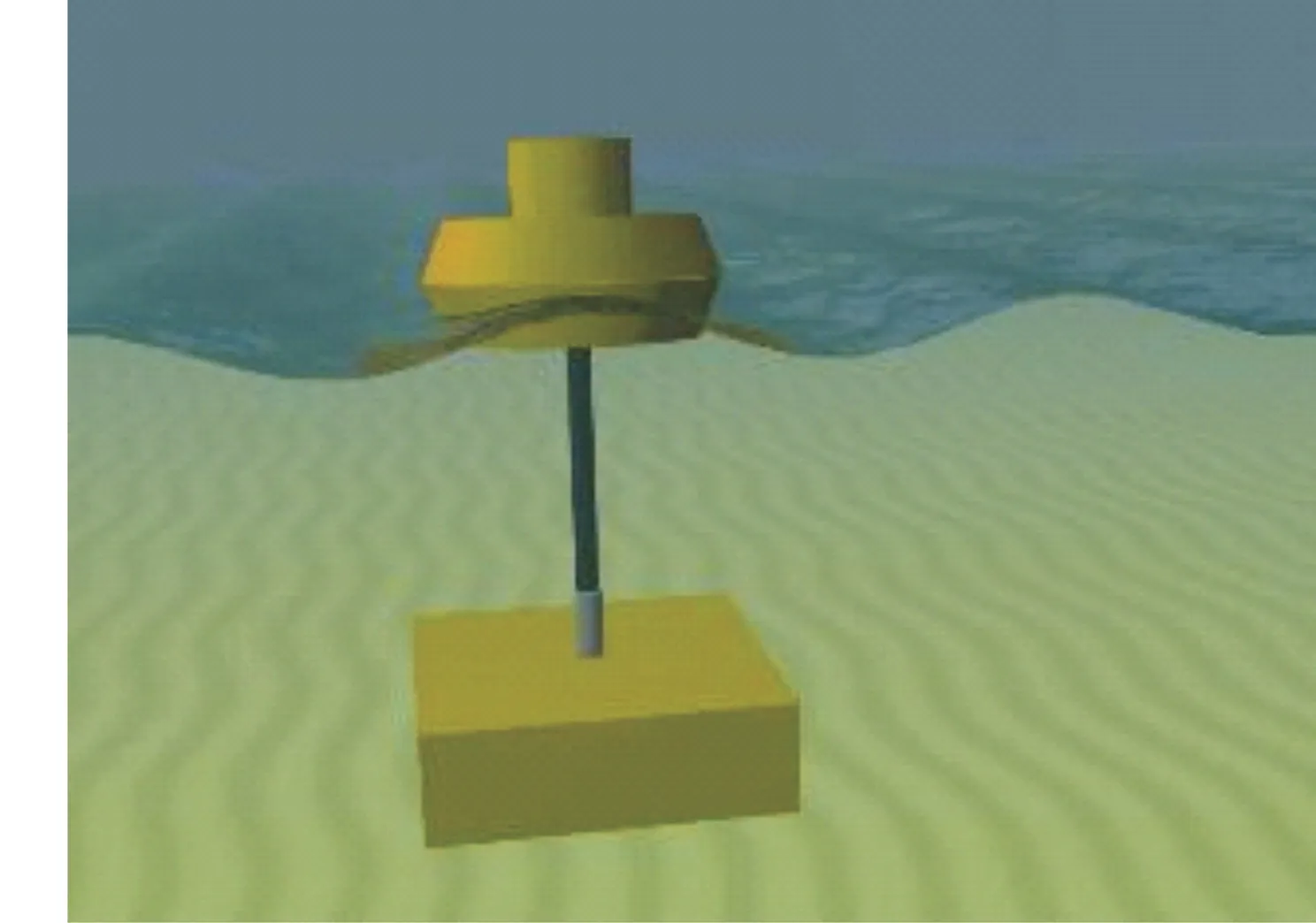
圖3 點吸收式波浪能發電裝置Fig.3 Point-absorber wave energy convertor
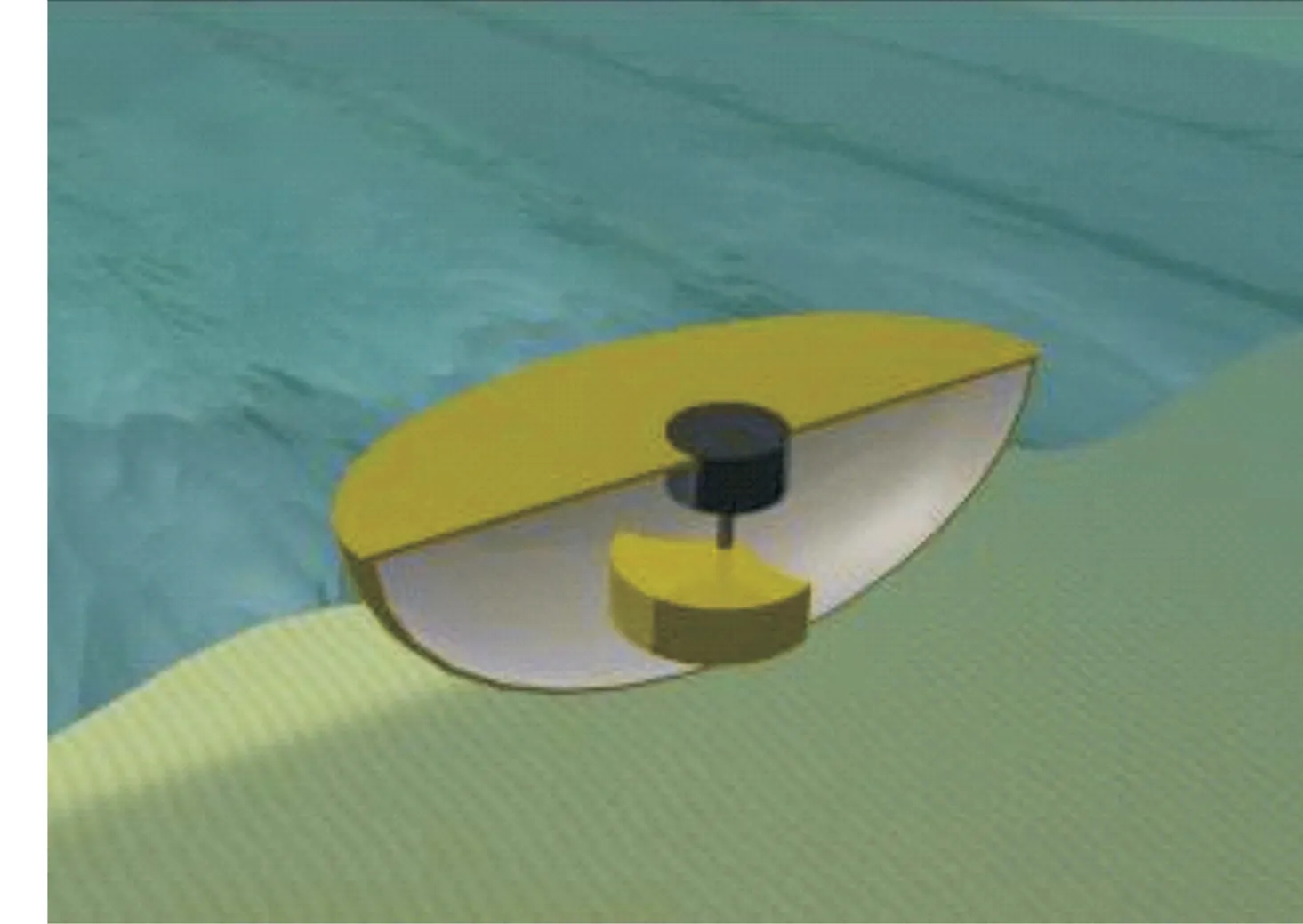
圖4 搖擺式波浪能發電裝置Fig.4 Rotating wave energy convertor
2 數值計算模型
2.1 控制方程
假設流體是均勻、無旋、不可壓縮的理想流體,自由表面微幅波動。在笛卡爾坐標系中,當長峰波角頻率為ω時,勢函數、速度和自由面平移量之間的關系可以如下表示:
(1)
式中,u(x,y,z)=φ(x,y,z),q是速度,ω為長峰波頻率,ζ為自由表面起伏,Φ(x,y,z,t)為不定常速度勢。
自由靜水面上浮體做垂蕩運動時,在線性假定下流場中一階不定常速度勢Φ(x,y,z,t)的定解問題為:
滿足拉普拉斯方程:
2Φ(x,y,z,t)=0。
(2)
自由面條件:

(3)
物面條件:
(4)

海底條件:

(5)
輻射條件:遠離物體的自由面上有波外傳。
以上公式中,拉普拉斯方程和邊界條件均為線性,應用迭加原理將速度勢函數分解,將不定常的速度勢分解可得到:
Φ(x,y,z,t)=ΦI(x,y,z,t)+ΦD(x,y,z,t)+ΦR(x,y,z,t),
(6)
式中,ΦI(x,y,z,t)為入射波速度勢,ΦD(x,y,z,t)為繞射勢,ΦR(x,y,z,t)輻射勢。其中ΦD+ΦR=ΦP,合稱為擾動勢。
設浮體在平衡位置附近做微幅的簡諧搖蕩運動,其搖蕩的速度勢Φ(x,y,z,t)為:
Φ(x,y,z,t)=Re{φ(x,y,z)e-iωt},
(7)
式中,φ(x,y,z)不含時間變量,因此僅與空間位置有關,被稱作空間速度勢。其求解為定常問題。
φ(x,y,z)=φI(x,y,z)+φD(x,y,z)+φR(x,y,z),
(8)
其中,φI為單一頻率、單一方向的平面入射波速度勢,可由下式求出:

(9)
式中,A為波浪振幅,k為波數,h為水深,g為重力加速度,λ為波長浪向角,β是波浪傳播方向與x軸正方向的夾角,其中波數2π/L,可以根據自由表面及水底的邊界條件來確定。
在動坐標系中,浮體時域運動方程為:

(10)
式中,M,m分別為浮體的廣義質量陣、附加質量陣;K(t-τ)為系統的延遲函數陣;C為浮體的靜水恢復力系數陣;Fw(t),Fwind,Fc,Fsn(t),Fm(t)分別為一階波浪力、風力、流力、二階波浪力、錨鏈張力。
一階波浪力Fw(t)可根據Cummins提出的時域與頻域波浪力的卷積關系求得:
(11)

二階波浪力的模擬采用紐曼近似方法計算。根據間接時域法,經過傅里葉逆變換,得延遲函數為:

(12)
式中,λij是頻域中浮體的阻尼矩陣。
時域中的浮體附加質量為:
(13)
式中,u是頻域中浮體的附加質量矩陣,ω0為任意值[6]。
本文通過三維有限元數值模擬軟件對浮標數值模型進行水動力學數值模擬,控制方程基于2.1所描述。其中,一部分計算模塊主要運用流體(一般是水)的輻射理論以及衍射理論進行流固耦合計算求解,中間也包含了淺水效應計算模塊,程序可以計算浮體結構的一階或是二階波浪力(考慮波浪力二階項的3D繞射散射分析程序2nd order 3D)以及浮體結構的響應,即頻域計算模塊。
另一部分計算模塊則是用于計算在特定波況下,水工結構物各水動力學參數的時程曲線,其在計算時調用源數據文件中的結構物的附加質量,輻射阻尼及衍射力,再考慮浮體結構間停泊線和鉸接的影響,計算浮體的運動響應。此模塊重新計算每個時間步長的水動力載荷的F-K力部分,計算時考慮浮體的濕表面積的變化及吃水的變化(如,甲板邊緣濕表面)引起的非線性動力學效應,即時域計算模塊。
本文所采用的數值模擬計算方法已經得到計算驗證,由于數值模型在計算過程中忽略了許多非線性項的影響,導致在波浪周期較小,頻率較大時產生較大誤差,但整體計算結果擬合度較好,證明了數值模型的準確性以及數值模擬方法的可行性[5]。
2.2 數值模型計算
在ANSYS-AQWA中建立10 m浮標的數值計算模型,如圖5所示,計算單點懸垂錨鏈系泊作用下浮標在不同波高周期作用下的運動響應情況,通過分析浮標的橫搖角度以及垂直方向的波浪力,可以定性地分析浮標體能否作為搖擺式及點吸收式波能發電裝置的能量吸收系統。數值模型計算所用波浪工況選擇也考慮了海洋資料浮標實海況投放海域的平均波高及周期進行選擇。表2為裝置正常工作海況計算表。
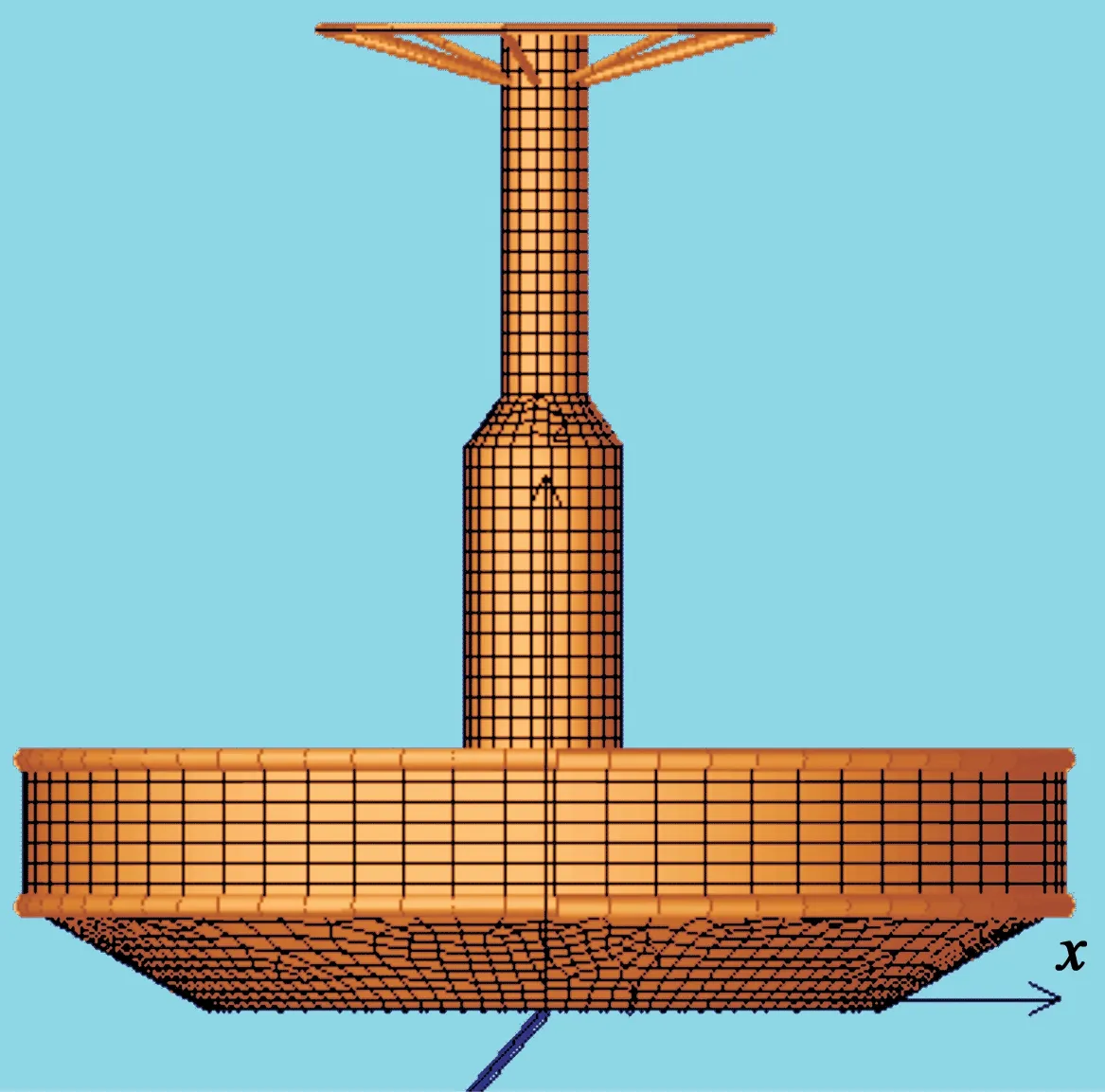
圖5 10 m直徑大型海洋資料浮標三維數值模型Fig.5 The 3D numerical simulation model of the 10 m diameter ocean data buoy
表2 裝置正常工作海況計算表
水動力模型建立完成后進行頻域以及時域的計算,上文提到浮標體作為波浪能量一級轉換的吸能結構,其所受的一階波浪力大小以及橫搖角度決定了浮標體吸收能量的多少,因此一階波浪力和橫搖角度是數值模擬的主要計算參數,一階波浪力又分為F-K力以及輻射力,在頻率較小的情況下輻射力較小,基本可以忽略,同時考慮點吸收式波浪能轉換機構多為轉換浮標體的單自由度運動能量,因此在本文所設計不同海況周期下時域計算就僅考慮Z方向上的F-K力進行分析討論。圖6為不同波高周期下橫搖及垂直方向的受力模擬數值結果。
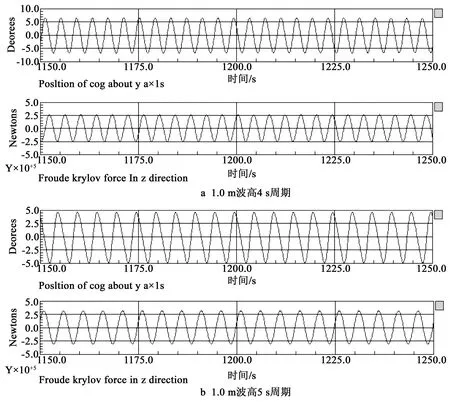

圖6 不同波高周期下橫搖及垂直方向受力曲線Fig.6 Force curve of the rolling and the Z direction F-K force in different wave height periods
由圖6可以看出,在小波高1.0~2.0 m短周期的海況下,浮標橫搖角可達到正負(5° ~10°)。以P3工況(2.0 m波高,4 s周期)進行計算分析:
設計浮標內偏心錘在半個波浪周期(2 s)內的擺動角度為10°,則偏心錘的平均轉速為1.2 r/min,滿足海洋資料浮標14 V充電電壓的永磁風力發電機需達到200 r/min,因此理論計算能量傳遞機構增速比:

設標體橫搖角度為α,偏心錘搖擺角度為β,偏心錘質量為m,擺臂長度為l,偏心錘轉動慣量為J,擺動摩擦系數為μ,機械系統傳動效率為η,發電機額定扭矩為Tm。
浮標在隨波運動過程中,標體內部偏心錘隨之擺動,偏心錘搖擺角度與標體的橫搖角度為時間的函數β(t)和α(t),擺動過程中力矩之和為偏心錘擺動力矩與偏心錘阻尼之差,偏心錘阻尼與發電機阻尼成正比[7],因此可得

因此,半個波浪周期偏心錘的搖擺做功的輸出功率:
將所有參數帶入,按照波浪能供電裝置10%的能量轉換效率,82.5%的機械傳動效率以及70%的發電機輸出效率,可得在P3工況(2.0 m波高,4 s周期)下,以偏心錘半個波浪周期10°的搖擺角度,可使發電機的輸出功率達到213 W,輸出電壓達到14 V并滿足海洋資料浮標的充電電壓。
Z方向的F-K力最大可到500 kN,通過前序的研究結果[8]可知,使用機械齒輪齒條式的能量轉換機構,在適當增速比的條件下可以滿足海洋資料浮標14 V的充電電壓,計算過程不再贅述。
綜上所述,10 m大型海洋資料浮標具備搖擺式波浪能轉換機構以及點吸收式波浪能轉換機構能量吸收系統的條件。
3 海洋資料浮標波浪能供電系統集成
波浪能供電機構的集成分為結構集成與系統集成兩部分。
浮標體直徑10 m,采用整體全焊接鋼結構,6個體積同為13.8 m3的浮力艙均勻分布在儀器艙與電池艙周圍。浮力艙的水密隔壁、甲板和底部骨架呈放射性布置,儀器艙與電池艙內外圍的水密隔壁呈圓筒狀,全部板材和骨架形成一個封閉的連續性結構。浮標體底部安裝有系鏈眼板,可通過單點系泊方式在海上定位。
如圖7所示,浮標體儀器艙空間較大,可確保波浪能能量轉換機構在浮標體內部的安全運行,在保證了結構安全性和可靠性的基礎上,波浪能能量轉換機構的安裝設計同時要兼顧靈活和可操作性,以滿足海上現場施工作業要求,以降低成本,便于后續的產業化推廣應用。

圖7 浮標體內部結構圖Fig.7 The structure inside the ocean data buoy
波浪能供電機構不僅在結構上要與浮標標體相匹配,其相應的電力系統也應與海洋資料浮標主控系統進行集成。在不影響資料浮標海洋環境觀測的前提下,通過浮標數據采集處理系統和通信系統,實現波浪能能量轉換機構電力參數的采集、儲存、處理和傳輸。基于實測的海洋資料浮標站位海域環境條件和供電裝置電力輸出參數,可實時獲取裝置的能量轉換效率、功率特性、電能質量特性等電力輸出特性,實現對波浪能供電裝置的遠程測試評估和狀態監控。
如圖8所示,集成波浪能能量轉換機構的海洋資料浮標可同時通過波浪能與太陽能進行聯合供電,同時海洋資料浮標數據采集系統在進行常規水文氣象數據采集的同時,可對波浪能供電裝置的工作狀態進行監測,并通過無線網絡或北斗通信系統將所有參數實時發送至岸基接收終端,實現數據的記錄、顯示等功能。

圖8 系統集成方案Fig.8 System integration project
4 結語
利用海洋可再生能源為海洋資料觀測系統供電是切實可行的,但由于其所在領域的復雜性及前瞻性,我們需要解決的關鍵技術也較多,包括捕能機構的水動力學性能,能量的存儲及傳遞,水下電能變換控制與傳輸技術,水下多源電能融合技術,水下非接觸式電能傳輸技術,水下供電故障診斷與隔離技術以及在位裝置的安全性能等等[9]。因此,海洋可再生能源在海洋資料觀測系統的能源供給應用是我國興海戰略的重要一步,也是較難的一步。
[1]王波, 李民, 劉世萱,等.海洋資料浮標觀測技術應用現狀及發展趨勢[J]. 儀器儀表學報, 2014, 35(1): 2401-2414.
[2]熊焰, 王海峰,等. 我國海洋可再生能源開發利用發展思路研究[J]. 海洋技術, 2009, 3(1): 106-110.
[3]劉野. 梯度水溫定點浮標觀測系統研究[D]. 青島:青島理工大學, 2014.
[4]王軍成. 海洋資料浮標原理與工程[M].北京: 海洋出版社,2013.
[5]黃燕. 碟形越浪式波能發電裝置的水動力性能研究[D]. 青島:中國海洋大學,2010.
[6]SAS IP,Inc. AQWA Theory Manual[EB/OL]. [2017-04-30].www.docin.com/p-1676943755.html.
[7]宋洪俠, 鄧啟平,姜恒甲,等. 一種新型擺式波浪發電裝置的研制[J]. 可再生能源, 2014.32(8):1239-1244.
[8]趙環宇,孫金偉,范秀濤,等. 海洋資料浮標波能供電裝置數值模擬研究[J]. 山東科學, 2016,29(6):9-18.
[9]楊燦軍,陳燕虎. 海洋能源獲取、傳輸與管理綜述[J]. 海洋技術學報, 2015,3(34):111-115.
Numericalsimulationoflargeoceandatabuoywaveenergyconvertor
LIUYe1,DINGYuan-qiang1,ZHAOHuan-yu1,CHAIHui1,ZHAOQiang1,XUYu-zhe1,JIANGFeng2
(1.ShandongProvincialKeyLaboratoryofOceanEnvironmentMonitoringTechnology,InstituteofOceanographicInstrumentation,ShandongAcademyofSciences,Qingdao266001,China;2.SouthChinaSeaBranch,StateOceanicAdministration,Guangzhou510310,China)
∶Taking the large ocean data buoy with 10 m diameter as research objects, the wave energy convertor adapted to its structural characteristics was analyzed, and the 10 m diameter buoy body’s Froude-Krylov and the rolling angle were calculated by means of numerical simulation. At the same time, the output power of the wave energy convertor was calculated, which could meet the charging voltage of the accumulator. Finally, this paper proposed a structural design scheme and a system integration project suitable for this kind of ocean data buoy, which provided an idea for the further research and development of the ocean data buoy wave energy convertor.
∶ocean data buoy; wave energy convertor; numerical simulation; system integration
10.3976/j.issn.1002-4026.2017.06.002
2017-07-13
國家重點研發計劃(2017YFC1403302);國家自然科學基金(61405106);山東省科學院青年基金(2014QN029;2015QN026;2015QN018);山東省重點研發計劃(2016GGH4501);山東省自然基金(ZR2013DM013)
劉野(1985—),男,工程碩士,助理工程師,研究方向為控制工程。E-mail:18669708850@163.com
P741
A
1002-4026(2017)06-0006-09
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
