帶調(diào)壓閥的水輪機(jī)實(shí)時(shí)仿真系統(tǒng)
2018-01-26 08:44:48孔昭年熊曉蕾楊遠(yuǎn)生周同旭王柏柏郭瑤趙躍智
水電站機(jī)電技術(shù) 2018年1期
孔昭年,熊曉蕾,楊遠(yuǎn)生,周同旭,王柏柏,孔 勁,郭瑤,趙躍智
(1.中國水利水電科學(xué)研究院,北京 100044;2.天津電氣科學(xué)研究院有限公司,天津 300186;3.中國葛洲壩集團(tuán)海外投資有限公司,北京 100025)
在國家能源局“替代調(diào)壓井的新型調(diào)壓閥及其控制系統(tǒng)研究與電站示范應(yīng)用”科技項(xiàng)目的安排下,天津電氣科學(xué)研究院有限公司與中國水利水電科學(xué)研究院合作開發(fā)了:帶調(diào)壓閥的水輪機(jī)實(shí)時(shí)仿真系統(tǒng)及水輪機(jī)調(diào)速器綜合實(shí)驗(yàn)裝置。
帶調(diào)壓閥的水輪機(jī)調(diào)節(jié)系統(tǒng)實(shí)時(shí)仿真裝置對(duì)我國水輪機(jī)調(diào)速器行業(yè)意義重大,我們尚沒有收集到可供借鑒的國外有關(guān)資訊,它的完成將填補(bǔ)我國在此領(lǐng)域的空白,也將大大促進(jìn)我國水輪機(jī)調(diào)節(jié)領(lǐng)域的技術(shù)進(jìn)步。
1 帶調(diào)壓閥的水輪機(jī)數(shù)學(xué)模型
在圖1上示出了帶調(diào)壓閥的水輪機(jī)實(shí)時(shí)仿真原理圖,在此原理圖上最重要的是處理好水輪機(jī)非線性引出的非線性運(yùn)算。文獻(xiàn)(1)已作了詳細(xì)的介紹,本項(xiàng)目組的一個(gè)技術(shù)創(chuàng)新點(diǎn)是具有嚴(yán)重非線性特征的水輪機(jī)綜合特性曲線的外延與數(shù)學(xué)描述。由于實(shí)時(shí)仿真系統(tǒng)實(shí)時(shí)性很強(qiáng)、而且要確保計(jì)算連續(xù)、平穩(wěn);我們采用特征矩陣法描述水輪機(jī)特性,收到很好的效果;此外,為便于推廣此項(xiàng)成果,我們把能收集到的水輪機(jī)特性用完全相同的數(shù)學(xué)方法編制了一個(gè)專門的數(shù)據(jù)文件,調(diào)用十分靈活、方便。
圖1中,at為水輪機(jī)接力器行程,aft為調(diào)壓閥接力器行程;在實(shí)際應(yīng)用時(shí),他們分別接至水輪機(jī)調(diào)速器導(dǎo)葉接力器和調(diào)壓閥接力器的位移傳感器;xt表征水輪發(fā)電機(jī)相對(duì)轉(zhuǎn)速偏差,實(shí)際應(yīng)用時(shí)經(jīng)過仿真裝置頻率變送器接至水輪機(jī)調(diào)速器測(cè)頻回路;從而一個(gè)由水輪機(jī)、發(fā)電機(jī)、引水系統(tǒng)非線性微分方程式和初始狀態(tài)參數(shù)及一個(gè)真實(shí)的水輪機(jī)調(diào)速器及調(diào)壓閥形成閉環(huán)調(diào)節(jié)系統(tǒng),經(jīng)過各種接口施加各種擾動(dòng)信號(hào)(如負(fù)荷擾動(dòng)、開停機(jī)等)就可以進(jìn)行各種動(dòng)態(tài)特性試驗(yàn)。從而在制造廠內(nèi)盡早發(fā)現(xiàn)調(diào)速器的缺陷,促進(jìn)產(chǎn)品質(zhì)量的提高。

由于實(shí)時(shí)計(jì)算步長(zhǎng)通常取0.05 S,在這樣短的時(shí)段內(nèi)不僅要完成全部非線性微分方程式的求解,還要完成數(shù)據(jù)的輸出和采集、輸出實(shí)時(shí)頻率等功能。水輪機(jī)特性必須經(jīng)過特殊處理,水輪機(jī)流量、力矩特性矩陣的表達(dá)式為[1]:

公式(1)~(4)“=”右端四個(gè)矩陣及水輪機(jī)流量和力矩的特性矩陣應(yīng)在仿真數(shù)據(jù)準(zhǔn)備階段根據(jù)有關(guān)數(shù)據(jù)表求得,對(duì)于軸流轉(zhuǎn)槳式水輪機(jī)對(duì)應(yīng)每個(gè)定槳特性相類似地求取水輪機(jī)流量和力矩的特性矩陣;在實(shí)時(shí)仿真的主程序段,只要已知某一時(shí)刻的x11t和at就可很快計(jì)算出該時(shí)間的單位流量和單位力矩:

圖1除非線性特性的水輪機(jī)特性外,水電站引水系統(tǒng)的動(dòng)力學(xué)特性數(shù)學(xué)模型,有標(biāo)準(zhǔn)化形式描述[2,3]:
(1)剛性水錘

適用條件:Tf/Tr>6 及 Tw/Tr>2;
(2)近似彈性水錘

適用條件:3<Tf/Tr<6,0.5<Tw/Tr>2;
(3)彈性水錘

其中hw=Tw/Tr;水輪機(jī)管道特性系數(shù);
適用條件:Tf/Tr<3,Tw/Tr<0.5;
(4)帶調(diào)壓井的引水系統(tǒng)數(shù)學(xué)模型

(5)分叉管(見圖2)數(shù)學(xué)模型
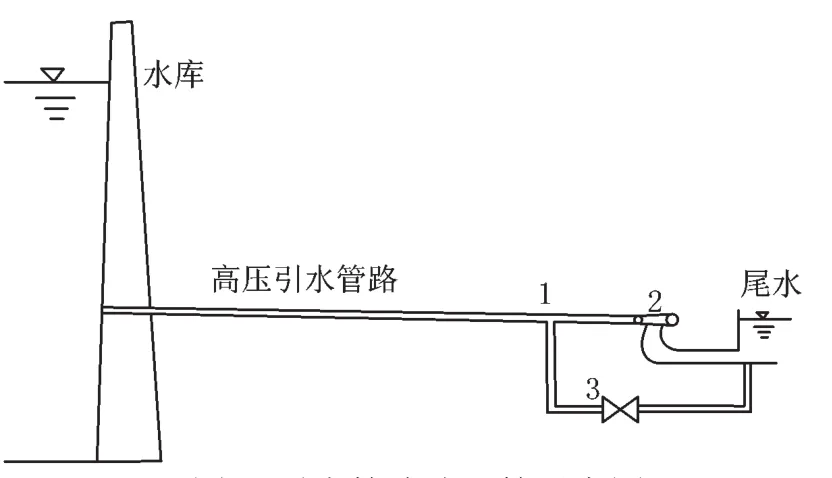
圖2 引水管路分叉管示意圖
式中:q1為管路總流量;q2為水輪機(jī)流量;q3為調(diào)壓閥流量;h0為初始水頭;ht為水頭偏差;以剛性水擊為例,有:
式中:Tw1為水庫到分叉管的水流慣性時(shí)間常數(shù),Tw2為分叉管到水輪機(jī)組的水流慣性時(shí)間常數(shù),Tw3為分叉管到調(diào)壓閥的水流慣性時(shí)間常數(shù);在實(shí)際中取

2 軟件結(jié)構(gòu)與硬件平臺(tái)
有多種技術(shù)手段實(shí)現(xiàn)實(shí)時(shí)仿真裝置硬件平臺(tái),如IPC、PLC等,經(jīng)比較我們選取發(fā)展勢(shì)頭強(qiáng)勁的DSP作為我們研發(fā)的綜合實(shí)驗(yàn)裝置的硬件平臺(tái)。
水輪發(fā)電機(jī)組實(shí)時(shí)仿真及水輪機(jī)調(diào)速器試驗(yàn)裝置由模塊化硬件及配套的電腦軟件組成。其中硬件電路采用DSP為核心控制單元,輔助外圍各種模塊化功能電路構(gòu)成。電腦的上位機(jī)軟件采用Visual Basic開發(fā)環(huán)境進(jìn)行開發(fā)。
(1)上位機(jī)客戶端軟件系統(tǒng)圖如圖3所示,包括實(shí)時(shí)數(shù)據(jù)采集模塊、輸出形成word文件模塊、試驗(yàn)功能模塊及用戶自定義操作設(shè)置。
1)基于為本設(shè)備開發(fā)的高效的通信協(xié)議,可以提高串行通信效率,實(shí)現(xiàn)數(shù)據(jù)的實(shí)時(shí)傳輸和處理。
2)盡管采用數(shù)據(jù)庫存儲(chǔ)數(shù)據(jù)對(duì)開發(fā)人員要求較低,但是考慮到數(shù)據(jù)讀取的方便性、通用性和安全性,我們不僅將需要保存的數(shù)據(jù)以圖片的形式存儲(chǔ)為word文件,還對(duì)原始數(shù)據(jù)進(jìn)行了加密算法后生成為僅能被本軟件識(shí)別的文件格式進(jìn)行保存。

圖3 上位機(jī)客戶端軟件系統(tǒng)圖
3)因?yàn)槭菍iT針對(duì)水輪機(jī)調(diào)速器的仿真試驗(yàn)設(shè)備,要求能夠單獨(dú)做調(diào)速器的各種試驗(yàn),所以軟件內(nèi)置了大部分調(diào)速器試驗(yàn)的控制程序,操作人員僅需少量操作,本系統(tǒng)即可完成大部分調(diào)速器的試驗(yàn)。
4)考慮到用戶使用的流暢和方便,硬件每個(gè)輸入輸出端口均可自定義,并且具備相關(guān)的軟件功能模塊。

圖4 下位機(jī)客戶仿真試驗(yàn)儀系統(tǒng)圖
(2)下位機(jī)客戶仿真試驗(yàn)儀系統(tǒng)圖如圖4,包括通訊模塊、數(shù)據(jù)采集模塊、分析計(jì)算模塊、信號(hào)調(diào)制解調(diào)模塊及實(shí)時(shí)仿真模塊。
1)解碼上位機(jī)的指令,根據(jù)上位機(jī)的要求將數(shù)據(jù)發(fā)送至上位機(jī)。
2)采集模擬量輸入和高頻輸入信號(hào),經(jīng)過軟件濾波器濾波后進(jìn)入待發(fā)序列,普通的數(shù)字量輸入信號(hào)經(jīng)過軟件防抖處理后進(jìn)入待發(fā)序列。
3)因?yàn)橄挛粰C(jī)精度較高,所以一些對(duì)時(shí)間精度有要求的試驗(yàn)數(shù)據(jù)會(huì)由下位機(jī)測(cè)量計(jì)算,可精確至0.5 μs。
4)實(shí)時(shí)仿真運(yùn)算模塊采用了離散化的數(shù)學(xué)模型及優(yōu)化算法,循環(huán)迭代周期小于20 ms。
5)計(jì)算出的數(shù)據(jù)經(jīng)過調(diào)制整形后,轉(zhuǎn)換為標(biāo)準(zhǔn)信號(hào)進(jìn)行輸出,輸出信號(hào)刷新時(shí)間小于20 ms。
6)考慮到通用性,通訊接口采用標(biāo)準(zhǔn)RS232接口,開發(fā)了設(shè)備專屬的通信協(xié)議,由于采用了效率較高的通信協(xié)議和編碼形式,上位機(jī)對(duì)設(shè)備數(shù)據(jù)的采樣時(shí)間小于20 ms,優(yōu)于國內(nèi)外大多數(shù)產(chǎn)品。
(3)硬件電路主要包括:電源模塊、AD采集模塊、DA輸出模塊、頻率輸出模塊、頻率測(cè)量模塊和通訊接口電路。
1)電源模塊采用AC及DC通用輸入,并輔以相關(guān)的線路濾波、去耦和限壓限流等保護(hù)電路。
2)采用美國微芯公司出品的DSP作為核心處理單元,并采用MPLAP IDE系統(tǒng)集成開發(fā)環(huán)境進(jìn)行DSP的下位機(jī)程序開發(fā)。
3)具備12路AD輸入,可接受-10~10V之間的電壓信號(hào)或20 mA以內(nèi)的電流信號(hào)。我們采用了帶光電隔離的AD采集方式,這種方式抗干擾效果明顯,現(xiàn)有的設(shè)計(jì)精度0.1%,線性度誤差0.23%,優(yōu)于大多數(shù)同類產(chǎn)品。
4)可提供4路DA輸出電路,采用了DSP自帶的高速輸出模塊產(chǎn)生高頻脈沖,再進(jìn)行PWM調(diào)制,并經(jīng)過硬件電路將方波轉(zhuǎn)化為4~20 mA的模擬信號(hào)。經(jīng)測(cè)試線性度誤差0.08%,優(yōu)于大多數(shù)傳感器。
5)可提供2路頻率輸出模塊,同樣采用DSP自帶的高速輸出模塊,根據(jù)軟件的設(shè)定產(chǎn)生相應(yīng)頻率的波形,輸出頻率范圍 0.5~100 Hz,精度 <=0.002 Hz。
6)具備2路頻率測(cè)量模塊,采用DSP自帶的高速輸入捕捉功能,保證實(shí)時(shí)性和精度。另外,由于考慮到硬件的使用環(huán)境,在使用二階低通濾波器進(jìn)行硬件濾波之外,也增加了軟件濾波器。測(cè)頻精度為0.0025%,延時(shí)小于0.5 μs,性能優(yōu)于國內(nèi)外大部分同類產(chǎn)品。
7)具備4路DI和4路DO模塊,均采用隔離輸入輸出的形式,其中DO通過繼電器輸出,以便于帶較大負(fù)載。
8)設(shè)備可提供 +5V、+12V、-12V、+24V 等電壓等級(jí)的電源輸出。
3 實(shí)時(shí)仿真系統(tǒng)功能
研發(fā)的試驗(yàn)裝置具有高度自動(dòng)化、智能化;符合電力行業(yè)有關(guān)標(biāo)準(zhǔn)的要求。
3.1 調(diào)節(jié)對(duì)象實(shí)時(shí)仿真功能
(1)依據(jù)提供的水輪機(jī)、發(fā)電機(jī)及引水系統(tǒng)的技術(shù)資料,利用本裝置的軟件模塊建立調(diào)節(jié)對(duì)象的數(shù)學(xué)模型(水輪機(jī)依據(jù)綜合特性曲線建模)。
(2)實(shí)時(shí)仿真系統(tǒng)能輸出水輪機(jī)蝸殼進(jìn)口處水壓信號(hào)和水輪發(fā)電機(jī)組頻率信號(hào)。信號(hào)的形式和電平能與調(diào)速設(shè)備相匹配,與水輪機(jī)調(diào)速器構(gòu)成調(diào)速系統(tǒng)。
(3)實(shí)時(shí)仿真模型主要特性參數(shù)可人為整定和校驗(yàn)。
3.2 水輪機(jī)調(diào)速器試驗(yàn)和檢測(cè)功能
依據(jù)有關(guān)標(biāo)準(zhǔn),裝置可進(jìn)行調(diào)節(jié)系統(tǒng)試驗(yàn)、檢測(cè)及其動(dòng)態(tài)過程記錄的項(xiàng)目。
(1)調(diào)節(jié)系統(tǒng)靜態(tài)特性試驗(yàn)及轉(zhuǎn)速死區(qū)指標(biāo)、靜態(tài)特性非線性度和永態(tài)轉(zhuǎn)差系數(shù)檢測(cè)。
(2)電液隨動(dòng)系統(tǒng)(含轉(zhuǎn)輪葉片接力器電液隨動(dòng)系統(tǒng))、靜態(tài)特性試驗(yàn)及各類隨動(dòng)系統(tǒng)不準(zhǔn)確度檢測(cè)。
(3)電液隨動(dòng)系統(tǒng)動(dòng)態(tài)特性試驗(yàn)。
(4)電子調(diào)節(jié)器調(diào)節(jié)規(guī)律試驗(yàn)和調(diào)節(jié)參數(shù)Kp、KI、KD的校驗(yàn)。
(5)水輪發(fā)電機(jī)組開機(jī)過程試驗(yàn)。(6)水輪發(fā)電機(jī)組停機(jī)過程試驗(yàn)。
(7)水輪機(jī)調(diào)節(jié)系統(tǒng)空載擾動(dòng)試驗(yàn)。
(8)水輪機(jī)調(diào)節(jié)系統(tǒng)手動(dòng)工況和自動(dòng)工況下空載頻率擺動(dòng)值測(cè)定。
(9)水輪發(fā)電機(jī)組負(fù)荷調(diào)整(增、減)試驗(yàn)及水輪發(fā)電機(jī)組一次調(diào)頻相關(guān)試驗(yàn)。
(10)負(fù)荷擾動(dòng)試驗(yàn)。
(11)水輪機(jī)調(diào)節(jié)系統(tǒng)甩負(fù)荷過程試驗(yàn):
a)水輪機(jī)調(diào)速器接力器不動(dòng)時(shí)間檢測(cè)試驗(yàn);b)水輪機(jī)調(diào)節(jié)系統(tǒng)甩100%負(fù)荷時(shí)動(dòng)態(tài)過程記錄及調(diào)節(jié)時(shí)間和波動(dòng)次數(shù)等動(dòng)態(tài)特性指標(biāo)檢測(cè)。
(12)調(diào)節(jié)系統(tǒng)故障模擬試驗(yàn)。通過如下試驗(yàn)觀測(cè)在各種故障情況下接力器的擺動(dòng):
a)頻率信號(hào)消失;
b)接力器位移傳感器故障;
c)電液隨動(dòng)系統(tǒng)故障;
d)交直流電源切換和交直流電源同時(shí)消失;e)雙機(jī)切換試驗(yàn);
f)電液轉(zhuǎn)換部件故障及雙電液轉(zhuǎn)換部件切換試驗(yàn);
g)負(fù)荷反饋與設(shè)定故障試驗(yàn);h)水頭信號(hào)故障試驗(yàn)。
(13)調(diào)節(jié)系統(tǒng)手、自動(dòng)切換試驗(yàn)。
(14)自定義的功能試驗(yàn)。
(15)作為穩(wěn)定的頻率信號(hào)源及試驗(yàn)記錄裝置參與水輪機(jī)調(diào)節(jié)系統(tǒng)的電磁兼容試驗(yàn)。
3.3 試驗(yàn)數(shù)據(jù)采集、存儲(chǔ)和數(shù)據(jù)處理功能
(1)裝置的前置信號(hào)處理器和配套的傳感器搭載到計(jì)算機(jī)平臺(tái)上,加上配備的實(shí)時(shí)仿真、測(cè)試和分析軟件應(yīng)可實(shí)現(xiàn)數(shù)據(jù)采集、存儲(chǔ)、曲線生成和特性參數(shù)的分析功能。
(2)對(duì)采集來的數(shù)據(jù)分析處理、特性指標(biāo)計(jì)算均符合有關(guān)電力行業(yè)標(biāo)準(zhǔn)的相應(yīng)條款規(guī)定。
(3)裝置應(yīng)具有數(shù)據(jù)通信接口,具備與打印、繪圖等輸出設(shè)備連接,輸出圖形、數(shù)據(jù)的功能。
3.4 信號(hào)頻率檢測(cè)及頻率信號(hào)發(fā)生器功能
(1)裝置具有信號(hào)頻率檢測(cè)的功能,可檢測(cè)的信號(hào)頻率范圍為0.5~100 Hz,可工作的電壓為0.3~150 V(RMS),短時(shí)可承受200 V。
(2)裝置具有頻率信號(hào)發(fā)生器的功能,信號(hào)波形為正弦波或方波,信號(hào)頻率的范圍0.5~100 Hz,頻率可人為調(diào)整和設(shè)定,頻率還可按約定的輸出方式自動(dòng)改變。
4 調(diào)速器動(dòng)態(tài)特性試驗(yàn)
應(yīng)新疆連合電力開發(fā)公司的請(qǐng)求,利用剛剛研制開發(fā)的帶調(diào)壓閥的水輪機(jī)調(diào)速器實(shí)時(shí)仿真系統(tǒng),在天津電氣科學(xué)研究院有限公司內(nèi)抽取試驗(yàn)用真實(shí)調(diào)速器和調(diào)壓閥,與仿真裝置閉環(huán)進(jìn)行動(dòng)態(tài)特性試驗(yàn);利用由新疆卡伊爾特電站參數(shù)組成的系統(tǒng)進(jìn)行了機(jī)組啟動(dòng)、空載擾動(dòng)、甩25%、50%、75%、100%負(fù)荷自動(dòng)調(diào)節(jié)試驗(yàn),在自動(dòng)調(diào)節(jié)狀態(tài)下,在所有試驗(yàn)項(xiàng)目中水輪機(jī)調(diào)節(jié)系統(tǒng)過渡過程穩(wěn)定收斂,調(diào)節(jié)過程正常(見圖5~圖10)。

圖5 機(jī)組起動(dòng)試驗(yàn)
試驗(yàn)證明接受啟動(dòng)命令后機(jī)組穩(wěn)定控制在額定轉(zhuǎn)速。

圖6 空載擾動(dòng)試驗(yàn)
按常規(guī)擾動(dòng)量為48~52Hz,系統(tǒng)穩(wěn)定,近于單調(diào)地完成調(diào)節(jié)。系統(tǒng)穩(wěn)定。

圖7 機(jī)組甩25%負(fù)荷試驗(yàn)
調(diào)壓閥沒有動(dòng)作,hmax=0.087;Xmax=0.067.最后轉(zhuǎn)速調(diào)節(jié)穩(wěn)定。

圖8 機(jī)組甩50%負(fù)荷試驗(yàn)
調(diào)壓閥開至0.57后關(guān)閉,hmax=0.102;Xmax=0.158;最后轉(zhuǎn)速調(diào)節(jié)穩(wěn)定。

圖9 機(jī)組甩75%負(fù)荷試驗(yàn)
調(diào)壓閥開啟值90.46,后關(guān)閉。hmax=0.0823;Xmax=0.29;最后轉(zhuǎn)速調(diào)節(jié)穩(wěn)定。

圖10 機(jī)組甩100%負(fù)荷試驗(yàn)
調(diào)壓閥開至96.94%后關(guān)閉,hmax=0.062 8;Xmax=0.402.最后轉(zhuǎn)速調(diào)節(jié)穩(wěn)定。
新疆卡伊爾特電站帶調(diào)壓閥的水輪機(jī)調(diào)速器實(shí)時(shí)仿真系統(tǒng)動(dòng)態(tài)特性穩(wěn)定。得到方便、滿意的試驗(yàn)結(jié)論。
5 結(jié)論
(1)硬件電路采用DSP為核心控制單元,開發(fā)的水輪機(jī)調(diào)節(jié)系統(tǒng)實(shí)時(shí)仿真綜合試驗(yàn)裝置具有體積小、功能強(qiáng)大的特點(diǎn),其試驗(yàn)功能、試驗(yàn)結(jié)果數(shù)據(jù)處理方法、裝置配置等完全符合現(xiàn)行電力行業(yè)有關(guān)技術(shù)標(biāo)準(zhǔn)的要求[2];特別是它具有的帶調(diào)壓閥的水輪機(jī)調(diào)節(jié)系統(tǒng)實(shí)時(shí)仿真綜合試驗(yàn)裝置填補(bǔ)了我國在此領(lǐng)域內(nèi)的技術(shù)空白,技術(shù)上有所突破和創(chuàng)新;
(2)該程序的技術(shù)核心之一就是研發(fā)真實(shí)水輪機(jī)動(dòng)態(tài)特性、調(diào)用方便、能包含水輪機(jī)型譜及其他所用常用水輪機(jī)特性、數(shù)學(xué)方法先進(jìn)、在計(jì)算中總體耗時(shí)小、利于推廣的數(shù)據(jù)文件。軟件對(duì)流量和力矩的計(jì)算分別采用了水輪機(jī)流量特征矩陣和力矩特征矩陣的非線性運(yùn)算方式,提高了計(jì)算速度和準(zhǔn)確度。該數(shù)據(jù)文件內(nèi)容豐富、調(diào)用方便、采用的數(shù)學(xué)方法先進(jìn),值得推廣;
(3)經(jīng)過現(xiàn)場(chǎng)試驗(yàn)資料的校核,模型、方法、結(jié)果和精度都達(dá)到了理想效果,壓力計(jì)算和轉(zhuǎn)速計(jì)算與現(xiàn)場(chǎng)實(shí)測(cè)的誤差在5%以內(nèi),形態(tài)與現(xiàn)場(chǎng)實(shí)測(cè)形態(tài)一致;應(yīng)強(qiáng)調(diào)在水輪機(jī)小開度下的模型試驗(yàn)資料嚴(yán)重缺失的狀況下,證明我們采取的特殊數(shù)學(xué)處理方法可行、有效;滿足工程計(jì)算的精度要求。為實(shí)時(shí)仿真裝置的開發(fā)及過渡過程計(jì)算提供了堅(jiān)實(shí)的基礎(chǔ)。
我們希望今后不斷豐富試驗(yàn)資料的積累,不斷完善有關(guān)計(jì)算方法,不斷提高水輪機(jī)調(diào)節(jié)系統(tǒng)實(shí)時(shí)仿真技術(shù)水平。我們也希望能有機(jī)會(huì)與有關(guān)單位合作將此項(xiàng)技術(shù)能及早應(yīng)用于我國抽水蓄能機(jī)組實(shí)時(shí)仿真領(lǐng)域。
[1]孔昭年.水輪機(jī)控制系統(tǒng)的設(shè)計(jì)與計(jì)算[M].武漢:長(zhǎng)江出版社,2012.
[2]DL/T 1120-2009水輪機(jī)調(diào)節(jié)系統(tǒng)自動(dòng)測(cè)試及實(shí)時(shí)仿真裝置技術(shù)條件[S].
[3]DL/T 1548-2016水輪機(jī)調(diào)節(jié)系統(tǒng)設(shè)計(jì)與應(yīng)用導(dǎo)則[S].
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
