光學偵察衛星任務時效性評估研究
2018-01-05 01:11:46趙程亮張占月
計算機測量與控制 2017年12期
趙程亮,張占月,趙 雙,劉 瑤
(1.裝備學院 研究生管理大隊,北京 101416;2.裝備學院 航天指揮系,北京 101416)
光學偵察衛星任務時效性評估研究
趙程亮1,張占月2,趙 雙1,劉 瑤1
(1.裝備學院 研究生管理大隊,北京 101416;2.裝備學院 航天指揮系,北京 101416)
衛星任務時效性直接影響衛星的任務效益,針對光學偵察衛星任務流程,詳細分析任務相關環節并建立了數學模型;從時間鏈上對偵察衛星姿態調節時間、過境時間、數據下傳時間三個任務環節進行了仿真計算,并比較了多顆衛星對具體觀測任務的相關時效差異以及相關影響因素,有效反映了偵察衛星任務效能,為光學偵察衛星任務時效性分析及效能評估提供了依據,對衛星觀測任務方案時間任務效能分析預評估有重要的應用價值。
光學偵察衛星;任務流程;時效性;效能評估
0 引言
在現代戰爭中,偵察衛星發揮的作用越來越重要,其作戰應用的深度不斷加深,廣度不斷拓展,是獲取信息情報來源的重要偵察工具[1]。戰場上的爭分奪秒對偵察衛星的觀測時間有著極為嚴格的時間要求,信息情報獲取的時間每一秒都極為寶貴。因此,分析光學偵察衛星從接收任務指令到完成觀測數據下傳這樣一個任務流程時間有重要的應用指導意義,更方便的供指揮員斟酌參考、決策指揮[2]。
光學偵察衛星是通過衛星星載照相機或攝像機等偵察觀測設備,從軌道對目標實施偵察、監視以及搜集地面信息。本文以光學偵察衛星為研究對象,從衛星接收任務指令開始到衛星數據下傳完畢對衛星任務觀測過程時效性進行詳細分析與評估。因衛星在接收指令后,衛星任務期間的在軌飛行時間與具體任務、衛星軌道參數有關,在此不再建模求解。主要考慮建立衛星姿態調整、衛星過境成像、衛星數據下傳等衛星任務流程相關數學模型,最后結合具體任務實例對衛星的觀測任務時效進行仿真驗證。
1 衛星載荷側擺調節時間計算模型
1.1 偵察目標在地固系下的坐標

(1)
由于地球的形狀并不是規則圓球體,所以上式中Re取地球平均半徑會引起較大誤差,考慮地球形狀下的地球半徑[4]為:
(2)
Rα、Rα為地球的赤道半徑與極半徑。
1.2 偵察衛星在地固系下的坐標
上一下小節計算給出了偵察目標在地心固連坐標系下的坐標計算數學模型,在本小節將建立偵察衛星在地心固連坐標系下的坐標,由此計算衛星側擺角度。其主要思路是首先求得衛星在地心慣性坐標系下的坐標,然后由地心慣性坐標系與地心固連坐標系的轉換關系求得衛星在地心固連坐標系下的坐標。衛星在任意時刻的地心距r為:
(3)
式中,a為軌道半長軸,e為偏心率,f為真近地點角。

(4)
式中,Ω為升交點赤經,u為緯度幅角,r為地心距,i為軌道傾角
設Φ0為初始時刻t0地球慣性坐標系與地球固連坐標系的夾角,ω為地球自轉角速度,則t時刻地慣系與地固系的夾角為:
Φ(t)=Φ0+ω(t-t0)
(5)
由地心固連坐標系與地心慣性坐標系的轉換關系[5]可知衛星在地心固連坐標系下的坐標
(6)
由此便知道了地面觀測目標與衛星任意時刻在地固系下的坐標,并求得衛星的側擺角度θ。設衛星側擺角速度為ω,則衛星側擺時間為:
(7)
2 衛星單次過境觀測時間計算模型
衛星單次過境觀測時間[6]指的是衛星接收任務指令開機并調整好姿態后對觀測目標地點進行觀測的時間窗口。觀測時間與衛星的軌道參數和目標區域的大小有關。當前大多數光學偵察衛星觀測都是以掃描方式進行成像[7],由于衛星的在軌高速運動,衛星過境時間非常短暫。衛星單次過境如圖1所示,衛星由A點飛往D點,當衛星與目標區域仰角為φ時開始觀測,衛星觀測時間窗口為AD段,B、C為衛星在目標區域正上方的位置。目標區域EF的緯度跨度為Φ。

圖1 衛星單次過境觀測
由于衛星的觀測時間非常短暫,在此認為衛星在成像時間窗口內速度與軌道高度為定值,衛星在成像窗口內軌道高度為:
(8)
當前時刻衛星速度大小為:
(9)
式中,μ為地球引力常數,f為真近地點角。R為地球半徑,a為軌道半長軸,e為軌道偏心率。
由于目標區域兩側仰角φ相同,所以AD段長度計算公式為:
AD=AB+BC+CD=2AB+EF
(10)
將△ABE近似看做直角三角形,則:
(11)
EF=ΦR
(12)
則衛星單次過境觀測時間為:
(13)
3 衛星數據下傳時間計算模型
衛星在完成觀測任務并調整好姿態以后,需要到達地面站接收范圍將觀測數據進行數據下傳[8]。如圖2所示,衛星在到達T1時刻時,地面站開始準備進行數據接收。在T2時刻地面站可以捕捉到衛星信號,但此時信號強度不足以完成傳輸。在T3時刻,地面站可以穩定捕獲到衛星并完成穩定跟蹤與數據傳輸,傳輸時間為T3到T4時刻的這段時間。T5時刻脫離地面站控制范圍并完成任務。
由此計算衛星數據下傳時間以確定衛星是否能夠在數傳時間T3-T4這段時間內完成數據傳輸具有重要參考意義。衛星數傳時間與數據信息量大小和數傳速率有關,數據信息量主要與衛星觀測成像面積以及成像分辨率有關。
3.1 衛星觀測覆蓋區域面積計算
偵察衛星在經過目標區域進行過境觀測時開始進行觀測成像,在順著星下線以某一側擺角度形成一條觀測條帶,觀測條帶的信息即為初始成像數據信息。衛星觀測條帶面積與衛星遙感器性能、軌道特性、側擺情況有直接關系,成像面積是計算衛星成像信息量的基礎。如圖3所示,衛星在t1時刻星下點為N點,側擺角度為θ,在觀測時間內衛星掃描過的面積為矩形ABA1B1。因此,若想求得衛星觀測的覆蓋面積,便首先需要求出觀測條帶掃描距離[9]。
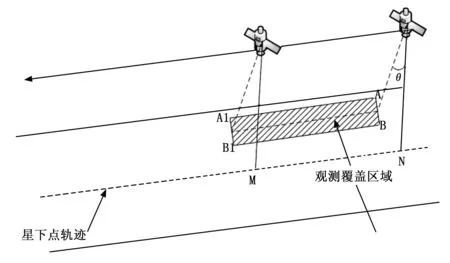
圖3 衛星單次過境覆蓋區域
由于衛星的觀測條帶平行于衛星的星下點軌跡,所以AA1=BB1=MN,故只需要計算出衛星過境觀測條帶的長度。衛星觀測條帶的長度與衛星在開始觀測與結束觀測的兩個時間節點的星下點有關。偵察衛星在地心軌道坐標系中的坐標為(r,0,0),由地心軌道坐標系到地心慣性坐標系之間的轉換可知衛星在地心慣性坐標系下的坐標為:
式中,Ω為升交點赤經,i為軌道傾角,u為緯度幅角,由地心慣性坐標系到地心固連坐標系下轉換為:
(14)
θ為當前時刻地心固連坐標系與地心慣性坐標系下的夾角。
由衛星星下點在地心固連坐標系中的坐標可以求得星下點的經緯度[10]:
(15)
如圖4所示,已知AB兩點的經緯度坐標A(λ1,φ1)B(λ2,φ2),N為北極點,O為地球半徑。在球面三角形NAB中:
(16)
AB對應的弧長為:
r=arcAB·RE
(17)

圖4 地球任意兩點球面距離
計算衛星觀測條帶寬度如圖5所示,s為衛星在t時刻位置,A為衛星星下點軌跡,θ為衛星載荷側擺角度,Δg為衛星視場角,LR長度即為衛星觀測條帶的寬度。
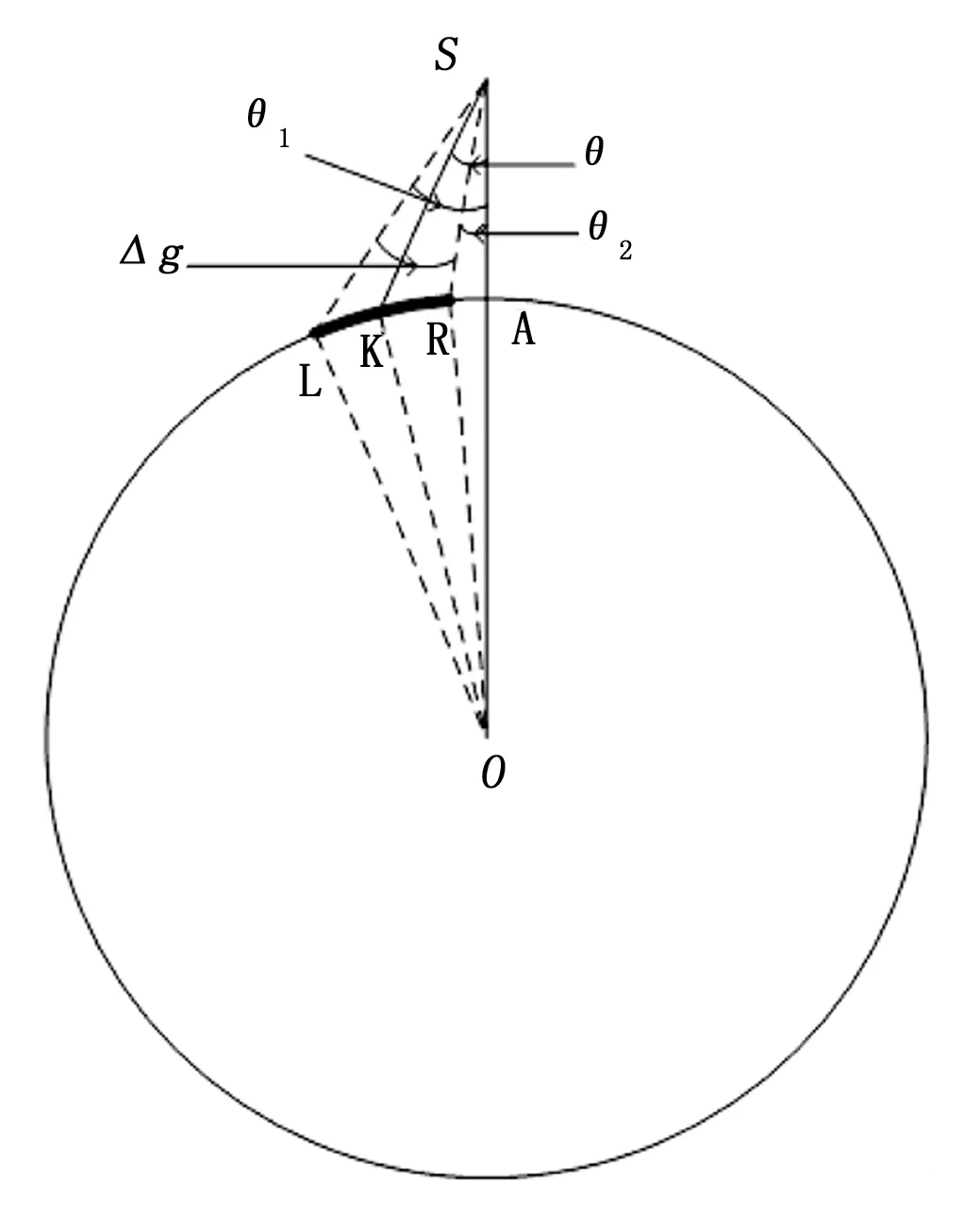
圖5 偵察衛星成像側視圖
在△SRO中:
(18)
(19)
(20)
H為衛星當前軌道高度,RE為地球半徑同理可求得SL。
將LR視為直線,在△SLR中:
(21)
3.2 地面站對偵察衛星可見性判斷計算模型
偵察衛星沿著預定軌道高速運行,受限于地球的遮擋和地面站設備性能參數,對于地面某一地面站來說,偵察衛星在某個圈次,對于地面站的可見性只有兩種情況,不可見或者一段可見,并且可見弧段的長短與衛星的軌道參數、地面站位置、及測控設備相關。地面站與航天器之間的可見性取決于地面站與航天器之間的仰角。當衛星與地面站大于最小仰角臨界值αmin與最大仰角臨界值αmax的時候,地面站與衛星可見,此時可以進行數據傳輸。
設地面站經緯度坐標為(λ,φ),則由式(1)可得地面站在地心固連坐標系下的坐標(xt,yt,zt)。根據衛星的軌道根數以及式(6),便可得出衛星在地心固連坐標系下的直角坐標(xs,ys,zs),此時由航天器與地面站之間的距離d、地球半徑Re、以及地心距r可計算得出地面站與航天器連線和地面站與地心連線之間的張角α1,仰角與張角之間相差90°即:
(22)
顯然,如果αmin≤α1-90°≤αmax,則此時衛星與地面站之間可進行數據傳輸,否則兩者之間不可見,不能進行數據傳輸以及相應的跟蹤控制。
3.3 光學偵察衛星信息下傳時間計算
光學偵察衛星在獲取地面影像信息后,一般先將成像信息進行存儲,在與地面站或中繼衛星滿足可傳輸條件的情況下,進行數據下傳。因此衛星信息數據下傳時間為:
Trd=Tw+Td
(23)
式中,Tw為衛星偵測信息后數據等待下傳時間,Td為與地面站滿足可傳輸條件后信息下傳時間。
衛星偵測信息后數據等待下傳時間Tw主要根據衛星與地面站可見性來確定,在此采用仿真計算方法,具體實現步驟如下:
1)根據地面站可用數量確定推進步長和仿真周期,其中步長根據具體任務精確度來確定,仿真周期為對信息延遲的最大忍受時間。
2)推進步長,由3.2節所述方法判斷衛星與地面站的可見性,若可見則跳出循環,反之繼續。
3)判斷是否達到仿真周期,未達到則繼續推進步長,反之返回,Tw超過最大限定時間,判定無效。
信息下傳時間Td主要與成像信息數據量大小以及數據下

表1 衛星相關性能指標

表2 仿真計算結果
傳速率來決定。數據信息量大小與衛星成像面積,衛星影像分辨率有關。光學成像偵察衛星獲取的信息量I(單位為bit)[8]計算公式為:
(24)
kp為圖像壓縮比;kb為波段數;Ag為成像面積;rg為地面分辨力;Cn為每象元灰度數;Bn為每象元亮度數。
衛星信息傳輸速率為v,則衛星影像信息傳輸時間為:
Td=I/v
(25)
4 仿真計算實例
衛星觀測目標區域緯度范圍為[37°N,38°N],經度范圍為[119°E,120°E]。地面站坐標(122°,49°)仿真時間為2017年3月20日04:00至2017年3月21日04:00,衛星參數參照美國”數字全球”公司商業遙感系列衛星[11],相關衛星性能參數如表1所示:
利用表1衛星性能指標,結合所建立衛星姿態調節時間計算模型、衛星過境時間模型、數據下傳時間模型,同時基于衛星的星歷參數及地球橢球模型,仿真計算結果如表2所示。
仿真計算結果從衛星側擺角度、側擺時間、衛星過境時間、成像面積、信息等待下傳時間、數傳時間、執行任務時間七個方面進行比較分析。由計算結果可知,衛星針對同一目標區域的側擺角度相差不大,由此所需要的側擺調節時間小有差異。在衛星過境成像時間上,過境時間長短主要與目標區域大小以及衛星軌道高度有關,由于四顆衛星軌道高度之間相差不大以及在軌高速飛行,使得仿真結果中過境時間非常接近。衛星成像條帶面積與衛星的成像掃描寬度以及成像時間有關,在不考慮實時數據下傳的情況下(偵察同時進行數據下傳),同時又會受限于最大成像條帶距離以及衛星星上存儲容量。WorldView-2在針對同一任務中具有最大觀測條帶,其主要原因為擁有最大的成像掃描幅寬(17.6km),其他衛星成像掃描幅寬分別為16.4km、16.5km、15.2km。QuickBird-2衛星在成像面積上與其他觀測衛星具有較大偏差,這是由于QuickBird-2號衛星單次觀測條帶最高為165km。信息等待下傳時間方面,該時間主要受限于衛星軌道要素以及地面站的地理位置分布,會因具體任務具體可用衛星資源以及地面站約束條件變化,因此要具體任務具體分析,找出最適合本次觀測任務的方案。GeoEye-1衛星在數傳時間上明顯高于其他衛星,其原因是因為GeoEye-1衛星具有較高地面分辨率,影像質量較高,信息量大。故GeoEye-1衛星在任務時效性上有較大差異。總任務時間是最能反應衛星任務執行時效性的重要因素,在觀測任務滿足分辨率約束條件以及覆蓋性等約束條件基礎上上,衛星任務時效性是最能反映任務效率的評估指標。在本次仿真結果中可以看出GeoEye-1衛星在執行本次觀測任務中具有最優任務時效性能。
5 結論
本文針對成像偵察衛星任務應用流程,從衛星接收指令上傳開始至衛星數據下傳結束。對衛星任務流程各個環節進行詳細分解并建立相關數學模型,對衛星的各個任務環節時效性進行了仿真分析。并比較了多星對具體觀測任務的完成能力,詳細分析了影響任務時效性的各個約束條件。為成像偵察衛星時效性評估提供依據。但在模型細節上仍然有待完善,比如在衛星姿態調節模型上沒有建立衛星姿態穩定相關模型,有待于更深一步研究。
[1] 李 智,張占月,孫 琰.現代太空戰[M]. 北京:國防大學出版社,2016.
[2] Nielsen P E. 太空武器[M]. 張占月,張志威,唐立文,譯. 北京:國防工業出版社,2014.
[3] 郭 浩,邱滌珊,黃 維. 調姿時間對敏捷成像衛星任務規劃影響仿真[J]. 裝備指揮技術學院學報,2012,23(1):70-74.
[4] 仲惟超. 航天器軌道和姿態參數對光學成像的影響分析[D].哈爾濱:哈爾濱工業大學,2009.
[5] 盛衛東. 天基光學監視目標跟蹤技術研究[D]. 長沙:國防科學技術大學,2011.
[6] 郝會成. 敏捷衛星任務規劃問題建模及求解方法研究[D]. 哈爾濱:哈爾濱工業大學,2013.
[7] 徐一帆. 天基海洋移動目標監視的聯合調度問題研究[D].長沙:國防科學技術大學,2011.
[8] 趙和鵬. 多地面站衛星數據接收任務規劃問題研究[D]. 電子科技大學,2013.
[9] 賀仁杰,李菊芳,姚 鋒. 成像偵察衛星任務規劃技術[M]. 北京:科學出版社,2010.
[10] 曹裕華,馮書興,管清波. 航天器軍事應用建模與仿真[M]. 北京:國防工業出版社,2010.
[12] 李 穎,楊 慶,盧 雪.國外典型航天系統手冊[M]. 北京:國防工業出版社,2016.
Evaluation for Mission Timeliness of Optical Reconnaissance Satellite
Zhao Chengliang1,Zhang Zhanyue2,Zhao Shuang1,Liu Yao1
(1.Department of Graduate Management,Equipment Academy,Beijing 101416,China;2.Department of Space Command,Equipment Academy,Beijing 101416,China)
The timeliness of satellite mission directly affects the efficacy of satellite. Aiming at the task process of optical reconnaissance satellite, detailed analysis of the relevant aspects of the task and established mathematical model. The simulation calculation of reconnaissance satellites' attitude adjustment time, transit time and data transmission time is carried out, and compared the relative difference of the multi-satellite to the specific observation task, effectively reflected the reconnaissance satellite mission efficacy, which provides a basis for the timeliness analysis and efficacy evaluation of optical reconnaissance satellite missions.
optical reconnaissance satellite;task process;timeliness of mission;efficacy evaluation
2017-05-14;
2017-05-26。
趙程亮(1991-),男,河北衡水人,碩士研究生,主要從事天基信息支援方向的研究。
張占月(1973-),男,河北吳橋人,碩士,教授,博士研究生導師,主要從事航天任務設計與分析方向的研究。
1671-4598(2017)12-0291-04
10.16526/j.cnki.11-4762/tp.2017.12.075
V474
A
