基于MC9S12XEP100的純電動物流車整車控制器設計
2018-01-18 04:33:56韓愛國
自動化與儀表 2017年9期
韓愛國,王 萌
(武漢理工大學 現代汽車零部件技術湖北省重點試驗室 汽車零部件技術湖北省協同創新中心,武漢 430070)
隨著日益嚴重的環境污染和能源短缺,大力發展新能源汽車已成為未來汽車發展的必然趨勢[1]。在全國物流業不斷發展的今天,物流車具有廣大的市場潛力,純電動物流車因其低能耗、零排放等特點將在日益發展的城市交通中占據一席之地[2]。整車控制器在協調汽車各部件工作中具有重要作用,通過對各傳感器信號的采集,實時監測整車狀態,并通過CAN總線與電池管理系統、電機控制器、儀表顯示等設備通信。具有綜合管理、完成車輛驅動、信息監測、故障處理等功能,是實現純電動汽車高效可靠運行的必要保障[3]。整車控制策略作為整車控制器的軟件部分,是整車控制器開發的核心。本文對某款純電動物流車的整車控制器進行了設計并驗證了其可行性和有效性。
1 純電動物流車動力系統構成
純電動物流車動力系統結構主要包括整車控制器、電池系統、電機系統、高壓配電柜及電機直驅主減速器[4],如圖1所示。電池系統中的電池管理系統是實現動力蓄電池狀態監控及安全保護的關鍵部件;電機系統中的電機控制器通過控制電機將電能轉化為驅動車輛的動能或將車輛的動能轉化為電能回收;高壓配電柜主要將動力電池的電源分配給各用電系統,包括電機系統及附件子系統。
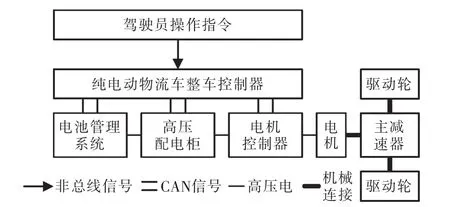
圖1 整車動力系統構成Fig.1 Structure of vehicle control system
2 純電動物流車整車控制器硬件設計
硬件系統是整車控制策略、網絡通信、驅動運算、調試標定等功能的載體[5]。
2.1 整車控制器核心器件選擇
整車控制器的核心控制芯片采用飛思卡爾16位高性能微控制器MC9S12XEP100,專為汽車控制設計,工作溫度范圍寬,可靠性高,具有較強的運算能力,保證了系統的實時性。它能夠采集各傳感器信號,與電機控制器、電池管理系統、儀表等進行通信,實現整車控制。該控制器具有32 KB內部RAM,512 KB片內Flash存儲器,4 KB內部E2PROM和32 KB片內D-Flash存儲器,4路MSCAN外設用于CAN總線,2 個 12 b A/D,6 路 SCI,3 路 SPI總線,2 路I2C總線,總線時鐘最高可達40 MHz。
整車控制器采用12 V電壓平臺,工作電壓范圍為6 V~36 V,并可通過硬件配置兼容24 V平臺。整車控制器設計有4路模擬輸入通道、18路數字開關輸入通道、4路頻率量輸出通道、3路CAN通信接口、8路高邊驅動、8路低邊驅動和5 V外部傳感器供電輸出。整車電氣原理如圖2所示。

圖2 整車電氣原理Fig.2 Electric schematic diagram of vehicle
整車控制器元器件幾乎全部采用汽車級器件,工作溫度范圍-40℃~85℃,具備汽車級標準。
2.2 硬件布局設計
整車控制器在設計時除了要注意原理圖的設計滿足功能要求,在PCB(印刷電路板)設計上也要進行特殊處理,以達到高可靠性和較強的機械及電磁防護水平。
整車控制器采用4層電路板設計,頂層和底層是器件布局和走線層,中間2層是電源層和地層。其中頂層和底層進行了加厚鋪銅設計,以保證大電流通過能力,并增強了散熱能力。此外,在接口上,整車控制器在板端輸入和輸出端子入口處都設計了瞬態抑制二極管和電磁干擾濾波器件,防止電磁干擾并盡可能靠近外部接口。接口電容電阻耐壓值大于等于50 V,保證了接口容阻器件的可靠。最后,對于電路板電磁兼容設計,PCB四周采用過孔連接頂層、底層及中間2層的地線構成地墻,裝配后處于外殼接縫處,可以阻隔溢出和滲入的電磁波。在頂層電路板的阻焊層添加裸露圍邊,與金屬外殼裝配時連接在一起,將地墻地線和外殼地線短接,增強電磁防護。
3 純電動物流車整車控制策略設計
純電動物流車整車控制策略分為驅動控制策略和故障處理策略。驅動控制策略主要根據駕駛員操作、整車運行狀態判斷駕駛員意圖,計算電機需求扭矩;故障診斷及處理主要是對整車控制相關故障進行檢測并對驅動控制所確定的需求扭矩進行修正調節,保證行車安全。
3.1 整車控制策略總體架構
整車控制策略總體架構如圖3所示,分為上下電控制、爬行模式、行車模式、制動能量回收模式、跛行模式、倒車模式、故障處理[6]。
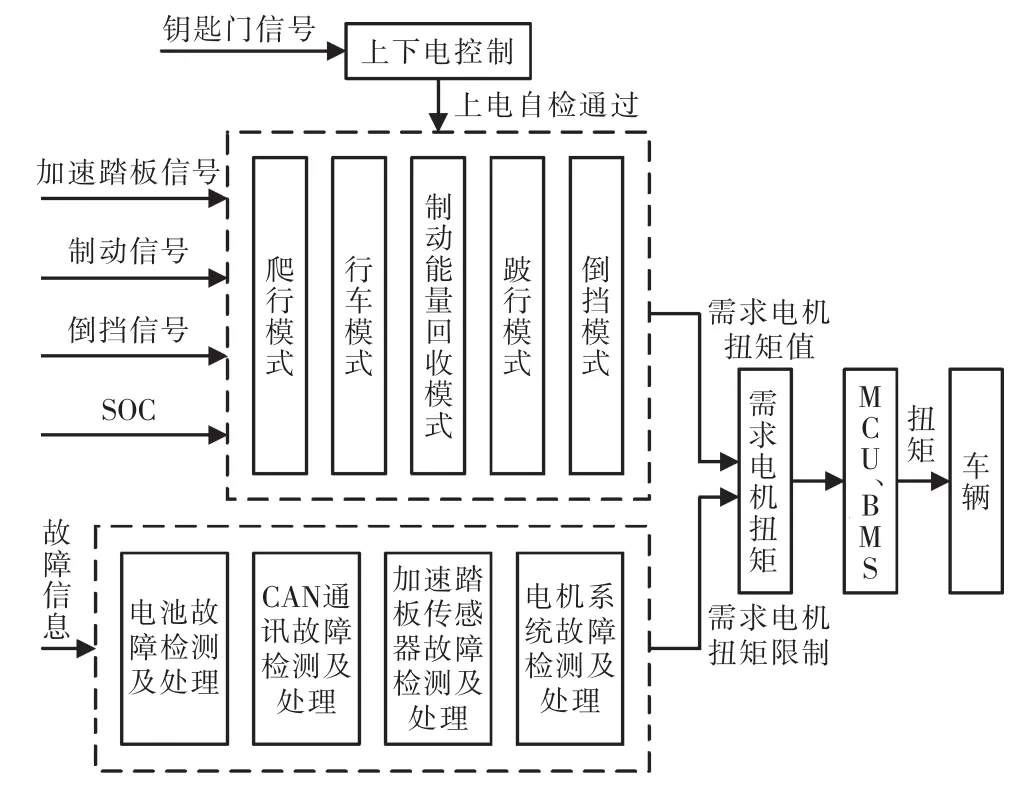
圖3 整車控制策略總體架構Fig.3 Overall architecture of the vehicle control strategy
上下電控制基于鑰匙門位置設置,實現系統初始化、自檢、充電狀態判斷等功能。
爬行模式鑰匙門接到通電狀態,檔位掛在驅動檔,整車控制器檢測到加速踏板的開度為零,電機根據目標轉矩指令對驅動系統輸出轉矩使電動汽車由靜止狀態行駛至某一較低車速的過程。
行車模式電池的SOC值大于30%,電機、動力電池無故障,若制動信號為零,加速踏板信號不為零,進入行車模式。
制動能量回收模式制動信號不為零,電池的SOC值小于90%,電機的轉速大于門限轉速,進入制動能量回收模式。
跛行模式電池SOC介于20%與30%之間,若制動信號為零,加速踏板信號不為零,則進入跛行模式。
倒車模式倒擋信號不為零,制動信號和加速踏板信號均不為零,則進入倒車模式。
故障處理故障處理分為行車前系統自檢及行車過程中的故障診斷及處理。整車上電結束,高壓主繼電器吸合,完成系統各部件故障狀態檢測,如無故障系統進入READY狀態,指示可以進行正常駕駛操作,否則禁止行車,直至故障消除。若行車過程出現故障,則根據故障處理中相應控制策略進行限功率運行,故障等級較高時不允許行車。
3.2 加速踏板解析策略
純電動汽車在實際行駛中,當駕駛員踩下加速踏板,車輛會進入正常行駛模式。駕駛員對車輛驅動力矩的需求體現在加速踏板開度變化上。在加速踏板全開時,為保證汽車具有最大動力性,電機轉矩負荷系數為100%,在加速踏板為零時,電機不輸出動力,電機轉矩負荷系數為零。中間的對應關系則體現了該車對加速踏板的解析策略。有3種踏板解析策略[7],如圖4所示。A策略動力性較好,C策略經濟性較好,B策略為線性策略,函數關系簡單,容易實現,且能較真實地反應駕駛員需求。考慮到整車駕駛的動力性和舒適性,加速踏板解析策略選擇B曲線,即相同轉速下扭矩隨加速踏板開度線性增加。

圖4 加速踏板解析策略Fig.4 Resolution strategy of accelerator pedal
3.3 制動能量回收控制策略
與傳統燃油車相比,電動汽車能夠實現制動能量回收功能。當整車處于制動狀態時進行制動能量回收控制,電機轉速很低時回收效率低,不回收能量,且為了保護動力電池,SOC過高時為防止電池過充取消電機再生制動。設計一個電機轉速門限值和SOC最大值,低于該門限轉速或高于SOC值最大值停止能量回收,否則電機以一定的回饋扭矩進行能量回收,制動能量回收的控制策略如圖5所示。
3.4 故障診斷及處理策略
VCU對MCU、BMS故障的處理策略:1級故障時,直接進入停機模式,控制電機零扭矩,禁止電機使能;2級故障時,功率限制模塊根據MCU、BMS分別發送允許最大驅動、制動功率進行限功率處理。具體的故障描述、相應的診斷及處理策略,如表1所示。

圖5 制動踏板控制策略程序流程Fig.5 Program flow chart of brake pedal control strategy
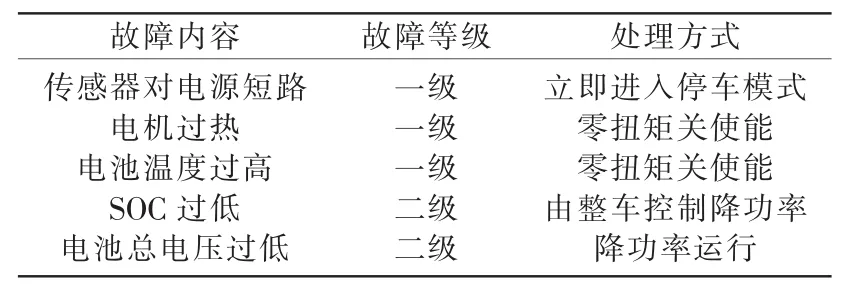
表1 純電動物流車故障診斷與處理策略Tab.1 Fault diagnosis and treatment strategy of pure electric logistic vehicle
4 模擬車輛行駛性能驗證
整車控制器控制策略的設計思想是基于扭矩控制,實現加減速扭矩控制、制動能量回收、驅動扭矩的限制等功能。硬件電路分別用來模擬數字量、模擬量輸入模塊。將已開發的控制策略軟件刷寫至整車控制器硬件上,結合硬件電路模擬信號在標定系統中進行車輛行車模式的試驗。當車輛完成上電模式后,指示燈點亮,車輛進入行車模式。
4.1 CAN通信網絡測試
VCU通過CAN總線獲得電機和電池組信息,結合采集到的駕駛員操作指令通過控制策略給MCU和BMS相應命令,實現車輛行駛功能。試驗設計了純電動物流車的通信協議,采用擴展幀、29位標識符格式,對各節點優先級、數據域進行了規定[8]。圖6給出了CAN總線對報文的接收與發送測試。
4.2 行車模式模擬驗證
本試驗使用ECKA V2標定工具對開發的整車控制器控制策略進行了標定試驗。
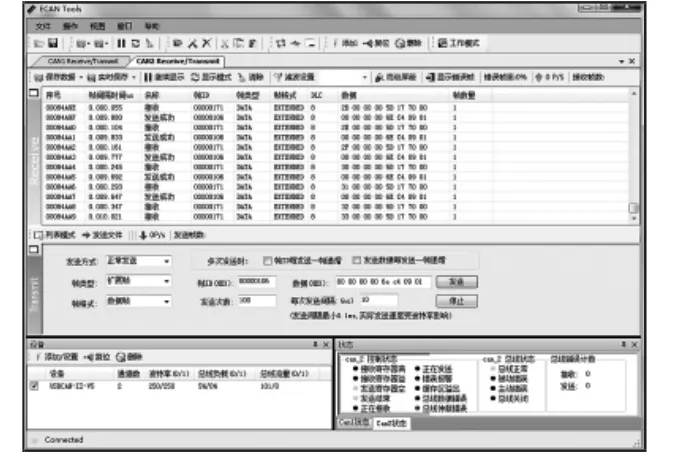
圖6 報文的接收與發送Fig.6 Sending and receiving of message
圖7給出了純電動物流車行駛性能曲線。圖8給出了在車輛行駛中電池SOC和電池總電壓降低時對輸出扭矩限值的曲線。

圖7 純電動物流車行駛性能曲線Fig.7 Curve of pure electric logistic vehicle driving
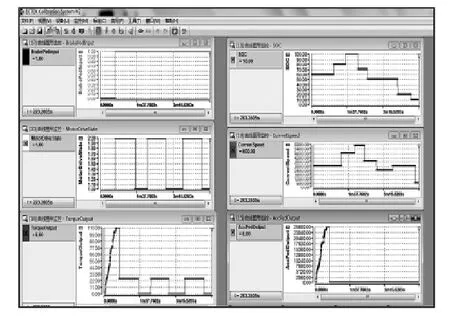
圖8 電池SOC、總電壓值變化時汽車行駛性能曲線Fig.8 Vehicle performance curve of SOC and total voltage
從圖7可以看出,在加速度段,輸出扭轉隨加速踏板開度增加而增加;踩下制動踏板,加速踏板信號為零且不再隨加速踏板模擬量的變化而變化,VCU通過CAN總線接收到的電機當前轉速值和SOC值判斷是否進行能量回收,若滿足制動能量回收條件此時給定電機回饋扭矩,電機驅動狀態為發電狀態;否則電機扭矩輸出為零。從圖8可以看出,該策略是為了最大限度地保護電池及整車功能的安全運行。通過SOC值和電池組總電壓值在汽車行駛過程中的變化條件診斷出BMS故障后,進入限扭矩模式,此時,即使加速踏板的模擬量增加到最大,輸出扭矩也不會超出對應的限制扭矩,實現了故障診斷處理的控制策略。
試驗表明,整車控制策略能準確解析駕駛員意圖、進行制動能量回收、輕微故障時能及時實施限功率保護,實現預期功能。
5 結語
純電動物流車整車控制系統是以VCU為核心,結合BMS、MCU及充電系統組成的一套完整的電控系統。本文提出的VCU控制策略包括對整車CAN通信管理、工作模式判別、驅動控制及故障診斷處理。根據硬件電路設計和標定系統模擬了車輛在行駛過程中扭矩隨加速踏板變化曲線;在制動時進行制動能量回收;同時還實現了實時診斷并在輕微故障時進行限扭矩輸出。整車控制策略的設計滿足了汽車動力性、經濟性及安全性的需求。接下來需進一步完善控制策略,進行道路實車試驗。
[1]楊春龍,楊世文.純電動環衛車整車控制器開發[J].車輛與動力技術,2013(2):4-6.
[2]劉果,牛志剛.純電動物流車制動力分配的建模與仿真[J].機械設計與制造,2016(8):73-76.
[3]朱軍.新能源汽車動力系統控制原理及應用[M].上海:上海科學技術出版社,2013.
[4]劉永山.純電動汽車整車控制器開發及控制策略研究[D].武漢:武漢理工大學,2014.
[5]Bai S,Huang J,Shi C,et al.Design and application of vehicle control unit for an electric light-truck[J].Application of Electronic Technique,2016(42):67-70.
[6]戴能紅,姜朋昌,孫飛,等.純電動客車整車控制策略設計與驗證[J].汽車工程師,2015(11):31-33.
[7]朱曉琪.純電動汽車整車控制器開發[D].吉林:吉林大學,2015.
[8]Yongzhong Li,Xinjie Ji.Controller design for ISG hybrid electric vehicle based on SAE J1939 protocol[J].Applied Mechanics and Materials,2013(347):869-872.
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
能源工程(2020年6期)2021-01-26 00:55:22
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
物流技術與應用(2019年8期)2019-09-04 03:29:56
山東冶金(2019年3期)2019-07-10 00:54:04
汽車觀察(2018年12期)2018-12-26 01:05:44
消費導刊(2018年10期)2018-08-20 02:57:02
黃河之聲(2017年13期)2017-01-28 13:30:17
通信電源技術(2016年1期)2016-04-16 04:57:26
