某純電動微卡滑行阻力異常分析與改進(jìn)
2018-01-09 07:27:46劉雪冰李文杰
汽車實(shí)用技術(shù) 2017年12期
關(guān)鍵詞:優(yōu)化
劉雪冰,李文杰
(安徽江淮汽車集團(tuán)股份有限公司,安徽 合肥 230601)
某純電動微卡滑行阻力異常分析與改進(jìn)
劉雪冰,李文杰
(安徽江淮汽車集團(tuán)股份有限公司,安徽 合肥 230601)
對某純電動微卡進(jìn)行滑行阻力分析,確定滑行阻力異常的原因,并針對該原因提出電機(jī)控制軟件優(yōu)化的方案,進(jìn)一步利用電機(jī)臺架試驗(yàn)驗(yàn)證該方案的可行性,最后的整車滑行試驗(yàn)結(jié)果表明優(yōu)化方案有效,改善了整車性能。
滑行試驗(yàn);受力分析;電磁轉(zhuǎn)矩;軟件優(yōu)化
引言
在純電動汽車開發(fā)階段,多數(shù)是用試驗(yàn)室試驗(yàn)代替道路試驗(yàn),底盤測功機(jī)是整車進(jìn)行性能檢測的主要設(shè)備,用轉(zhuǎn)轂代替路面,通過功率加載裝置給轉(zhuǎn)轂施加負(fù)載,模擬整車在道路上行駛的阻力[1,2]。而完成整車動力性、經(jīng)濟(jì)性等室內(nèi)試驗(yàn)的首要條件,就是在轉(zhuǎn)轂臺架上正確模擬出車輛道路行駛阻力,道路行駛阻力的模擬精度將直接影響整車性能試驗(yàn)結(jié)果的準(zhǔn)確度。目前,國內(nèi)很多車企都選擇采用滑行試驗(yàn)測算整車的行駛阻力,并應(yīng)用到轉(zhuǎn)轂臺架進(jìn)行動力性、經(jīng)濟(jì)性的試驗(yàn),同時(shí)滑行阻力測定完成后還可以結(jié)合相關(guān)仿真軟件,更為準(zhǔn)確的分析動力性經(jīng)濟(jì)性的優(yōu)化方案。
1 問題現(xiàn)狀
某純電動微卡設(shè)計(jì)最高車速為80km/h,在定遠(yuǎn)試驗(yàn)場平坦路段做滑行阻力試驗(yàn)時(shí),出現(xiàn)滑行阻力異常現(xiàn)象,如圖 1所示,速度大于 40km/h后,阻力較小,出現(xiàn)阻力凹陷,滑行阻力數(shù)據(jù)如表1所示。

表1 某純電動微卡滑行阻力數(shù)據(jù)(改進(jìn)前)
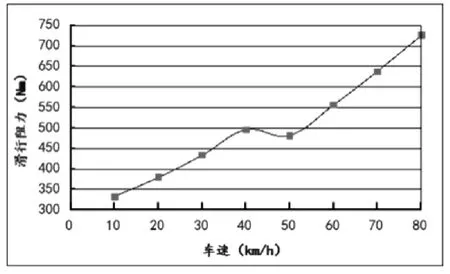
圖1 某純電動微卡滑行阻力曲線(改進(jìn)前)
2 阻力異常原因分析
2.1 試驗(yàn)工況
根據(jù)標(biāo)準(zhǔn)GB/T 12536-1990《汽車滑行試驗(yàn)方法》和GB/T 18385-2005《電動汽車動力性能試驗(yàn)方法》中的要求進(jìn)行電動汽車道路試驗(yàn)[3]。
標(biāo)準(zhǔn)中要求試驗(yàn)在清潔、干燥、平坦、用混凝土或?yàn)r青鋪成的直線道路上進(jìn)行,道路寬度大于 8m,縱向坡度不大于0.1%,風(fēng)速不大于3m/s,氣溫在5℃~32℃之間,相對濕度不大于95%[4]。以車載GPS及數(shù)據(jù)采集器測量記錄車速、距離及時(shí)間。表2為實(shí)際試驗(yàn)時(shí)的試驗(yàn)條件。

表2 滑行試驗(yàn)條件
試驗(yàn)條件滿足標(biāo)準(zhǔn)要求,試驗(yàn)測試設(shè)備在檢定有效期內(nèi),左右輪胎氣壓正常,基本排除外因?qū)е禄凶枇Ξ惓!?/p>
2.2 整車滑行受力分析
汽車在路面上行駛時(shí),根據(jù)動力學(xué)的平衡關(guān)系建立汽車行駛平衡方程式為[5]:

式(1)中:Ft為整車驅(qū)動力,F(xiàn)f為滾動阻力,F(xiàn)w為空氣阻力,F(xiàn)i為坡度阻力,
車輛在平直干燥路面上空檔滑行時(shí),坡道阻力為0N,理論上整車驅(qū)動力為0N,整車的滑行阻力即為滾動阻力和空氣阻力之和。
純電動汽車的車輛驅(qū)動力完全來自于電機(jī)的扭矩輸出,而電機(jī)的扭矩輸出主要依賴于整車控制器扭矩指令和電機(jī)控制器的控制。通過觀察表1中該款純電動微卡的滑行數(shù)據(jù),可見在 50km/h及以上車速時(shí),滑行阻力出現(xiàn)異常,而電機(jī)控制器軟件中設(shè)定:在司機(jī)松掉油門進(jìn)入滑行狀態(tài)后(整車控制器的扭矩指令為0Nm),電機(jī)控制器的功率模塊(IGBT)停止運(yùn)行的電機(jī)轉(zhuǎn)速為 3800rpm,3800rpm按照整車主減速比4.875、減速器減速比1.98及輪胎半徑0.297m換算對應(yīng)車速為45km/h,推測電機(jī)控制器IGBT運(yùn)行后電機(jī)輸出扭矩不為0Nm。
設(shè)定滑行阻力方向?yàn)檎较颍瑒t電機(jī)驅(qū)動力方向?yàn)樨?fù)方向。當(dāng)電機(jī)輸出扭矩為0Nm時(shí),整車滑行阻力僅滾動阻力和空氣阻力,即式(2):

當(dāng)電機(jī)輸出扭矩非0 Nm時(shí),則整車的滑行阻力如式(3):

令式(3)與式(2)相減,得式(4):

Fzu2為考慮電機(jī)控制器 IGBT運(yùn)行后電機(jī)存在驅(qū)動力的滑行阻力,F(xiàn)zu1為未考慮電機(jī)控制器 IGBT運(yùn)行后電機(jī)存在驅(qū)動力的滑行阻力,從式(4)可見,若電機(jī)控制器IGBT運(yùn)行后若電機(jī)輸出驅(qū)動力,會導(dǎo)致滑行阻力偏小,出現(xiàn)阻力拐點(diǎn)。
為了進(jìn)一步驗(yàn)證以上判斷,對電機(jī)系統(tǒng)進(jìn)行臺架對拖試驗(yàn),由原動機(jī)帶動電機(jī)從0rpm至最高車速7200rpm空載運(yùn)行,觀察電機(jī)控制器直流測電流,可見從3800rpm電機(jī)控制器IGBT運(yùn)行后,電機(jī)控制器直流側(cè)電流從0A升至2A,說明電機(jī)此時(shí)并非完全空載,存在功率輸出,從而導(dǎo)致電機(jī)軸上有扭矩輸出,如圖2、圖3所示。
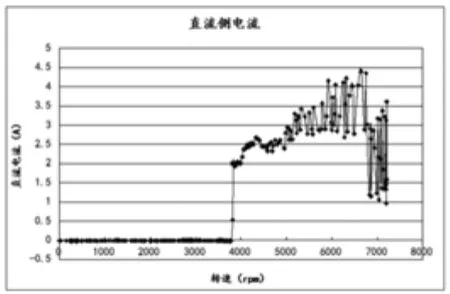
圖2 電機(jī)控制器直流側(cè)電流(改進(jìn)前)

圖3 電機(jī)軸上輸出扭矩(改進(jìn)前)
3 電機(jī)控制軟件優(yōu)化

圖4 電機(jī)控制軟件框圖
如圖4所示,在電動汽車整車環(huán)境中,電機(jī)控制器與整車控制器通過 CAN通訊交互,整車滑行時(shí),司機(jī)掛空檔,整車控制器下發(fā)給電機(jī)控制器的扭矩指令為0Nm,電機(jī)控制器通過解析模塊獲取控制目標(biāo)扭矩0Nm,調(diào)節(jié)電壓逐漸達(dá)到目標(biāo)扭矩值,電機(jī)電磁轉(zhuǎn)矩公式[6,7]如式(5):

觀察電機(jī)電磁轉(zhuǎn)矩公式(5),可知在整車需求扭矩為0Nm時(shí),存在以下兩種情況會造成扭矩非0 Nm:
● 電機(jī)轉(zhuǎn)子位置存在誤差,造成iq給定(即圖4中iq*)雖然為0A,但是電機(jī)控制的真實(shí)iq(即圖4中iq)不為0A,導(dǎo)致輸出轉(zhuǎn)矩非0Nm。
● iq給定(即圖4中iq*)不為0A,造成轉(zhuǎn)矩非0Nm。
對于第一種情況,重新對電機(jī)的初始位置進(jìn)行辨識,標(biāo)定電機(jī)旋變位置,標(biāo)定之前為2445,重新標(biāo)定后初始位置為2465,電機(jī)的轉(zhuǎn)子位置偏差5.5%,并對電機(jī)控制軟件中的變量進(jìn)行相應(yīng)修正。
對于第二種情況,電機(jī)控制器IGBT運(yùn)行后,將電機(jī)控制的iq給定電流(圖4中的iq*)通過CAN通訊上傳至上位機(jī)界面,實(shí)際觀察iq給定(即圖4中iq*)確實(shí)存在一定小電流,進(jìn)一步對電機(jī)控制軟件中各轉(zhuǎn)速下的零扭矩iq給定電流(即圖4中iq*)設(shè)定為0A,即iq*n(T=0)= 0A(n=200rpm,400rpm……7200rpm),T代表扭矩。
4 試驗(yàn)驗(yàn)證
電機(jī)控制軟件優(yōu)化后,再次對電驅(qū)動系統(tǒng)進(jìn)行臺架測試,由原動機(jī)帶動被測試電機(jī)轉(zhuǎn)動,上位機(jī)給定扭矩為0Nm,對比軟件優(yōu)化前后輸出扭矩和直流側(cè)電流大小如圖4和圖5所示。
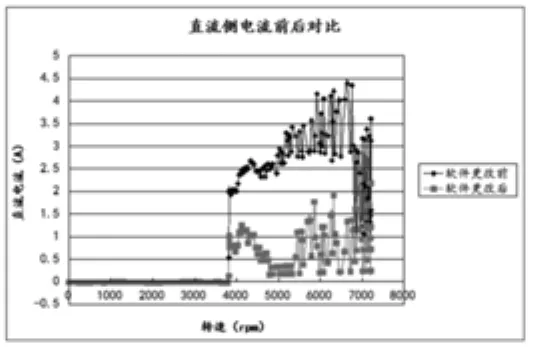
圖4 軟件優(yōu)化前后電機(jī)控制器直流側(cè)電流對比

圖5 軟件優(yōu)化前后電機(jī)軸上輸出扭矩對比
通過對比以上兩圖可見,對電機(jī)控制器的軟件優(yōu)化后,0Nm要求扭矩下,電機(jī)控制器輸出扭矩控制在1Nm偏差范圍內(nèi),而軟件優(yōu)化之前,0Nm的扭矩偏差最高超過2.5Nm,充分說明了電機(jī)軟件優(yōu)化的有效性。
進(jìn)一步按照標(biāo)準(zhǔn)對整車進(jìn)行滑行試驗(yàn),實(shí)測整車的滑行阻力如表3所示。
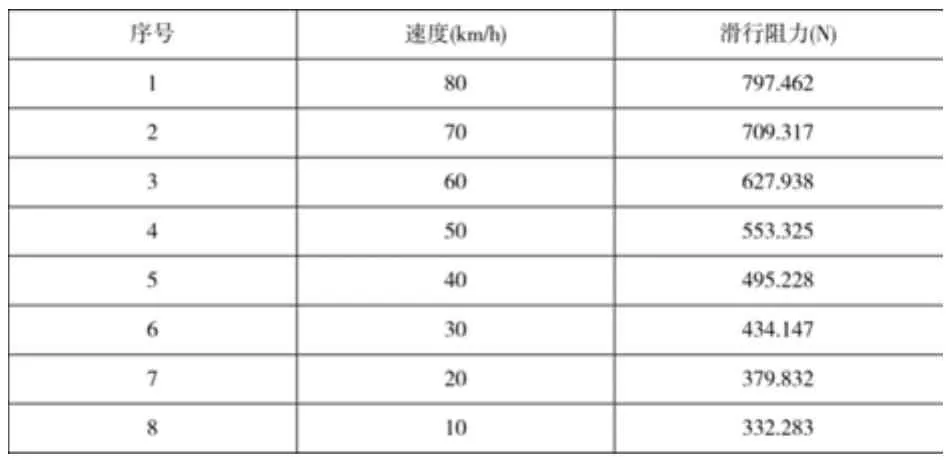
表3 某純電動微卡滑行阻力數(shù)據(jù)(改進(jìn)后)

圖6 某純電動微卡滑行阻力曲線(改進(jìn)后)
從圖6可見,整個(gè)速度段滑行阻力曲線平滑,無拐點(diǎn)出現(xiàn),有利于整車轉(zhuǎn)轂試驗(yàn)。
5 結(jié)論
通過對某電動微卡的平路滑行進(jìn)行受力分析,及對電機(jī)驅(qū)動系統(tǒng)進(jìn)行臺架試驗(yàn),確定了滑行阻力異常的原因,根據(jù)電機(jī)控制原理對電機(jī)控制軟件進(jìn)行兩方面優(yōu)化,通過電機(jī)系統(tǒng)臺架試驗(yàn)和整車滑行試驗(yàn)驗(yàn)證,改善了整車滑行阻力異常的問題。
[1] 朱偉偉,陳剛.基于滑行試驗(yàn)的載貨汽車動力性經(jīng)濟(jì)性仿真與試驗(yàn)分析[J].汽車科技,2015,4:20-24.
[2] 王佳,楊建中,蔡志標(biāo),等.基于模糊控制的純電動轎車整車優(yōu)化控制策略[J].汽車工程,2009,31(4):362-365.
[3] 周榮寬,韓曉東,韓宗奇等.基于道路試驗(yàn)的電動汽車滑行阻力系數(shù)分析[J].汽車技術(shù),2015,4:52-55.
[4] 王德倫,周榮寬.ISG輕度混合動力電動汽車控制策略的制定及仿真[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)).2013.27(6):5-9.
[5] 董勁松,許洪國,任有等.基于道路試驗(yàn)的汽車滾動阻力和空氣阻力系數(shù)計(jì)算方法研究[J].交通信息與安全,2009,1(27):75-78.
[6] R.Krishnan,柴鳳等譯.永磁無刷電機(jī)及其驅(qū)動技術(shù)[M].北京:機(jī)械工業(yè)出版社,2012:227-231.
[7] 王成元,夏家寬,孫宜標(biāo).現(xiàn)代電機(jī)控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2009:104-105.
Analysis and Improvement of Sliding Resistance of a Pure Electric Micro Card
Liu Xuebing, Li Wenjie
( Anhui Jianghuai Automobile Group Co., Ltd., Anhui Hefei 230601 )
By analyzing the sliding resistance of a pure electric micro card, this paper determines the cause of the abnormal sliding resistance.And a optimization scheme of the motor control software is proposed for this reason.The motor bench test is used to verify the feasibility of the scheme.The final vehicle sliding test results show that the optimization program is effective and improve the performance.
Sliding test; Force analysis; Electromagnetic torque; Software optimization
CLC NO.: U469.7 Document Code: A Article ID: 1671-7988 (2017)12-160-03
U469.7 文獻(xiàn)標(biāo)識碼:A 文章編號:1671-7988 (2017)12-160-03
10.16638/j.cnki.1671-7988.2017.12.053
劉雪冰(1988- ),電驅(qū)動工程師,就職于安徽江淮汽車集團(tuán)股份有限公司技術(shù)中心。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
