自裝卸式馱背運(yùn)輸車端部底架靜強(qiáng)度分析及試驗(yàn)對(duì)比
2020-11-28 09:45:30王洪昆袁博
裝備維修技術(shù) 2020年15期
王洪昆 袁博
摘 要:基于自裝卸式馱背運(yùn)輸車的結(jié)構(gòu)受力特點(diǎn),從整車結(jié)構(gòu)受力的角度進(jìn)行分析,以端部底架為研究對(duì)象,運(yùn)用有限元仿真技術(shù),對(duì)其進(jìn)行靜強(qiáng)度校核,并與試驗(yàn)數(shù)據(jù)進(jìn)行對(duì)比。結(jié)果表明:端部底架結(jié)構(gòu)設(shè)計(jì)合理,滿足行業(yè)內(nèi)相關(guān)標(biāo)準(zhǔn)要求。
關(guān)鍵詞:自裝卸式馱背車;端部底架;靜強(qiáng)度;試驗(yàn)
引言
為貨主提供“門到門”的運(yùn)輸服務(wù),是鐵路貨運(yùn)組織改革的重要內(nèi)容之一,而開展鐵路馱背運(yùn)輸是實(shí)現(xiàn)“門到門”運(yùn)輸?shù)淖詈梅绞街弧hF路馱背運(yùn)輸是指公路貨車或半掛車裝載貨物后在始發(fā)地火車站自行開上鐵路專用車輛,通過(guò)鐵路完成長(zhǎng)距離運(yùn)輸,到達(dá)目的地火車站后,公路貨車自行開下鐵路專用車輛并駛往最終目的地的一種便捷運(yùn)輸方式。這種運(yùn)輸方式已在歐美國(guó)家成熟應(yīng)用,但目前在我國(guó)鐵路馱背運(yùn)輸還是空白。因此,開展馱背運(yùn)輸車的研制及相關(guān)技術(shù)研究工作是我國(guó)未來(lái)鐵路貨車研發(fā)部門的重點(diǎn)工作之一。
1、結(jié)構(gòu)特點(diǎn)及受力分析
自裝卸式馱背運(yùn)輸車是為運(yùn)輸公路貨車或半掛車而設(shè)計(jì)的鐵路專用車輛。該車為凹底承載結(jié)構(gòu),進(jìn)行裝卸作業(yè)時(shí),車輛以地面三相四線制AC380V電源為動(dòng)力,液壓驅(qū)動(dòng),電氣控制,可實(shí)現(xiàn)凹底架雙側(cè)旋轉(zhuǎn),適應(yīng)公路貨車自行上下、不摘鉤裝卸作業(yè)的要求;端部底架和凹底架的連接及載荷傳遞采用鉗夾車成熟結(jié)構(gòu),如圖1所示。車輛主要由車體、轉(zhuǎn)向架、鉤緩裝置及其他控制系統(tǒng)組成;車體為全鋼焊接結(jié)構(gòu),由端部底架、凹底架及其他移動(dòng)支撐裝置組成。
由于自裝卸式馱背運(yùn)輸車凹底架和端部底架是獨(dú)立部件,且連接采用鉗夾車原理,受力關(guān)系清晰,故可將二者分別作為研究對(duì)象,對(duì)其進(jìn)行強(qiáng)度校核,本文將僅對(duì)端部底架進(jìn)行靜強(qiáng)度分析。
其中:R1:1位心盤載荷;R2:2位心盤載荷;G貨:公路貨車載荷;G自:車體質(zhì)量;Gd:端部底架及車鉤緩沖裝置質(zhì)量;G1:凹底架提供的垂向載荷;F1:凹底架提供的拉伸載荷;F2:凹底架提供的壓縮載荷;FL:縱向拉伸載荷;FY:縱向壓縮載荷;Ga:凹底架質(zhì)量。
2、自裝卸式馱背運(yùn)輸車端部底架靜強(qiáng)度分析
2.1 有限元網(wǎng)格劃分
自裝卸式馱背運(yùn)輸車端部底架由牽引梁、枕梁、側(cè)梁、端梁、滑道、縱向支撐、垂向支撐、碰頭裝置、凹底架縱向支撐自鎖裝置、移動(dòng)滑臺(tái)導(dǎo)向裝置、齒輪支座、液壓油缸支座、移動(dòng)滑臺(tái)平衡座等組成。根據(jù)其結(jié)構(gòu)的特點(diǎn),且為了提高模型的精度,本次有限元建模時(shí)主要采用八節(jié)點(diǎn)六面體單元,單元類型為solid185,單元長(zhǎng)度20mm,模型共劃分節(jié)點(diǎn)144539個(gè),單元96500個(gè)。
2.2 材料參數(shù)定義
端部底架主要材料采用屈服強(qiáng)度為345MPa和450MPa的高強(qiáng)度耐候鋼,端部底架與凹底架垂向支撐連接部位主要采用HG785E的高級(jí)鋼,材料機(jī)械性能見表1。
根據(jù)以上材料參數(shù),設(shè)置材料的非線性,一般情況下將非線性材料的應(yīng)力應(yīng)變曲線假想成雙線性,為了使每次運(yùn)算均能夠收斂,假設(shè)應(yīng)力超過(guò)斷裂強(qiáng)度材料依然能夠承載。
2.3 計(jì)算載荷
依據(jù)TB/T3550.2-2019《機(jī)車車輛強(qiáng)度設(shè)計(jì)及試驗(yàn)鑒定規(guī)范 貨車車體》[1](簡(jiǎn)稱《規(guī)范》)及公路貨車標(biāo)準(zhǔn)相關(guān)規(guī)定,主要考慮以下載荷情況:
1) 垂向靜載荷
包括車體自重、標(biāo)記載重。
根據(jù)我國(guó)公路貨車治超標(biāo)準(zhǔn)及GB1589-2016[2] ,裝載公路貨車的長(zhǎng)度不同、載重也不同。因此,自裝卸式馱背運(yùn)輸車考慮公路貨車最大載重工況為極限工況進(jìn)行計(jì)算,即長(zhǎng)度18100mm,載重55t,如圖3。
3) 側(cè)向力
按垂向載荷施加,大小為10%×垂向靜載荷
4)縱向載荷
縱向拉伸載荷1125kN,作用于端部底架前從板座處;
縱向壓縮載荷1400kN,作用于端部底架后從板座處;
縱向壓縮載荷2250kN,作用于端部底架后從板座處。
2.4計(jì)算工況及評(píng)定
根據(jù)《規(guī)范》要求,對(duì)自裝卸式馱背運(yùn)輸車端部底架進(jìn)行如下工況計(jì)算:
工況1:拉伸組合
縱向拉伸力(1125kN)+垂向總載荷,該合成應(yīng)力應(yīng)不大于第一工況的許用應(yīng)力。
工況2:第一工況壓縮組合
縱向壓縮力(1400kN)+垂向總載荷,該合成應(yīng)力應(yīng)不大于第一工況的許用應(yīng)力。
工況3:第二工況壓縮組合
縱向壓縮力(2250kN)+垂向靜載荷,該合成應(yīng)力應(yīng)不大于第二工況的許用應(yīng)力。
2.5載荷施加
按照《規(guī)范》要求及結(jié)構(gòu)受力特點(diǎn),將相應(yīng)載荷施加于端部底架相應(yīng)位置,如圖4所示。底架自重以加速度的形式施加;貨物傳遞給端部底架的垂向載荷施加于截取的凹底架斷面處,傳遞的縱向載荷以約束的形式施加;縱向拉伸載荷施加于端部底架前從板座,縱向壓縮載荷施加于端部底架后從板座;心盤處施加垂向支撐約束,對(duì)稱面加對(duì)稱約束。
2.6 靜強(qiáng)度計(jì)算結(jié)果
依據(jù)相關(guān)標(biāo)準(zhǔn)對(duì)自裝卸式馱背運(yùn)輸車端部底架靜力學(xué)計(jì)算可知,其結(jié)構(gòu)強(qiáng)度在各計(jì)算工況作用下均滿足設(shè)計(jì)要求,見匯總表3。應(yīng)力輸出結(jié)果全部為Von-Mises當(dāng)量應(yīng)力,應(yīng)力云圖見圖5--圖7。
3、自裝卸式馱背運(yùn)輸車端部底架靜強(qiáng)度試驗(yàn)驗(yàn)證
根據(jù)仿真計(jì)算結(jié)果和結(jié)構(gòu)實(shí)際使用情況,選擇大應(yīng)力點(diǎn)、應(yīng)力集中部位及可能出現(xiàn)疲勞裂紋的位置布置應(yīng)力測(cè)點(diǎn),共布置測(cè)點(diǎn)35個(gè)。
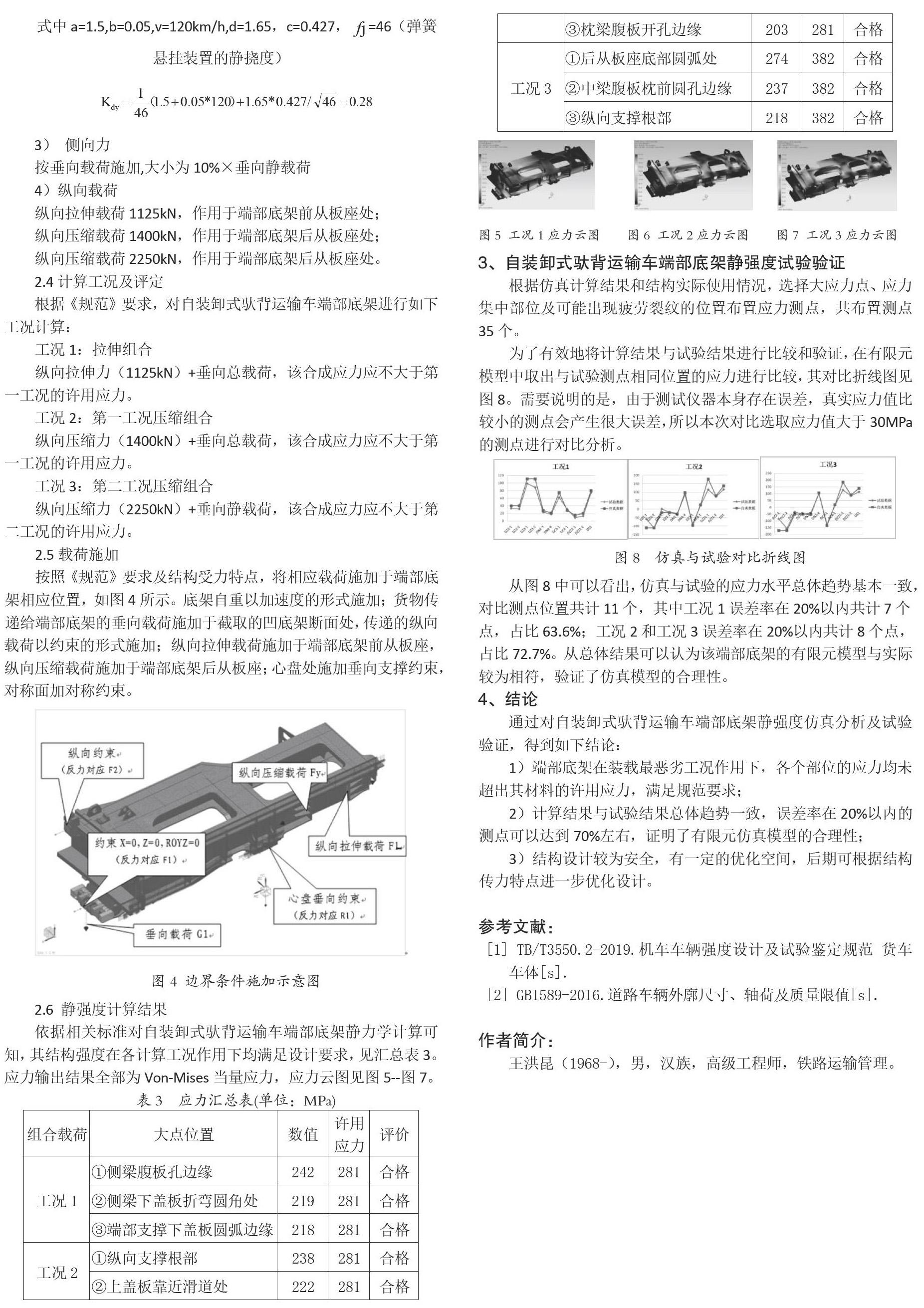
為了有效地將計(jì)算結(jié)果與試驗(yàn)結(jié)果進(jìn)行比較和驗(yàn)證,在有限元模型中取出與試驗(yàn)測(cè)點(diǎn)相同位置的應(yīng)力進(jìn)行比較,其對(duì)比折線圖見圖8。需要說(shuō)明的是,由于測(cè)試儀器本身存在誤差,真實(shí)應(yīng)力值比較小的測(cè)點(diǎn)會(huì)產(chǎn)生很大誤差,所以本次對(duì)比選取應(yīng)力值大于30MPa的測(cè)點(diǎn)進(jìn)行對(duì)比分析。
從圖8中可以看出,仿真與試驗(yàn)的應(yīng)力水平總體趨勢(shì)基本一致,對(duì)比測(cè)點(diǎn)位置共計(jì)11個(gè),其中工況1誤差率在20%以內(nèi)共計(jì)7個(gè)點(diǎn),占比63.6%;工況2和工況3誤差率在20%以內(nèi)共計(jì)8個(gè)點(diǎn),占比72.7%。從總體結(jié)果可以認(rèn)為該端部底架的有限元模型與實(shí)際較為相符,驗(yàn)證了仿真模型的合理性。
4、結(jié)論
通過(guò)對(duì)自裝卸式馱背運(yùn)輸車端部底架靜強(qiáng)度仿真分析及試驗(yàn)驗(yàn)證,得到如下結(jié)論:
1)端部底架在裝載最惡劣工況作用下,各個(gè)部位的應(yīng)力均未超出其材料的許用應(yīng)力,滿足規(guī)范要求;
2)計(jì)算結(jié)果與試驗(yàn)結(jié)果總體趨勢(shì)一致,誤差率在20%以內(nèi)的測(cè)點(diǎn)可以達(dá)到70%左右,證明了有限元仿真模型的合理性;
3)結(jié)構(gòu)設(shè)計(jì)較為安全,有一定的優(yōu)化空間,后期可根據(jù)結(jié)構(gòu)傳力特點(diǎn)進(jìn)一步優(yōu)化設(shè)計(jì)。
參考文獻(xiàn)
[1] TB/T3550.2-2019.機(jī)車車輛強(qiáng)度設(shè)計(jì)及試驗(yàn)鑒定規(guī)范 貨車車體[s].
[2] GB1589-2016.道路車輛外廓尺寸、軸荷及質(zhì)量限值[s].
作者簡(jiǎn)介:王洪昆(1968-),男,漢族,高級(jí)工程師,鐵路運(yùn)輸管理。
