智能變電站遙控故障的觀察與處理分析
2018-01-04 05:09:32
四川電力技術 2017年6期
(國網成都供電公司,四川 成都 610041)
智能變電站遙控故障的觀察與處理分析
李游
(國網成都供電公司,四川 成都 610041)
為提高智能變電站的自動化維護質量和效率,根據現場的主流自動化廠商設備進行遙控故障全過程的研究分析,提出智能站遙控故障的可信觀察窗定位方法。在分段驗證階段進行了不同階段的相似與差異性總結,提出了1套基于104規約的智能變電站遙控故障分析的解決方案和分析流程。最后通過流程圖明確遙控故障觀察點與處理分析過程,旨在讓二次維護人員在面對頻繁更新的規范技術要求和大量的智能站自動化維護工作的同時對智能站遙控各環節有更深入理解。
智能變電站;遙控;故障分析;觀察窗定位;分段驗證;104規約
0 引 言
在大規模普及智能變電站綜合自動化過程中, 目前雖然已針對數據通信網關機、同步相量測量裝置、電力系統時間同步及監測、網絡報文記錄及分析裝置、測控裝置等設備的技術規范標準已都發布大量對應企標。但在實際應用過程中,不同廠家自動化設備在外觀接口、裝置界面和裝置參數配置方面仍存在不少細節上差異。特別是測控裝置的智能終端的控制字、定值的設定在自動化工作中會產生新的困惑。遙控功能是監控系統的重要組成部分,變電站里的斷路器、隔離開關以及保護壓板都是遙控對象。當變電站的遙測和遙信數據異常時,對主設備影響不是很大,但是遙控操作異常時將直接影響到電網的安全穩定運行,輕則造成遙控拒動,延誤停送電,重則造成遙控誤分合閘事故[1]。
通過分析發現不同自動化廠商的裝置之間差異性配置是影響智能站遙控功能的重要因素。因此現將所使用的自動化設備通過表1列舉以供參考。
此外,考慮目前智能站和主站通訊主要采用IEC 60870-5-104規約,因此所表述的智能站遙控

表1 涉及的自動化設備
過程均基于104規約。
1 遙控類型及操作過程
1.1 遙控類型
遙控類型主要有增強型控制和普通控制兩大類,其中增強型控制需要對控制的結果進行校驗,以判斷執行過程是否成功;普通控制不需要校驗執行結果,控制過程隨著執行的結束而結束。增強型控制又分為帶預置和不帶預置兩種類型,即增強型選擇控制、增強型直接控制。普通控制也分為帶預置和不帶預置兩種類型,即選擇型控制、直接控制[2]。
4種控制方式中以增強型選擇控制用得最多,主要用于對執行過程要求較高的場合,例如斷路器及隔離開關遙控、保護軟壓板、變壓器擋位升降遙控等;另外在一些要求快速執行,不要進行任何校驗的場合會選用直接控制,直接對控制對象進行控制,一步執行完畢即控制結束,例如保護裝置及智能終端的遠程復歸遙控、急停遙控等[3-4]。
1.2 遙控操作過程
通常而言,增強型選擇遙控的操作一般分為3步:
1)遙控選擇:主站端發出對象和性質的命令。
2)遙控返校:廠站端返送安全信息校核。
3)遙控執行:發送執行命令。
具體為:遠動主站向變電站數據通信網關機發出遙控對象(開關、隔離開關、軟壓板或擋位)和性質(分、合或升、降)預置命令;變電站數據通信網關機收到后,經測控裝置、智能終端處理向遠動主站發出校核正確信息;遠動主站收到正確校核信號,再與下發命令相比較,在校核無誤的情況下顯示“預置成功”進入下一步遙控執行程序。此時監控人員通過遙控執行命令向變電站數據通信網關機發送執行遠程操作命令。遙控執行后,變電站數據通信網關機收到測控裝置內設置變位信息后上傳遠動主站,主站在規定時間內收到該遙控對象的變位信號,則顯示遙控成功,否則顯示失敗[5]。
智能站完整的遙控命令執行流程如圖1所示。
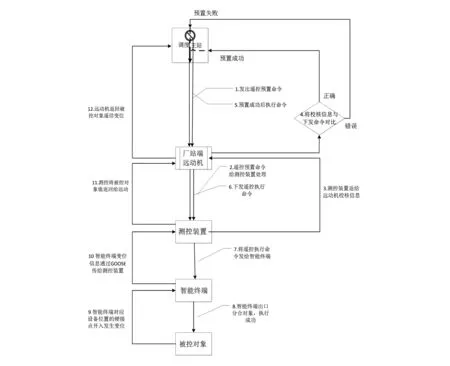
圖1 智能站遙控命令執行完整流程
2 遙控故障排查與處理
2.1 觀察窗定位
根據長期智能站自動化現場調試經驗,發現用觀察窗定位的分段驗證原理排查遙控故障問題是非常有效的方法。僅針對遙控而言,利用后臺監控機(主站)、測控裝置和智能終端作為觀察窗定位,其分別位于遙控全過程的源端、中樞和輸出部分。因為所選觀察窗對判斷故障直接方便,因此可以快速定位故障區域并進行下一步的分段驗證而最終確定故障點。
1)后臺監控機(主站):觀察遙控命令發出情況和遙控返校信息。
后臺或主站未能發出遙控命令,則檢查前置機或后臺組態配置。若未能收到返校命令,主要檢查數據通信網關機參數配置;若收到錯誤返校,主要考慮主站或后臺參數配置錯誤,比如RTU地址錯誤、轉發表錯誤等。
2)測控裝置:觀察遙控報告記錄的遙控對象號及性質。
后臺或主站是否對正確對象發出遙控命令及測控裝置發出遙控命令的性質是否正確。測控裝置是遙控的中樞,因此在返校正確但測控未出口的情況下應先排除測控問題。
3)智能終端:觀察GOOSE異常信號和遙控信號燈。
當測控遙控GOOSE命令已正確下發,而智能終端未收到跳、合閘命令應排查鏈路是否異常、過程層交換機VLAN 劃分正確性及SCD虛端子連線等問題。當智能終端收到GOOSE跳閘命令并且也點亮跳合閘燈但最終未正確動作,應排查智能終端出口參數和二次回路問題。
2.2 遙控故障的分段驗證
根據上述觀察窗定位,可將智能站遙控故障劃分為5個區域。故障區域有軟、硬方面配置問題,具體如表2所示。
實際工作中發現遙控故障包含了軟、硬配置方面問題,而軟配置故障是最難以發現和判斷的。通常遙控故障歸為無法遙控、遙控預置失敗、遙控執行失敗3類[6]。接下來根據上述3類故障重點分析故障分段驗證問題。
2.2.1 無法遙控
禁止遙控:在廠站端,南瑞科技公司和南瑞繼保公司的后臺數據庫均可取消“遙控允許”屬性,并且表1所列3家公司的后臺均可設置監控畫面禁止遙控。但是應注意不同廠商對畫面遙控權限定義不同,有的廠商規定只能在分畫面遙控等情況。
無遙控權限:所有廠商均可設置無操作權限的操作員無遙控權限,或對檢修的一次設備掛牌后造成無遙控權限。
2.2.2 遙控預置失敗
1)“遙控預置”指令超時
①調度主站至數據通信網關機
故障點主要包括3方面:遠動通道故障、主站端設備故障和數據通信網關機故障。先排查遠動通道故障:當通道誤碼率高、通道接觸不好或者通道存在干擾源,都會使主站或后臺的遙控命令不能正確下發到裝置。通常是檢查前置通道表或前置機報文查看通道誤碼率。具體操作是斷開廠站端RTU上傳數據,檢查是否有干擾信號滲入或通道中斷[7]。在主站端下發一組SNTP校時命令,廠站端通道輸出接口收到的數據應該與主站一致。如果不一致說明干擾信號嚴重,未收到數據則很可能通道已中斷,再從源端即主站設備排查異常,先檢查下行通道和機柜內網線是否松動或者接觸不良。確認接觸良好后將主站設備自環,在前置機上發SNTP網絡校時。如果未收到校時數據,說
明主站設備有故障。此時應在前置機上檢查參數配置,如廠站RTU地址設置兩側是否一致、TCP連接類型可能錯選為TCPServer、TCP連接端口未正確設置為2404而未啟動104進程[8]。
主站前置故障點集中在RTU地址錯誤(地址錯誤時可通過104規約得到一個傳送原因為6E00的否定響應報文)和遠動規約選擇錯誤上。數據通信網關機可能的故障點如表3所示。
②后臺監控機至測控裝置
后臺監控機和測控裝置之間可能造成遙控預置失敗的部分原因是測控裝置未處于遠方狀態或測控有聯鎖邏輯閉鎖。而絕大部分原因是后臺監控機組態設置錯誤。若在站端進行遙控,可以明確的故障點如表4所示。
關于第5條故障點的說明:南瑞科技公司測控NSD3560中參數整定-裝置參數-軟硬壓板切換設置對遠方就地開入有影響,也是容易忽略的。0表示使用測控裝置內的就地軟壓板,1表示使用外接就地硬開入壓板。當錯誤整定為0,但測控未投就地軟壓板控制字會導致預置失敗,后臺會顯示返回值2。
關于第10條故障點的說明:北京四方公司和南瑞繼保公司后臺如果將遙控類型設置為無效,那么后臺可以執行但是測控裝置不會收到遙控預置信息。
3 遙控執行失敗
3.1 同期參數整定錯誤

表3 主站遙控預置失敗關于數據通信網關機設置

表4 廠站遙控預置失敗關于后臺或測控裝置故障點
同期條件不滿足也是220 kV變電站遙控合閘的重要問題。主要故障點是測控裝置的定值整定不正確導致條件不滿足閉鎖同期合閘。通過現場調試和研讀說明書總結出同期參數不正確導致遙控失敗的故障點如表5所示。
關于第1條故障點的說明:同期電壓類型必須和同期額定電壓保持一致。不同廠家表示同期電壓類型的方式不同:南瑞繼保公司用0~5分別表示UA、UB、UC、UAB、UBC、UCA;北京四方公司要求先投入檢同期功能軟壓板后才能在同期控制字中選擇需要同期的電壓類型。南瑞科技公司測控裝置具有相角補償功能,當裝置輸入的電壓Ua和Usa不是同名電壓,存在固有相角時,可以進行相角補償。同期定值參數中具有定值“相角補償使能”和“相角補償時鐘數”。“角度補償鐘點數”是當開關合上后,開關兩側輸入電壓向量角度即是需要補償的角度。
關于第2條故障點的說明:南瑞繼保公司和北京四方公司采用的同期TV電壓是一次額定值,而南瑞科技公司定值判定采用二次值。因此應特別注意要根據下達的二次定值單和現場實際裝置定值要求進行轉換。
關于第3條故障點的說明:同期條件不合格包含諸多方面,如頻差、電壓差、相差、同期導前時間整定錯誤、母線TV斷線、交換機開啟多播限制等。其中關于交換機的多播限制,因SV和GOOSE傳輸均采用組播MAC傳輸,而當交換機開啟組播限制后,SV會出現丟幀、GOOSE出現時通時斷現象。當出現丟幀時也會造成同期條件不合格而閉鎖遙控。
關于第4條故障點的說明:南瑞繼保公司測控裝置未投入SV接收壓板時,后臺及測控裝置均能正確顯示采樣值,但UX并不納入同期值計算而造成同期壓差、角差值不滿足條件。這3家測控設備也僅有南瑞繼保公司裝置有SV接收壓板。
關于第5條故障點的說明:北京四方公司測控裝置在考慮3/2接線時同期電壓采用近區優先原則,因此可投入非固定同期方式壓板滿足要求。當抽取同期電壓只有1路時,應投入固定方式壓板。
3.2 智能終端未收到分合閘命令
3.2.1 測控裝置-智能終端之間
通過測控裝置與智能終端兩個觀察窗可以很容易地分析出故障區域,此時故障現象是智能終端未收到分合閘命令,因此除了物理鏈路中斷外只有測控裝置GOOSE未發出或智能終端接收GOOSE出現故障兩種可能。現列舉故障點如表6所示。
關于第5條故障點的說明:南瑞科技公司測控裝置收到自動合閘判斷命令后,將按照裝置同期定值參數中的“自動合閘方式”參數設置進行合閘操作。如果其為0,則為自動判斷方式,裝置根據斷路器兩側電壓情況自動進行合閘方式判斷;如果參數為1,則只進行無壓合閘操作,如果不滿足無壓條件則不進行合閘;如果參數為2,則只進行有壓合閘操作,不滿足條件不合閘;如果參數為3,則進行無條件合閘操作。因此當自動合閘方式整定和實際不一致,測控也無法出口。

表5 遙控執行失敗關于測控的同期參數整定原因

表6 廠站遙控預置失敗關于測控裝置與智能終端的故障點
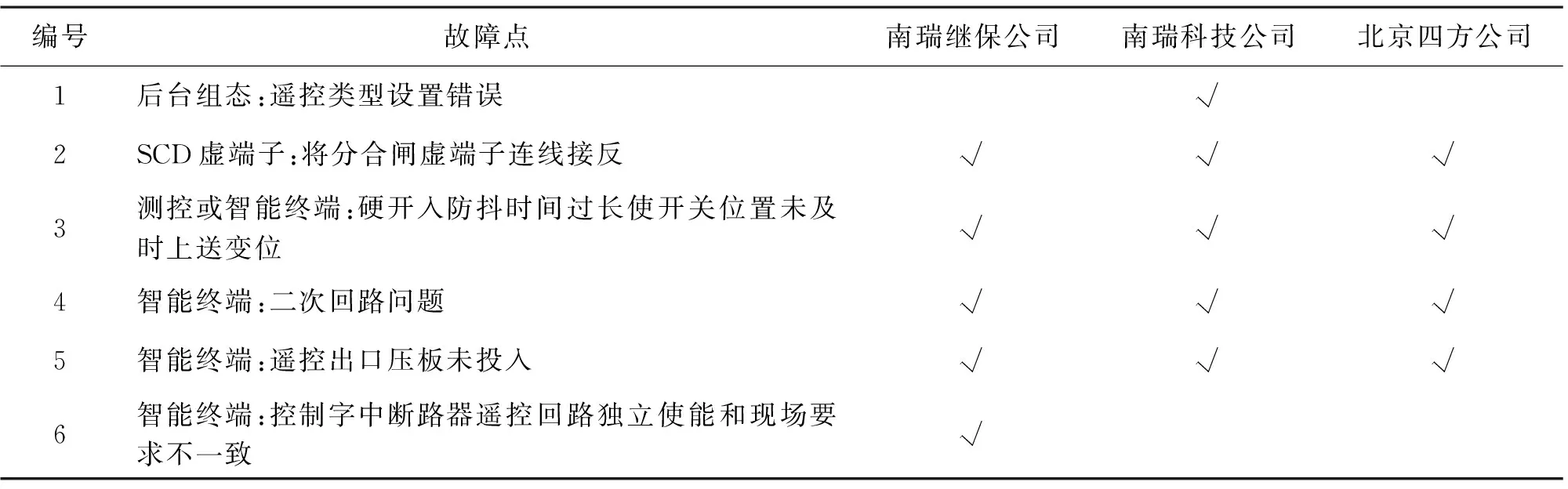
表7 智能終端收到跳合閘命令但未出口的故障點
關于第6條故障點的說明:使用操作斷路器插件開入設為1時,三相斷路器總位置開入應由硬接線合成;否則,應由智能終端的邏輯合成。
關于第7條故障點的說明:南瑞繼保公司對GOOSE出口軟壓板定義為出口使能軟壓板,北京四方公司定義為控制邏輯軟壓板,而南瑞科技公司測控裝置沒有設置GOOSE出口壓板。
最后第8條故障點的說明:北京四方公司測控裝置PLC程序寫入遙控包含遠方開入規則。因此,必須確保SCD中將智能終端的遠方就地切換把手開入關聯至測控GOOSE開入89,并且把手處于遠方狀態,遙控預置成功后才能出口。
3.2.2 數據通信網關機設置
目前發現南瑞科技公司在數據通信網關機進行配置時可能遇到如下故障導致遙控失敗,具體是在數據通信網關機的遠動程序frcfg中的通訊配置模塊下存在無任何配置的空節點。這個故障點很隱蔽,也難以查出。
3.3 智能終端收到命令但未出口
通過觀察窗發現智能終端能收到分合閘命令(觀察遙控分合閘燈) 時但并未出口或出口不正確時,主要故障點還是在智能終端。具體故障點如表7所示。
關于第1條故障點的說明:南瑞科技公司后臺組態中如果將1072開關、隔離開關表的“一直控分(一直控合)”使能,那么無論開關位置處于什么位置、無論進行的是分閘或合閘操作,最后都只會出口分閘(合閘)命令。
關于第3條故障點的說明:智能終端二次回路故障點眾多,最常見故障有斷路器控制回路斷線;智能終端遙信正、負電源配線虛接、移位;因斷路器遙控后抖動使智能終端背板產生松動;智能終端壓板背板線被誤短接;遙控分合閘出口線錯接等。對運行設備查二次回路主要使用萬用表測量電位,結合圖紙判斷正確電位法;對新建站主要采用短接正電至跳合閘出口回路,通過聽繼電器動作聲或實際出口情況判斷故障區域。
關于第5條故障點的說明:南瑞繼保公司智能終端中參數“斷路器遙控回路獨立使能”定值為0時,遙控、手動分合與保護跳閘、重合閘共用出口接點;定值為1時遙合、手合接點采用B12板的備用1遙合接點,并且需外加一個重動繼電器才能實現。如果設計單位未對遙控節點再配置重動繼電器,那么在線路新投時應注意此定值參數的設置。
4 結 語
通過遙控故障的觀察窗定位及異常處理具體分析,歸納出如圖2所示的遙控過程觀察窗及分段驗證的信息流。針對不同故障現象,可以根據觀察窗所得現象分析出故障區域,再進行分段驗證。現場可根據所總結的可能故障點進行逐一驗證。雖然目前不同廠商的自動化設備有很多具體的參數設置,相信隨著國家電網公司對自動化設備“四統一、四規范”要求的提出和實施,不同廠商遙控故障差異性設置問題會逐漸減少,真正利于智能站自動化維護。

圖2 結合觀察窗的遙控故障分析圖信息流
綜上所述,圍繞智能變電站遙控故障的角度詳細闡述了分析過程。針對3家主流廠商自動化設備進行了對比,總結出遙控故障過程的3個觀察窗和分段驗證思路。如今,智能變電站的大量新技術應用已使原有調試、運行和維護模式產生了重大變化,因此試圖用觀察窗定位、分段驗證及差異性總結對智能變電站自動化異常處理進行一次探索,形成良好智能站的自動化維護思路。
[1] 汪娟華,葉鐘海. 一起電網調度遙控操作失敗故障的分析與處理[J]. 江西電力, 2014,38(2): 61-62.
[2] 李雨舒,李明珍. 無人值班變電站遙控常見故障的分析與處理[J]. 電力系統保護與控制, 2009,37(18): 145-146.
[3] 王旭東,梁棟,曹寶夷,等. 三遙配電自動化終端的優化配置[J]. 電力系統及其自動化學報, 2016,28(2): 36-42.
[4] 張曦,黃飛,劉志宏,等. 配電自動化三遙功能閉環測試方法及其應用[J]. 2016,33(6):2-6.
[5] 周隨江. 集中監控遙控遙調異常的分析[J]. 低碳世界, 2016(13):26-27.
[6] 韓國政,徐丙垠,索南加樂,等. 基于IEC 61850的配網自動化通信技術研究[J]. 電力系統保護與控制, 2013,41(2): 62-66.
[7] 許偉國. 110 kV智能變電站自動化系統關鍵技術應用研究[J]. 供用電, 2011,28(5): 40-45.
[8] 張大偉. 104規約在成都電網調度自動化系統中的運用分析[J]. 四川電力技術, 2013,36(3): 49-51.
In order to improve the quality and efficiency of automatic maintenance of smart substation, the observation window positioning method for remote control fault is proposed based on the whole process of remote control fault analysis from mainstream automation equipment manufacturer. Moreover, the similarities and differences of each stage are summarized, and a set of solution and analysis process is put forward for remote control fault analysis of smart substation based on IEC 60870-5-104. Finally, the observation points and processing analysis process for remote control fault are clearly defined through the flow chart. The above-mentioned can help the maintainers of secondary system to have a better understanding in every segment of remote control when facing the frequently updated specifications and technical requirements and a large number of automation maintenance works of smart station.
smart substation; remote control; fault analysis; observation window positioning; domain-verifiable; Telecontrol Equipment and Systems-Part 5-104
TM76
B
1003-6954(2017)06-0068-08
李 游(1986),碩士研究生、工程師,研究方向為智能變電站二次系統及自動化。
2017-09-12)
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50