基于卡爾曼濾波和ISODATA的航標漂移預警方法
2018-01-10 00:06:26甘浪雄徐才云周春輝鄭元洲陳潤
上海海事大學學報 2017年4期
關鍵詞:卡爾曼濾波
甘浪雄+徐才云+周春輝+鄭元洲+陳潤
摘要:為解決目前航標遙控遙測系統中航標漂移誤報警過多的問題,提出一種基于卡爾曼濾波和迭代自組織數據分析算法(iterative self-organizing data analysis technique algorithm,ISODATA)的組合優化方法。該方法如下:對航標GPS接收機原始坐標數據進行濾波,消除波動較大的數據后得到較可靠的航標位置數據;使用ISODATA得出其聚類中心;以該聚類中心取代航標拋設位置作為航標回旋中心,計算航標漂移距離。測試結果表明,該組合優化方法能夠獲取較為準確的航標漂移距離,在降低航標維護成本的同時,還能有效減少誤報警。
關鍵詞: 航標; 卡爾曼濾波; 迭代自組織數據分析算法(ISODATA); 誤報警
中圖分類號: U644.1 文獻標志碼: A
Abstract: In order to solve the too much false alarm problem of the buoy drift in the remote control telemetry system, a combinatorial optimization method based on Kalman filtering and the iterative self-organizing data analysis technique algorithm (ISODATA) is proposed. The method is as follows: the buoy initial coordinate data from GPS are filtered to eliminate the fluctuated data, and the reliable buoy position data are obtained; the clustering center of the data is got by ISODATA; the clustering center is used as the buoy motion center instead of the buoy throw position to calculate the buoy drift distance. The test results show that, by the combinatorial optimization method, the more accurate buoy drift distance can be obtained, and the buoy maintenance cost and false alarm are both reduced.
Key words: buoy; Kalman filtering; iterative self-organizing data analysis technique algorithm (ISODATA); false alarm
0 引 言
航標是幫助和指引船舶航行,標示航道方向、界限和礙航物的重要標志。航標能否正常運行,關系著船舶的安全航行乃至船員的人身安全。隨著通信和網絡技術的快速發展,GPS在航標位置監測方面得到了應用。但GPS的定位精度受多徑效應、電離層延時誤差等因素的影響。[1]若定位誤差較大,則可能會頻繁發出誤報警,增加管理壓力。要減少誤報警,首先要采用適當的方法提高GPS定位精度。
目前,定位精度較高、技術較成熟的方法是差分GPS技術[2]:先利用已知精確坐標的差分GPS基準臺解算出修正量,用戶接收機利用該修正量對觀測數據進行修正,從而得到較高精度的定位數據。差分技術的應用成本較高且受工作區的限制,因此有必要研究如何提高低成本的GPS自主式定位精度。目前,提高GPS自主式定位精度的方法主要是采用各類濾波算法對GPS接收機數據進行實時或事后處理。[3-4]張淑芳等[5]首次采用線性系統的識別方法和最小二乘法得到了準ARMA模型(auto-regressive and moving average model),對GPS輸出數據進行實時建模與預測;常青等[6]提出在四星定位星座中增加第五顆星的選擇方法,并以該方法和最小二乘遞推估計為基礎提出一種遞推算法,提高了定位精度。杜曉輝等[7]使用卡爾曼濾波對GPS接收機數據進行處理,得到較小的估計誤差,證明了卡爾曼濾波用于GPS靜態單點定位的可靠性。在提高航標定位精度理論方面:林藝芳等[8]提出一種通過事先確定的基點來計算觀測點與基點的距離進而實現航標GPS異常點判別的方法,該方法受主觀因素影響較大;陳芹[9]采用基于距離的線性內插模型的偽距改正數算法來提高GPS定位精度;聶婧[10]將卡爾曼濾波引入航標系統中,對GPS觀測數據進行平滑處理,有效地抑制了誤差隨時間累計逐漸發散的現象。然而,上述提高GPS定位精度的算法均停留在理論層面,并未考慮航標所處惡劣環境對航標定位造成的影響。劉勝等[11]首次提出一種基于卡爾曼濾波和FCM(fuzzy C-means)聚類的方法,并進行了相關試驗,實現了GPS定位精度的提高。實現FCM聚類需要選擇合適的平滑因子,但平滑因子的選取目前缺乏理論支持和有效性評價準則。DUNN[12]第一次提出應用模糊數學的迭代自組織數據分析算法(iterative self-organizing data analysis technique algo-rithm,ISODATA),通過不斷修正聚類中心位置來實現分類。張麗娜等[13]采用ISODATA實現了數據結構復雜、離散度大的大樣本數據的有效聚類。
本文先對影響航標漂移量的因素進行分析,對不同水深處、不同傾角的航標的漂移量進行理論計算,論證本文研究的必要性,然后采用卡爾曼濾波對航標GPS接收機數據進行濾波,濾除波動較大的數據,再對濾波后的數據進行聚類分析,得出其聚類中心。分別以該聚類中心和航標拋設位置為基準點計算航標漂移量并進行比較,驗證方法的有效性,以期實現航標漂移有效預警和減少誤報警。endprint
1 航標漂移量建模及誤報警問題分析
1.1 航標漂移量建模
1.1.1 航標的回旋半徑e1
航標是由系碇和錨鏈系留于水中的。國際航標協會(IALA)在1998年關于通用系碇系統設計的建議[14]中指出航標錨鏈布放長度與水深的關系:在一般情況下,水深小于50 m時航標錨鏈最小布放長度為水深的2倍,水深大于50 m時航標錨鏈最小布放長度為水深的1.5倍。以系碇為中心,航標的最大活動半徑為回旋半徑。設錨鏈長度為L,水深為D。理論上,回旋半徑e1為e1=0.8 L2-D2
1.1.2 航標傾斜對GPS接收機的影響
GPS接收機天線通常安裝在航標架上。假設在GPS無測量誤差,無風、浪、流等影響的理想狀況下,航標在水面上保持正立,GPS接收機天線與航標中心重合,此時GPS接收機測量到的位置即航標的中心位置。在風、浪、流等的作用下,航標會產生一定角度的傾斜,天線位置會偏離航標中心(見圖1),此時GPS接收機測量到的位置會與實際中心出現偏差。設航標高度為H,航標傾斜角為θ,則其偏差e2大小為e2=Hsinθ
1.1.3 航標拋設時的定位誤差e3
在進行航標拋設作業時,為提高航標布設的精度,航標船需要獲取前甲板作業點準確的位置信息。目前,主要憑借駕駛人員經驗和船載GPS天線位置、航速、航向等估算航標拋設點位置,設其誤差為e3。這種方式存在定位誤差大、無法準確記錄航標布設位置等缺點。根據《海區航標效能驗收規范(JT 759—2009)》,航標的推算系碇位置與設計位置誤差值應小于30 m,本文假設e3≤15 m。
1.1.4 GPS定位誤差e4
GPS的定位精度受很多因素影響,諸如衛星星歷誤差、衛星鐘差、大氣折射誤差和接收機天線相位中心偏差等。目前民用GPS定位精度e4約為5~15 m。
1.1.5 漂移量建模
綜上所述,假設水深為常量,航標漂移量理論計算模型為E=e1+e2+e3+e4=
0.8 L2-D2+Hsinθ+e3+e4
(3)1.2 航標漂移誤報警問題分析
《東海海區航標配布規定(試行)》(以下簡稱《規定》)中指出,浮動標志位置與航道邊線的橫向距離通常以20~50 m為宜。參照該標準,航標的漂移報警閾值應不超過50 m。根據式(3),本文對不同水深(5~30 m)處、不同傾角的航標的漂移距離進行了計算,結果見圖2。
由圖2可知,隨布設航標處水深的增加,航標漂移距離迅速增大。受各種誤差的影響,圖2中漂移距離大于50 m的點占所有計算點的比例為50%。若直接采用憑經驗估計的拋設位置與GPS觀測的原始數據來判斷漂移距離是否超出要求值,必定會引起頻繁的誤報警。若采用增大報警閾值的方式來減少誤報警概率,則當航道水深較大時報警閾值將大大增加,無法滿足《規定》要求。因此,有必要采取措施來實現在不加大報警閾值的同時減少誤報警。
2 GPS數據處理
2.1 卡爾曼濾波模型及數據處理
卡爾曼濾波是在對系統可觀測信號進行測量的基礎上,根據一定的濾波準則,采用某種統計量最優方法,對系統的狀態進行估計的理論和方法,預測時具有無偏、穩定和最優的特點。[15]由于受到各種干擾的影響,GPS接收機的觀測數據波動較大,不可直接使用。為了解決這個問題,采用卡爾曼濾波處理GPS接收機原始數據,得到比較可靠的定位數據,將濾波后的精度控制在可接受的范圍內。
根據航標低動態運動特點,將其近似當作定常速度模型,以待測點的位置和速度作為狀態變量。為便于處理觀測數據,假定系統噪聲和觀測噪聲為高斯白噪聲,將其視為一個線性系統,采用卡爾曼濾波的方法進行數據處理。根據以上分析,定義狀態變量為x=(x y x · y ·)
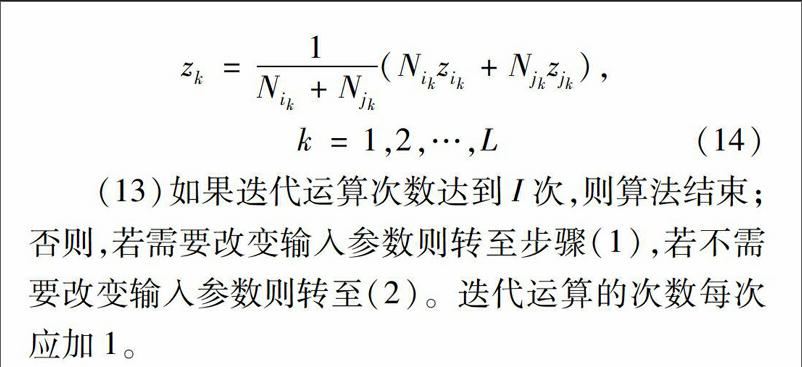
2.2 ISODATA確定坐標
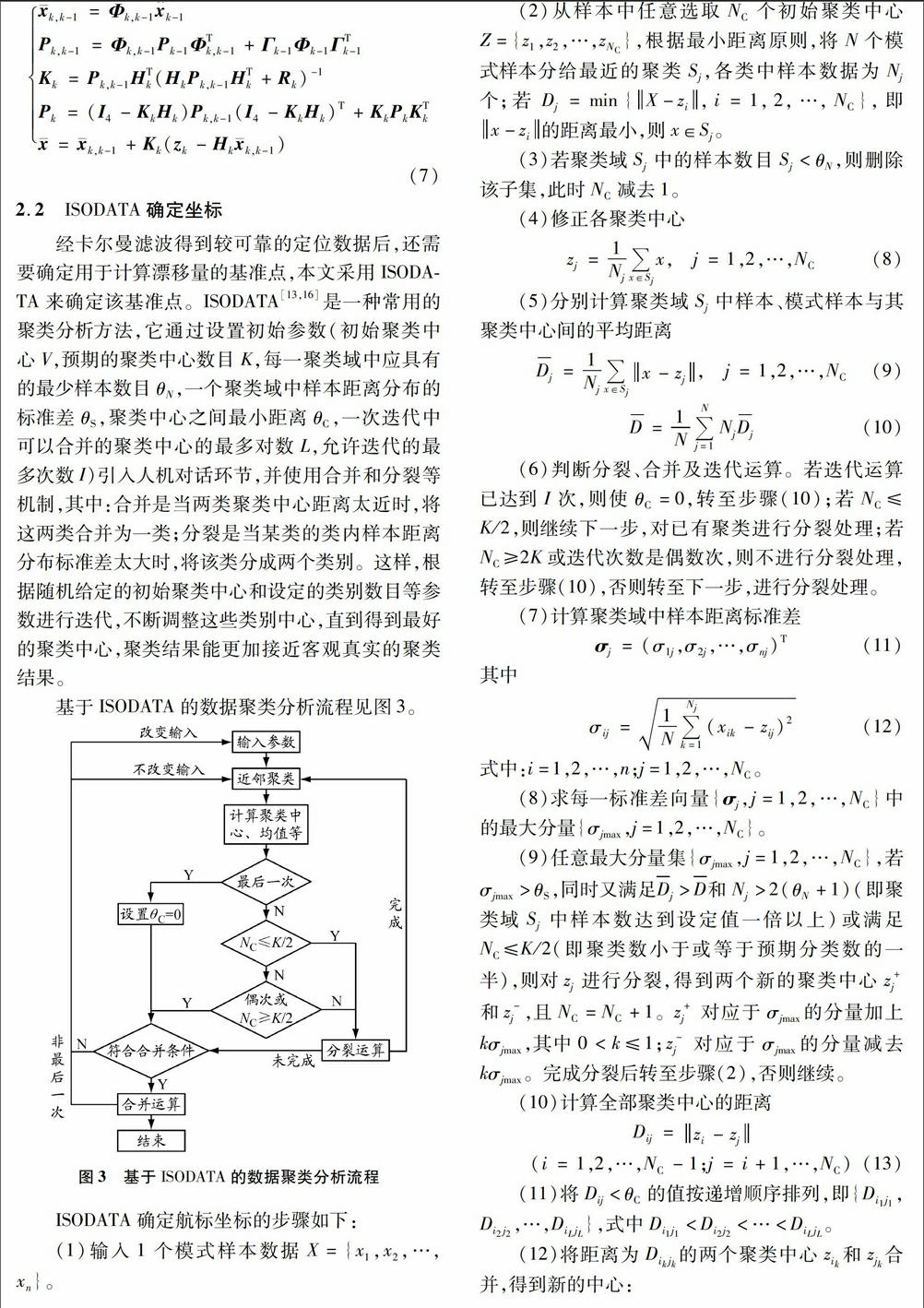
經卡爾曼濾波得到較可靠的定位數據后,還需要確定用于計算漂移量的基準點,本文采用ISODATA來確定該基準點。ISODATA[13,16]是一種常用的聚類分析方法,它通過設置初始參數(初始聚類中心V,預期的聚類中心數目K,每一聚類域中應具有的最少樣本數目θN,一個聚類域中樣本距離分布的標準差θS,聚類中心之間最小距離θC,一次迭代中可以合并的聚類中心的最多對數L,允許迭代的最多次數I)引入人機對話環節,并使用合并和分裂等機制,其中:合并是當兩類聚類中心距離太近時,將這兩類合并為一類;分裂是當某類的類內樣本距離分布標準差太大時,將該類分成兩個類別。這樣,根據隨機給定的初始聚類中心和設定的類別數目等參數進行迭代,不斷調整這些類別中心,直到得到最好的聚類中心,聚類結果能更加接近客觀真實的聚類結果。
基于ISODATA的數據聚類分析流程見圖3。
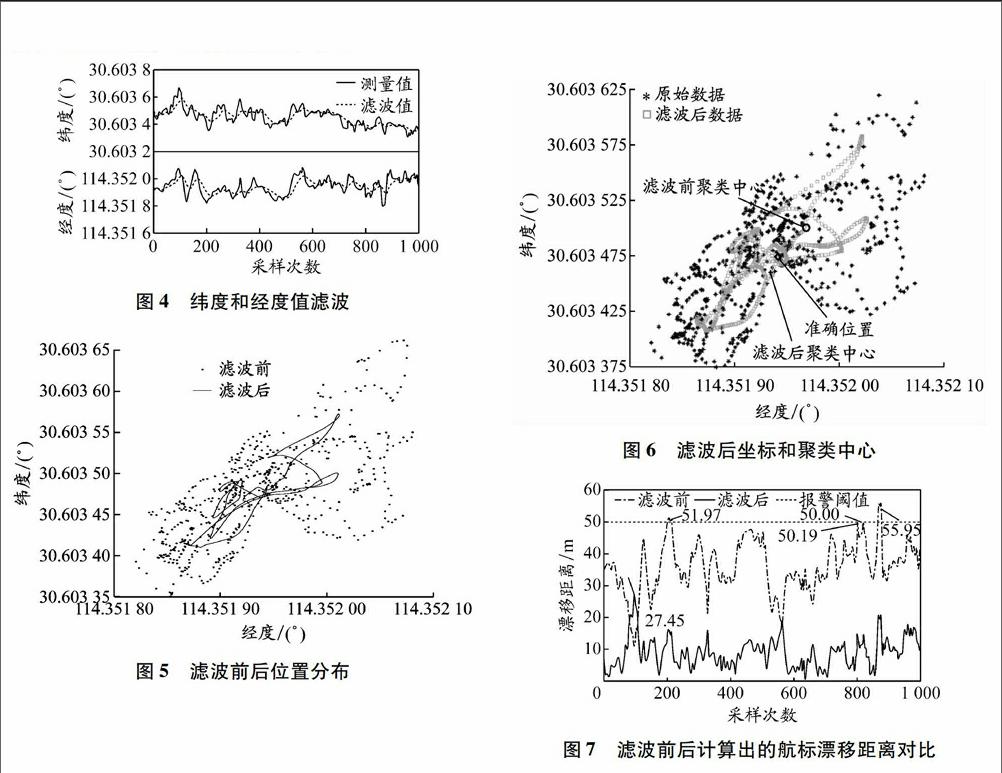
濾波的目的是對原始數據進行事后處理,剔除波動較大的數據。GPS接收機原始數據經卡爾曼濾波處理后,逼近所測位置的真實坐標。濾波后的數據在一個較小的區域內,要得到高精度的坐標位置,必須進一步進行數據處理。根據本文所述,無須對GPS數據進行分類,只確定其聚類中心即可。對濾波數據采用ISODATA進行聚類,結果見圖6。
為便于比較濾波前后的聚類精度,試驗前用高精度RTK設備測定GPS接收機的精確坐標。由圖6可知,濾波后的聚類中心更接近GPS接收機真實位置,證明了利用該組合優化方法確定聚類中心的準確性。
3.2 濾波前后航標漂移距離及誤報警分析
分別以航標拋設估算位置和采用組合優化方法后確定的聚類中心為基準位置計算航標漂移距離,報警閾值設為50 m。由圖7可知:采用未經優化方法處理的數據,計算出的漂移距離平均值為35.87 m,在測試中觸發了至少4次報警(報警后經現場確認,航標未發生漂失,因此其均為誤報警),其中有131組數據計算值超過45 m,占所有數據的比例為13.1%;采取優化方法后,計算出的漂移距離平均值為8.796 m,最大值為27.45 m,報警次數為0。endprint
4 結 論
結合航標實際工作情況,提出基于卡爾曼濾波和ISODATA的航標GPS單點定位組合優化方法,利用在實際航標上搭載的GPS模塊進行了相關試驗。試驗結果表明該方法可有效減少航標漂移誤報警,驗證了方法的準確性。用該方法可大大降低航標維護人力、物力成本,對提高航標管理效率、減輕管理人員壓力及保障航行安全有重要意義。
參考文獻:
[1] 游廣芝. GPS導航定位中的誤差分析與修正[D]. 哈爾濱: 哈爾濱工業大學, 2007.
[2] 付向斌, 戴亞文, 林金村. 航標燈多基站GPS偽距差分定位新方法[J]. 武漢理工大學學報(信息與管理工程版), 2011, 33(5): 735-737. DOI: 10.3963/j.issn.1007-144X.2011.05.015.
[3] TU Xianqin, MENG Qinghai, YI Dongyun, et al. Evaluation of kinematic airborne GPS data processing using precise point positioning approach[C]//International Conference on Computer Science and Electronics Engineering. IEEE Computer Society, 2012: 63-68.
[4] GAO Y. GPS positioning accuracy using precise real-time ephemeris and clock correction[J]. Marine Geodesy, 1994, 17(4): 279-288. DOI: 10.1080/15210609409379736.
[5] 張淑芳, 袁安存. 提高GPS定位精度的新方法[J]. 中國航海, 1997(1): 6-10.
[6] 常青, 柳重堪, 張其善. 基于最小二乘遞推估計的GPS定位算法[J]. 北京航空航天大學學報,1998, 24(3): 15-18. DOI: 10.13700/j.bh.1001-5965.1998.03.005.
[7] 杜曉輝, 任章. 基于卡爾曼濾波的GPS靜態定位精度分析[J]. 全球定位系統, 2008, 33(5): 47-51.
[8] 林藝芳, 李汪彪, 蘇偉達, 等. 一種航標定位的GPS異常點快速判別及剔除方法[J]. 現代電子技術, 2008, 31(17): 4-6. DOI: 10.3969/j.issn.1004-373X.2008.17.002.
[9] 陳芹. 航標監控及GPS高精度定位方法研究[D]. 合肥: 合肥工業大學, 2012.
[10] 聶婧. 智能航標燈系統及其GPS定位算法研究[D]. 合肥: 合肥工業大學, 2012.
[11] 劉勝, 張青春, 張蘭勇. 聚類算法的GPS靜態單點定位方法[J]. 哈爾濱工業大學學報, 2012, 44(11): 71-74. DOI: 10.11918/j.issn.0367-6234.2012.11.014.
[12] DUNN J C. A fuzzy relative of the ISODATA process and its use in detecting compact well-separated clusters[J]. Journal of Cybernetics, 1974, 3(3): 32-57. DOI: 10.1080/01969727308546046.
[13] 張麗娜, 姜新華, 那日蘇. 基于改進的ISODATA算法的大樣本數據聚類方法研究[J]. 內蒙古農業大學學報(自然科學版), 2013, 34(1): 133-137.
[14] 張志江, 張蓓敏, 樂奇博, 等. 不同環境下燈浮標錨鏈的布放長度計算[J]. 水運管理, 2016, 38(3): 25-27. DOI: 10.3969/j.issn.1000-8799.2016.03.008.
[15] 嚴浙平, 黃宇峰. 基于卡爾曼濾波的動目標預測[J]. 應用科技, 2008, 35(10): 28-32. DOI: 10.3969/j.issn.1009-671X.2008.10.008.
[16] 何霽, 滕奇志, 羅代升, 等. 一種改進的ISODATA算法及在彩色熒光圖像中的應用[J]. 四川大學學報(自然科學版), 2007, 44(3): 563-568.DOI:10.3969/j.issn.0490-6756.2007.03.024.
(編輯 賈裙平)endprint
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36