直流差動式位移傳感器自動校準系統的設計
2018-01-03 12:34:50楊勇王亞東吳文峰
山東工業技術 2018年24期
楊勇 王亞東 吳文峰
摘 要:針對差動式位移傳感器,設計了一套高效率、高精度、大行程的專用線位移傳感器自動校準系統。詳細設計了校準系統的組成結構、測控軟件,具體分析了校準系統和校準方法的測量不確定度。整個校準過程由計算機控制,采用伺服電機驅動精密直線運動機構,選取光柵尺作為差動式位移傳感器的標準位移輸入,通過分析差動式位移傳感器的輸入輸出關系實現對其的自動校準。試驗分析表明,該系統可以對精度等級0.01以上的直流差動式位移傳感器進行自動校準。
關鍵詞:絕對式光柵尺;直流差動式位移傳感器;自動校準;動態特性;測量不確定度
DOI:10.16640/j.cnki.37-1222/t.2018.24.108
0 引言
直流差動變壓器式位移傳感器(LVDT)是線位移傳感器中最常見的一種,可用于測量位移、距離和應變量等長度尺寸,在機械制造業和工業自動檢測領域中占有重要地位,為保證傳感器使用的可靠性和測量精度,根據國標規定需要對靈敏度、基本誤差、線性度、回程誤差和重復性等主要計量特性做定期校準[1]。目前國內二、三級計量室主要是利用常規測長設備進行線位移傳感器的校準,國防科技工業計量測試中心是利用激光干涉比長儀進行線位移傳感器的手動校準,而西安所是使用萬能測長儀進行線位移傳感器手動校準,成都所研制了一臺行程為1000mm、準確度為0.01mm的大行程位移傳感器自動校準裝置,NPL研制了一套行程為50mm、準確度為0.05μm高精度位移傳感器自動校準裝置[2]。
隨著自動化水平的不斷提高,傳感器的需求越來越多,質量要求也越來越高。然而常規的位移傳感器手動校準裝置,工作量大,測量繁瑣且效率低,校準精度也不易保證,現有的位移傳感器自動校準裝置又不能同時滿足大行程和高精度兩方面的要求。而且,現有的校準裝置只進行了位移傳感器靜態特性的測試校準,而缺乏對動態特性的測試校準。因此,為了提高測試效率、測試精度、測試范圍,本文設計了一套高效率、高精度、大行程的專用線位移傳感器自動校準系統。該系統以多種型號的直流差動變壓器式位移傳感器為測試對象,對傳感器的靜態特性和動態特性都進行了測試校準,實現了校準過程的自動化、快速化與高精度。
1 系統結構原理
位移傳感器功能是將直線機械位移量轉換成電信號。對于直流差動變壓器位移傳感器,是基于變壓器工作原理,采用直流電源供電。其原邊有一個繞組,副邊的兩個繞組按差動方式連接,變壓器開口上有一活動鐵芯,該鐵芯產生位移時使磁路改變,從而使輸出差動電壓隨之改變[3]。
1.1 系統組成結構
位移傳感器自動校準系統主要由激勵電源、測控軟件、測量裝置、伺服驅動裝置及標準器裝置五部分組成。如圖1所示。
(1)激勵電源:多功能交直流穩壓源,為位移傳感器提供穩定的工作電源。
(2)測控軟件:裝有win7系統的計算機,主要功能是完成對位移傳感器標準器裝置的的控制,以及對其輸出信號量存儲和運算,以及最終按要求呈現測試結果。
(3)測量裝置:數字示波器和數字萬用表,主要功能是用帶USB接口的測量裝置,可將讀取的傳感器輸出量傳輸到電腦。
(4)伺服驅動裝置:運動控制卡、伺服驅動器及伺服電機等,主要功能是平穩快速驅動伺服電機拉伸位移傳感器完成標準要求位移。
(5)標準器裝置:位移傳感器、光刪尺、底座、導軌、夾具等,主要功能包括試品的安裝固定、位移傳感器完成標準要求位移后,能對外輸出要求的信號量。
1.2 系統工作原理
系統工作原理:由電腦控制整個測量系統,由步進電機發送驅動脈沖、光柵尺產生標準位移、位移傳感器信號采集以及數據分析處理,結果的顯示和報告的生成等[4]。如圖2所示。
登錄PC機上的測控軟件系統,輸入相應的校準信息和參數,選擇測試校準的項目,系統根據選擇的測試項目和輸入的校準信息,生成或選擇相應的伺服驅動控制邏輯、數據采集控制邏輯。PC機根據相應的測控邏輯發送命令給PCI運動控制卡,驅動伺服電機通過傳動絲桿帶動位移傳感器的拉桿作平行于導軌的直線運動[5]。位于導軌上的絕對式光柵尺將位移信號反饋給數據采集單元,獲得計量所需的標準位移量,并實現對設置位移量的閉環控制[6]。同時,數字萬用表和數字示波器讀取線位移傳感器的輸出信號并通過USB總線反饋給數據采集單元,獲得傳感器的實際測量值。然后,通過PC機上的測控軟件,以絕對式光刪尺的位移測量值作為基準,將采集到的數據按測試項目原理進行計算,實現對線位移傳感器的自動校準。
1.3 測試項目原理
該位移傳感器自動校準系統主要用于在常溫條件下,測算直流差動變壓器式位移傳感器技術指標用。適用的測試項目范圍包括多項靜態指標和動態指標。
靜態特性指標包括:機械行程、輸出阻抗、基本誤差、非線性誤差、回程誤差、重復性誤差、零點漂移等。
1.4 測控軟件系統
校準系統的測試控制軟件,基于Visual Studio 2012平臺和C++語言開發。由登陸界面、試驗設置界面、測量界面、數據調用界面等組成。能夠以word形式自動生成原始記錄并導出/打印,可對原始記錄格式及內容進行編輯。具有SQL Server數據庫通訊功能,能夠與外部軟件實現數據交互。
(1)登陸界面:包含輸入框信息:“請輸入操作密碼并按此登
入,非專業人員禁止操作”。
(2)試驗設置界面:包含試品類型選擇、試驗項目選擇、試驗參數設置等;需保存前一次試驗操作的參數設置,在啟動時系統需進行自檢,并提示操作人員目前參數設置狀態,避免系統斷電后反復的參數設置;可對已配置參數信息進行存儲和調用。
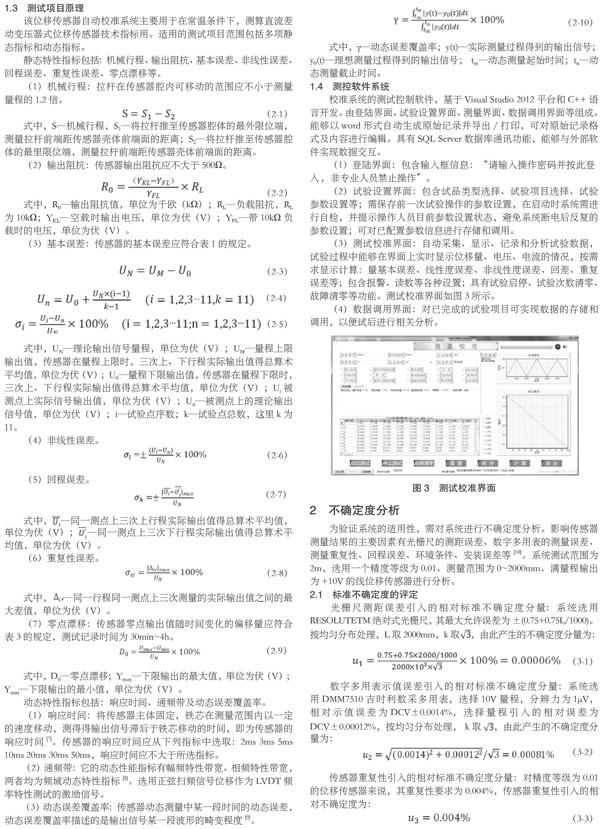
(3)測試校準界面:自動采集、顯示、記錄和分析試驗數據,試驗過程中能夠在界面上實時顯示位移量、電壓、電流的情況,按需求顯示計算:量基本誤差、線性度誤差、非線性度誤差、回差、重復誤差等;包含報警、讀數等各種設置;具有試驗啟停、試驗次數清零、故障清零等功能。測試校準界面如圖3所示。
(4)數據調用界面:對已完成的試驗項目可實現數據的存儲和調用,以便試后進行相關分析。
2 不確定度分析
為驗證系統的適用性,需對系統進行不確定度分析。影響傳感器測量結果的主要因素有光柵尺的測距誤差、數字多用表的測量誤差、測量重復性、回程誤差、環境條件、安裝誤差等[10]。系統測試范圍為2m,選用一個精度等級為0.01、測量范圍為0~2000mm、滿量程輸出為+10V的線位移傳感器進行分析。
2.1 標準不確定度的評定
2.2 測量不確定度評估
使用該套校準系統,對0~2000mm測量范圍內,不同技術指標的直流差動式位移傳感器的測量不確定度如表1[11]。
分析可知,使用這套直流差動式位移傳感器自動校準系統進行測試校準工作所獲得的試驗結果可靠,符合《JJF 1305-2011校準規范》的基本要求。
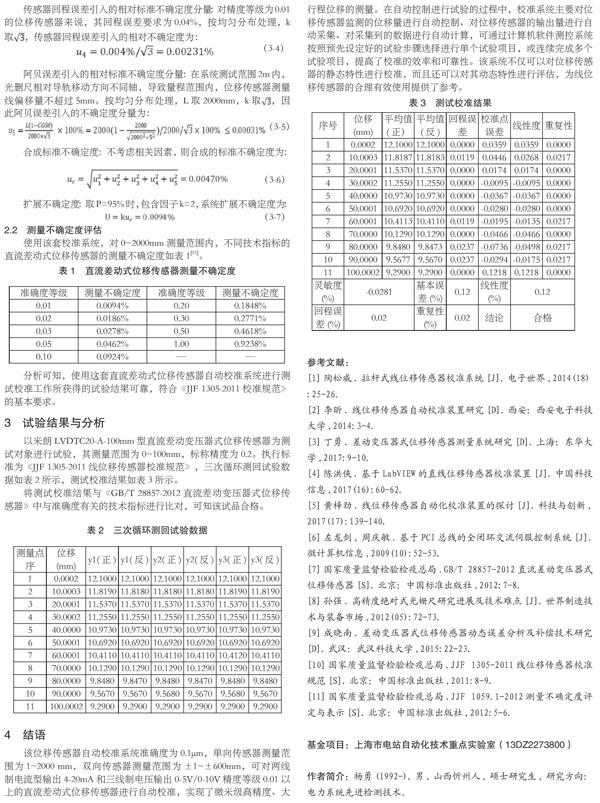
3 試驗結果與分析
以米朗LVDTC20-A-100mm型直流差動變壓器式位移傳感器為測試對象進行試驗,其測量范圍為0~100mm,標稱精度為0.2。執行標準為《JJF 1305-2011線位移傳感器校準規范》,三次循環測回試驗數據如表2所示,測試校準結果如表3所示。
將測試校準結果與《GB/T 28857-2012直流差動變壓器式位移傳感器》中與準確度有關的技術指標進行比對,可知該試品合格。
4 結語
該位移傳感器自動校準系統準確度為0.1μm,單向傳感器測量范圍為1~2000 mm,雙向傳感器測量范圍為±1~±600mm,可對兩線制電流型輸出4-20mA和三線制電壓輸出0-5V/0-10V精度等級0.01以上的直流差動式位移傳感器進行自動校準,實現了微米級高精度、大行程位移的測量。在自動控制進行試驗的過程中,校準系統主要對位移傳感器監測的位移量進行自動控制、對位移傳感器的輸出量進行自動采集、對采集到的數據進行自動計算,可通過計算機軟件測控系統按照預先設定好的試驗步驟選擇進行單個試驗項目,或連續完成多個試驗項目,提高了校準的效率和可靠性。該系統不僅可以對位移傳感器的靜態特性進行校準,而且還可以對其動態特性進行評估,為線位移傳感器的合理有效使用提供了參考。
參考文獻:
[1]陶松威.拉桿式線位移傳感器校準系統[J].電子世界,2014(18):25-26.
[2]李昕.線位移傳感器自動校準裝置研究[D].西安:西安電子科技大學,2014:3-4.
[3]丁勇.差動變壓器式位移傳感器測量系統研究[D].上海:東華大學,2017:9-10.
[4]陳洪俠.基于LabVIEW的直線位移傳感器校準裝置[J].中國科技信息,2017(16):60-62.
[5]黃梓勁.線位移傳感器自動化校準裝置的探討[J].科技與創新, 2017(17):139-140.
[6]左龍劍,周慶敏.基于PCI總線的全閉環交流伺服控制系統[J]. 微計算機信息,2009(10):52-53.
[7]國家質量監督檢驗檢疫總局.GB/T 28857-2012直流差動變壓器式位移傳感器[S].北京:中國標準出版社,2012:7-8.
[8]孫強.高精度絕對式光柵尺研究進展及技術難點[J].世界制造技術與裝備市場,2012(05):72-73.
[9]成曉南.差動變壓器式位移傳感器動態誤差分析及補償技術研究[D].武漢:武漢科技大學,2015:22-23.
[10]國家質量監督檢驗檢疫總局.JJF 1305-2011線位移傳感器校準規范[S].北京:中國標準出版社,2011:8-9.
[11]國家質量監督檢驗檢疫總局.JJF 1059.1-2012測量不確定度評定與表示[S].北京:中國標準出版社,2012:5-6.
基金項目:上海市電站自動化技術重點實驗室(13DZ2273800)
作者簡介:楊勇(1992-),男,山西忻州人,碩士研究生,研究方向:電力系統先進檢測技術。