家用智能綠柜系統的設計與實現
2018-01-20 06:42:04錢月霞楊保華
電腦知識與技術 2018年31期
錢月霞 楊保華

摘要:隨著信息時代的飛速發展和人工智能的應運而起,智能家居在家庭生活中飾演著極其重要的角色。該文設計的是家用植物綠柜智能控制系統,其中包括STM32 CPU、數據采集模塊、無線通信模塊等。通過將數據采集模塊采集到的數據輸入 STM32 CPU,再利用無線通信模塊把數據傳送給云端服務器,最終實現系統的遠程監測控制功能。
關鍵詞:智能綠柜;STM32;監測
中圖分類號:TP311? ? ? 文獻標識碼:A? ? ? 文章編號:1009-3044(2018)31-0078-02
Development of Household Intelligent Green Cabinet System
QIAN Yue-xia, YANG Bao-hua
(School of Information, Changzhou Vocational Institute of Mechatronic Technology, Changzhou 213164, China)
Abstract: With the development of information age and artificial intelligence, smart home plays an extremely important role in family life. The intelligent control system of household plant green cabinet is designed in this paper, including STM32 CPU, data acquisition module, and wireless communication module and so on. Inputting the data collected by the data acquisition module into STM32 CPU, and then transferring the data to the cloud server by the wireless communication module, the remote control function of the system is realized finally.
Key words: Intelligent plant cabinet system; STM32; Monitor
1 緒論
從國內市場層面來看,隨著生活水平和審美情趣的提高,幾乎每家每戶都有這種家用植物的種植需求。
本文研究家用植物綠柜遠程智能控制系統,合理地將互聯網、智能手機設備和智能控制以及家居植物種植完美結合起來,實現家用植物種植的智能化。它能夠對植物成長的環境進行本地監測和智能調控,也可以采用手機APP對其實現遠程監測和智能調控。
2 系統分析
2.1 系統功能
1) 參數監測功能:可檢測包含空氣、土壤濕度、PM2.5等參數;
2) 手動控制功能:用戶可以通過本地人機交互顯示觸摸屏和遠程手機APP實現手動澆灌、補光、加濕、通風、空氣凈化控制;
3) 智能控制功能:按照預先設定的控制策略,自動進行澆灌、補光、加濕等操作,調節植物生長環境;
4) 報警提示功能:當水位、PM2.5等參數異常時,提示報警信息;
5) 遠程通信功能:主控板通過無線WiFi 網絡和云端服務器通信,確保手機APP遠程監測和控制的正常。
2.2 系統總體方案
家用植物綠柜遠程智能控制系統總體結構方案如圖1所示,它包括了本地端控制器、云端服務器和智能手機移動端設備三大組成部分。其中,本地端控制器負責顯示出植物生長環境的各類參數以及供用戶進行本地觸控操作,同時還與遠程手機端進行數據交換協同控制植物的生長環境。本地端控制器通過無線WiFi網絡與云端服務器保持實時連接;云端服務器是基于Apache Mina框架構建的,它可以穩定的為本地控制器和移動端設備同步數據提供通信服務;遠方的移動手機APP端可以通過云端服務器的連接與本地控制器交換數據,最終實現遠程的參數顯示與生長環境改善操控。
3 系統硬件電路設計
系統硬件電路包括CPU模塊、電源模塊、傳感器模塊(溫濕度傳感器、光強傳感器、PM2.5傳感器和甲醛傳感器)、輸出控制模塊、人機交互觸控模塊、無線通信模塊、EEPROM存儲模塊組成,下面以CPU模塊和無線通信模塊為例。
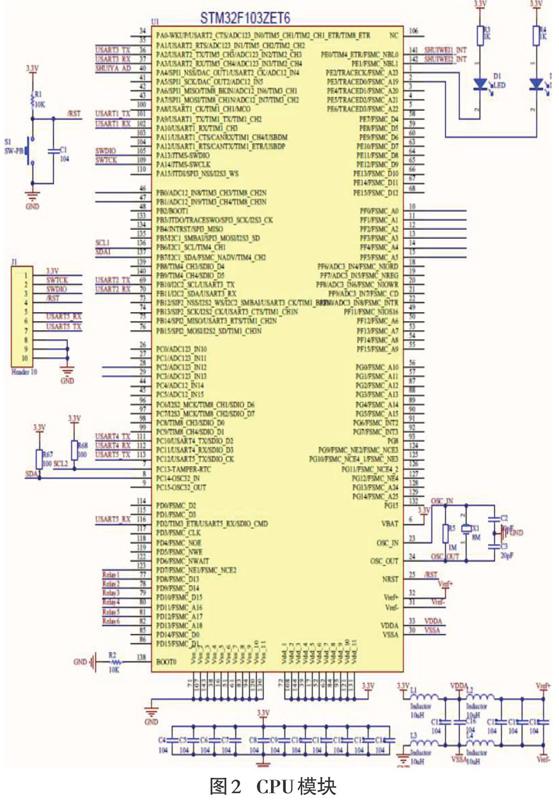
1) CPU模塊:考慮到本系統所涉及的傳感器等硬件較多,需要較多的串口、GPIO等片上外設資源,本系統的CPU采用了STM32F103ZET6處理器,如圖2所示。結合S1按鍵復位、外部8MHz晶振、電容電感濾波、wifi指示燈等組成了CPU核心處理模塊。
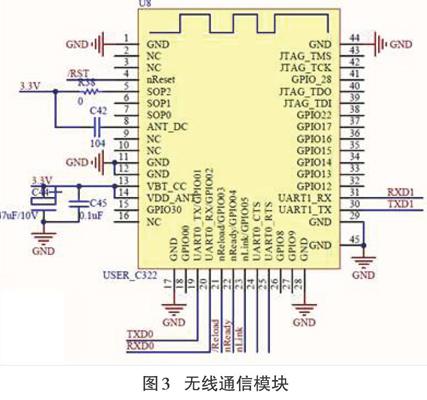
2) 無線通信模塊
系統的無線Wifi通信模塊采用的是USR-C322,可同時支持AP和STA兩種工作模式。當把它配置在STA工作模式時,能夠將本地控制器端通過串口發出的AT命令傳輸到Wifi網絡上,最終完成本地控制器和云端服務器的數據通信功能,如圖3所示。模塊與主控芯片STM32的USART2相連,通過AT命令配置模塊工作方式。S1是模塊復位重啟按鍵,兩個led燈D3分別是“模塊準備好”和“連接正常”指示燈。
4 系統軟件程序開發
通過RVMDK系統進行開發,主要是對涉及傳感器、迪文屏、網絡模塊等的片上GPIO等外設進行底層功能配置。DRIVER項目文件夾內代表功能驅動層,里面是用戶自編外部傳感器、液晶屏等接口驅動文件,封裝了用戶自編的各個傳感器參數檢測、迪文屏串口數據幀通信等函數,方便應用層調用。NETWORK項目文件夾代表網絡驅動層,里面是網絡Wifi模塊的網絡連接驅動文件,里面封裝了用戶自編的串口Wifi透傳模塊USR-C322的網絡連接配置等函數。APP項目文件夾內代表應用層,里面是用戶自編應用程序,包含主函數等用戶應用層應用程序,是系統各個控制策略最終實現之所在。由于本系統是一個綜合項目,功能較其他系統相對復雜,代碼量也相對較大,受篇幅所限,不將代碼展示。
5 系統整體測試
系統測試階段是檢驗系統功能是否達標以及發現系統存在的潛在問題的重要階段。本系統的測試分為模塊測試階段和系統整機聯機調試階段兩個部分。如圖4所示,系統整機運行后,可以對植物生長的環境參數進行本地檢測顯示以及智能操控,同樣可以通過位于遠方的手機APP對植物生長環境進行遠程檢測顯示和手動智能調整。
6 小結
本文設計了一套家用植物綠柜遠程智能控制系統,可以實 (下轉第95頁)
(上接第79頁)
現本地控制和手機APP來遠程兩種控制方式,采用自動工作方式檢查植物生長環境的各項參數指標,自動進行改善環境操作。采用了STM32內部GPIO、TIMER、中斷、USART串口、I2C總線等片上外設,對系統控制程序進行分層,分別編寫了基于STM32F103ZET6芯片的本地端BSP板級驅動層、DRIVER功能驅動層、NETWORK網絡驅動層和APP應用層程序,最后進行了聯合調試。
參考文獻:
[1] 徐登,周漢清,余宏.家用植物種植遠程智能控制系統設計[J].常州信息職業技術學院學報,2017,16(2):19-24.
[2] 李云樂,程升.日本設施蔬菜產業發展經驗對我國的啟示[J].中國園藝文摘,2017(6):15-68.
[3] 李振杰,李軍.基于GSM控制的家庭綠色植物灌溉系統設計與實現[J].赤峰學院學報:自然科學版,2017,33(3):19-21.
