一種行車和駐車變結構形式的鼓式制動器設計及計算
2018-01-09 07:27:21崔祥波李彬
汽車實用技術 2017年12期
崔祥波,李彬
(奇瑞汽車股份有限公司 底盤技術研究院,安徽 蕪湖 241006)
一種行車和駐車變結構形式的鼓式制動器設計及計算
崔祥波,李彬
(奇瑞汽車股份有限公司 底盤技術研究院,安徽 蕪湖 241006)
領從蹄鼓式制動器的特點是:效能因數穩定性高,但效能因數低;雙向自增力鼓式制動器的特點是:效能因數穩定性低,但效能因數高。如果能設計一種制動器,它在行車制動時是領從蹄式,利用其效能因數穩定性高的優點,在駐車制動時變為雙向自增力式,利用其效能因數高的優點,它將是一種很有應用價值的制動器。本文通過一個實例給出這種制動器的制動力矩計算過程,并指明其設計要點。
領從蹄制動器;自增力制動器;變結構制動器;行車制動;駐車制動
引言
領從蹄鼓式制動器,效能因數穩定性高,易于布置駐車杠桿機構,因此常用于緊湊型乘用車的后輪制動器,同時兼做行車和駐車制動器。自增力鼓式制動器的效能因數穩定性是所有鼓式制動器中最低的,已經很少用作乘用車的行車制動器,但因為它的效能因數是所有鼓式制動器中最高的,所以還常用作單一功能的駐車制動器,比如盤中鼓式后制動器總成中的駐車制動器和中央制動器一般都是自增力式。
領從蹄式制動器兼做駐車制動器時(尤其是7座以上的車),常常有駐車制動效能不足問題(因行車制動時后輪只承擔 35%左右的制動力,所以行車制動效能一般都足夠),解決這個問題有4種辦法:(1)提高駐車杠桿機構的機械效率,(2)增大制動器外徑,(3)提高摩擦片的摩擦系數,(4)駐車時變為另一種高效能因數的制動器(比如自增力式)。第一種辦法因結構及材料性能的限制,一般無法優化;第二個辦法往往因布置空間和成本的限制而不可行;第三種辦法會影響行車制動器的效果(因為駐車和行車用的是同一副摩擦片),因此往往也不可行;如果第四種辦法能夠實現,就能達成如下理想效果:(1)成本增加很少,(2)布置空間不變,(3)摩擦系數不變所以不會影響行車制動,(4)行車制動時是領從蹄式,效能因數穩定,駐車制動時是自增力式,效能因數高,同時滿足行車和駐車制動性能要求。
本文研究的某款車后輪制動器,就是這種行車和駐車變結構形式的鼓式制動器。這種制動器的設計計算和設計要點還沒有文獻進行過研究,也比較復雜,本文以右后制動器為例進行具體的分析計算,其分析計算方法具有普遍適用性,不同結構尺寸的制動器可以參考。
1 制動器結構分析
圖1是該右后制動器的二維簡圖和三維數模,該制動器行車制動和駐車制動使用同一副摩擦片,是一種綜合鼓式制動器。行車制動是領從蹄結構,其效能因數的計算在相關文獻中有詳細論述,本文不再贅述。

圖1 右后制動器的二維簡圖和三維數模
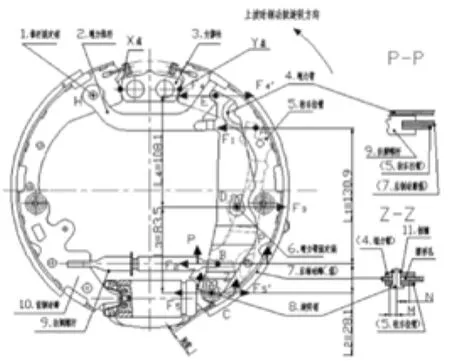
圖2 駐車機構各件的裝配關系
駐車制動器各件的裝配關系見圖1和圖2(圖2是圖1旋轉180°而成):后制動蹄7下方有一個駐車拉臂5,上方有一個增力臂4,拉臂和增力臂通過旋轉銷8形成鉸鏈連接,旋轉銷8穿過后制動蹄7的蹄筋上的一個腰形孔,并可以在腰形孔中有旋轉運動。增力臂4的中間部位通過固定銷6固定在(制動蹄的)蹄筋上,增力臂可以繞固定銷6旋轉。增力臂尾部有個外圓弧,增力推桿2有個內圓弧,兩個圓弧配合也形成一個鉸鏈連接(靠一根小彈簧繃緊,見三維數模)。增力推桿2的另一端通過推桿固定銷1與前制動蹄形成鉸鏈連接。綜上,拉臂、增力臂、增力推桿、(制動蹄的)蹄筋,通過固定銷和一根小彈簧形成鉸鏈連接,形成駐車制動的杠桿系。
行車制動效能因數計算,常用圖1進行分析。駐車制動效能計算若仍用圖1分析,則不容易看出其制動器結構形式,我們將其旋轉180°,變為圖2,可以看出一個雙向自增力結構的雛形,下面詳細分析。
1.1 上坡駐車的情況
駐車時制動鼓逆時針旋轉。如圖2,駐車時,駐車拉臂5在來自駐車拉索的力F1作用下,繞自調螺桿9的支點B旋轉,使旋轉銷8產生繞支點B的旋轉位移,旋轉銷8帶動增力臂4繞支點D(即增力臂固定銷6)旋轉,使增力臂的E點產生繞支點D的旋轉位移(在力系平衡狀態下,只是一種位移趨勢),推動增力推桿2向左移動,并施加給前制動蹄10一個力F4。在 F4以及制動鼓逆時針摩擦旋轉力的共同作用下,前制動蹄10脫離支撐塊3的左側支點X。前制動蹄被張開以后,逆時針旋轉繼而通過自調螺桿推動后制動蹄7繞支點Y形成制動力矩。很顯然,此時制動器變成了“帶滑動支座的自增力式結構”,前制動蹄10為第一蹄,后制動蹄7為第二蹄,支點Y是最終承力點。
1.2 下坡駐車的情況
駐車時制動鼓順時針旋轉。如圖2,駐車時,駐車拉臂5及增力臂4的運動及力系同2.1描述,此時,后制動蹄7在支點D的力F3和制動鼓順時針摩擦旋轉力的共同作用下,脫開右側支點Y。后制動蹄7被張開以后,順時針旋轉繼而通過自調螺桿推動前制動蹄10繞支點X形成制動力矩。很顯然,此時制動器變成了“帶滑動支座的自增力式結構”,后制動蹄7為第一蹄,前制動蹄10為第二蹄,支點X是最終承力點。
2 駐車制動器效能因數計算
2.1 駐車拉臂及增力臂的各杠桿力系分析計算
如圖2,駐車制動時,駐車拉索在駐車拉臂的A點施加力F1,則拉臂在C點施加給旋轉銷8力F5′,同時在C點受到旋轉銷的反作用力F5,F5=F5′= (L1/L2)F1=4.658F1。拉臂施加給自調螺桿的力 F2=F1+F5=5.658F1。F5′成為增力臂的促動力,使增力臂在E點產生施加給增力推桿的推力F4,同時增力臂在E點受到增力推桿的反作用力F4′,F4= F4′=(L3/L4)F5′=0.772F5′=3.598 F1。D 點輸入 F3=F4′+F5′=10.028 F1。
2.2 上坡駐車時的效能因數計算
2.2.1 上坡時第一蹄的效能因數
如圖 3,上坡時制動鼓逆時針旋轉,第一蹄是“平行滑動支座式領蹄”,促動力為 F4,輸出力為 Fd1,效能因數計算公式相關文獻已有詳細說明。其效能因數:
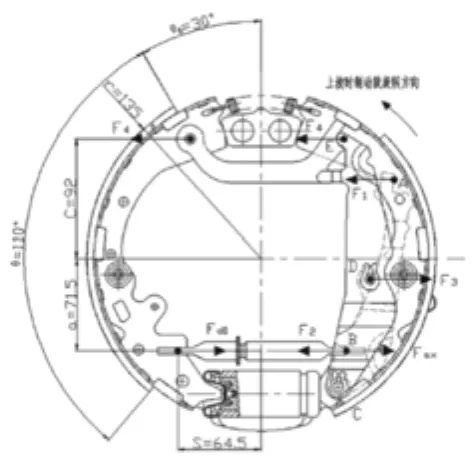
圖3 上坡時第一蹄的受力分析(圖中左側那個蹄)

式中:

μ—制動襯片的摩擦系數,與行車制動摩擦片一樣,本例中μ=0.35;
μs-制動蹄筋和自調螺桿間的摩擦系數,鋼對鋼為 0.2-0.3,本例取μs=0.25;
c—制動力作用點到中心的距離,mm;
a—中心到滑動支座的距離,mm;
s—中心到滑動平面的距離,mm;
r—制動鼓半徑,mm;
θ—制動襯片包角,角度(°);
θ′—制動襯片包角的弧度值,弧度rad,θ′=θ×π/180°。
代入,得BF1=1.832,也即:

Fd1為第一蹄等效到制動鼓半徑上的摩擦力。
所以,Fd1=1.832F4=1.832×3.598 F1=6.59F1,為了便于疊加,全部以F1作為基準來計算效能因數。相對于F1來說,第一蹄的實際效能因數BF1′=6.59。
2.2.2 上坡時第二蹄的效能因數
如圖4,第二蹄是“斜面滑動支座式領蹄”,它受到兩個促動力,一個是自調螺桿的力 Fax(實際是其分力 F5,詳見下面(1)中的論述),一個是增力臂固定銷的力F3,兩者產生的效能因數疊加,成為第二蹄的總效能因數,下面分別計算。
(1)自調螺桿的力Fax產生的效能因數。根據相關文獻可知:

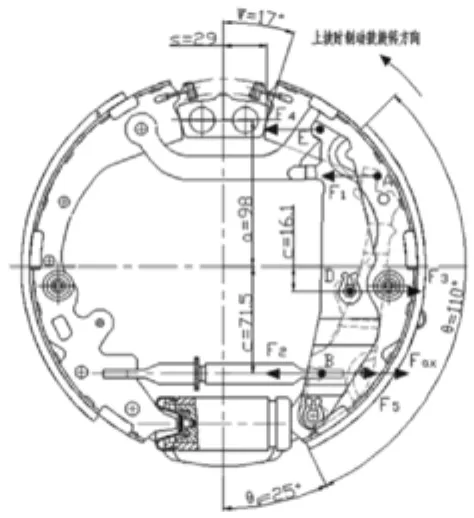
圖4 上坡時第二蹄的受力分析(圖中右側那個蹄)
如圖4,第二蹄是“斜面滑動支座式領蹄”,其初始效能因數的計算公式同式(1),式中c=71.5,a=98,其它各參數值按圖 4計算。其中μs用μs′代替(因支持銷有斜度),μs′=μs+tanΨ=0.25+tan17°=0.556。代入計算得:
BF2初始=1.233,即 Fd2=1.233F5,則 Fd2=1.233×11.415F1=14.075F1,所以,第二蹄因自調螺桿產生的實際效能因數BF2螺桿=14.075。
(2)增力臂固定銷的力F3產生的效能因數
如圖4,第二蹄是“斜面滑動支座式領蹄”,其效能因數計算公式同式(1),只是針對F3計算效能因數時,式中c=16.1,a=98,其它各參數值按圖 4計算。其中μs用μs′代替,μs′=μs+tanΨ=0.25+tan17°=0.556。代入計算得:
BF2初始=0.802,即 Fd2=0.802F3,則 Fd2=0.802×10.028 F1=8.042F1,所以,第二蹄因自調螺桿產生的實際效能因數BF2固定銷=8.042。
(3)第二蹄的總效能因數
BF2′= BF2螺桿+ BF2固定銷=14.075+8.042=22.117。
2.2.3 上坡時總的效能因數
BF總=BF1′+ BF2′=6.59+22.117=28.707。
2.3 下坡駐車時效能因數計算
2.3.1 下坡時第一蹄的效能因數
如圖 5,下坡時制動鼓順時針旋轉,第一蹄是“平行滑動支座式領蹄”,它受到的促動力是D點的F3,因為F3處于中心線的下方,所以C值應取負值,BF1的計算公式同式(1)。各參數見圖5,代入得BF1= 0.754,即Fd1=0.754F3=0.754×10.028F1=7.561F1,相對于 F1來說,第一蹄的實際效能因數BF1′=7.561。
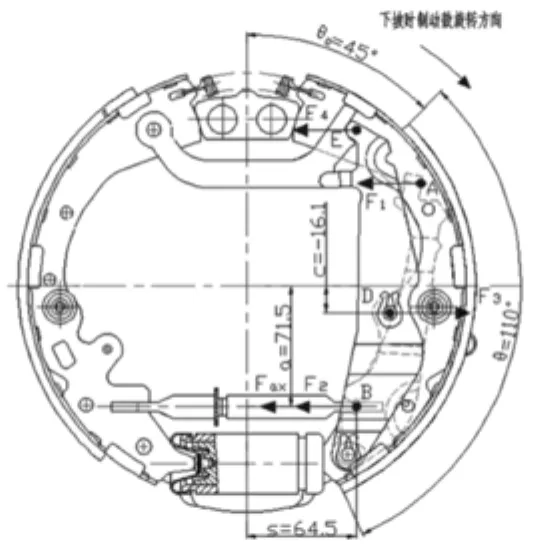
圖5 下坡時第一蹄的受力分析(圖中右側那個蹄)
2.3.2 下坡時第二蹄的效能因數
如圖6,第二蹄是“斜面滑動支座式領蹄”,它受到的促動力是自調螺桿的推力F6,F6是兩個力的合力,一個來是蹄筋的增力Fax,另一個是駐車拉臂的力F2。
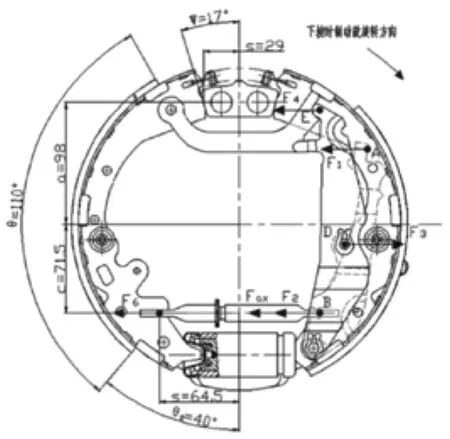
圖6 下坡時第二蹄的受力分析(圖中左側那個蹄)
根據相關文獻,類同(8)我們得式(9)

其中 c、a值見圖 5,c=-16.1,a=71.5,代入得 Fax=1.198F3=1.198×10.028F1=12.009F1。則 F6=Fax+F2=12.009 F1+5.658F1=17.667F1。下面計算由其產生的效能因數。
如圖6,第二蹄是“斜面滑動支座式領蹄”,其初始效能因數的計算公式同式(1),式中c=71.5,a=98,其它各參數值按圖 6計算。其中μs用μs′代替,μs′=μs+tanΨ=0.25+tan17°=0.556。代入計算得:BF2=1.247,即 Fd2=1.247F6=1.247×17.667F1=22.031F1,相對于F1來說,第二蹄的實際效能因數 BF2′=22.031。
2.3.3 下坡時總的效能因數
BF總=BF1′+ BF2′=7.561+22.031=29.592。
3 結構設計要點(所有參數均在圖2中標出)
3.1 增力臂E點的初始位置
駐車時能轉換為自增力結構的關鍵是能將兩個蹄中的一個脫離支撐塊,這樣第一蹄的增力(制動鼓的摩擦力旋轉制動蹄形成增力)才能通過自調螺桿傳遞給第二蹄。實現方法是:增力臂一旦開始動作,這個動作就能立即傳遞給增力推桿,增力推桿立即將一個蹄推離支撐塊。所以增力臂E點的初始位置,應該使增力臂與增力推桿為零間隙或小間隙。
3.2 旋轉銷8的初始位置
對旋轉銷的初始位置有兩個要求,一是在駐車時,旋轉銷旋轉時不能與蹄筋干涉,要有足夠的旋轉空間(這個旋轉位移大),二是行車制動時,當蹄筋被分泵張開時,蹄筋不能與旋轉銷干涉(這個旋轉位移小)。所以,旋轉銷應處于腰形孔中間偏M方向,一般N=2~3M。
3.3 蹄筋上的腰形孔尺寸及走向
(1)尺寸。在保證蹄筋有足夠強度的前提下,腰形孔越大越好。但因為蹄筋(腰形孔的基體)在此處受空間限制不會太大,所以腰形孔尺寸的設計上限是:蹄筋被掏出一個腰形孔后,在行車制動時仍應有足夠的強度和剛度;設計下限是:為避免行車及駐車制動時蹄筋與旋轉銷干涉,腰形孔應該足夠大;(2)走向。腰形走向要沿著制動時旋轉銷的位移軌跡。
3.4 拉臂的初始位置
從計算過程可以看出,拉臂、蹄筋始終是同時和自調螺桿受力點B接觸的,所以拉臂初始位置應滿足的條件是:當拉臂和蹄筋同時與自調螺桿接觸時,拉臂尾部與蹄片內圓弧仍有間隙。否則,拉臂會將自調螺桿頂起脫離蹄筋,這時螺桿上受到的力就無法傳遞給蹄筋。
3.5 拉臂(及增力臂)外邊緣與蹄片內圓弧的間隙J
間隙J應足夠大,應滿足的條件是:在制動狀態時,拉臂及增力臂(此時已產生旋轉位移)仍然與蹄片內圓弧有間隙。若兩者發生干涉,拉臂的力就無法通過杠桿機構傳遞給增力推桿,制動蹄就無法被推離支撐塊,制動器就不是自增力結構了。
3.6 增力臂與增力推桿接觸部位的表面質量
接觸部位表面應光滑平整,這樣增力臂的力才能有效傳遞給增力推桿,若接觸面有斜角,則分力會比較大,力和行程的效率損失大。如果用沖裁工藝成型,則光亮帶應在70%以上。
3.7 推桿固定銷中心H點和圓弧鉸鏈中心E點的關系
兩者應處于同一水平線上,目的是使E點傳遞的力全部傳遞給H點,如果不在同一水平線上,就會有分力。
3.8 杠桿系應有足夠的剛度
因為該結構復雜而緊湊,旋轉銷的行程比較小(受空間限制)。若杠桿系剛度不足,其受力時會發生較大的彈性變形,就會消耗一部分旋轉銷的行程。所以拉臂、增力臂、增力推桿均應有足夠的剛度。
4 臺架試驗和整車駐坡試驗對上述設計計算的驗證
該款車制動器的開發過程,也驗證了上述計算分析的正確性。開發經歷了兩個階段,臺架試驗和整車試驗結果具有對應性。
4.1 階段一:剛開發時未充分考慮到各設計要點,結果如下:
(1)制動器臺架試驗效能因數低,只能達到領從蹄結構的水平。詳見表1。
(2)整車坡道駐車試驗,滿載無法駐18%的坡道。
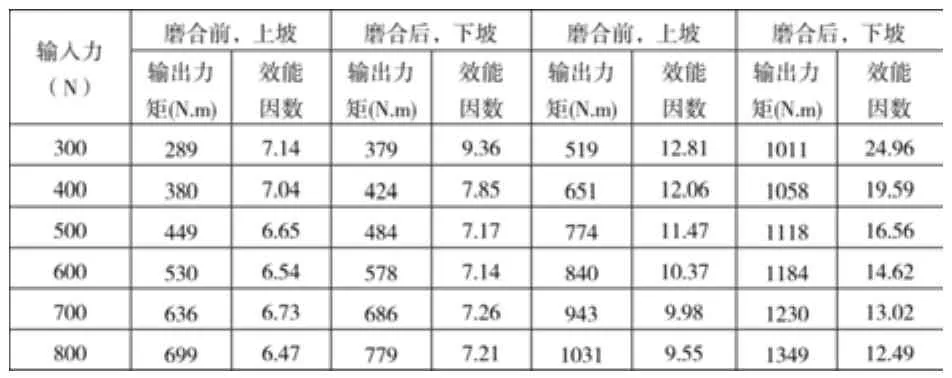
表1 階段一的制動器臺架試驗實測力矩及效能因數
4.2 階段二:考慮設計要點中的所有要素,對結構進行設計優化,優化后結果如下:
(1)制動器臺架試驗效能因數達到了雙向自增力結構的效能因數。
(2)整車坡道駐車試驗,滿載可以駐30%的坡道。
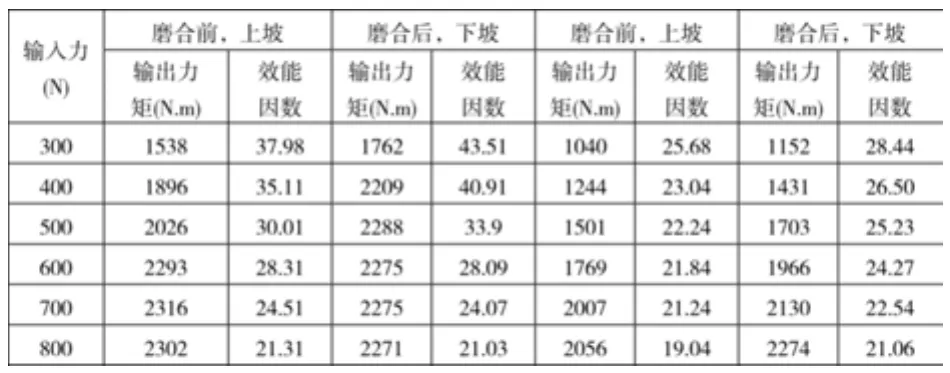
表2 階段二的制動器臺架試驗實測力矩及效能因數
5 總結
綜上所述,本文通過一則實例,分析了一種行車和駐車變結構形式的鼓式制動器,明確給出其力矩計算方法和設計要點,最后通過臺架試驗和整車駐坡試驗進行驗證。驗證結果表明計算方法正確,設計要點考慮充分。當后輪制動器采用領從蹄鼓式制動器時,如果想在不增大制動器半徑的前提下提高駐車制動效能,可以考慮使用這種結構。
[1] 劉惟信,汽車設計 [M] 北京: 清華大學出版社 2001,693-698.
[2] L.魯道夫,汽車制動系統的分析與設計 [M] 張蔚林、陳名智 譯機械工業出版社 1985,18-34.
[3] 方泳龍,汽車制動理論與設計 [M] 國防工業出版社 2005,58-65.
The design and calculation of a kind of drum brake whose structure is different when service brake and parking brake
Cui Xiangbo, Li Bin
( Chery automobile co., LTD Chassis technology research institute Anhui Wuhu 241006 )
The feature of leading-trailing shoe brake is high stability efficiency factor but low efficiency factor; the feature of bi-directional servo brake is low stability efficiency factor but high stability efficiency factor. If we can design a kind of brake, which is leading-trailing shoe brake when service brake, use of the advantage of its high stability efficiency factor;and which is bi-directional servo brake when parking brake, use of the advantage of its high efficiency factor. It will be a kind of brake with great application value. Through an example, the paper give the method of efficiency factor calculation and the key points of design of this kind of brake.
leading-trailing shoe brake; bi-directional servo brake; Variable structure brake; service brake;parking brake
CLC NO.: U463.51+1 Document Code: A Article ID: 1671-7988 (2017)12-09-05
U463.51+1 文獻標識碼:A 文章編號:1671-7988 (2017)12-09-05
10.16638/j.cnki.1671-7988.2017.12.004
崔祥波(1977-),男,工程師,就職于奇瑞汽車股份有限公司/汽車工程研發總院/底盤技術研究院。從事汽車制動系統的產品設計工作。
