模糊PID在伺服系統中的設計和仿真
2018-01-15 07:11:10王培
科學與財富 2017年21期
王培
摘要:伺服系統在各方面都有重要的應用,其中伺服系統也是非常重要的應用。然而隨著人們生活水平的提高和科學技術的發展,人們對伺服系統的要求越來越高,它指的是伺服系統的控制性能和控制精度。目前傳統的PID控制方法已不能達到理想的要求。所以本文主要研究模糊PID控制技術對控制系統的控制效果,論文以伺服系統的位置回路為主要研究對象,來說明位置控制回路如何讓伺服系統達到更高的精度,利用MATLAB的simulink軟件來仿真伺服系統的控制模型,通過得到的仿真圖像做前后對比分析,說明參數自整定模糊PID具有更好的暫態響應性能和穩態性能,以及對斜坡輸入和階躍輸入都具有很好的響應特性,達到對伺服系統最優的控制。
關鍵詞:伺服系統;PID控制;模糊PID;MATLAB仿真
一、模糊PID控制器的設計
各回路都采用不同的校正方法,各系統的特性也都可以因為傳遞函數的不同,系統的功能及特性不同。現選取單脈沖跟蹤回路進行控制對比,其他回路的仿真方法類似,將校正網絡改為PID控制化簡后的原理圖。對此位置回路進行仿真時使用以下規則整定:
(1)參數自整定規則
自整定PID控制器是以被控對象的輸出值與目標值的誤差e和誤差變化率ec作為系統的輸入,并用模糊推理的方法對PID的參數KP,KI,KD進行參數的整定,從而達到不同時刻的e和ec對PID參數整定的要求,達到期望的輸出值。利用模糊規則庫在線對PID參數進行修改和整定,便構成了自整定模糊PID控制器。
PID參數自整定的方法是找出PID控制器的三個參數KP,KI,lD,分別與e和ec之間的模糊關系,在系統的仿真中通過不斷地檢測e和ec的反饋值,根據模糊控制原理對3個參數進行在線修改調整,以滿足不同的e和ec值對控制參數的不同要求,使系統具有良好的動態性能和靜態性能。根據參數KP,KI和KD,和對系統輸出特性的影響,可得出在不同的e和ec時,參數的自整定原則:
(a)當lel較小時,為使系統具有較好的穩定性能,KP與KI的取值都應大些,同時為了防止系統在期望值附近出現振蕩,Kd值應根據|ec|的值確定,|ec|的值較大時,Kd取較小值,其他一般Kd值選中等大小。
(b)當lel的值中等大小時,為使系統響應具有較小的超調量,則KP應取較小值。此時系統,Kd的取值對系統響應的影響較明顯,Kd值的選取也要適中,Kd過大會使系統提前制動,從而延長調節時間。KI的取值要適當一些。
(c)當lel較大時,為使系統具有良好的跟蹤響應性能,應取較大的KP與較小的KD,同時為了防止系統響應出現較大的超調量,故應消除穩態誤差,可以取KI值為零。
根據伺服系統位置回路控制精度的要求,選取角度誤差|e|的基本論域為[0,1],選取角度誤差變化率的lecl的基本論域為[0,10],模糊變量的基本論域都為{0,1,2,3,4,5,6}。
(2)語言變量隸屬度函數的確定
設計的模糊PID控制器是兩輸入三輸出的控制形式,以誤差e和誤差變化率ec為輸入的語言變量;KP,KI和KD為輸出語言變量。輸入語言變量的語言值都取為“負大(NB)”,“負中(NM)”,“負小(NS)”,“零(ZO)”,“正小(Ps)”,“正中㈣Ⅵ)”,“正大(PB)”7種。輸出語言變量的語言值均取為“零(ZO)”、“正小(PS)”、“正中(PM)”、“正大(PB)”4種[9]。兩個輸入量的隸屬函數都選取三角形隸屬函數。
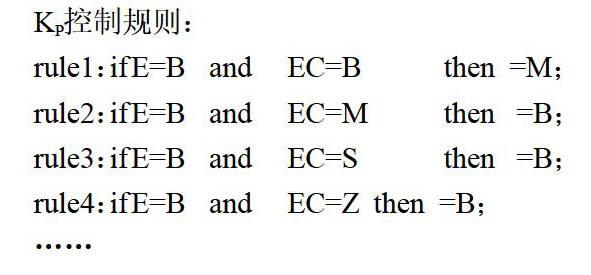
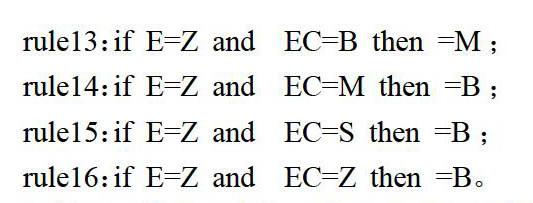
三個輸出量的基本論域應用經驗試湊法確定,KP的基本論域[0,0.1];Kl的基本論域[0,0.05];KD的基本論域[0,0.1]。輸出隸屬函數圖象與輸入隸屬函數的圖像時相似的,只是有不同的論域范圍。當把每個規則表都寫成條件語句分別各有16條語句,共有48條:
同樣KIKD的規則表也可表達成語言規則的形式,每一個參數有16條規則,所以共有48條規則,因此進行模糊推理與模糊運算,每一次推理需要12條規則,計算后轉到各自的論域范圍就得到Kp,Ki,Kd的精確值。
總結以上模糊控制器設計的主要步驟:
(1)選定模糊控制器的輸入輸出變量,一般取e、ec和u,本文u是指輸出Kp,Ki,Kd的值。
(2)確定各變量的模糊語言取值及相應的隸屬函數,即進行模糊化。模糊語言值通常選7個,例如取為{負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)}然后對所選取的模糊集定義其隸屬函數。
(3)建立模糊控制規則或控制算法,確定模糊推理和解模糊化方法。
(4)解模糊,得到Kp,Ki,Kd的調整值。
二、基于MATLAB的仿真分析
1、系統模型的仿真
設計模型控制系統的SIMULINK模型圖,與前面的構建仿真模型圖方法類似,在Simulink中依據模糊系統的“原理圖”,按下述步驟設計“仿真模型圖”。
第一步:設計模糊控制器的FIS結構文件;
第二步:設計模糊控制系統的仿真模型圖;
第三步:對系統進行仿真。
2、編輯設計模糊控制器
編輯名稱為“wm”的位置回路模糊控制系統FIS。
(1)在matlab主窗口中鍵入血zzy得出FIS編輯器界面。
(2)編輯“wm”的模糊控制規則。在編輯器界面上,順序單機菜單“edit”→“Rules”彈出“wm”的Rules編輯器。
3、仿真結果
參數自整定模糊PID伺服系統階躍響應跟蹤位置回路仿真模型按下列步驟進行仿真:
(1)調整信號源的有關參數:為階躍輸入:
(2)調出顯示器的顯示屏:雙擊Scope模塊;
(3)開始仿真:順序單擊菜單“simulation”—“star”。
模糊PID控制系統上升時間更短,超調量更小。而且模糊PID控制具有更好的響應性能,過渡過程很短,很快就能達到穩定。
三、結束語
所以由以上系統的仿真,可知應用模糊PID技術控制位置回路,進行參數的在線整定,能使系統達到了理想的精度。當然為了更全面的檢驗系統的穩態誤差,可以對于有一定速度的輸入信號,進行仿真和調試,檢查速度信號對系統的影響,調整合適的參數,達到理想的響應特性。筆者會在以后的學習中完善更多的知識,深入學習和研究。