格魯吉亞奇爾克伊水電站地震監(jiān)測(cè)系統(tǒng)的應(yīng)用
2018-01-04 18:22:52G.N.
水利水電快報(bào) 2017年12期
[] G.N.
格魯吉亞奇爾克伊水電站地震監(jiān)測(cè)系統(tǒng)的應(yīng)用
[俄羅斯] G.N.安東諾夫等
為更好地掌握格魯吉亞奇爾克伊水電站周邊地區(qū)及壩址區(qū)域的地震風(fēng)險(xiǎn),分別對(duì)電站地震安全監(jiān)測(cè)網(wǎng)絡(luò)系統(tǒng)采用的硬件、監(jiān)測(cè)方法和技術(shù)限制進(jìn)行了論述。同時(shí),研究人員比較了試驗(yàn)設(shè)備現(xiàn)場(chǎng)觀察到的和遠(yuǎn)程傳感器獲得的數(shù)據(jù),并通過(guò)數(shù)據(jù)分析來(lái)實(shí)現(xiàn)水力學(xué)危險(xiǎn)現(xiàn)象的早期檢測(cè)及水輪機(jī)震動(dòng)的遠(yuǎn)程監(jiān)控。
水電站地震監(jiān)測(cè);遠(yuǎn)程監(jiān)控;水輪機(jī)震動(dòng);俄羅斯
奇爾克伊(Chirkey)水電站位于格魯吉亞北高加索蘇拉克(Sulak)河上。電站大壩為混凝土拱壩,壩高232.5 m,壩長(zhǎng)338 m。主廠房位于大壩旁,共安裝4臺(tái)混流式水輪發(fā)電機(jī)組。由于斷層構(gòu)造及地殼運(yùn)動(dòng)活躍,導(dǎo)致該地區(qū)地震活動(dòng)強(qiáng)烈。
1 網(wǎng)絡(luò)監(jiān)測(cè)
1.1 網(wǎng)絡(luò)建設(shè)原則和監(jiān)測(cè)要求
為防止事故發(fā)生,水電站通常配備獨(dú)立的監(jiān)測(cè)系統(tǒng),以便對(duì)水庫(kù)地震、大壩結(jié)構(gòu)和水輪震動(dòng)進(jìn)行監(jiān)測(cè),這在許多國(guó)家(ANSI / ASA 標(biāo)準(zhǔn),1990年)屬?gòu)?qiáng)制性標(biāo)準(zhǔn)。這是模擬數(shù)據(jù)采集和處理器不能充分利用傳感器潛能的歷史原因。因此,在這種情況下,只能選擇低精度傳感器并人為地將地震震動(dòng)場(chǎng)劃分為頻帶,每個(gè)傳感器負(fù)責(zé)監(jiān)測(cè)幾種類型的震動(dòng),包括地震、大壩震動(dòng)、水輪機(jī)及其部件的震動(dòng)。
通過(guò)詳細(xì)檢查每一組監(jiān)測(cè)要求,可以確定哪些指標(biāo)限制是具有實(shí)質(zhì)性的,哪些指標(biāo)限制是由硬件局限導(dǎo)致的(見(jiàn)表1)。表1中前兩種類型的監(jiān)測(cè)系統(tǒng)可以組合成單個(gè)網(wǎng)絡(luò),用于監(jiān)測(cè)水輪機(jī)震動(dòng)。
1.2 電站監(jiān)測(cè)方案
地震儀沿著大壩的兩個(gè)內(nèi)部廊道、壩內(nèi)部分壩縫處、主廠房和7 km外的杜布基(Dubki)地震臺(tái)(DBC,俄羅斯地球物理調(diào)查)布置。數(shù)據(jù)采集中心位于壩脊附近,包括一部可實(shí)現(xiàn)與執(zhí)行時(shí)間同步的GPS。監(jiān)測(cè)網(wǎng)絡(luò)中所有傳感器之間的內(nèi)部聯(lián)系,以及與杜布基地震臺(tái)之間的通信均采用光纖電纜。該監(jiān)測(cè)系統(tǒng)于2012年投入使用,至今已運(yùn)行4 a,未出現(xiàn)任何故障,因此決定擴(kuò)大監(jiān)測(cè)網(wǎng)絡(luò)。
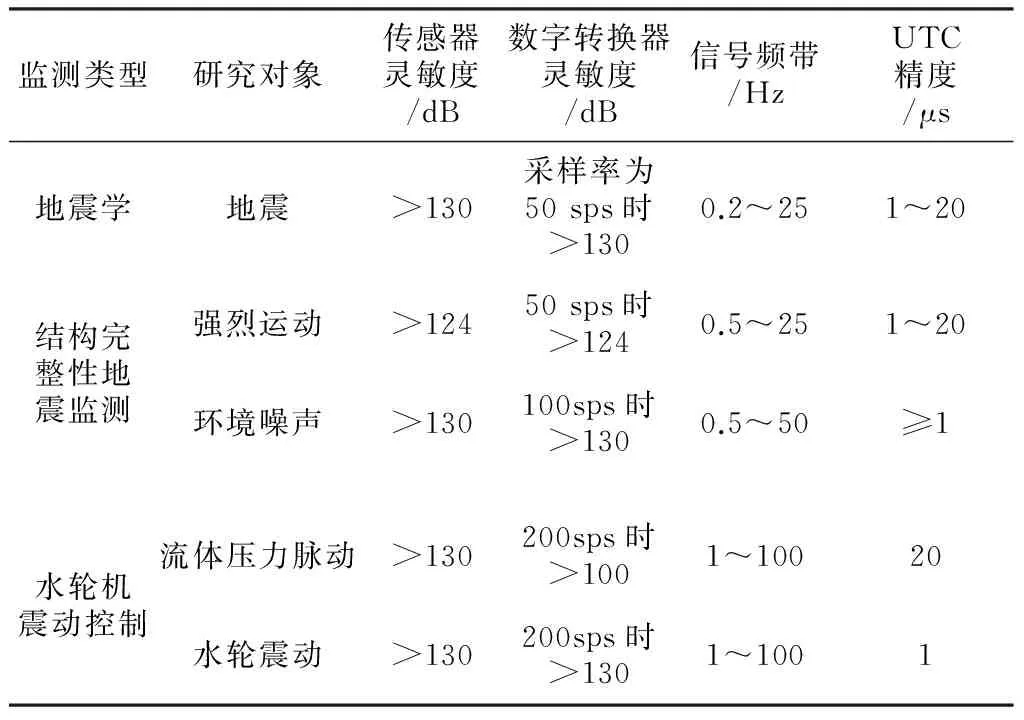
表1 水電站地震監(jiān)測(cè)網(wǎng)絡(luò)的主要要求
2 壓力脈動(dòng)觀測(cè)
2016年,奇爾克伊水電站的觀測(cè)網(wǎng)絡(luò)主要用于監(jiān)測(cè)大壩的自振頻率、地震,及其對(duì)大壩的影響和響應(yīng)。所有操作均基于傳統(tǒng)方法進(jìn)行,新監(jiān)測(cè)系統(tǒng)的重要功能之一是通過(guò)在遠(yuǎn)程的地震觀測(cè)點(diǎn)來(lái)檢測(cè)水輪機(jī)的脈動(dòng)異常。目前已在大量文獻(xiàn)中刊出專門致力于研究異常脈動(dòng)和汽蝕現(xiàn)象的內(nèi)容,研究中大多采用計(jì)算機(jī)模擬描述不同階段的詳細(xì)運(yùn)行過(guò)程。其中,水壓和電力負(fù)載的運(yùn)行參數(shù)受到特別關(guān)注。通過(guò)比較模擬值與經(jīng)驗(yàn)觀測(cè)值,得出模型結(jié)果與結(jié)論。阿別列夫(Abelev)等學(xué)者確定了水壓與水輪機(jī)功率導(dǎo)致危險(xiǎn)事件的具體比率。在此基礎(chǔ)上,壓力-功率圖被分成水輪機(jī)可以或不能運(yùn)行的若干區(qū)間。
研究中確定了監(jiān)測(cè)震動(dòng)的標(biāo)準(zhǔn),可以指示有害汽蝕風(fēng)險(xiǎn)是否不斷增加。尤其當(dāng)壓力和功率值未知且汽蝕過(guò)程開(kāi)始時(shí),水輪機(jī)監(jiān)測(cè)的實(shí)踐價(jià)值就得以體現(xiàn)。 有學(xué)者在2014~2015年探討并初步解決了該問(wèn)題。然而,其提供的數(shù)據(jù)是通過(guò)直接放置在水輪機(jī)上的傳感器獲得,并未給出有關(guān)遠(yuǎn)程測(cè)點(diǎn)的信息。
2.1 水輪機(jī)運(yùn)行檢測(cè)
在對(duì)奇爾克伊水電站進(jìn)行現(xiàn)場(chǎng)分析之前,俄羅斯能源結(jié)構(gòu)研究所(JSC Silovye Mashiny)開(kāi)展了混流式水輪機(jī)的研究,試驗(yàn)的目的之一是識(shí)別汽蝕脈動(dòng)特征,以確認(rèn)實(shí)現(xiàn)遠(yuǎn)程監(jiān)測(cè)這些事件并確定出傳感器的最佳參數(shù)。試驗(yàn)設(shè)備包括三軸加速度計(jì)Guralp CMG-5T(模擬)和CMG-5TDE(數(shù)字)、模擬旋轉(zhuǎn)速度計(jì)METR-03、數(shù)據(jù)記錄器ADAS3(與奇爾克伊水電站使用的相同)和GSR-24(GeoSIG有限公司)。
試驗(yàn)將地震記錄與IVP-05-0.8 / 200振動(dòng)位移傳感器的參考信號(hào)進(jìn)行了比較。在試驗(yàn)前,將所有傳感器放置在一塊平板上,這樣不僅能確保均能接收并同步記錄下環(huán)境噪聲信號(hào),而且還保證了所有傳感器之間的相關(guān)性。
傳感器IVP-05-0.8/200連接到出口管的側(cè)面和背面。加速度計(jì)布置在水輪機(jī)蝸殼殼體、支架基座、附近地面和15 m外的各點(diǎn)上,且加速度計(jì)軸線垂直于水流方向。最終每個(gè)點(diǎn)記錄的信息是相似的,這表明在遠(yuǎn)程位置進(jìn)行振動(dòng)診斷的方案是可行的。
通過(guò)對(duì)混流式水輪機(jī)9種不同運(yùn)行模式的研究分析,確定了水輪機(jī)減小轉(zhuǎn)速與減小排水量的相互關(guān)系及最佳運(yùn)行模式,同時(shí)指出了兩種可能產(chǎn)生有害汽蝕的運(yùn)行模式。
功率譜是一種強(qiáng)大的工具,可以生成相對(duì)于3D時(shí)間頻譜分析(STAN)的2D功率譜曲線圖。為了將工作臺(tái)產(chǎn)生的譜峰與源自管中的譜峰區(qū)分開(kāi),比較了不同機(jī)器啟動(dòng)時(shí)的譜結(jié)果與來(lái)自測(cè)試運(yùn)行的譜結(jié)果。通過(guò)分析工作臺(tái)外殼和地板上的傳感器信號(hào),發(fā)現(xiàn)在這兩個(gè)觀察點(diǎn),10 Hz及以上的特征最大頻率較明顯,從而表明水輪機(jī)振動(dòng)傳播遠(yuǎn)遠(yuǎn)超過(guò)工作臺(tái),如同在奇爾克伊水電站案例中,甚至在壩側(cè)接頭處也檢測(cè)到了水輪機(jī)振動(dòng)信號(hào)。
2.2 壓力脈動(dòng)監(jiān)測(cè)方案
在奇爾克伊水電站監(jiān)測(cè)方案的地震震動(dòng)控制系統(tǒng)中,當(dāng)?shù)卣鸢l(fā)生時(shí),水輪機(jī)隨即啟動(dòng)。在應(yīng)用濾波的情況下,系統(tǒng)的大動(dòng)態(tài)范圍允許在大壩接點(diǎn)和主廠房中的地震圖上記錄兩種震動(dòng)。這充分表明,如果地震監(jiān)測(cè)與震動(dòng)控制相結(jié)合,系統(tǒng)則能夠?qū)⑺啓C(jī)自身運(yùn)動(dòng)與由地震引起的位移自動(dòng)區(qū)分開(kāi)。
3 結(jié)果與討論
3.1 試驗(yàn)臺(tái)試驗(yàn)
3.1.1 傳感器比較
通過(guò)同步記錄兩個(gè)傳感器的信號(hào),將不同設(shè)備的功率譜,特別是大于7Hz的譜值進(jìn)行對(duì)比。在較低頻率范圍內(nèi),管道上測(cè)量的位移值明顯比機(jī)蓋上的大,這是由于在一定頻率范圍內(nèi)對(duì)機(jī)器部件做了減振處理。
由于難以將輸出信號(hào)轉(zhuǎn)換為單一維度,因此將線性傳感器(加速度計(jì)和IVP-05-0.8/200)和旋轉(zhuǎn)傳感器獲取的數(shù)據(jù)進(jìn)行對(duì)比是件復(fù)雜的事。然而,如果考慮信號(hào)的時(shí)間流,由于在空穴褶皺頻率下的旋轉(zhuǎn)運(yùn)動(dòng),則可利用STAN圖進(jìn)行比較。
3.1.2 水力脈動(dòng)識(shí)別
通過(guò)分析其中3種運(yùn)行模式,包含來(lái)自傳感器的信號(hào)、其測(cè)量水輪機(jī)附近的加速度和旋轉(zhuǎn)振蕩速度以及水輪機(jī)上的震動(dòng)位移,線性傳感器幾乎無(wú)法區(qū)分操作方案,而旋轉(zhuǎn)傳感器能清楚地指示方案之間的差異,旋轉(zhuǎn)頻率始終顯示為垂直線。
相干時(shí)間分析(CTAN)類似于STAN,其計(jì)算滑動(dòng)時(shí)間窗口中兩個(gè)記錄的相干函數(shù),三分量傳感器的兩個(gè)分量測(cè)量相位相關(guān)。
所有研究結(jié)果均表明,旋轉(zhuǎn)振蕩傳感器在水力脈動(dòng)檢測(cè)上非常有效。也可以使用線性傳感器、加速度計(jì)和振動(dòng)位移檢測(cè)器,但其效率均較低。
3.2 水輪機(jī)運(yùn)行監(jiān)測(cè)
在水輪機(jī)室中的加速度計(jì)STAN圖(其中部件順流向布置)上,具有明顯的主旋轉(zhuǎn)頻率f0=3.33 Hz和 6.66 Hz、9.99 Hz的諧波。
STAN圖日變化表明,當(dāng)功率值從建議運(yùn)行區(qū)域與非建議運(yùn)行區(qū)域邊界上快速下降到非建議運(yùn)行區(qū)域中時(shí),汽蝕發(fā)生。功率連續(xù)的快速增大,阻止了情況的進(jìn)一步惡化,同時(shí) 2.7 Hz處的振蕩消失。在大壩和側(cè)縫上均可不同程度地檢測(cè)到這些低頻振蕩。
4 結(jié) 語(yǔ)
本文提出了結(jié)合不同監(jiān)測(cè)方法的新監(jiān)測(cè)手段,且將其應(yīng)用于高加索地區(qū)水電站的一系列監(jiān)測(cè)系統(tǒng)上尚屬首例。研究表明,震動(dòng)診斷是水輪機(jī)地震監(jiān)測(cè)的有效補(bǔ)充,可實(shí)現(xiàn)在水輪機(jī)出口處即時(shí)檢測(cè)水流擾動(dòng)。該系統(tǒng)可區(qū)分地震、水輪機(jī)啟動(dòng)和其他震動(dòng)。
旋轉(zhuǎn)震動(dòng)傳感器是重要的監(jiān)測(cè)裝置,與水輪機(jī)室中的加速度計(jì)一起安裝時(shí)可以提高汽蝕危險(xiǎn)檢測(cè)的效率。
2017-06-30
1006-0081(2017)12-0017-02
P315
A
錢亞孫言譯
(編輯:唐湘茜)
