
基于神經網絡的假肢無線控制系統的設計
2018-01-22 00:35:55彭子韜許鵬沈曉燕吳芳
現代電子技術 2018年2期
關鍵詞:模式識別
彭子韜+許鵬+沈曉燕+吳芳

摘 要: 為了改善殘疾人生活水平和促進醫療事業發展,提出一種基于神經網絡的假肢無線控制系統設計方案。該系統以STM32為核心芯片,通過采集上肢肱二頭肌、肱三頭肌、指淺屈肌、指伸肌4塊肌肉的肌電信號,使用BP神經網絡與SOFM神經網絡相結合對肌電信號進行模式識別,實時控制肌電假肢的完成伸臂、屈臂、腕內旋、腕外旋、握拳、張手6種動作行為。實驗結果表明,該系統對6種動作的整體識別率可達97%,并且采用無線實時的控制方式,能夠更方便地幫助部分肢體殘疾患者完成這些基本的操作行為。
關鍵詞: 神經網絡; 肌電信號; 模式識別; STM32; 無線控制; 肌電假肢
中圖分類號: TN711?34; TP27 文獻標識碼: A 文章編號: 1004?373X(2018)02?0063?05
Abstract: To improve the living standard of the disabled and promote the development of medical treatment cause, a design scheme of prosthesis wireless control system based on neural network is proposed. With STM32 as the core chip of the system, BP neural network and SOFM neural network are combined for pattern recognition of electromyography (EMG) signal which are collected from four muscles of biceps, triceps, superficial flexor and extensor. Six motions of arm stretching, arm bending, wrist pronating, wrist supinating, fist clenching and hand opening can be accomplished by means of real?time control of myoelectric prostheses. The experimental results show that the overall recognition rate of the system for the six motions can reach to 97%, and the wireless real?time control pattern can help disabled patients who lose part of their limbs perform these basic operations more conveniently.
Keywords: neural network; EMG signal; pattern recognition; STM32; wireless control; myoelectric prosthesis
0 引 言
近20年來,由于意外事故、先天缺陷、疾病、自然災害等原因,我國肢體殘疾人口增長迅速。根據中國殘疾人聯合會在2012年發布的數據顯示,截至2010年末,我國僅僅肢體殘疾的人數就已經達到2 472萬人,相比1987年的755萬人增長了兩倍多 [1]。為了代替失去肢體的部分功能,使截肢者恢復一定的生活自理和工作能力,假肢應運而生。另外,某些特定作業需要在高溫、嚴寒或高強度輻射等不適合人類進入的特殊環境中進行。為了避免危險環境對人們可能造成的傷害,可以通過安全區內的操作者以遠程操控機械臂的方式,完成危險區域內的作業。因此,開展假肢無線控制系統的設計研究對于改善殘疾人的生活水平和促進醫療事業發展具有十分重要的意義。
目前肌電假肢大多是基于閾值控制的,識別率比較低,并且操作靈活性差。針對這些問題,模式識別分類算法被應用到假肢控制中[2],本文提出一種基于神經網絡的假肢無線控制系統設計方案。該系統包括“肌電信號(Electromyography,EMG)”采集、模式識別和無線實時遙控系統,可對前臂截肢患者安裝的假肢實現自主控制的6種動作;也可對高溫、嚴寒或高輻射環境中的機械臂實現無線遠程操控,完成特定任務。
1 系統總體設計方案
基于神經網絡算法的肌電信號模式識別假肢無線控制系統的總體設計方案如圖1所示。
使用者在使用肌電假肢之前需要通過肌電信號采集模塊對不同類型的動作進行訓練,相比目前肌電信號訓練都在Matlab中完成,本系統對于肌電信號的訓練在C語言中直接完成。訓練結束后,系統就會采用神經網絡算法,對采集到的肌電信號進行模式識別分類,從而對相應的動作做出區分。對不同動作進行賦予不同的編碼,通過發送模塊將編碼發出。編碼到達接收模塊,首先進行解碼行為,區分出不同的動作,再觸發假肢驅動電路,完成相應的動作。
2 肌電假肢硬件設計
整個假肢控制系統由硬件系統和軟件系統兩個部分組成,肌電假肢硬件電路部分主要模塊如圖2所示,包括肌電信號采集模塊、肌電信號處理模塊、無線傳輸模塊以及電源供電模塊。
2.1 肌電信號采集
表面肌電信號(Surface electromyography,sEMG)是一種微弱的由肌肉收縮伴隨產生的非線性非平穩生物電信號,包含著重要的神經肌肉運動信息,廣泛應用于運動意圖識別領域[3]。肌電信號采集模塊的功能是將人胳膊上特定肌肉的肌電信號進行采集與處理,通過A/D轉換,得到相應的數字信號。肌電信號屬于高噪聲背景下的低頻微弱信號,因此肌電信號采集模塊要盡可能地濾除噪聲,保留有效信號[4]。endprint
本文使用EB?muscle Sensor V1.2肌電信號傳感器完成信號采集。EB?muscle Sensor V1.2傳感器使用雙電源供電,最高3.5 V,最低-3.5 V,內置放大電路和濾波電路。
2.2 肌電信號處理模塊
肌電信號處理模塊是整個系統的核心部分,將整個系統的各個模塊整合在一起,完成系統的各個功能。肌電信號采集完成后送入處理模塊,在該模塊里對肌電信號進行訓練和識別,得到相應的分類數據,將這些數據編碼通過無線發送模塊輸出,控制假肢完成對應的動作。本文采用ST公司的STM32F103ZET6作為系統核心芯片,其是32位基于ARM核心的帶512 kB閃存的微控制器。芯片的選擇基于以下三點:
1) 擁有ARM32位的Cortex?M3 CPU,最高工作頻率可達72 MHz,對肌電信號這樣復雜的數據進行算法處理提供足夠的速度,完成實時控制的效果;
2) 集成了大量的外設,包括USB、CAN、11個定時器、3個ADC、13個通信接口,能很好地實現與外部電路通信、電源控制等功能;
3) 低功耗:有睡眠、停機和待機模式,延長工作時間。
2.3 無線傳輸模塊
肌電信號采集后,經過神經網絡模式識別分類算法計算出動作類型,將不同的動作進行編碼,編碼后通過無線發送模塊發射出,接收模塊在接收到編碼后,進行解碼處理,根據解碼結果控制假肢完成相應的動作。本文使用的編解碼器分別是PT2262和PT2272見圖3。
圖3a)為PT2262芯片,A0~A5作為地址位,A6 ~A11既可以作為地址位也可以作為數據位。圖3b)中PT2272解碼芯片分為4路并行數據型和6路并行數據型。采用6路并行數據時,對應的地址編碼則變為6位。此時,只采用A0~A5引腳作為地址位,而A6~A11作為數據位,相應的PT2262編碼芯片的地址位和數據位也需要與PT2272保持一致。
本文考慮到要識別6種動作,因此設計過程中采用6路并行數據,使用A6 ~ A11作為數據位,通過高低電位即可對不同動作進行編碼,例如(1,0,0,0,0,0)對應屈臂動作,(0,1,0,0,0,0)對應伸臂動作。
3 肌電假肢軟件設計
本文設計了一套基于神經網絡算法的軟件程序,協調硬件部分實現對肌電假肢的無線控制。軟件可以完成三部分功能:肌電信號實時采集、神經網絡模式識別以及無線控制。
3.1 肌電信號實時采集
肌電信號采集部分控制下位機采集肌電信號,通過串口將經處理過的肌電信號顯示在計算機上,方便用戶觀察肌電信號的數值,同時也能對電極放置的情況進行調整。
3.2 肌電信號神經網絡模式識別
由于腕外旋和握拳兩種動作的肌電信號差異不明顯,僅僅使用BP(Back Propagation)神經網絡進行模式識別的識別率不夠高,因此本文使用BP神經網絡算法[5?7]與自組織特征映射網絡(SOFM)神經網絡相結合對采集到的肌電信號進行分類和模式識別,使用者首先需要對6種動作進行訓練,訓練過后會得到一組修正過的權值,將權值重新寫入識別程序,從而完成對于不同動作的識別。
3.2.1 BP神經網絡與SOFM神經網絡
BP神經網絡是一種按誤差逆傳播算法訓練的多層前饋網絡,于1986年由Rumelhart和McCelland為首的科學家小組提出,是目前應用最廣泛的神經網絡模型之一。BP神經網絡算法的學習規則是使用梯度下降法,通過反向傳播來不斷調整網絡的權值和閾值,使網絡的誤差平方和最小[8]。
自組織特征映射(SOFM)神經網絡是自組織網絡中的一種,所謂的自組織過程是指學習的結果總是使聚類區內各神經元的權重向量保持向輸入向量逼近的趨勢,從而使具有相近特性的輸入向量聚集在一起。這種結構的網絡能夠從輸入信息中找出規律以及關系,并且根據這些規律來相應地調整網絡,使得以后的輸出與之相適應[9]。
3.2.2 BP?SOFM神經網絡算法的實現
在訓練階段,使用6種動作的表面肌電信號樣本進行BP神經網絡訓練,并且把腕外旋和握拳兩種動作歸類為一種輸出。與此同時,使用腕外旋和握拳兩種動作的表面肌電信號對SOFM神經網絡進行訓練。
在識別階段,BP神經網絡判斷識別結果為曲臂、伸臂、腕內旋或張手四種動作中的一種,則直接輸出識別結果。如果BP神經網絡的判別結果為腕外旋和握拳兩種動作合并后的這一類動作,則將該樣本輸入SOFM神經網絡進一步識別,從而識別出這個動作是腕外旋還是握拳。
訓練和識別過程分別如圖4a)和圖4b)所示。
BP神經網絡利用一種激活函數來描述層與層輸出之間的關系,從而模擬各層之間的交互聯系。一種比較常用的激活函數稱為S型函數:
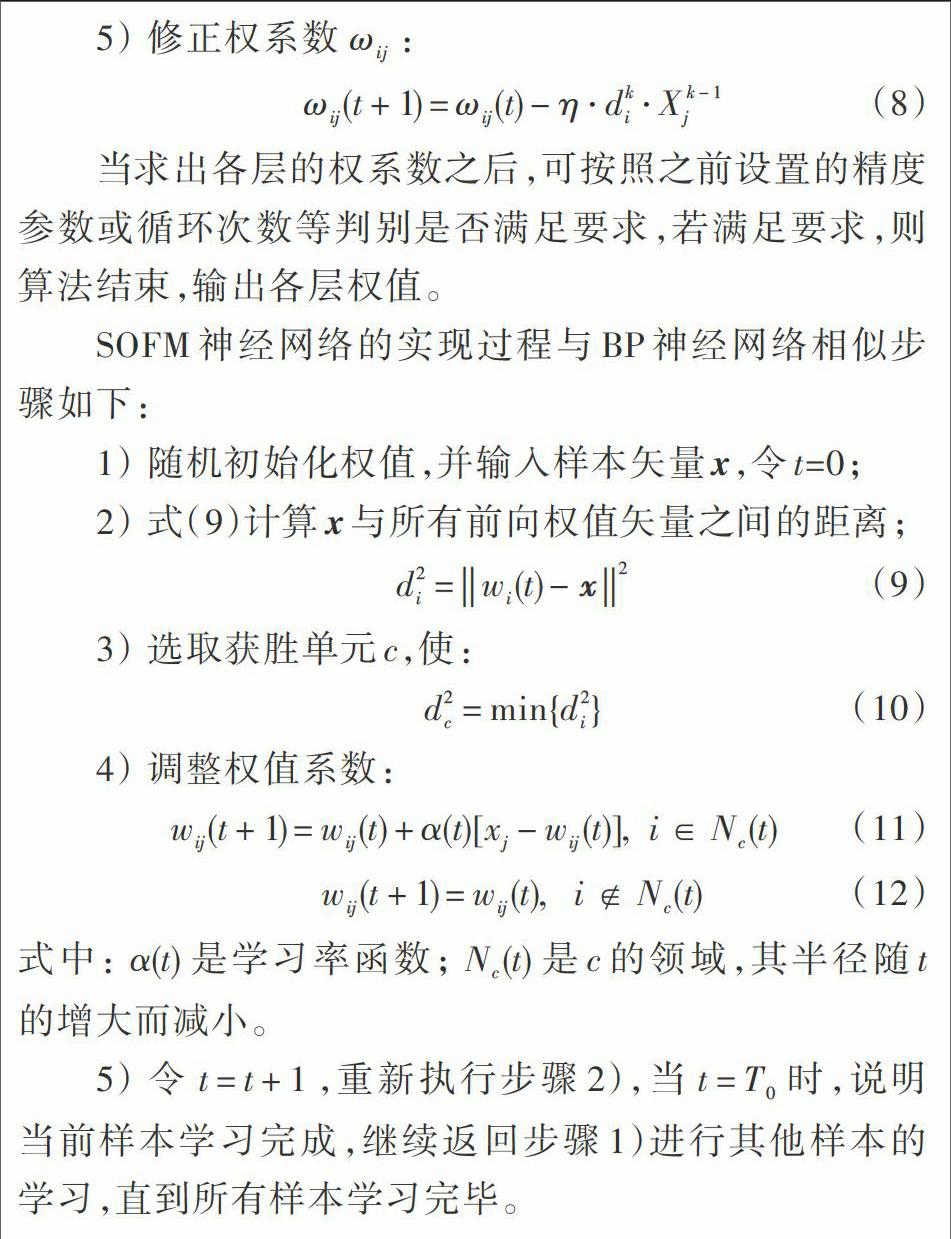
當求出各層的權系數之后,可按照之前設置的精度參數或循環次數等判別是否滿足要求,若滿足要求,則算法結束,輸出各層權值。
SOFM神經網絡的實現過程與BP神經網絡相似步驟如下:
1) 隨機初始化權值,并輸入樣本矢量x,令t=0;
2) 式(9)計算x與所有前向權值矢量之間的距離;
5) 令,重新執行步驟2),當時,說明當前樣本學習完成,繼續返回步驟1)進行其他樣本的學習,直到所有樣本學習完畢。
4 系統測試與結果
系統硬件實物圖如圖5所示, 發送模塊和接收模塊硬件電路圖如圖6所示。
4.1 模式識別結果
實驗時,在前臂肱二頭肌、肱三頭肌、指淺屈肌、指伸肌這四塊肌肉貼上電極,采集伸臂、屈臂、腕內旋、腕外旋、張手、握拳6種動作時四塊肌肉的肌電信號。重復實驗200次,得到200組數據,其中150組作為訓練樣本,50組作為識別試樣樣本。僅僅使用BP神經網絡識別結果如表1所示,使用BP?SOFM神經網絡的識別結果如表2所示。endprint
對比表1和表2 可以看出,使用BP神經網絡與SOFM神經網絡相結合可以大大提高腕外旋和握拳兩種動作的識別率。
4.2 在線識別結果
將修正后的權值送入STM32系統中,實現在線識別。在線實驗中,每個動作做30次,觀察串口得到的數據以及假肢的實時動作,結果如表3所示。
通過對表3中數據分析計算可知,利用神經網絡算法的肌電信號識別率可達97%,相對于傳統的閾值識別算法86.4%的識別率[10]高出了10%,大大提高了動作識別率。
5 結 語
本文設計了一套基于神經網絡的肌電假肢無線控制系統,采集上肢4塊肌肉的肌電信號,經過BP?SOFM神經網絡算法模式識別,通過無線傳輸方式,實現了屈臂、伸臂、腕外旋、腕內旋、張手、握拳6種動作。整個系統軟硬件相結合,對于肌電信號的識別率總體可以達到97%,并且識別速度很快,能夠實現實時控制的目標。
參考文獻
[1] 中國殘疾人聯合會.2010年末全國殘疾人總數及各類、不同殘疾等級人數[EB/OL].[2013?01?29].http://www.cdpf.org.cn/sjzx/cjrgk/201206/t20120626_387581.shtml.
China Disabled Persons′ Federation. The total number of the disabled and the number of each level of the disabled in China at the end of 2010 [EB/OL]. [2013?01?29]. http://www.cdpf.org.cn/sjzx/cjrgk/201206/t20120626_387581.shtml.
[2] LI G, SCHULTZ A E, KUIKEN T A. Quantifying pattern recognition?based myoelectric control of multifunctional transradial prostheses [J]. IEEE transactions on neural system and rehabilitation engineering, 2010, 18(2): 185?192.
[3] 丁其川,熊安斌,趙新剛,等.基于表面肌電的運動意圖識別方法研究及應用綜述[J].自動化學報,2016,42(1):13?25.
DING Qichuan, XIONG Anbin, ZHAO Xingang, et al. Research and application of motion intention recognition method based on surface electromyography [J]. Journal of automation, 2016, 42(1): 13?25.
[4] 田嵐,姜乃夫,李光林.基于微處理器的多功能肌電假肢控制系統[J].集成技術,2013,2(4):14?19.
TIAN Lan, JIANG Naifu, LI Guanglin. Multifunctional myoelectric prosthetic control system based on microprocessor [J]. Integration technology, 2013, 2(4): 14?19.
[5] 孫保峰. 基于神經網絡的表面肌電信號分類方法研究[D].長春:吉林大學,2013.
SUN Baofeng. Classification of surface EMG signals based on neural network [D]. Changchun: Jilin University, 2013.
[6] ZHANG Q H, MENG X H, GUO H C, et al. Obstacles based on BP neural network pattern recognition [C]// Proceedings of 2012 International Conference on Mechatronics and Automation (ICMA). Chengdu: IEEE, 2012: 2574?2581.
[7] LI Y, TIAN Y, CHEN W. Multi?pattern recognition of sEMG based on improved BP neural network algorithm [C]// Proceedings of Chinese Control Conference. Beijing: Chinese Academy of Science, 2010(7): 2867?2872.
[8] 朱福珍,吳斌.SOFM網絡及其在Matlab中的實現[J].微計算機信息,2005,21(12):163?165.
ZHU Fuzhen, WU Bin. SOFM network and its implementation in MATLAB [J]. Microcomputer information, 2005, 21(12): 163?165.
[9] 李萍,曾令可,稅安澤,等.基于MATLAB的BP神經網絡預測系統的設計[J].計算機應用與軟件,2008,25(4):149?150.
LI Ping, ZENG Lingke, SHUI Anze, et al. Design of BP neural network prediction system based on MATLAB [J]. Computer application and software, 2008, 25(4): 149?150.
[10] 喻洪流,胡加華.基于動態閾值的肌電假手動作控制方法研究[J].現代科學儀器,2011(3):43?45.
YU Hongliu, HU Jiahua. Research on control method of dynamic threshold based on the action of prosthetic hand [J]. Modern scientific instruments, 2011(3): 43?45.endprint
猜你喜歡
中成藥(2018年2期)2018-05-09 07:19:52
智能系統學報(2018年6期)2018-02-04 11:23:57
中成藥(2017年10期)2017-11-16 00:50:05
電子測試(2017年23期)2017-04-04 05:06:50
智能系統學報(2017年5期)2017-01-22 11:21:30
電測與儀表(2016年6期)2016-04-11 12:07:48
海軍航空大學學報(2015年1期)2015-11-11 17:17:57
智能系統學報(2015年3期)2015-01-29 15:20:12
電測與儀表(2014年15期)2014-04-04 12:05:20
河南科技(2014年5期)2014-02-27 14:08:35
