基于機器視覺的車道保持輔助系統研究
2018-01-11 00:03:56趙文明張海文
數字技術與應用 2017年11期
趙文明+張海文
摘要:針對長時間駕駛疲勞、注意力渙散、行車偏移等問題,提出了一種基于機器視覺的車道保持輔助系統。利用透視變換將道路區域轉換為俯瞰模式,通過顏色特征和通道分離技術提取出大致車道線區域,使用線性擬合確定車道線的準確信息,并計算出車輛在車道線間的位置和車道線曲率,為安全行駛提供一定參考作用。
關鍵詞:車道保持;仿射變換;線性擬合
中圖分類號:TP391.4 文獻標識碼:A 文章編號:1007-9416(2017)11-0063-02
據交通部統計,約有50%的汽車交通事故是由偏離正常行駛車道造成的。主要原因有駕駛疲勞、情緒波動和注意力不集中等。另據統計,23%的汽車駕駛者有在方向盤上睡著的情況;66%的駕駛者在駕駛過程中會有打瞌睡的經歷。因此,車道保持輔助系統的研究具有重要的現實意義[1]。
本文提出了基于機器視覺的車道保持輔助系統,使用單攝像頭采集行駛道路圖像,然后將特定區域圖像轉化為俯瞰模式[2],通過顏色特征和顏色通道分離提取車道線,使用線性擬合確定其準確位置,并計算出車輛在車道線間的位置和車道線曲率,當車輛偏離車道一定距離時便發出預警,以提醒司機安全駕駛。
1 系統設計
1.1 實驗平臺搭建
在系統中,攝像頭安放到汽車前窗正中間,沿水平方向向下偏10度。系統的硬件開發環境為:主機一臺,CPU為CoreTM i5、主頻2.60GHz、內存8.00GB;USB攝像頭, 最大分辨率為1920*1080。軟件開發環境為:Windows操作系統;VS2013編程平臺;C++編程語言;OpenCV 圖像處理庫。
1.2 算法流程
車道保持輔助系統算法流程主要利用透視變換技術將特定區域圖像轉化為俯瞰圖,提取圖片顏色特征并進行顏色通道分離提取車道線,然后使用非線性擬合技術將車道線位置參數化,并計算車道線偏移距離和偏移角度,通過與閾值作對比,當車道偏移超過閾值便啟動預警。
2 數據處理
2.1 圖像序列的預處理
通過高斯濾波對圖像做平滑處理以抑制噪聲對圖像的影響,然后對攝像頭進行標定,計算相機校準矩陣和畸變系數,移除因攝像頭造成的圖像畸變。并以圖像左上角為坐標原點,軸垂直向下,軸水平向右建立坐標系。
3 實驗結果
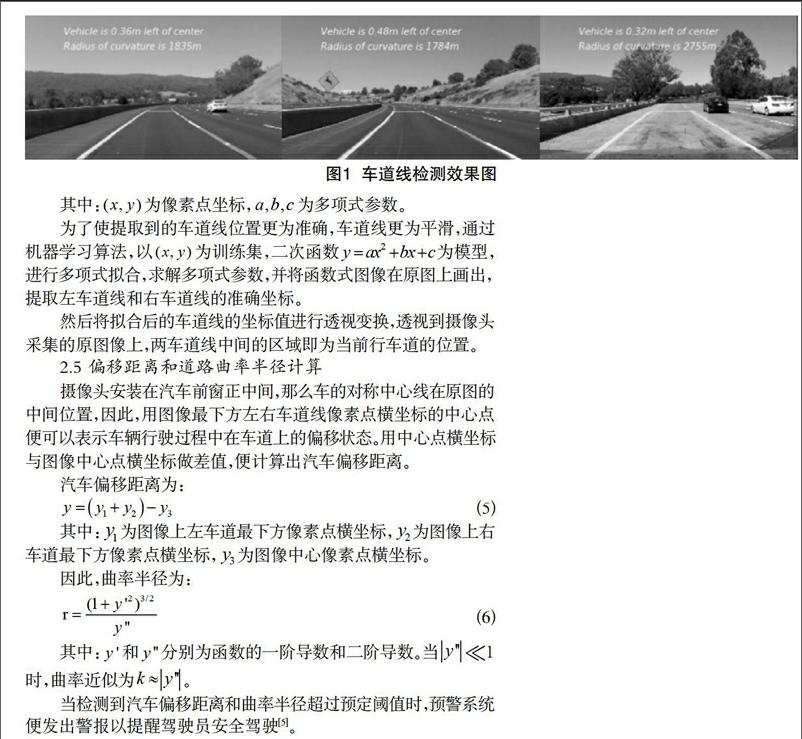
實驗采用C++編程實現,檢測效果用人工判定的方法。車道線檢測效果圖如圖1所示。
從圖中可以看出,在直線、實線和虛線車道線下檢測效果很好,并且在高亮、陰影等復雜環境下也取得了良好的檢測效果。可以說本方法相較于傳統檢測方法,檢測準確率有所提高,魯棒性和復雜環境適應性有很大的增強。
4 結語
針對長時間駕駛疲勞、注意力渙散等原因導致的行車偏移問題,本文采用圖像處理算法,實現了行車過程中的車道線自動檢測。實驗結果表明,通過將行車圖像轉化為俯瞰模式,然后通過顏色特征和通道分離技術可以有效的檢測出車道線,通過非線性擬合的方法將車道線參數化可以準確的求解出車道線偏移距離和曲率。本文提出的車道線檢測系統在復雜環境下能取得良好的效果,說明該系統方法較為可靠,可以為汽車的車道偏移預警、行車安全等提供一定的參考作用。
參考文獻
[1]張三林.基于機器視覺的嵌入式車道偏離預警系統的研究[D].湖南大學,2015.
[2]楊麗.基于機器視覺的車道安全預警算法的研究與實現[D].東北大學,2012.
[3]劉紫燕,祁佳,馮亮.數據融合方法在實時圖像邊緣檢測中的應用[J].儀表技術與傳感器,2014(7):88-89.
[4]李佳奇,趙文忠.幾種邊緣檢測算子在鐵路圖像中的應用[J].河西學院學報,2012,28(2):68-72.
[5]張吉穩.虛擬環境下基于駕駛行為分析的汽車駕駛安全預警研究[D].廣東工業大學,2010.
Abstract:Aiming at the problems of driving fatigue, lack of attention and driving deviation, a lane maintenance assistant system based on machine vision is proposed. The warp transformation is used to convert the road area into the overlooking mode, the color feature and channel separation technology are used to extract the general lane line area, The linear fitting is used to determine the exact information of the lane line, the vehicle position between lane line and line curvature are calculated , and a reference role is provided for safe driving.
Key Words:Lane keeping;Affine transformation;Linear fittingendprint
