基于區間重合度的雷達與ESM航跡關聯算法
2018-01-09 00:43:32
雷達科學與技術 2017年1期
關鍵詞:關聯
(海軍航空工程學院電子信息工程系,山東煙臺264001)
基于區間重合度的雷達與ESM航跡關聯算法
關 欣,彭彬彬,衣 曉
(海軍航空工程學院電子信息工程系,山東煙臺264001)
針對時變系統誤差的情況,提出了一種基于區間重合度的雷達與電子支援措施(ESM)航跡關聯算法。分析了時變系統誤差對雷達與ESM測量數據的影響,將時變系統誤差下航跡的不確定性轉化為區間問題,通過區間的重合度來衡量雷達與ESM航跡關聯程度,建立了灰色關聯分析模型,實現了無需系統誤差配準下的雷達與ESM航跡關聯。在不同誤差下進行了仿真對比,仿真結果表明,該算法能有效地實現時變系統誤差下的雷達與ESM航跡關聯,具有良好的魯棒性。
航跡關聯;雷達;電子支援措施;系統誤差;區間重合度
0 引言
在多傳感器信息融合領域,航跡關聯一直是相當重要且棘手的問題。近年來,由于電子情報系統在軍事領域發揮著越來越大的作用,異類傳感器的航跡關聯日益成為國內外研究的熱點。作為當前使用最廣泛的兩種傳感器,雷達與ESM的航跡關聯是典型的異類傳感器航跡關聯問題[1]。文獻[2-4]研究基于統計理論的雷達與ESM航跡關聯算法,通常是通過量測構造統計量,然后依據門限進行關聯判決。這種方法限制條件少,算法的適用能力較好,但關聯性能仍需調高。文獻[5]對統計理論方法進行拓展,提出了基于模糊綜合評判的雷達與ESM航跡關聯算法,減少了部分計算量。為了更充分地利用雷達與ESM的信息,文獻[6]基于極大似然估計提出了一種直角坐標系下雷達與ESM航跡關聯方法,并分析了正確和錯誤關聯概率的表達式,文獻[7]簡化了這一表達式。文獻[8]研究了有偏估計下雷達與ESM航跡關聯的問題,分析了有偏估計對統計量的影響。由于ESM只有角度信息,為了確保濾波不發散,要求ESM傳感器相對目標進行一定的機動[9]。文獻[10]在修正極坐標系下構造了不同的關聯統計量,分析了各種參數對關聯方法的影響。文獻[11]在修正極坐標系的前三個狀態向量的基礎上,增加了兩個新的狀態量,提高了航跡關聯性能。但是上述文獻均未考慮系統誤差的影響。
文獻[12]對系統誤差下雷達與ESM航跡關聯進行了研究,發現存在系統誤差時,傳統的統計方法構造的統計量不再服從標準的卡方分布,而是服從非中心卡方分布。文獻[13]仍用統計的思路處理系統誤差下雷達與ESM航跡關聯問題,由于系統誤差是未知的,無法獲知確切門限,并未提出有效的解決方法。上述文獻為分析簡便,將系統誤差描述為恒定不變的常量,而未對時變系統誤差下的情況進行討論[14-15]。本文首先分析了時變系統誤差對雷達與ESM測量數據的影響,然后基于灰色系統理論,將時變系統誤差下的不確定性問題,轉化為區間數的確定問題,避免了統計方法無法確定門限及誤差積累的問題,仿真表明本文方法能有效地解決時變系統誤差下的雷達與ESM航跡關聯問題。
1 時變系統誤差下雷達與ESM的區間描述
假設二維情況下,位于同一平臺的雷達與ESM共同對目標進行定位跟蹤,k時刻的位置為(x s(k),y s(k)),目標的位置為(x t(k),y t(k))。雷達在k時刻量測由距離和方位角共同組成,且該量測同時受到時變系統誤差和隨機量測噪聲影響,則

ΔηA(k)雖然是隨時間變化的。但是在實際工程中,傳感器的系統誤差是有范圍的,若超出一定的范圍,則該數據是不可信的,不能用于實際當中的。因此,不妨假設雷達允許的最大系統誤差為(本文假設傳感器最大系統誤差大于零),最小系統誤差均為零。
同理,ESM在k時刻的量測

式中,θB(k)為目標相對于ESM的真實方位角,ΔθB(k)為ESM時變的測角系統誤差,ESM測角誤差εB(k)服從具有零均值、恒定方差的高斯分布。不妨假設ESM測角系統誤差最大為最小為零。
對雷達與ESM分別進行跟蹤,濾波效果良好時可忽略隨機誤差,k時刻得到的估計為得到ESM角度估計為由于系統誤差的時變特性,目標的真實位置是無法獲知的。但是當知道系統誤差的變化范圍后,真實目標可能存在的區域成為不確定區域,如圖1所示。
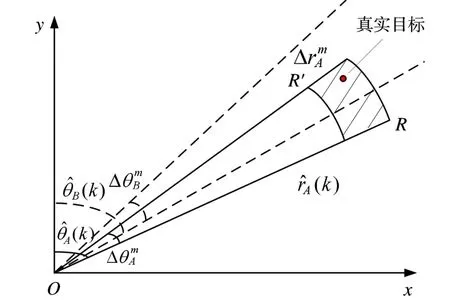
圖1 系統誤差下的不確定區域
對于雷達目標而言,真實目標不確定區域是一塊圓環段區域,圖中R為雷達目標的估計位置,R′為根據雷達的最大系統誤差反推得到的最遠的位置,真實目標以極大的概率位于此區域內。對于ESM目標,由于ESM僅有角度信息,只能確定目標位于ESM角度估計和反推的角度之間。可知雖然目標某時刻的具體位置是不確定的,但是目標位置所處的區間幾乎是確定的,這就將不確定問題轉化為確定問題進行分析,接下來對其進行區間描述。
假設k時刻第i個雷達目標的距離不確定區間為,其中


i=1,2,…,n A,n A為雷達探測到目標的個數。由于目標的真實方位范圍可能包含正北方向,即會出現角度值0和2π之間的跳變,所以角度不確定區間代表從順時針到的區間,而并不嚴格要求
同理,對于第j個ESM目標角度不確定區間為,其中

j=1,2,…,n B,n B為ESM探測到目標的個數。
2 基于區間重合度雷達與ESM航跡關聯方法
當雷達目標與ESM目標源于同一個目標時,其真實目標不確定區域極大概率出現重合。換言之,從統計的角度來講,雷達與ESM真實目標不確定區域重合度越大,越有可能是源于同一個目標。對于二維情況同地配置的雷達與ESM,由于ESM沒有距離信息與雷達匹配,所以真實目標不確定區域只考慮角度信息。
一維區間在實數范圍內存在三種關系:相離、相交和包含。相離表示雷達與ESM真實目標不確定區域不存在重合,即雷達與ESM目標極大概率來自于不同目標;相交和包含表示雷達與ESM真實目標不確定區域存在重合,表示雷達與ESM目標可能來自于同一目標,重合度越大,來自于同一目標的可能性越大。令α(I)表示取區間I的長度,k時刻第i個雷達目標和第j個ESM目標角度不確定區間的重合度為
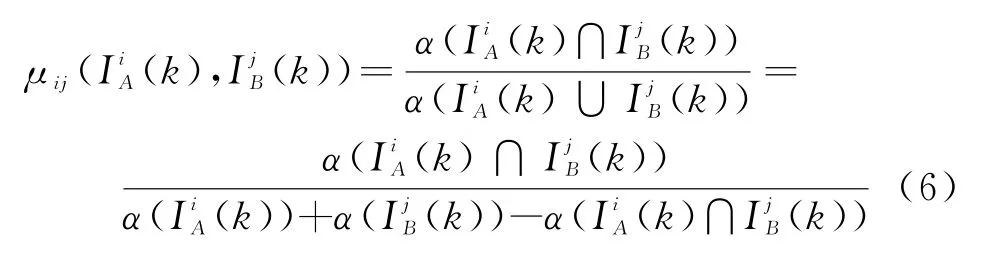
式中,I A∩I B表示區間I A和區間I B的交,I A∪I B表示區間I A和區間I B的并。

表1 α(I iA(k)∩I jB(k))的表達式
ESM屬于無源傳感器,其探測到的目標對應于輻射源,通常某個平臺(對應雷達目標)上載有若干個輻射源,所以進行雷達與ESM航跡關聯時,選取ESM的第j個航跡作為已知模式[16],雷達航跡i作為待識別模式,i=1,2,…,n B,文獻[17]給出了灰關聯四公理,由于本文中來自于同一目標的可能性越大,區間重合度越大,如果按照傳統方法直接將代入關聯系數公式,會導致關聯系數不滿足關聯四公理的接近性。故定義k時刻兩者的關聯系數為

式中,ρ∈[0,1]為分辨系數,一般取0.5。此時,且其值越小,關聯系數越大,滿足關聯四公理。
k時刻ESM航跡j與雷達航跡i的灰關聯度為

為了對雷達航跡與ESM航跡關聯進行判決,對關聯度按遞增排序,采用最大關聯判別原則,即則判斷k時刻雷達航跡i與ESMj航跡關聯。
3 仿真分析
為了驗證本文提出關聯算法的有效性,用本文的算法與傳統統計方法[13]提出的基于角度統計量的算法關聯性能進行仿真對比實驗。仿真中,正確關聯概率為Pc=Nc/(Nc+Nm+Nf),錯誤關聯概率為Pf=Nf/(Nc+Nf+Nm),漏關聯概率為Pm=Nm/(Nc+Nm+Nf),其中Nc,Nf和Nm依次為實驗中正確、錯誤和漏關聯的點跡對的數目,且有Pc+Pf+Pm=1。
假設雷達與ESM位于同一個觀測平臺,平臺初始位置為(0 km,0 km),以π/2的航向和60 m/s的速度勻速直線運動。以(30 km,25 km)與(50 km,45 km)為對角的矩形作為目標存在區域,隨機產生5個勻速目標,目標的初始速度和初始航向分別在50~70 m/s和0~2π內均勻分布[18]。雷達與ESM已實現時間對準且采樣時間均為1 s,允許的漏關聯概率為0.1,雷達測距的隨機誤差和最大系統誤差均為100 m。
3.1 不同系統誤差對算法的影響
條件設置如表2所示,在上述條件下各進行100次蒙特卡洛仿真,選取正確和漏關聯概率作為比較指標,結果如圖2和圖3所示。
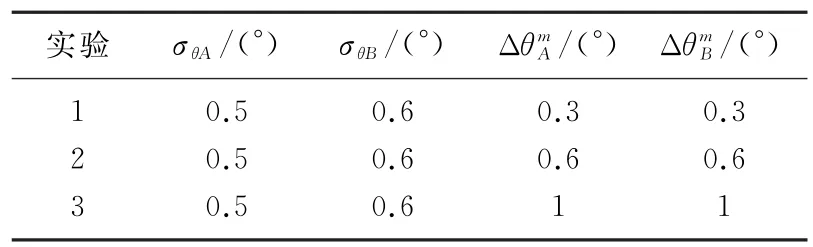
表2 不同系統誤差設置表
圖3為實驗3條件下雷達與ESM關于某個目標的角度估計,在傳統以高斯噪聲或者時不變系統誤差為基礎的文獻[10-13]中,目標的角度估計往往較平滑,而時變系統誤差下,角度估計與真實狀態存在嚴重偏差,且偏差隨著時間變化,這為雷達與ESM航跡關聯增加了難度。
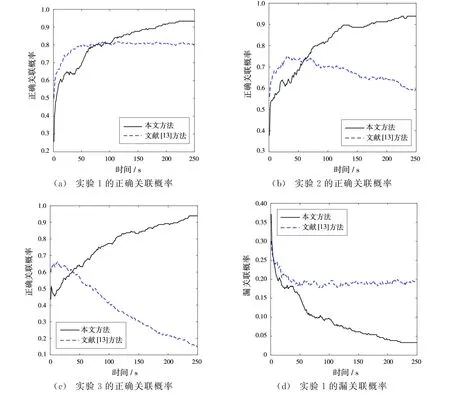
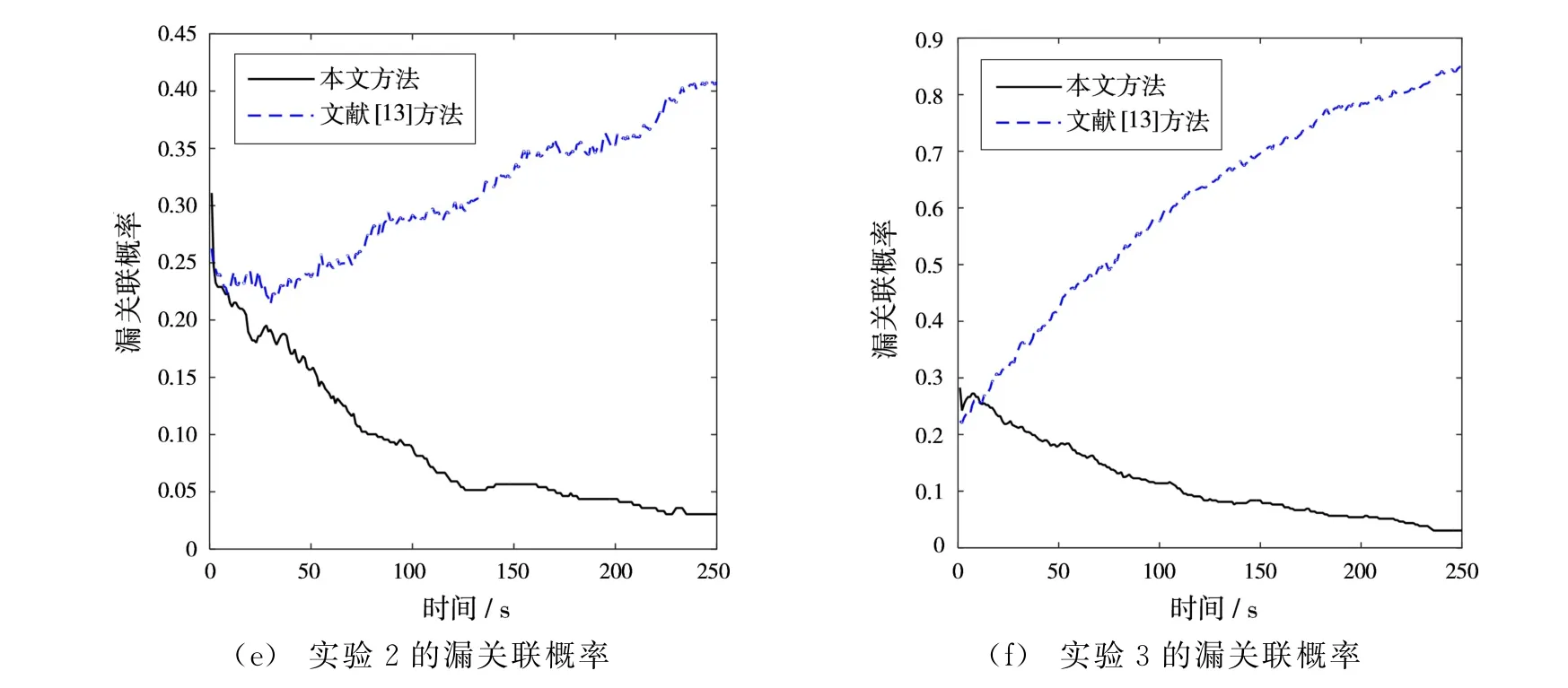
圖2 不同系統誤差下雷達與ESM航跡關聯概率
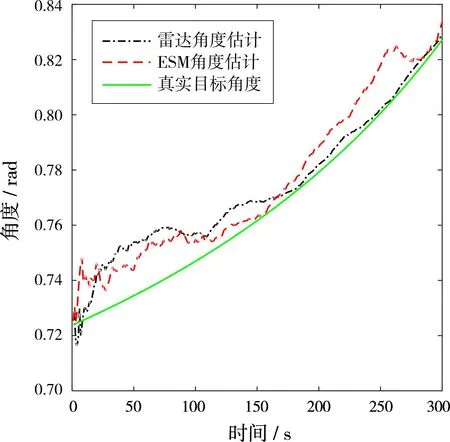
圖3 雷達與ESM關于目標的角度估計
從圖2(a)中可以看出,文獻[13]方法在系統誤差較小時,誤差隨時間累積的效果不明顯,仍表現出較好的關聯性能;但是隨著系統誤差的增大,漏關聯概率增加,正確關聯概率曲線是先升后降的,即隨著時間推進,更多的樣本數不僅沒有增加有用信息,反而導致誤差累積,說明傳統的統計方法不適用于處理時變系統誤差下雷達與ESM航跡關聯問題。從圖2可以看出,不同系統誤差下,本文所提方法能保持較高的正確關聯概率,漏關聯概率始終低于文獻[13]方法,具有良好的魯棒性。
3.2 不同隨機誤差對算法的影響
條件設置如表3所示,在上述條件下各進行100次蒙特卡洛仿真,選取正確和漏關聯概率作為比較指標,結果如圖4所示。

表3 不同隨機誤差設置表


圖4 不同隨機誤差下雷達與ESM航跡關聯概率
從圖4可以看出,文獻[13]方法隨著雷達與ESM的隨機誤差增大,正確關聯概率也增大,這是因為統計的方法無法獲得存在系統誤差下的確切門限,導致判決門限與關聯統計量不相符造成的。當系統誤差的最大值大于隨機誤差時,圖4(a)表明本文方法具有較高的正確關聯概率;隨著隨機誤差的增大,濾波效果下降,可能導致真實目標不位于式(4)和式(5)中的目標不確定區域,從而導致關聯性能略微下降,但是正確關聯概率仍高于80%,優于文獻[13]方法。
4 結束語
本文研究了時變系統誤差下的雷達與ESM航跡關聯問題,提出了一種基于區間重合度的雷達與ESM航跡灰色關聯算法。將航跡的不確定性轉化為區間問題,通過區間的重合度來衡量雷達與ESM航跡關聯程度,并建立了灰色關聯分析模型。用本文方法與傳統的統計方法[13]進行仿真對比,仿真結果表明,隨著系統誤差的增大,文獻[13]方法漏關聯概率迅速增大,正確關聯迅速減小,而本文方法始終維持較高的關聯性能,表現出良好的魯棒性;文獻[13]由于判決門限與關聯統計量不相符,出現了隨著隨機誤差增大,正確關聯概率增大的反常現象,本文方法關聯性能略微下降,仍具有80%以上的正確關聯概率,表明了本文方法的有效性。
[1]何友,王國宏,關欣,等.信息融合理論及應用[M].北京:電子工業出版社,2010:124-146.
[2]趙宗貴,刁聯旺,李君靈,等.信息融合工程實踐—技術與方法[M].北京:國防工業出版社,2014:50-75.
[3]WANG G H,MAO S Y,HE Y.Triple-Threshold Radar to ESM Correlation Algorithm When Each Radar Track Is Specified by Different Number of Meas-urements[J].IEE Proceedings-Radar,Sonar and Navigation,2000,147(4):177-187.
[4]CHEN H,BAR-SHALOM Y.Track Association and Fusion with Heterogeneous Local Trackers[C]∥46th IEEE Conference on Decision and Control,2007:2675-2680.
[5]王國宏,何友.基于模糊綜合和統計假設檢驗的雷達與ESM相關方法[J].系統工程與電子技術,1997(4):13-16.
[6]FARINA A,MIGLIOLI R.Association of Active and Passive Tracks for Airborne Sensors[J].Signal Processing,1998,69(3):209-217.
[7]WANG G H,MAO S Y,HE Y.Analytical Performance Evaluation of Association of Active and Passive Tracks for Airborne Sensors[J].Signal Processing,2003,83(5):973-981.
[8]WANG G H,ZHANG X Y,TAN S C.Effect of Biased Estimation on Radar-to-ESM Track Association[J].Journal of System Engineering and Electronic Techniques,2012,23(2):188-194.
[9]王國宏.利用角度、角度變化率和ITG信息的主被動傳感器數據關聯[J].雷達科學與技術,2003,1(1):39-45.WANG Guohong.Heterogeneous Sensor Data Association by Using Angle,Angle Rate and ITG Information[J].Radar Science and Technology,2003,1(1):39-45.(in Chinese)
[10]SCALA B F L,FARINA A.Choosing a Track Association Method[J].Information Fusion,2002,3(2):119-133.
[11]ZHOU Y F,LI W,LEUNG H.Maximum Likelihood Based ESM/Radar Track Association Algorithm in a New Modified Polar Coordinate[R].Ottawa:Defence Research and Development Canada,2004.
[12]張翔宇,王國宏,李世忠.系統誤差對雷達與ESM航跡關聯的影響[J].火力與指揮控制,2011,36(7):39-41.
[13]宋振宇,張翔宇,張光軼.系統誤差對異地配置的雷達和ESM航跡關聯的影響[J].電光與控制,2014,21(3):42-46.
[14]ZHANG F,ALOIS K.Systematic Error Modeling and Bias Estimation[J].Sensors,2016,16(5):729-829.
[15]衣曉,張懷巍,曹昕瑩,等.基于區間灰數的分布式多目標航跡關聯算法[J].航空學報,2013,34(2):352-360.
[16]衣曉,關欣,何友.分布式多目標跟蹤系統的灰色航跡關聯模型[J].信號處理,2005,21(6):653-655.
[17]劉思峰,黨耀國.灰色系統理論及其應用[M].北京:科學出版社,2010.
[18]龍海鷹,任清安.空管異類傳感器數據融合算法研究[J].雷達科學與技術,2010,8(6):526-531.LONG Haiying,REN Qingan.Research on Data Fusion Algorithm of ATC Heterogeneous Sensors[J].Radar Science and Technology,2010,8(6):526-531.(in Chinese)
Track Association Algorithm of Radar and ESM Based on the Interval Overlap Ratio
GUAN Xin,PENG Binbin,YI Xiao
(Department of Electronic and Information Engineering,Naval Aeronautical and Astronautical University,Yantai264001,China)
Aiming at the situation with time-varied systematic errors,a gray track association algorithm of radar and ESM based on interval overlap ratio is proposed in this paper.The effect of time-varied systematic errors on the measurements of radar and ESM is analyzed and the uncertainty of tracks is turned into an interval problem in the presence of time-varied systematic errors.The correlation is measured by the interval overlap ratio and a gray model is established,which realize the track association of radar and ESM without registration.Simulation is carried out with different errors,and the results show that the proposed method can achieve the track association of radar and ESM effectively and has good robustness.
track association;radar;electronic support measures(ESM);systematic errors;interval overlap ratio
TN957
A
1672-2337(2017)01-0061-07
10.3969/j.issn.1672-2337.2017.01.011
2016-08-11;
2016-09-27
國家自然科學基金(No.61032001);教育部新世紀優秀人才支持計劃(No.NCET-11-0872)

關欣女,1978年生,遼寧錦州人,教授、博士生導師,主要研究方向為多源信息融合、智能信息處理。

彭彬彬男,1991年生,安徽安慶人,碩士,主要研究方向為異類傳感器航跡關聯。E-mail:913140043@qq.com
衣曉男,1977年生,山東棲霞人,教授、博士生導師,主要研究方向為無線傳感器網絡、多源信息融合。per.edu.cn/html/releasepaper/2009/09/33.
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42
