液壓傳動型風力發(fā)電機組恒轉(zhuǎn)速研究
2018-01-18 04:33:12黨存祿
自動化與儀表 2017年9期
關(guān)鍵詞:發(fā)電機
黨存祿,石 晶
(蘭州理工大學 電氣工程與信息工程學院,蘭州 730050)
風力機是整個風電轉(zhuǎn)換系統(tǒng)中的關(guān)鍵部件[1]。當前主流機型以變槳距變速機組為主,需要復(fù)雜的變槳距系統(tǒng),機組的成本相對較高,系統(tǒng)可靠性降低。定槳距[2]風力機槳葉與輪轂直接剛性連接,當風速變化時,槳葉的槳距角不發(fā)生變化。定槳距型風力機利用失速性能良好的風力機槳葉,解決了機組在大風時的功率控制問題;葉尖擾流器成功地應(yīng)用在風力發(fā)電機組上,解決了在突甩負載情況下的安全停機問題。且憑借其結(jié)構(gòu)簡單,可靠性高的優(yōu)點,在近20年的風能開發(fā)利用中始終占據(jù)主導(dǎo)地位,被廣泛應(yīng)用。
液壓傳動風力發(fā)電機作為新一代風力發(fā)電設(shè)備[3],采用液壓柔性傳動裝置,解決塔架頂部設(shè)備、齒輪箱故障及維修問題,省去了傳統(tǒng)機型中齒輪箱、變流器等裝置,減少了塔架頂部設(shè)備的重量及裝機成本。
據(jù)風電行業(yè)人士介紹,德國有400 kW的液壓風電機組運行;美國、丹麥和挪威等國家正在研制階段,未有產(chǎn)品報道;國內(nèi)燕山大學的孔祥東教授團隊針對定量泵-變量馬達閉式系統(tǒng)[4],在實驗室完成系統(tǒng)工作機理研究,但主要是針對變槳距型液壓風力機。
本文以上述研究為基礎(chǔ),采用定槳距型液壓傳動風電機組,在槳距角固定的情況下,研究影響轉(zhuǎn)速的原因,要求發(fā)電機能夠?qū)崿F(xiàn)并網(wǎng),對轉(zhuǎn)速進行控制,使變量馬達以恒速運行,同步并網(wǎng)。
1 定槳距型風力機
由于沒有變槳功能,風力機從風中捕獲的功率表述為[5]

式中:Cp為風能利用系數(shù),Cp僅由葉尖速比λ決定,λ=ωR/v,ω 為風力機角速度;R 為葉片半徑;v為風速;ρ為氣流密度。
定槳距風力機輸出功率P曲線規(guī)律如圖1所示,圖中ω*為風力機最優(yōu)角速度,功率曲線只有一點具有最大功率Pmax,變化規(guī)律主要取決于Cp。
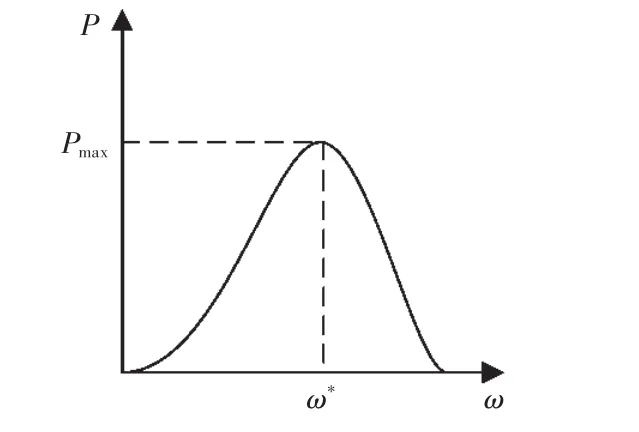
圖1 風力機輸出功率特性曲線Fig.1 Characteristic curve of output power of wind turbine
2 液壓傳動風力發(fā)電機組
2.1 液壓系統(tǒng)工作原理
液壓型風力發(fā)電機組主要包括主傳動系統(tǒng)、偏航系統(tǒng)及剎車安全系統(tǒng)等。
圖2為液壓型風力發(fā)電機組的主傳動系統(tǒng)示意。包括了風力機、定量泵-變量馬達液壓傳動、同步發(fā)電機和發(fā)電控制系統(tǒng)等。定量泵與風力機連接安裝在機艙里,風力機推動定量泵將風能轉(zhuǎn)換為液壓能。變量馬達與同步發(fā)電機安裝在地面上,液壓能傳輸?shù)阶兞狂R達處,驅(qū)動變量馬達轉(zhuǎn)動產(chǎn)生機械能,變量馬達穩(wěn)定輸出轉(zhuǎn)速,同步發(fā)電機并網(wǎng)[6]。
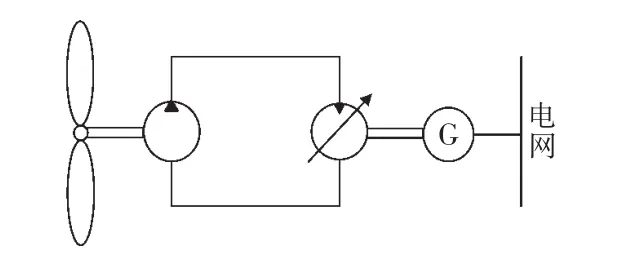
圖2 液壓型風力發(fā)電機組的主傳動系統(tǒng)示意Fig.2 Schematic diagram of main drive system of hydraulic wind turbine
2.2 主傳動數(shù)學模型
推導(dǎo)定量泵-變量馬達系統(tǒng)傳遞函數(shù)時,原理如圖3所示[7]。
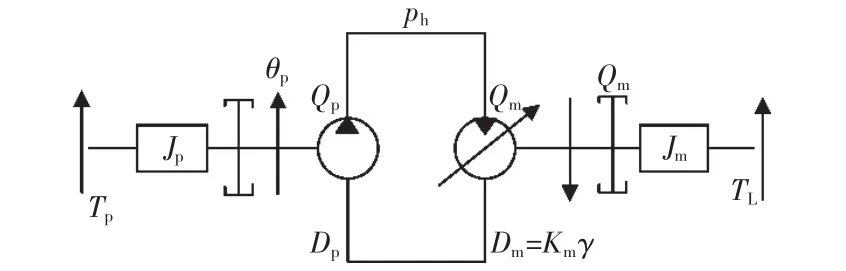
圖3 主傳動系統(tǒng)原理Fig.3 Schematic diagram of main drive system
定量泵流量方程為

式中:Qp為定量泵流量(m3/s);Dp為定量泵排量(m3/rad);ωp為定量泵的轉(zhuǎn)速(rad/s),Cip為定量泵內(nèi)泄露系數(shù)(m3/(s·Pa));Cep為定量泵外泄露系數(shù)(m3/(s·Pa));ph為高壓管路壓力(Pa);pl為低壓管路壓力(Pa)。
定量泵-變量馬達高壓腔流量連續(xù)方程為
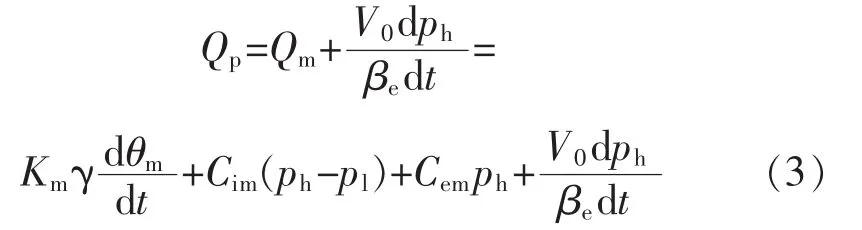
式中:Qm為變量馬達流量(m3/s);V0為高壓管路的總?cè)莘e(m3); βe為油液綜合體積彈性模量(Pa);Qm為變量馬達轉(zhuǎn)角(rad);Cim為變量馬達內(nèi)泄漏系數(shù)(m3/(s·Pa));Cem為變量馬達外泄漏系數(shù) (m3/(s·Pa));Qm為變量馬達的轉(zhuǎn)角(rad)。
變量馬達排量方程為

式中:Dm為變量馬達排量(m3/rad);Km為變量馬達排量梯度(m3/rad);γ為變量馬達擺角位置,取值區(qū)間[0,1]。
變量馬達轉(zhuǎn)速方程為

根據(jù)文獻對變量馬達轉(zhuǎn)角θm的推導(dǎo)公式,可知變量馬達轉(zhuǎn)速對斜盤位置傳遞函數(shù)進行拉氏變換為
式中:ωhm為變量馬達轉(zhuǎn)速回路固有頻率;ξhm為變量馬達轉(zhuǎn)速回路阻尼比。由于變量γ與乘積成非線性,將其線性化處理得:

忽略高階無窮小量得:

式中:γ0為變量馬達擺角初始值;Δγ(t)為變量馬達的擺角變化值;ωm0為變量馬達初始的轉(zhuǎn)速(rad/s);Δωm(t)為變量馬達的轉(zhuǎn)速變化值(rad/s)。
變量馬達輸出功率傳遞函數(shù)為

2.3 液壓傳動風力發(fā)電機組控制原理
實現(xiàn)同步并網(wǎng)的要求[8]:①發(fā)電機端電壓大小等于電網(wǎng)電壓;②發(fā)電機頻率與電網(wǎng)頻率一致;③并網(wǎng)合閘時,發(fā)電機與電網(wǎng)回路電勢為零;④發(fā)電機相序與電網(wǎng)相序一致;⑤發(fā)電機電壓波形與電網(wǎng)電壓波形相同。條件④和條件⑤在發(fā)電機設(shè)備選型和制造時已得到了保證。
由上述公式分析可知,風速大小影響了定量泵輸出的流量和壓力,風速越大,定量泵轉(zhuǎn)速越高,流量和壓力越大;定量泵和變量馬達在一個閉環(huán)管路上,變量馬達的開度由斜盤控制器控制,主要控制閉環(huán)管路中的流量,斜盤控制角越大,流量越大,變量馬達轉(zhuǎn)換的功率越大;變量馬達和同步發(fā)電機同軸聯(lián)接,將變量馬達吸收的功率轉(zhuǎn)換為電功率,吸收的越多,發(fā)電機輸出的電功率越大;發(fā)電機輸出電壓大小由同步發(fā)電機的勵磁電流決定;發(fā)電機的頻率由轉(zhuǎn)速決定。
3 液壓型機組轉(zhuǎn)速功率控制方法
由上述分析可知,當定量泵流量為常值時,系統(tǒng)壓力不變,只有變量馬達是變量,改變變量馬達的排量,輸出轉(zhuǎn)速與馬達排量成反比。定量泵轉(zhuǎn)速隨著風速不斷變化輸出不同流量時,變量馬達產(chǎn)生不同轉(zhuǎn)速。按照同步并網(wǎng)要求,需要頻率一定,即需控制馬達轉(zhuǎn)速恒定不變,同步輸出。由式(1)、式(2)知,通過改變馬達的斜盤角度可實現(xiàn)。即輸出轉(zhuǎn)速高低由斜盤控制角決定,輸出轉(zhuǎn)速高,說明控制角偏大,需要調(diào)小,反之亦然。
泵轉(zhuǎn)速變化時,對同一馬達轉(zhuǎn)速對應(yīng)不同變量馬達擺角γ,由式(6)知馬達擺角γ與馬達擺角初始值γ0和擺角變化值Δγ有關(guān)。不同的擺角γ變化時對轉(zhuǎn)速和功率都有影響,采用圖4所示液壓型機組轉(zhuǎn)速功率閉環(huán)控制方法[9],通過反推理方式,間接用控制器控制斜盤角來控制變量馬達轉(zhuǎn)速和功率。
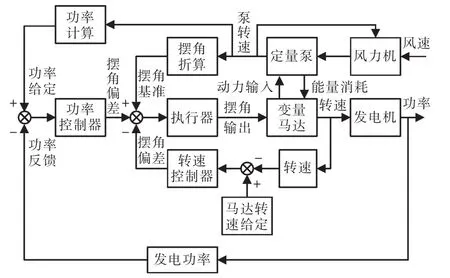
圖4 液壓型機組轉(zhuǎn)速功率閉環(huán)控制方法Fig.4 Speed and power closed loop control method of hydraulic unit
在不斷變化風速下,轉(zhuǎn)速偏差經(jīng)控制器得到擺角變化值Δγ形成馬達擺角微調(diào)量,需要選定的馬達初始值γ0接近工作要求,使其能在小范圍內(nèi)變化。此時若選定一固定的馬達初始值γ0,可能造成Δγ變化過大,無法達到穩(wěn)定調(diào)節(jié)。則需檢測定量泵輸入轉(zhuǎn)速,按流量匹配原則計算所得初始值γ0,作為馬達達到工作范圍要求的初始輸出轉(zhuǎn)速擺角值,γ0-Δγ作為變量馬達擺角控制值。
控制系統(tǒng)設(shè)計的核心內(nèi)容是控制器的選擇及參數(shù)的調(diào)節(jié),在研究的液壓傳動型風力發(fā)電機組系統(tǒng)中存在非線性,采用PID調(diào)節(jié)所研究的是線性化后的系統(tǒng)模型,且動態(tài)性能和穩(wěn)定性兼顧麻煩,存在矛盾。
因此,采用模糊PID控制方法[10],結(jié)合傳統(tǒng)PID控制器及模糊控制器優(yōu)點進行優(yōu)化控制。其利用模糊控制器靈活、快速的特點和PID控制器使用的方便性、魯棒性等特點,使其可靠性和性價比更高,易于掌握。
4 控制系統(tǒng)仿真
通過某風力發(fā)電機組生產(chǎn)廠家提供真實風力機數(shù)據(jù),實施600 kW風力機組主傳動液壓系統(tǒng)為研究對象。變量馬達參數(shù)為排量1000 mL/r,最高壓力42 MPa,馬達輸出轉(zhuǎn)速初值為1500 r/min,采用相似理論確定計算其它實驗數(shù)據(jù)。
根據(jù)數(shù)學模型和控制原理框圖,利用Matlab/Simulink軟件對系統(tǒng)進行仿真。定量泵取一個階躍信號400~410 r/min,通過模糊PID不斷調(diào)節(jié)參數(shù),變量馬達擺角仿真曲線如圖5所示。
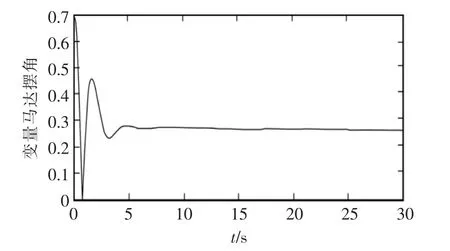
圖5 變量馬達擺角仿真曲線Fig.5 Simulation curve of swing angle of variable motor
通過控制器對馬達擺角的閉環(huán)調(diào)節(jié)控制,變量馬達轉(zhuǎn)速的恒定輸出仿真如圖6所示。可知馬達輸出恒定轉(zhuǎn)速能夠使頻率保持恒定,符合同步并網(wǎng)要求,即對速度影響因素分析控制方法完全可用。
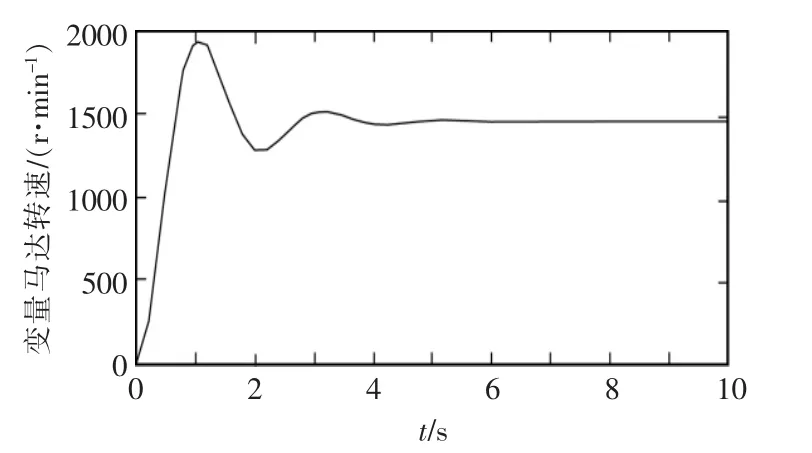
圖6 變量馬達轉(zhuǎn)速仿真曲線Fig.6 Simulation curve of variable motor speed
5 結(jié)語
本文主要介紹了液壓型風力發(fā)電機區(qū)別于傳統(tǒng)風力機的優(yōu)點。用液壓柔性傳動代替了機械剛性傳動,減少了機組的機械故障率,降低了制造和維護成本。選用定槳距機組,機組在整個風速運行范圍里實現(xiàn)與變槳距變速風力機相媲美的功率特性。針對變量馬達恒速運行問題進行分析,通過間接控制馬達擺角變化實現(xiàn)了對變量馬達速度的恒定控制。由于試驗設(shè)備不足,沒有進行試驗驗證,存在不足。
[1]Abdul Motim Howlader,Naomitsu Urasaki,Kousuke Uchida,et al.Parameter identification of wind turbine for maximum powerpoint tracking control[J].Electric Power Components and Systems,2010(38):603-614.
[2]胡祖榮.定槳距變速風力發(fā)電機組的變速控制技術(shù)研究 [D].江蘇:南京航空航天大學,2010.
[3]Gruet R.The European Wind Energy Association.Wind energy and EU climate policy[R/OL].Print:www.artoos.be.2011:6-8.
[3]艾超,孔祥東,陳文婷,等.液壓型風力發(fā)電機組主傳動系統(tǒng)穩(wěn)速控制研究[J].太陽能學報,2014,35(9):1757-1763.
[4]賴日新.定槳距變速風力發(fā)電機組的控制技術(shù)研究及其仿真[D].江蘇:南京航空航天大學,2009.
[5]Johannes Schmitz,Nils Vatheuer,Hubertus Murrenhoff.Hydrostatic drive train in wind energy plants[J].Drive Train Components and Power Electronics,2011:1-8.
[6]艾超,閆桂山.液壓型風力發(fā)電機組最優(yōu)功率追蹤控制方法研究[J].動力工程學報,2015,35(2):126-132.
[7]張剛.液壓型風力發(fā)電機組主傳動系統(tǒng)功率控制研究[D].河北:燕山大學,2012.
[8]艾超.液壓型風力發(fā)電機組轉(zhuǎn)速控制和功率控制研究[D].河北:燕山大學,2012.
[9]張高峰.液壓傳動型風力發(fā)電系統(tǒng)馬達轉(zhuǎn)速特性研究[D].遼寧:大連理工大學,2012.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(shù)(2014年6期)2014-09-26 12:07:48
水電站機電技術(shù)(2014年1期)2014-09-26 11:59:45
