一種適合船舶中壓直流電力系統的MMC并聯結構
2018-01-10 12:00:09郭燚雷玉磊張震
上海海事大學學報 2017年4期
關鍵詞:船舶
郭燚+雷玉磊+張震


摘要:鑒于模塊化多電平變換器(modular multilevel converter,MMC)橋臂額定電流難以滿足船舶中壓直流(medium voltage direct current,MVDC)電力系統逐漸增大的功率傳輸需求,設計一種適用于船舶MVDC大功率電力系統的MMC并聯結構。應用MATLAB/Simulink,分別在MMC并聯結構和MMC基本結構下,建立MMC-MVDC電力系統仿真模型。仿真結果表明,在傳輸同樣大的功率時,采用MMC并聯結構的橋臂電流明顯比采用MMC基本結構的橋臂電流小,能克服MMC子模塊中IGBT元件額定電流較小的障礙。
關鍵詞: 船舶; MMC并聯結構; 中壓直流電力系統; 橋臂電流
中圖分類號: U665.12 文獻標志碼: A
Abstract: In view of the fact that the rated current of the bridge arm of the modular multilevel converter (MMC) can not meet the increasing demand for power transmission in the ship medium voltage direct current (MVDC) power system, a kind of MMC parallel structure suitable for ship MVDC high power system is designed. By MATLAB/Simulink, the simulation models of the MMC-MVDC power system are established for MMC parallel structure and MMC basic structure, respectively. The simulation results show that, when the same power is transmitted, the current of the bridge arm with MMC parallel structure is significantly lower than that of the bridge arm with MMC basic structure, which overcomes the obstacle of the lower rated current of the IGBT component in the MMC sub-module.
Key words: ship; MMC parallel structure; medium voltage DC (MVDC) power system; bridge arm current
0 引 言
近年來,船舶中壓直流(medium voltage direct current, MVDC)電力系統的概念被提出。與船舶中壓交流電力系統相比,該系統具有較高的能量傳輸效率、較好的靈活性和較低的成本[1-2]。模塊化多電平轉換器(modular multilevel converter, MMC)具有直接控制直流電流的能力,能夠增強MVDC電力系統的可靠性和恢復性,實現對故障電流限制和故障穿越的功能。這些特點使得MMC整流拓撲結構在MVDC電力系統中有很好的應用前景[3-4]。
針對船舶MVDC電力系統母線電壓不變的特點,對MMC直流側的控制選用定直流電壓控制。將MMC應用于高壓直流系統中時選用較高的電壓等級和較多的子模塊數。在MVDC電力系統中由于電壓等級較低,而船舶發電機輸出的功率較大,因此實現整流時每個橋臂需承受很大的電流。然而,受限于開關元件的通流能力,MMC的傳輸容量受到限制,不易實現大功率的傳輸。MMC橋臂的額定電流主要取決于絕緣柵雙極型晶體管(IGBT)的額定電流,目前IGBT額定電流最大值為3 600 A(額定電壓為1.7 kV)[5]。在目前的技術條件下,開關元件的容量在短期內難有突破性發展。針對這一問題,本文設計了適合船舶MVDC大功率電力系統的MMC并聯結構,在滿足穩定輸出的同時使MMC各橋臂中開關元件承受的電流減小。
1 船舶MVDC電力系統模型
隨著船舶電力系統的發展,船舶MVDC電力系統已經引起世界各國的重視,文獻[6]和[7]提出了一種占用空間少、效率高的高性能船舶MVDC電力系統模型,見圖1。
該模型中含有2臺額定功率為36 MW的主發電機和2臺額定功率為4 MW的輔助發電機,4臺發電機發出的交流電經過AC/DC整流器整流后為環形MVDC母線輸送能量。該模型從船首到船尾依次是4個區域負載中心和1個雷達負載,各個分區都與環形MVDC母線直接相連,可以靈活應用于不同的工作環境。環形母線電壓可在1~35 kV之間選擇,跨越多個等級,本文選擇10 kV直流母線電壓[8]。針對船舶MVDC電力系統模型,本文選用MMC作為整流器實現交直流變換[9],重點研究MMC拓撲結構。
2 船舶MVDC電力系統MMC拓撲結構設計2.1 MMC拓撲結構
本文主要研究船舶MVDC電力系統中,將主發電機發出的交流電整流成直流電的MMC拓撲結系統中的連接結構構。MMC在船舶MVDC電力系統中的連接結構如圖2所示,本文稱之為MMC-MVDC系統。
2.2 MMC基本結構橋臂電流分析
MMC-MVDC系統中MMC基本結構如圖3所示,其中SM為子模塊。
2.3 MMC并聯結構橋臂電流分析
由于直流母線電壓穩定在10 kV,當傳輸功率增大時,總直流電流逐漸增大,當橋臂電流超過3 600 A時,系統無法正常運行。針對這一問題設計合適的MMC并聯結構[11],根據不同的功率需求將n(n≥2)個MMC并聯在一起,并制定與之相適應的endprint
圖4 MMC并聯結構控制策略,使得并聯的MMC之間的相互影響較小。MMC并聯結構見圖4。
以2個MMC并聯結構為例,見圖5。
3 2個MMC并聯拓撲結構控制策略
對于一般結構的MMC,目前常采用矢量控制方法,主要由內環電流控制器和外環功率控制器構成,其中直流側電壓是外環功率控制器的控制變量之一。針對船舶MVDC電力系統的直流母線電壓特點,本文外環功率控制器采用直流側電壓與交流側無功功率的控制變量組合,為內環提供參考電流[12]。
3.1 2個MMC并聯結構控制器
電壓外環和電流內環的雙閉環控制結構見圖6,其中SPWM為正弦脈寬調制器。
對于電壓外環,交流側根據三相交流電壓和電流計算出無功功率Q,并將其與無功功率給定值Q*相比較,直流側通過測量得出直流母線電壓Udc,并將其與給定電壓值U*dc比較,然后通過PI調節,為電流內環提供參考電流i*d和i*q,這樣就形成了電壓外環控制器。將交流側三相電壓電流通過abc/dq變換,轉換成dq坐標系下的分量usd,usq,id,iq,并將其與電壓外環形成的參考電流i*d和i*q比較;通過內環電流解耦控制器得到dq坐標系下的分量ud和uq,再經過dq/abc變換得到三相調制波ura,urb,urc;將三相調制波與給定的三角載波相比較形成MMC中IGBT的PWM開關信號。
3.2 MMC調制方式及子模塊電容電壓平衡控制
對于適用于船舶MVDC電力系統的MMC并聯結構,各橋臂子模塊電容電壓平衡問題十分重要,這是因為MVDC母線電壓是由各相子模塊的電壓支撐起來的。為提高這種MMC結構運行的穩定性,針對MVDC電力系統的電壓特點,采用載波移相調制(CPSM)方式(各子模塊開關頻率相等,三角載波的頻率相同,相位均等錯開)[13]。由于MMC中各子模塊的參考電壓相同,能量分布相對比較均衡,選用這種調制方式本身就有利于子模塊電容直流電壓平衡,對并聯MMC拓撲結構比較有效。
由于引起子模塊電容電壓不平衡的原因有多種,需要采用特定的子模塊電容電壓均衡策略。針對MMC并聯結構,本文采用附加參考電壓平衡控制法[14]。某橋臂某子模塊的參考電壓生成過程見圖7。
4 MMC并聯結構與MMC基本結構對比仿真驗證 為驗證MMC并聯結構在船舶MVDC大功率電力系統中的優越性,應用MATLAB/Simulink對采用MMC基本結構和MMC并聯結構的船舶MVDC電力系統傳輸大功率時的情況進行仿真對比,其中MMC并聯結構由2個完全相同的MMC模塊并聯而成,下文MMC1代表并聯結構中的一個。
仿真參數:子模塊數N=10;橋臂串聯電感L0 =5 mH;子模塊電容C0 =20 mF;交流系統線電壓有效值US = 4.16 kV;交流系統等效電感LS =1 mH;交流系統等效電阻RS = 0.01 Ω;直流母線電壓Ud =10 kV;子模塊直流電壓Uc =1 kV;PWM載波頻率fca = 2 000 Hz。
4.1 直流母線電壓仿真結果分析
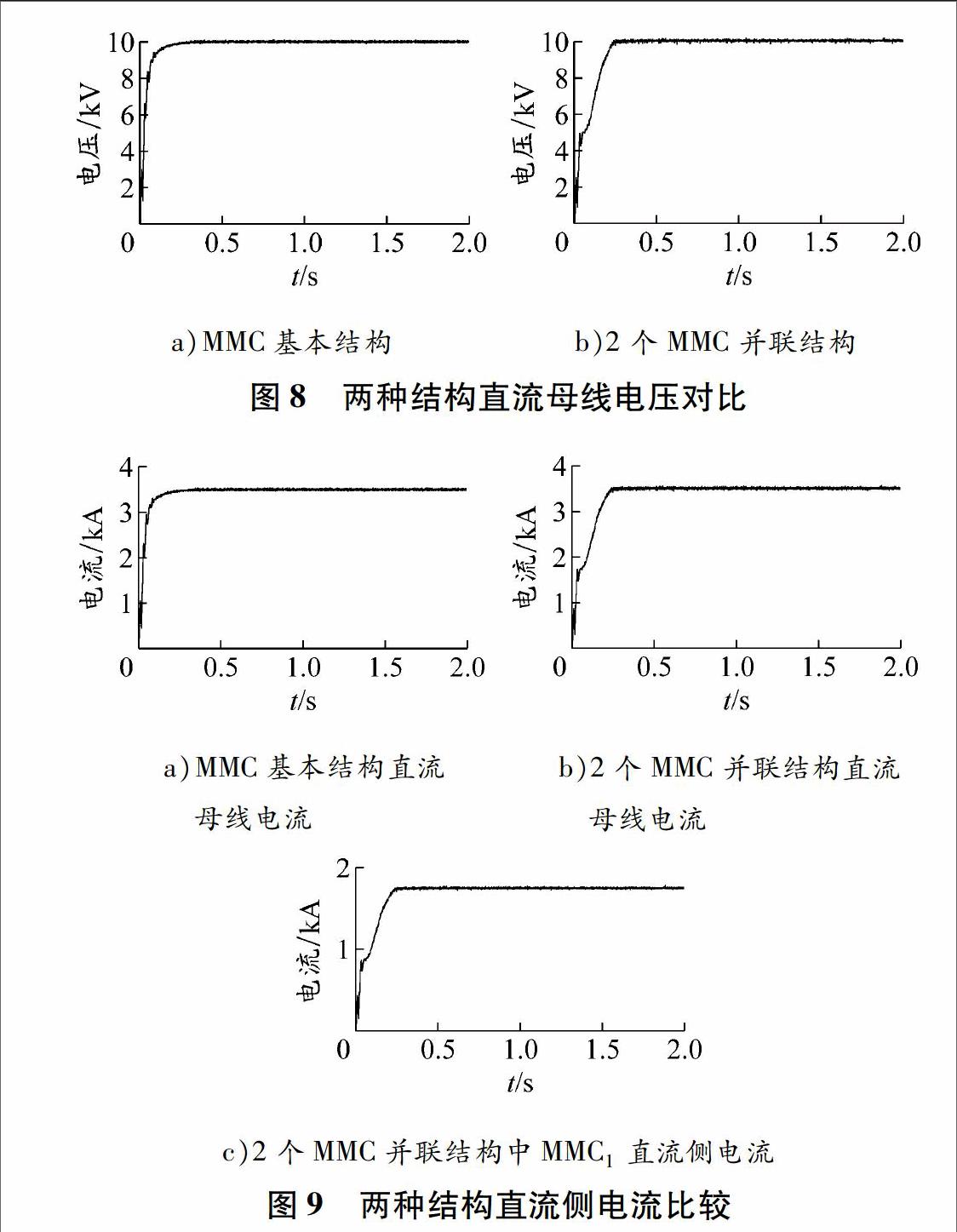
兩種結構直流母線電壓仿真結果對比如圖8所示,兩種結構接入相同的負載。由圖8可以看出:在MMC基本結構中,直流母線電壓在0.2 s時達到穩態;在MMC并聯結構中,由于MMC單元采用并聯結構,子模塊的數量增多,在0.25 s時母線電壓達到穩態。后者與前者達到穩態的時間相差較小,說明MMC并聯結構對系統達到穩態的時間影響不大。系統進入穩態后,兩種結構直流母線電壓均穩定在10 kV,且紋波滿足要求,為橋臂電流的分析提供了基礎。
4.2 直流側電流仿真結果分析
由圖9所示,兩種結構直流母線電流分別在0.2 s和0.25 s達到穩定值3 500 A,但在MMC并聯結構下,MMC1的直流側電流為1 750 A左右,約為直流母線電流的1/2,較好地實現了均流作用。
4.3 交流側電流仿真結果分析
如圖10所示:在 MMC基本結構下,MMC交流側電流在0.15 s就達到穩定電流值6 kA;在MMC并聯結構下,MMC1交流側電流在0.25 s達到穩定值3 kA。這說明采用MMC并聯結構可以降低交流電流的大小,這是MMC并聯結構下比MMC基本結構下橋臂電流小的原因之一。MMC模塊并聯后,MMC的子模塊數量增多,子模塊電容電壓的均衡以及環流的干擾導致系統響應時間變長,但在允許范圍之內,不會對系統造成大的影響。
4.4 MMC橋臂電流仿真結果分析
圖11a)和11b)分別為MMC基本結構中a相上、下橋臂電流,它們的變換范圍分別為-2~4 kA和-4~2 kA,可知此時橋臂承受的電流幅值為4 kA。目前世界上存在的IGBT額定電流最大值為3 600 A,故在這種情況下,即使MMC的IGBT在極限參數下工作,仍不能滿足需求。
圖11c)和11d)為MMC并聯結構中MMC1的a相上、下橋臂電流仿真結果,它們的變化范圍分別為-1~2 kA和-2~1 kA。對比結果可以看出,MMC單元橋臂電流減小了一半,2 kA是MMC并聯拓撲結構下的橋臂電流幅值,在當前技術條件下,有多種IGBT可供選擇。
結果驗證了前文分析是正確的,即這種MMC并聯結構對降低MMC橋臂電流有效,可以有效避免MMC中的IGBT在極限參數下工作。在這種拓撲結構中,MMC并聯模塊之間的電流能夠保持相對均衡,偏差很小,這說明這種結構本身具有均流的特性,不需要另外添加控制器來維持MMC模塊之間的電流均衡。綜上,MMC并聯結構在船舶MVDC電力系統傳送大功率時適用。
5 MMC并聯結構母線直流電壓對橋臂電流的影響仿真分析 文獻[5]中指出,當前IGBT額定電流的典型值為1 500 A左右,上文中MMC并聯結構中的橋臂電流幅值為2 kA。在傳輸相同的功率時,提高直流母線電壓等級可以降低直流側電流,從而降低橋臂電流,使橋臂電流能夠與IGBT額定電流的典型值相匹配。根據船舶MVDC電力系統所列電壓等級,在2個MMC并聯的結構下,選取直流母線電壓為18 kV進行仿真。對MMC并聯結構中MMC1的a相上橋臂電流進行分析,并與母線電壓為10 kV時的結果對比,見圖12。從圖中可以看出,母線電壓為18 kV時,MMC1的a相上橋臂電流幅值為1 200 A,明顯小于母線電壓為10 kV時的2 000 A,并且跟IGBT額定電流典型值相比還有一定的裕度。endprint
因此,當船舶MVDC電力系統需要傳送大功率時,使用MMC并聯拓撲結構,并提高系統的直流母線電壓等級,能有效降低MMC橋臂承受的電流,避免MMC中的電子器件在極限條件下工作。
6 結 論
針對船舶中壓直流(MVDC)電力系統傳輸大功率時IGBT元件無法承受較大的橋臂電流問題,設計了合適的MMC并聯拓撲結構及其控制策略。在MATLAB/Simulink中,基于MMC并聯結構和MMC基本結構分別建立了MMC-MVDC系統模型。
選用直流母線為10 kV,對MMC兩種結構的仿真結果進行了對比分析。直流電壓仿真結果表明,MMC并聯結構能夠為環形直流母線提供穩定的電壓,電壓紋波符合要求,并且系統可以快速達到穩定狀態。MMC交、直流側電流及橋臂電流仿真結果表明,與MMC基本結構相比,在傳輸相同的功率時,MMC并聯結構橋臂電流減半。在MMC并聯結構下,將母線電壓為18 kV和10 kV時的MMC橋臂電流進行對比分析,發現MMC橋臂電流與MMC母線電壓有關,且等級越高,橋臂電流越低。
本文通過仿真驗證了MMC并聯結構在船舶MVDC電力大功率系統中的可行性,克服了IGBT元件無法承受大電流的障礙,為船舶MVDC電力系統整流提供了新的選擇。進一步的研究方向為:在MMC并聯拓撲結構下,船舶MVDC電力系統的穩態分析和直流阻抗模型分析。
參考文獻:
[1] JAVAID U, DUJIC D, van der MERWE W. MVDC marine electrical distribution: are we ready? [C]//Conference of the IEEE Industrial Electronics Society. Japan, IECON, 2015: 823-828. DOI: 10.1109/IECON.2015.7392201.
[2] CHEN Yu, ZHAO Shanshan, LI Zuoyu, et al. Modeling and control of the isolated DC-DC modular multilevel converter for electric ship medium voltage direct current (MVDC) power system[J]. IEEE Journal of Emerging & Selected Topics in Power Electronics, 2017, 5(1): 124-139. DOI: 10.1109/JESTPE.2016.2615071.
[3] STEUER M, SCHODER K, FARUQUE M O, et al. Multifunctional megawatt scale medium voltage DC test bed based on modular multilevel converter (MMC) technology[J]. IEEE Transactions on Transportation Electrification, 2016, 2(4): 597-606. DOI: 10.1109/TTE.2016.2582561.
[4] MO Ran, YE Qing, LI Hui. DC impedance modeling and stability analysis of modular multilevel converter for MVDC application[C]//2016 IEEE Energy Conversion Congress and Exposition. America: ECCE, 2016: 1-5. DOI: 10.1109/ECCE.2016.7854992.
[5] 許斌, 李程昊, 向往, 等. MMC 模塊化串并聯擴容方法及在能源互聯網中的應用[J]. 電力建設, 2015, 36(10): 20-26.
[6] ALI H, DOUGAL R, OUROUA A, et al. Cross-platform validation of notional baseline architecture models of naval electric ship power systems[C]//IEEE Electric Ship Technologies Symposium. American: ESTS, 2011: 78-83. DOI: 10.1109/ESTS.2011.5770845.
[7] LI Weilin, LUO Min, MONTI A, et al. Wavelet based method for fault detection in medium voltage DC shipboard power systems[C]//International Instrumentation and Measurement Technology Conference. Austria: IEEE, 2012: 2155-2160. DOI: 10. 1109 /I2MTC. 2012. 6229382.
[8] IEEE Industry Applications Society. IEEE recommended practice for 1 kV to 35 kV medium-voltage DC power systems on ships[S]. IEEE Standards Association, 2010: 1-54. DOI: 10.1109/IEEESTD.2010.5623440.
[9] 管敏淵. 基于模塊化多電平換流器的直流輸電系統控制策略研究[D]. 杭州: 浙江大學, 2013.
[10] 宋強, 饒宏. 柔性直流輸電換流器的分析與設計[M]. 北京: 清華大學出版社, 2015: 114-129.
[11] GAO Feng, NIU Decun, TIAN Hao, et al. Control of parallel-connected modular multilevel converters[J]. IEEE Transactions on Power Electronics, 2015, 30(1): 372-386. DOI: 10.1109/TPEL.2014.2313333.
[12] 徐政. 柔性直流輸電系統[M]. 北京: 機械工業出版社, 2012: 77-80.
[13] VECHALAPU K, BHATTACHARYA S. Modular multilevel converter based medium voltage DC amplifier for ship board power system[C]//International Symposium on Power Electronics for Distributed Generation Systems. Germany: PEDDG, 2015: 1-8. DOI: 10.1109/ PEDG. 2015.7223098.
[14] 李笑倩, 宋強, 劉文華, 等. 采用載波移相調制的模塊化多電平換流器電容電壓平衡控制[J]. 中國電機工程學報, 2012, 32(9): 49-55.
(編輯 趙勉)endprint
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30