基于ibeacon的室內二階段定位算法研究
2018-01-09 03:22:18劉增里李云昊
重慶理工大學學報(自然科學) 2017年12期
關鍵詞:模型
張 蓮,劉增里,李云昊,陳 玲
(1.重慶理工大學 電氣與電子工程學院, 重慶 400054;2.中國兵器工業第203研究所, 西安 710065)
基于ibeacon的室內二階段定位算法研究
張 蓮1,劉增里1,李云昊1,陳 玲2
(1.重慶理工大學 電氣與電子工程學院, 重慶 400054;2.中國兵器工業第203研究所, 西安 710065)
針對室內定位需求的日益增加,提出了一種基于ibeacon的室內二階段定位算法。在建立傳輸模型時,采用高斯濾波與中值濾波相結合對RSSI值進行優化處理;在坐標定位時分成2階段:第1階段通過極大似然法對未知點坐標進行粗略估計,縮小定位范圍;第2階段先對三角質心算法的加權因子進行改進,再采用改進的加權三角質心定位算法對未知點坐標進行精細定位。實驗結果表明:在實驗室環境下算法的定位精度可達1.22 m,對比一般的加權三角質心算法在定位的精度和穩定性方面都有了較好的提升,平均誤差減少了30%左右。
ibeacon;二階段定位;RSSI;極大似然法;加權三角質心算法
近年來隨著移動互聯網的發展,基于位置服務在各行業中展現出了廣闊的應用前景。GPS在室外定位中得到了廣泛應用,但由于室內環境復雜、GPS信號衰減嚴重,無法實現較為精確的室內定位,而在實際生活中,人們80%的活動時間和空間在室內,人們對于室內定位技術的需求也在不斷增加[1]。目前,應用于室內定位的技術主要有低功耗藍牙、WIFI、超聲波、Zigbee等[2]。2013年9月,蘋果公司發布了基于藍牙4.0的ibeacon技術,該技術憑借其低功耗、低成本、容易實現等特點,成為了目前室內定位研究的熱點[3]。文獻[4]提出了基于ibeacon的加權三環定位算法,定位精度一般;文獻[5]提出了ibeacon的改進型環形定位算法,在定位精度上有了提高,但是前期未對數據進行處理,定位誤差偏大;文獻[1]提出了基于ibeacon的三角質心定位方法,并在前期對數據加入了階段去噪與平滑濾波,定位精度和誤差都得到了一定的改善。本文提出了一種基于ibeacon的二階段定位算法:采用極大似然估計與加權三角質心相結合的方法,并在前期加入去噪和平滑濾波,進一步提高了定位精度和穩定性,減少了定位誤差。
1 RSSI測距原理
本文采用基于接收信號強度RSSI值的測距方法[6],通過藍牙終端接收到ibeacon節點發送的RSSI值,再根據無線信號在室內空間中的傳播模型,最終計算出藍牙終端到ibeacon節點的距離。無線信號的傳輸模型選擇常用的Shadowing模型(即對數距離衰減模型),可以分為路徑衰減和噪聲干擾兩部分,表示為:
PL(d)=PL(d0)+10nlg(d/d0)+X0
(1)
其中:PL(d)和PL(d0)分別表示藍牙終端距離ibeacon節點d和d0處的RSSI值,單位為dBm;d0為參考距離,一般取1 m;n為無線信號衰減因子;X0是遮蔽因子,它是一個均值為零的高斯隨機變量。在藍牙終端距離ibeacon節點1 m處,測得的RSSI值為A=PL(d0=1),而X0均值為0,所以Shadowing模型可以簡化為
RSSI=A-10nlg(d)
(2)
其中,參數A和n由環境決定。當環境一定時,可以通過大量實驗數據擬合得到A和n的值,由此得到無線信號在當前環境的傳輸模型,進而通過藍牙終端接收到的RSSI值反向求取終端到 ibeacon節點的距離。
2 極大似然估計
極大似然法是利用已知參考節點到未知點的距離作為信息來估計未知節點的坐標[6],原理如圖1所示。
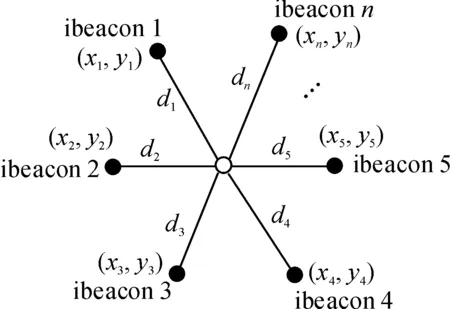
圖1 極大似然法原理
已知n個ibeacon節點的坐標為(x1,y1)、(x2,y2)、(x3,y3)、…、(xn,yn),未知點O(x,y)(藍牙終端)到n個ibeacon節點的距離分別為d1、d2、d3、…、dn,則可以列出n個坐標與距離的方程組:
(3)
將式(3)中的前n-1個方程分別減去第n個方程,可以得到方程組:
(4)
令
(5)
則方程組(4)可以表示為
AX=b
(6)
當n≥3時,根據最小二乘法可得到方程組(6)的最小二乘解,為
(7)
3 加權三角質心算法
在實際環境中,由于噪聲干擾、信號衰減嚴重等情況的發生,一般會使接收到的RSSI值小于實際值,導致換算出來的距離值大于實際值,使得3個圓不會交于一點[7]。實際模型如圖2所示,以O1、O2、O3為圓心的3個圓兩兩相交于3個點A(xA,yA)、B(xB,yB)和C(xC,yC),以A、B、C這3點為頂點的三角形的質心即為未知點。通過對無線信號傳輸模型的分析可以發現,一般的質心算法并沒有反映出不同ibeacon節點對待測點影響力的大小,影響了定位精度。為了減小誤差,采用加權三角質心定位算法,將不同的ibeacon節點與質心坐標間的內在聯系通過權值體現出來[8]。針對圖2采用加權三角質心算法,在加入距離倒數的加權因子后,未知點坐標的計算公式為:
(8)
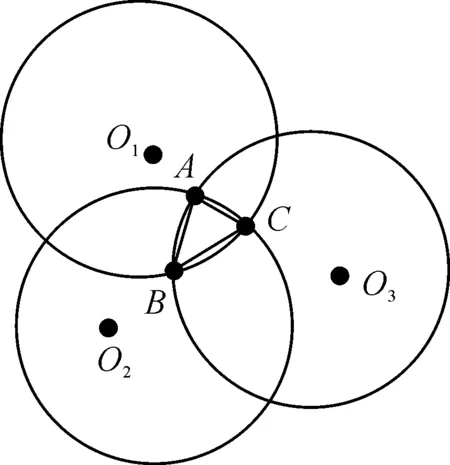
圖2 實際的三角質心定位模型
4 二階段定位算法
本文定位算法分為2個階段:第1階段先采用極大似然法對未知點進行粗略估計,為了減少算法的復雜程度,提高定位的效率,本算法只求取3個最小二乘解,得到3個粗略估計的坐標點;第2階段用改進的加權三角質心算法對3個粗略估計點進行精細定位,進一步提高定位精度。
4.1 第1階段粗略估計

(9)
(10)
(11)
根據式(7),可以得到上述3個方程組的解,分別為
(12)
4.2 權值改進
許多文獻選取的權值都與距離的倒數有關,距離的倒數可以體現ibeacon節點對未知節點的不同影響。考慮到距離值是由測量的RSSI值經過測距模型求得,因此未知節點接收到的來自ibeacon節點的RSSI值也會對坐標定位帶來一定的影響,而且距離越遠對應的RSSI值越小,RSSI值越大時對應的距離越近。本文算法對加權三角質心算法的權值進行改進,將未知節點接收的RSSI值與距離值的倒數一同考慮進來,將未知節點接收到ibeacon節點的RSSI值與對應距離的比值作為權值。
4.3 第2階段精細定位
前面由極大似然估計得到了3個點Z1、Z2、Z3,現對這3個點再采用改進的加權三角質心算法,就能夠對未知點O進行精細定位。而Z1、Z2、Z3點的坐標與集合RSSI1、RSSI2、RSSIn和D1、D2、D3有關系,本文將集合RSSI1、RSSI2、RSSIn和D1、D2、D3中對應元素比值之和的平均值作為加權因子ω1、ω2、ω3,反映出Z1、Z2、Z33個點對質心坐標的不同影響力,進一步提高定位精度,減小誤差。加權因子表示為:
(13)
則未知點O(x,y)通過改進的加權三角質心算法后的坐標可以表示為:
(14)
5 實驗與結果分析
5.1 實驗設計與布置
本次室內定位實驗在12 m×8 m的實驗室環境下進行,實驗室有桌子、椅子以及其他實驗用品,實驗環境較復雜。ibeacon節點平面布置如圖3所示,本次實驗共布置20個ibeacon節點,節點按照均勻對稱方式安裝,相鄰ibeacon節點間相隔2 m,ibeacon節點安裝在離地面1.2 m的平面上。按照圖3中所給坐標系建立實際的平面坐標,20個ibeacon節點的平面坐標如表1所示。
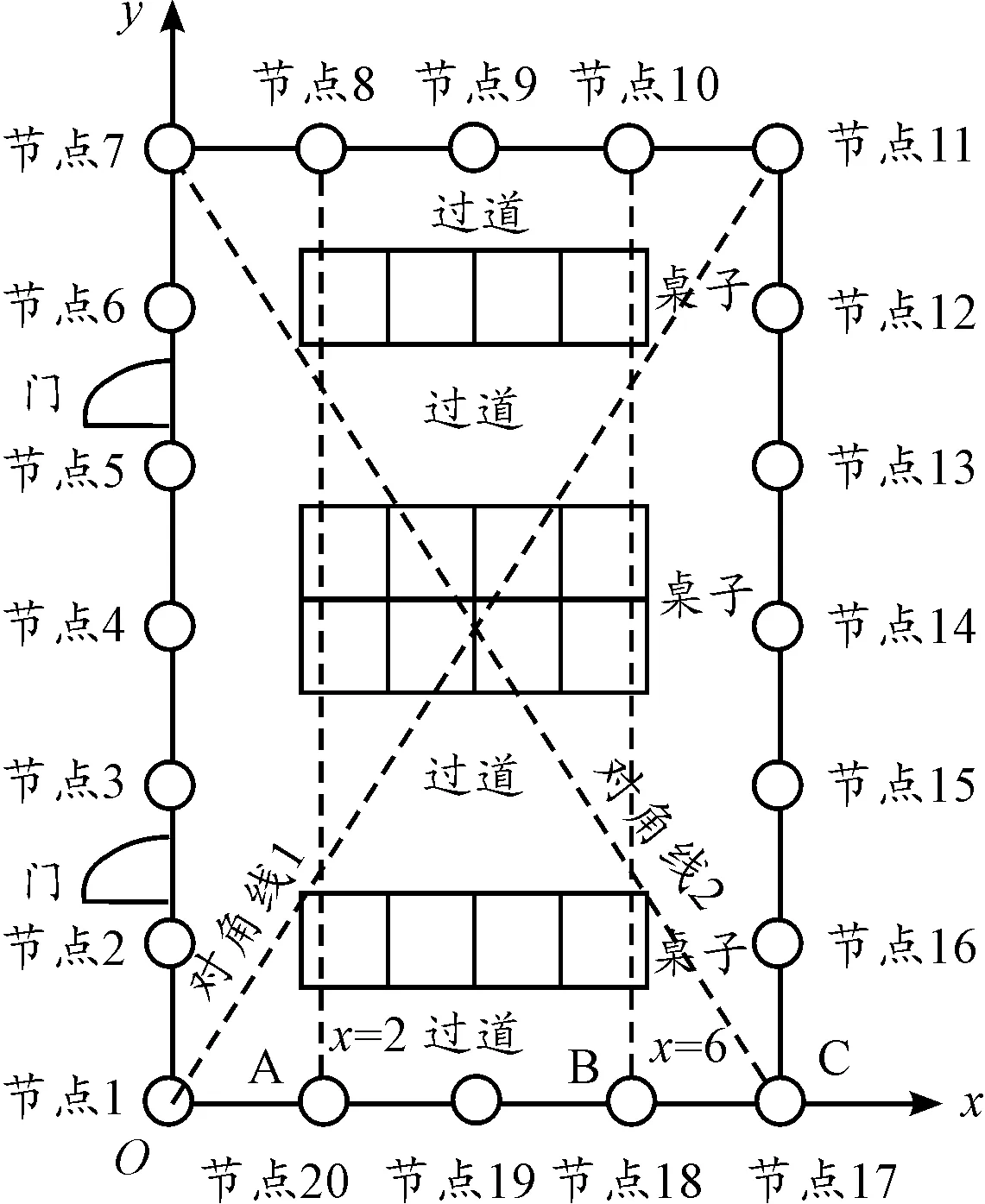
圖3 實驗平面布置圖
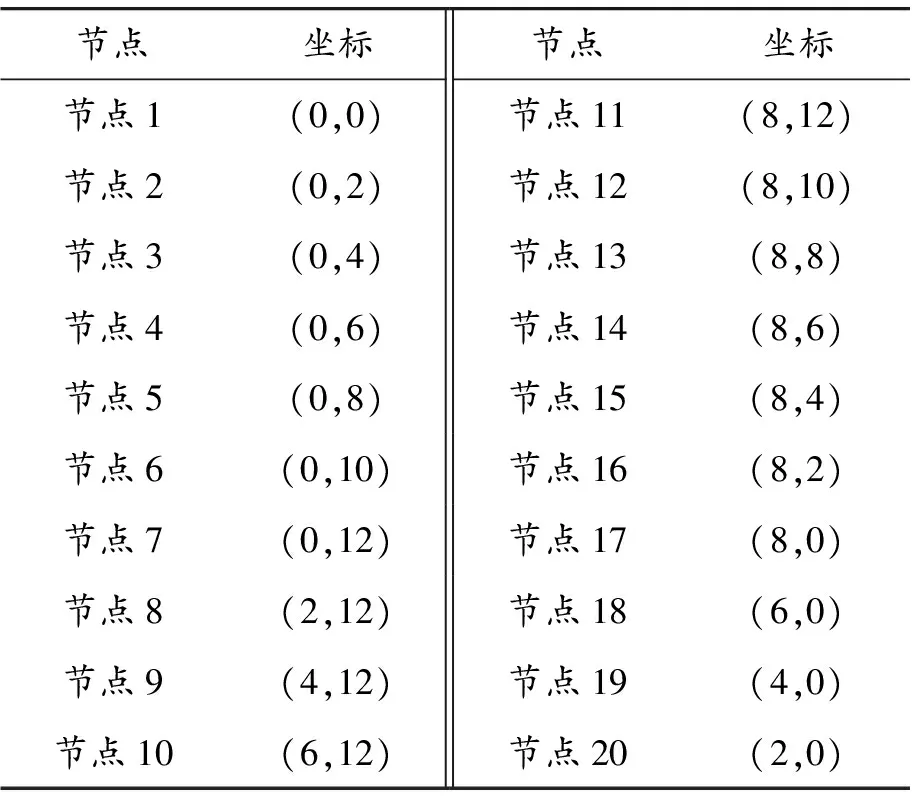
節點坐標節點坐標節點1(0,0)節點11(8,12)節點2(0,2)節點12(8,10)節點3(0,4)節點13(8,8)節點4(0,6)節點14(8,6)節點5(0,8)節點15(8,4)節點6(0,10)節點16(8,2)節點7(0,12)節點17(8,0)節點8(2,12)節點18(6,0)節點9(4,12)節點19(4,0)節點10(6,12)節點20(2,0)
5.2 確定傳輸模型
在安裝ibeacon節點前先對其進行配置,包括名稱、發射功率、發射周期等信息,配置完成后打開藍牙終端對ibeacon節點進行測試。本次測試使用帶有藍牙4.0的Android手機,圖4所示為接收到的ibeacon節點廣播的信息。為了更準確地求取信號傳輸模型,如圖3所示,在距離地面1.2 m處的O點、A點、B點和C點分別安裝1個ibeacon節點,然后分別在x=2、x=6、對角線1和對角線2四個方向上每間隔0.5 m取點采樣,每個方向選取24個點作為樣本點,每個點采樣20個RSSI值作為樣本值。將20個樣本值進行高斯-中值濾波優化處理,圖5為濾波的效果。

圖4 ibeacon節點測試圖
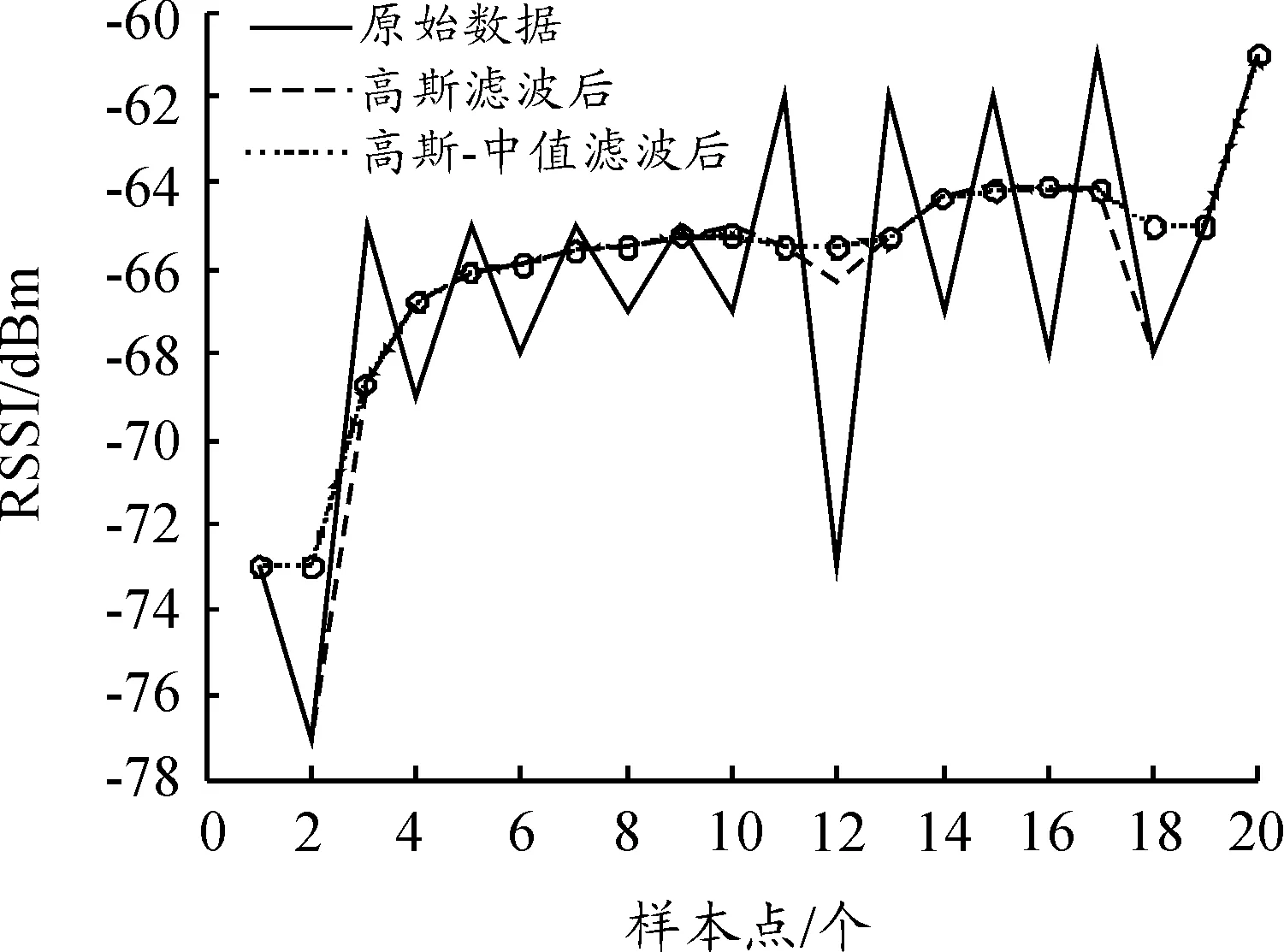
圖5 濾波效果
采樣完成后,將20個ibeacon節點按圖3安裝好。將采樣數據按x=2、x=6、對角線1和對角線2的順序分為4組,分別進行濾波平滑處理后計算每個樣本點的平均值。將平均值作為該點樣本值的最終值,由此得到4組樣本點的平均值如圖6所示。
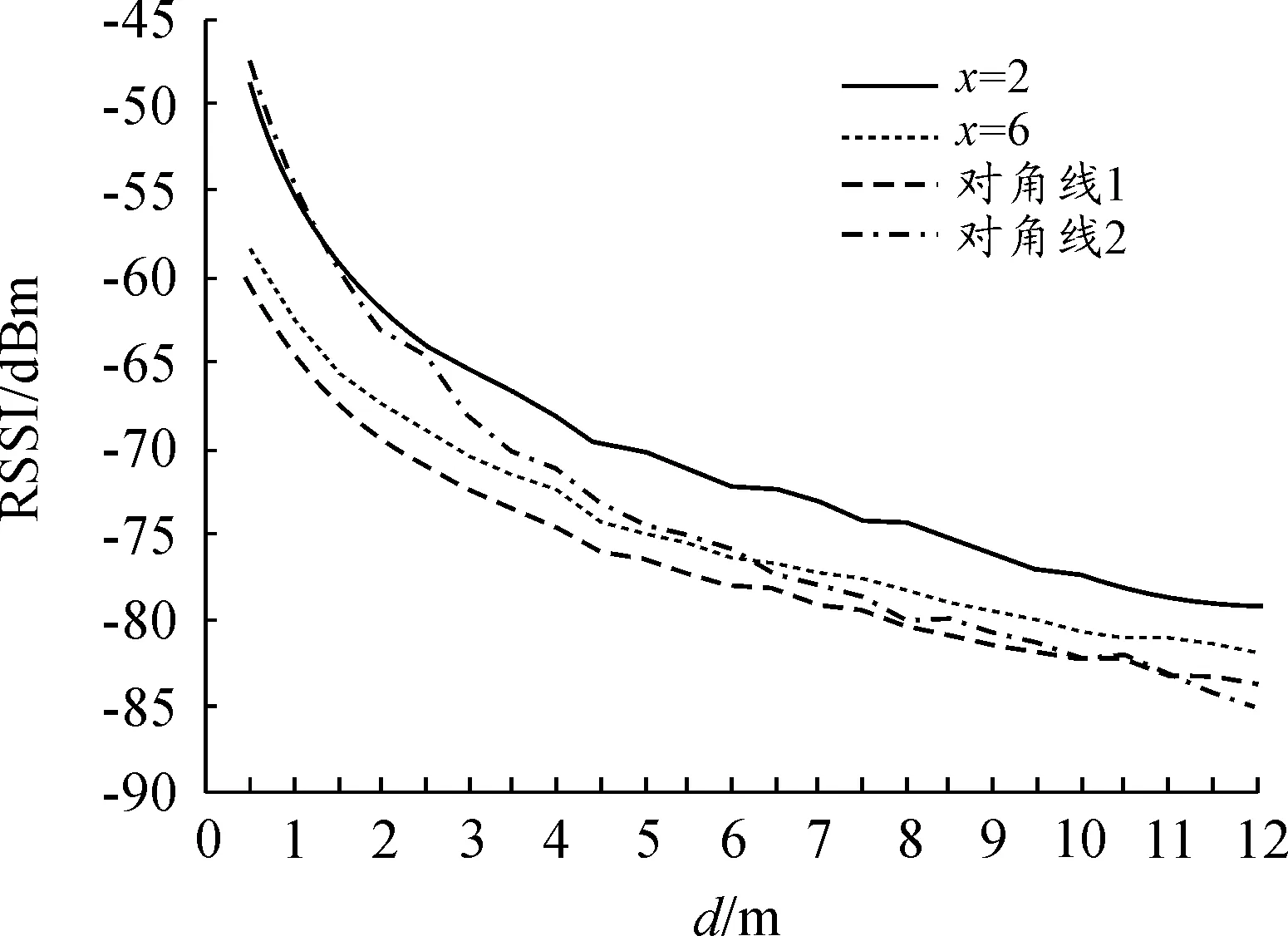
圖6 采樣點平均值統計
應用Matalab的擬合工具箱cftool先將這3組數據進行smooth處理,再按信號傳輸的shadowing簡化模型公式進行自定義曲線擬合,擬合結果如圖7所示。
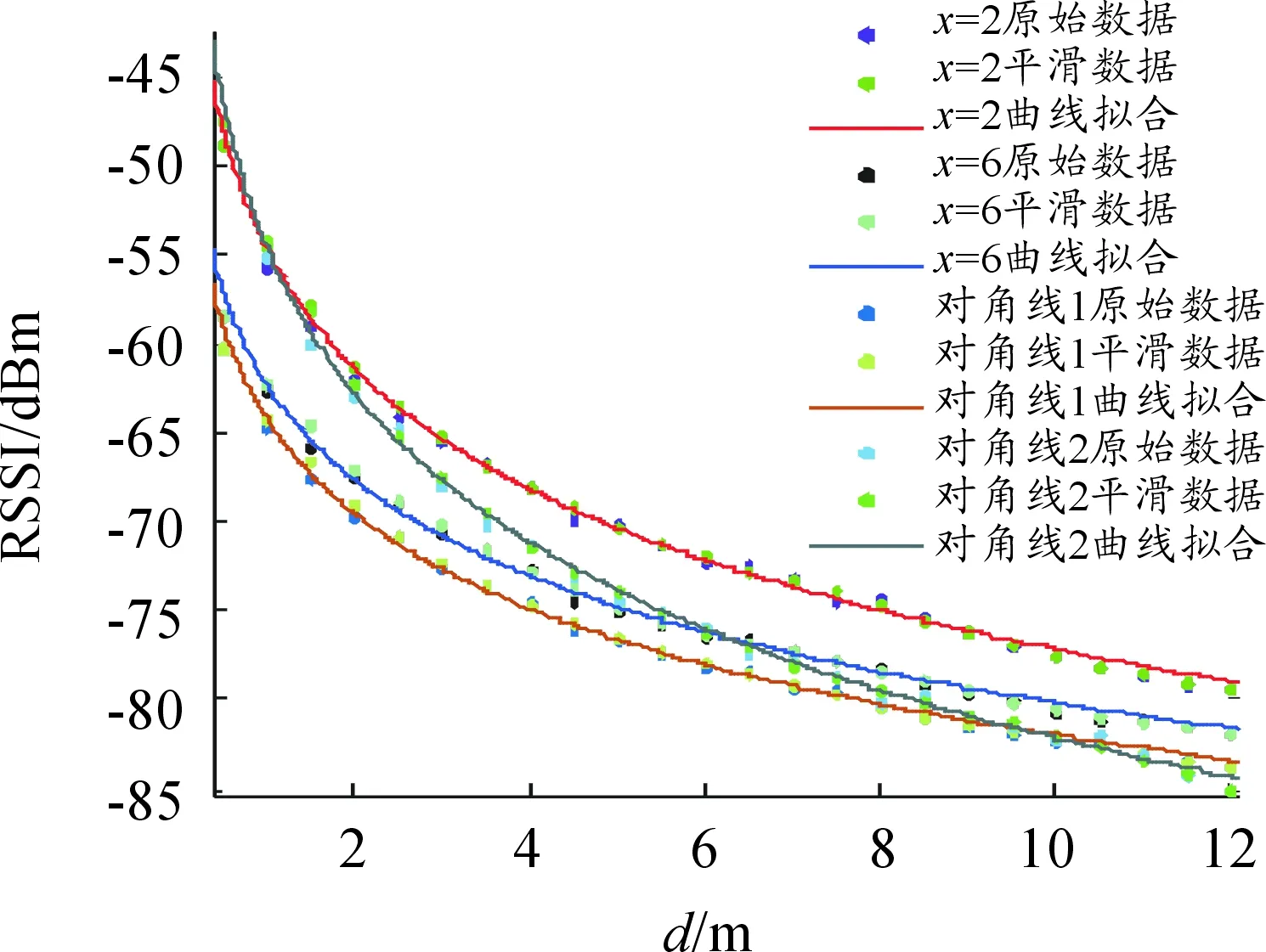
圖7 曲線擬合
通過擬合得到4個傳輸模型,見式(15)。
(15)
于是分別得到4組A和n的值:
(16)

RSSI=-58.87-13.2lg(d)
(17)
5.3 定位實驗與結果分析
在實驗室選取40個坐標已知的點進行實驗,分別在這40個點用手機終端接收20個ibeacon節點廣播的RSSI值,將RSSI值通過本文的算法求解,得出對該點坐標的估計值;再選擇RSSI值由大到小且其坐標不在同一直線上的3個ibeacon節點,用一般的基于距離倒數因子的加權三角質心定位算法分別對40個點進行估計。定位結果對比見圖8,誤差對比見圖9,可以看出本文算法相比一般的加權三角質心算法,定位精度有了提高,平均誤差減少了30%左右。
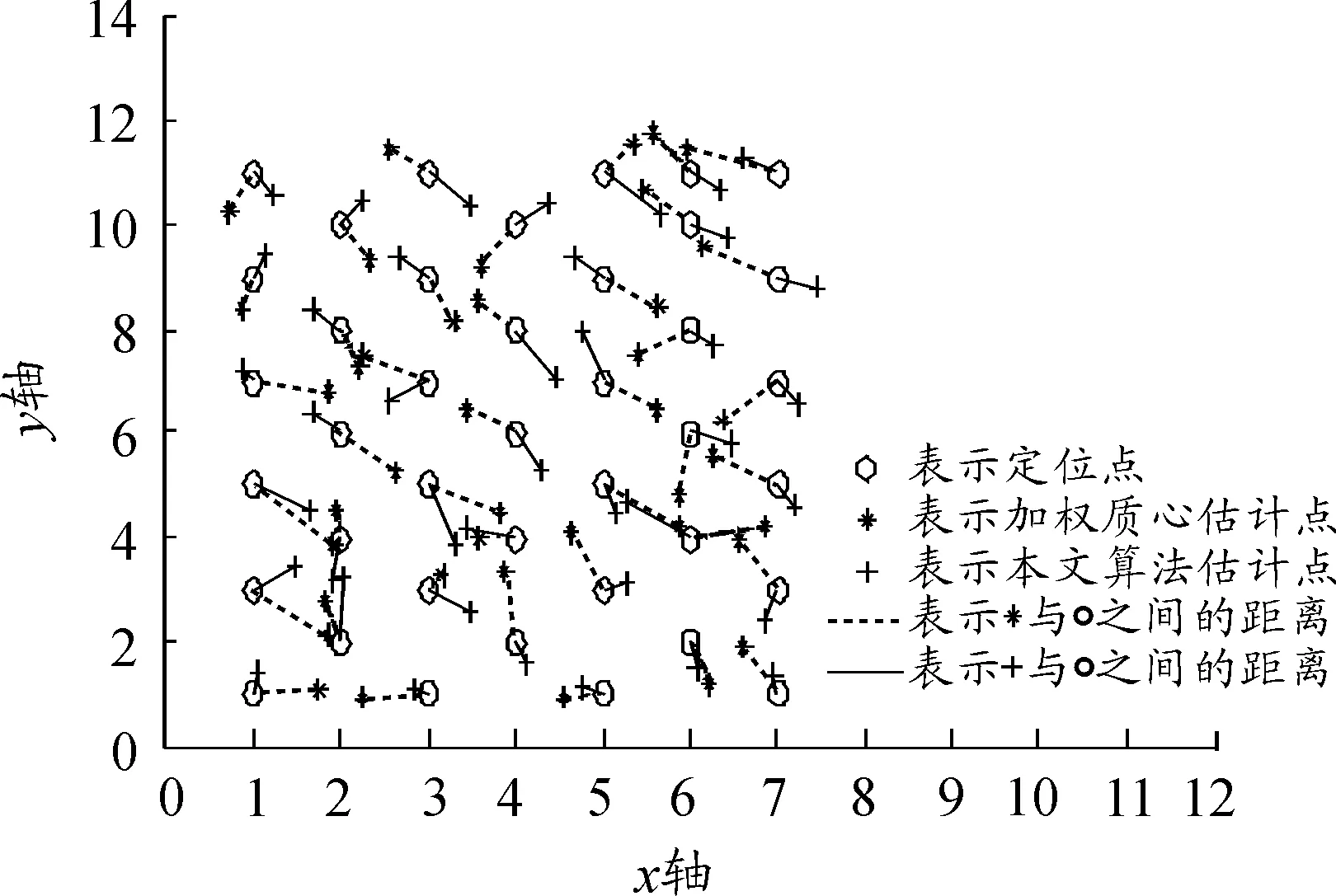
圖8 定位結果對比

圖9 定位誤差對比
6 結束語
本文提出了一種基于ibeacon的室內二階段定位算法,考慮到無線信號在室內傳播過程中容易受到衰減、反射、多路徑傳播等因素的影響,先對采樣數據進行去噪平滑處理,保證了計算信號實際傳輸模型的可靠性。在定位階段先采用極大似然估計對未知點進行粗略估計,縮小定位范圍,再通過改進的加權三角質心定位算法進行精細定位。本算法在計算過程增加不多的情況下提高了定位精度,體現了其優越性。實驗結果表明:本算法的定位精度提高到1.22 m,平均誤差減少到0.6 m,能滿足大多數的室內定位需求。
[1] 馬旭攀,惠飛,景首才,等.一種基于藍牙信標的室內定位系統[J].測控技術,2016(4):55-58,66.
[2] 馮星明,倪冰.主流室內定位技術應用研究[J].現代建筑電氣,2017(2):21-25.
[3] 張倬勝,馬方方,薛靜遠,等.基于iBeacon的精細室內定位方法研究[J].地理信息世界,2015(2):26-30.
[4] 石志京,徐鐵峰,劉太君,等.基于iBeacon基站的室內定位技術研究[J].移動通信,2015(7):88-91.
[5] 劉明偉,劉太君,葉焱,等.基于低功耗藍牙技術的室內定位應用研究[J].無線通信技術,2015(3):19-23.
[6] 韓江洪,祝滿拳,馬學森,等.基于RSSI的極大似然與加權質心混合定位算法[J].電子測量與儀器學報,2013(10):937-943.
[7] 陸楊潔,劉志勤,楊雷,等.基于接收功率電平的三角質心近距離定位算法[J].傳感器與微系統,2016(3):137-139,143.
[8] 楊博雄,倪玉華,劉琨,等.基于加權三角質心RSSI算法的ZigBee室內無線定位技術研究[J].傳感器世界,2012(11):31-35.
ResearchonIndoorTwoStageLocalizationAlgorithmBasedonIbeacon
ZHANG Lian1, LIU Zengli1, LI Yunhao1, CHEN Ling2
(1.School of Electrical and Electronic Engineering, Chongqing University of Technology, Chongqing 400054, China; 2.The 203rdResearch Institute of China Ordnance Industry, Xi’an 710065, China)
In view of the increasing demand for indoor location, an indoor two-stage localization algorithm based on ibeacon is proposed. When building the transmission model, the RSSI value is optimized by the combination of Gauss filter and median filter; When positioning is divided into two stages, to narrow the scope of location, and has a rough estimate of the unknown point coordinates of the first stage by the maximum likelihood method; In the second stage, the weighting factors of the triangle centroid algorithm are improved firstly, and then the improved weighted triangle centroid location algorithm is used to fine coordinate the unknown points. The experimental results show the accuracy of the proposed algorithm can reach 1.22 m in the laboratory environment, the positioning accuracy and stability are better than the general weighted triangle centroid algorithm, and the average error is reduced by about 30% compared with the general weighted triangle centroid algorithm.
ibeacon; two stage localization; RSSI; maximum likelihood; weighted triangle centroid algorithm
2017-07-11
張蓮(1967—),女,重慶人,教授,碩士生導師,主要從事遠程測試與控制技術、信號處理等方面的研究,E-mail:zh_lian@cqut.edu.cn。
張蓮,劉增里,李云昊,等.基于ibeacon的室內二階段定位算法研究[J].重慶理工大學學報(自然科學),2017(12):166-172.
formatZHANG Lian, LIU Zengli, LI Yunhao, et al.Research on Indoor Two Stage Localization Algorithm Based on Ibeacon[J].Journal of Chongqing University of Technology(Natural Science),2017(12):166-172.
10.3969/j.issn.1674-8425(z).2017.12.029
TN99
A
1674-8425(2017)12-0166-07
(責任編輯楊黎麗)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19