基于S7-300的煤礦智能排水系統的設計
2018-01-30 10:51:07張澤厚
機械管理開發 2018年1期
張澤厚
(西山煤電(集團)山西清洗科技有限公司,山西太原030053)
引言
排水系統能否可靠、高效地運行關系著煤礦能否安全生產,國外在此方面起步較早,加拿大和芬蘭分別提出了數字化煤礦和智能化煤礦的概念,并利用PLC技術對現有煤礦機械設備做了改進和整合,使其更符合自動化生產的需要。而在國內,自動化排水系統依然沒有得到全面的推廣,21世紀初,張豐敏和王孝穎設計了智能化排水系統,并通過考慮水位變化和耗電量來達到節約用電的目的,但是很多煤礦依然采用人工操作模式,無法實現設備的遠程集中控制,同時現有的自動排水系統的控制策略依然存在著比較明顯的缺陷,無法真正實現“避峰填谷”,并且在實際運行過程中存在著一定的風險。本文設計的自動排水系統能夠實現水泵房的無人值守,具有完善故障處理措施,同時將涌水量作為是否開啟水泵以及水泵臺數的重要判據,從而達到節約電費的目的,實現真正的“避峰填谷”[1]。
1 排水系統總體結構設計
智能排水系統(見圖1)主要由地面集控上位機和井下控制系統組成。其中地面上位機與井下PLC控制柜通過工業以太網完成通信,上位機接收到井下排水系統運行狀態和參數后通過組態界面顯示出來,可以實時監控水倉水位、泵腔真空度、電機繞組溫度等,當井下系統出現故障時,上位機也會有警報顯示。
井下控制系統以PLC控制柜為核心,其不僅要接收各個傳感器以及設備反饋回來的信息,還要根據事先編寫好的程序分析處理這些數據,并做出合理動作。井下控制系統的另一個重要組成部分是就地控制箱,該裝置主要是由觸摸屏、按鈕和指示燈組成,工人通過控制箱可以實時監控系統的運行狀態,切換控制模式以及控制水泵的開啟和關閉[2]。
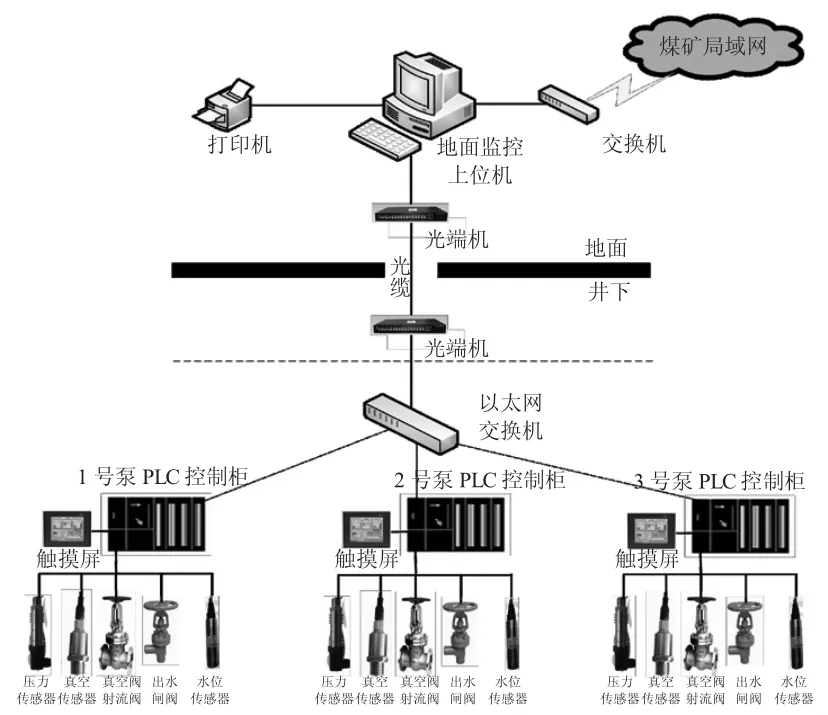
圖1 排水系統總體結構示意圖
2 系統硬件設計
PLC是硬件系統的核心,選用西門子的S7-300系列PLC,其中模擬量輸入信號有:排水總流量信號、電機定子和轉子溫度信號、電機的電流和電壓信號、水倉的水位信號、水泵真空度信號等;數字量輸入信號有:急停信號、故障復位信號,水泵開關狀態信號、電機故障信號、電磁閥開關返回信號、電動閘閥開關返回信號、控制方式選擇信號等;需要PLC輸出的數字量信號有:水泵電機的開關、電動閘(磁)開閉以及各種指示燈的開閉。控制系統的硬件結構圖如下頁圖2所示。
為了提高系統運行的可靠性和靈活性,本課題給每個水泵各配置了一臺PLC控制柜和一臺就地控制箱,每一臺PLC控制柜都可以獨立的控制泵的啟停以及采集數據,工人可以通過控制箱得到水泵運行的實時信息并可切換模式就地控制泵的啟停,當其他PLC控制柜發生故障無法工作時,也不會影響其他控制柜以及水泵的工作。正常情況下,選擇三臺PLC控制柜中的一臺作為主站,其他兩臺作為分站,這樣的話,就可以實現三臺水泵的集中控制,可以根據水位的高低選擇開泵臺數[3-4]。
通信方面,本系統采用工業以太網與上位監控計算機以及觸摸屏通信,這樣上位機也可以遠程修改觸摸屏組態界面。
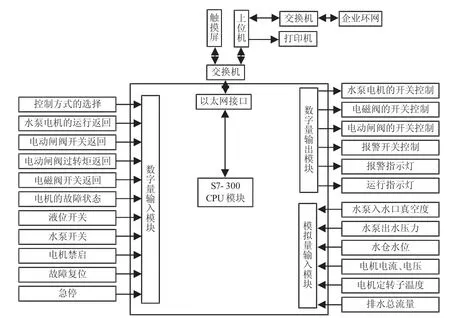
圖2 井下排水系統控制系統硬件結構圖
3 智能控制策略
3.1 傳統控制
由于水泵電機的功率普遍較大,所以排水系統的電費支出一直在煤礦生產中占有比較大的比重,所以煤礦多采用“避峰填谷”的原則設計控制策略傳統的“避峰填谷”的控制策略多采用的是“高低水位”法,即在水倉中劃分出三條線,分別是低水位、高水位和警戒水位,系統根據水位到達哪個線來判斷是否開泵以及開泵臺數,傳統排水策略流程如圖3所示[5]。

圖3 傳統排水策略流程圖
當水倉水位處于高水位時,如果此時不屬于峰段則開啟一臺水泵,如果屬于峰段時間則暫緩開泵,但是當水倉水位到達極限水位后,則無論是否處于峰段都會開啟一臺水泵。當水倉水位低于低水位時,則系統停泵。其中開泵臺數取決于水位下降的速度,如果水位下降速率較低,則選擇增開水泵。
但是這種控制策略本身存在著比較明顯的缺陷,比如其水位線的劃分主要是根據工人經驗,缺少嚴謹的數據計算;其依靠水位下降速率來決定開泵臺數,沒有考慮到涌水量的變化,如果涌水量較大時,這種控制策略就存在比較嚴重的滯后性,容易造成安全事故[6-7]。
3.2 改進后的控制策略
本文引入涌水量作為開啟水泵臺數的重要判據,從而使水泵在電價谷段盡量多排水,減少電費支出,同時將水倉水位維持在一個比較低的水位,在電價峰段盡量少開水泵,充分利用水倉容量。
“避峰就谷”優化調度策略原理圖如圖4所示。

圖4 “避峰就谷”優化控制策略原理圖
1)計算涌水量。我們設水倉的底面積為S,則一段時間t內涌水量即為S·ΔH,假設一段時間t開始時水倉液位是Hx-1,而結束時為Hx,那么單位時間的涌水量公式即為:

2)開泵臺數確定(見圖5)方法。本系統也對水倉水位設置了高低水位線以及警戒水位線,但不同的是,本系統在水位超過高水位時就啟動水泵排水,從而確保水位不會高過警戒水位。
當排水系統處于谷段時間且距電價峰段還有t1的時間,那么預計這段時間涌水量為Q1=qt1,而水倉內低水位線以上的水量為V,那么在谷段總的有qt1+V需要排出,假設泵的流量qe,那么需要開泵的臺數n1公式為:
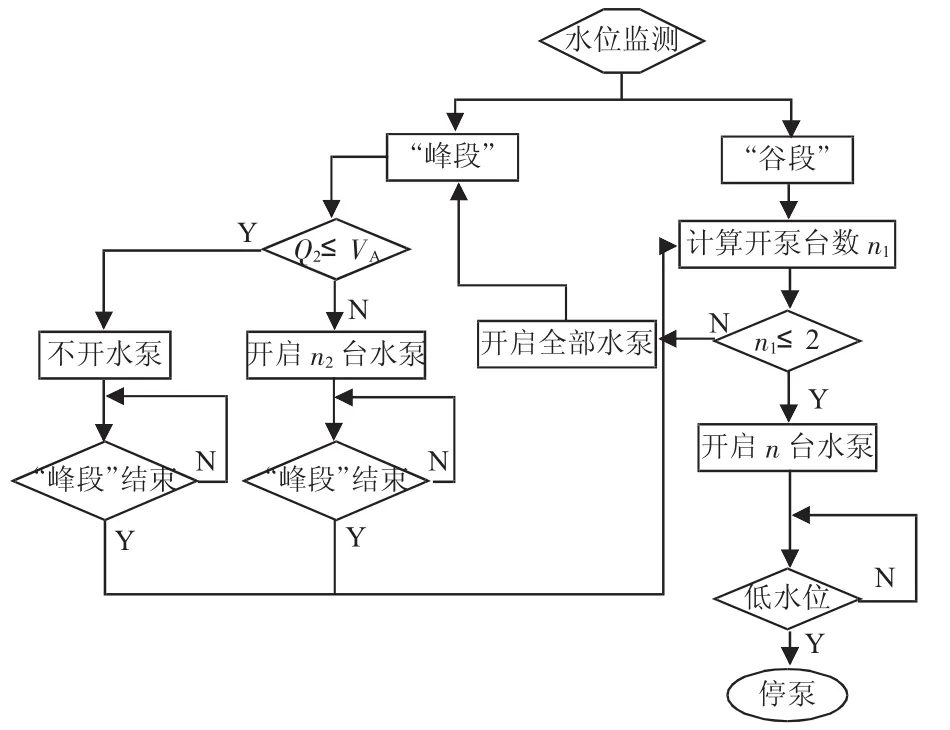
圖5 確定開泵臺數流程圖

若得到的n1≤2,那么就開啟n1臺水泵進行排水,盡量將水倉水位維持在低水位。
若得到的n1>2,那么就開啟所有水泵,盡量在峰段來臨之前多排一些水。
當排水系統處于電價峰段時,設還有t2時間到電價谷段來臨,那么預計涌水量為Q2=qt2,這段時間水倉還有的容量為VΔ+VH-Vx(VH為高水位的水量;Vx為當前水量),當Q2≤VΔ時,那么就不用開泵,因為這個時候即使不開泵,剩余時間的涌水也充不滿水倉。當Q2>VΔ時,就需要開啟水泵,確保水位在高水位一下,需要開啟水泵臺數n2公式為:

3)水位變化率。設某段時間內的水位變化率為Δh,同時用Δh1表示開泵水位變化率,用Δh2表示警戒水位變化率,根據前面所介紹的規則確定開泵臺數后,如果Δh>Δh2,那么就開啟兩臺水泵,直到Δh1<Δh<Δh2,如果開啟兩臺水泵仍無法將水位變化率降低到合理的范圍內,就響鈴報警。
4 PLC軟件系統設計
智能排水系統需要實現的功能比較多,本文重點介紹系統自動運行程序和控制策略實現程序。
系統在開始啟泵需要先預警10 s,查看是否有故障預警,各個閥門是否開關到位,當這些條件都滿足之后,就要開啟射流閥開始抽真空;同時利用真空傳感器檢測真空度是否達到要求,如果達到要求就開啟電機,然后關閉真空閥和射流閥;這之后就要開始檢測水泵出水口壓力,當壓力達到要求后就開啟電動閘閥開始正式排水。如果抽真空時遲遲達不到想要的真空度,開啟水泵后,出水口達不到預期的壓力,那么就要進行故障報警,并關閉出水閘閥以及電機。自動啟停泵流程圖如圖6所示。
圖7為基于“避峰就谷”的優化調度軟件實現流程。計算過程中需要的一些參數包括水倉的底面積、容量,管道直徑,水泵排水量等,可以通過企業獲得,而其他一些參數包括峰段和谷段的時間,工作人員可以直接通過上位機或者觸摸屏輸入。優化調度策略軟件實現流程圖如圖7所示。
5 上位機組態軟件設計
通過上位機組態界面,工人可以實時監測系統的運行狀態和系統的控制模式,同時還可以查閱系統的歷史故障記錄,上位機主界面如下頁圖8所示。
6 結語
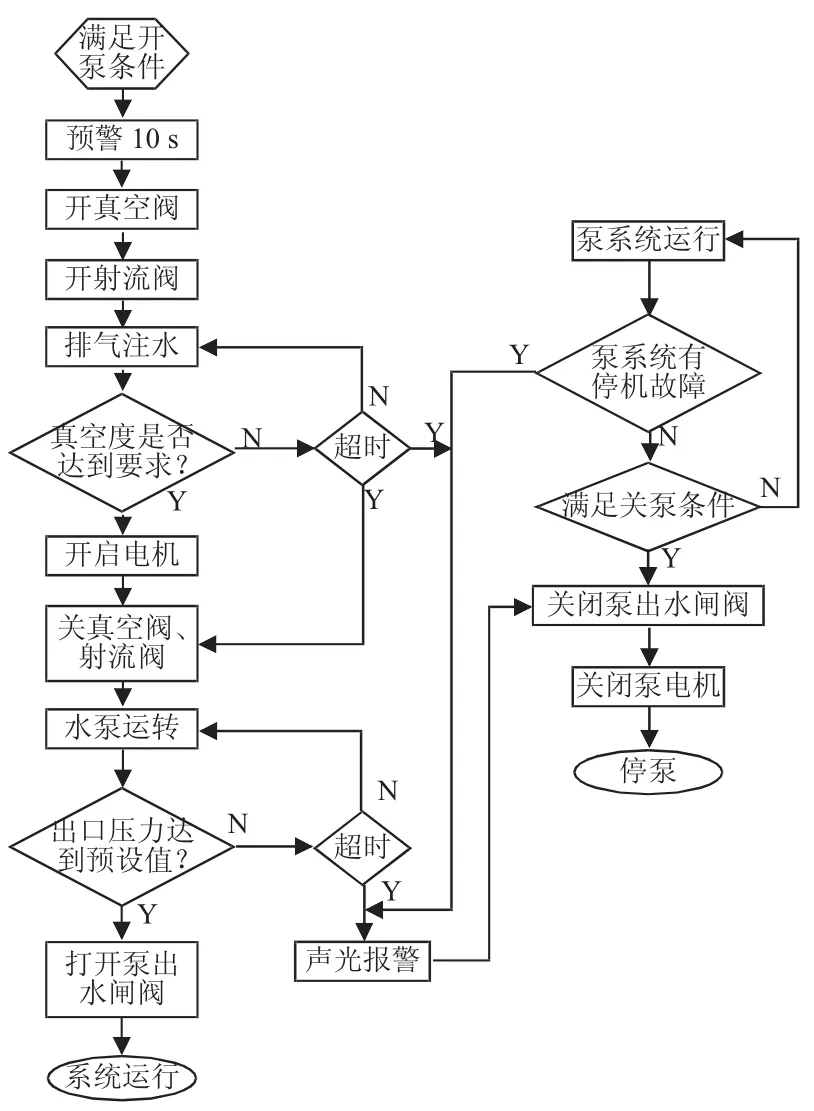
圖6 水泵自動啟停泵流程圖
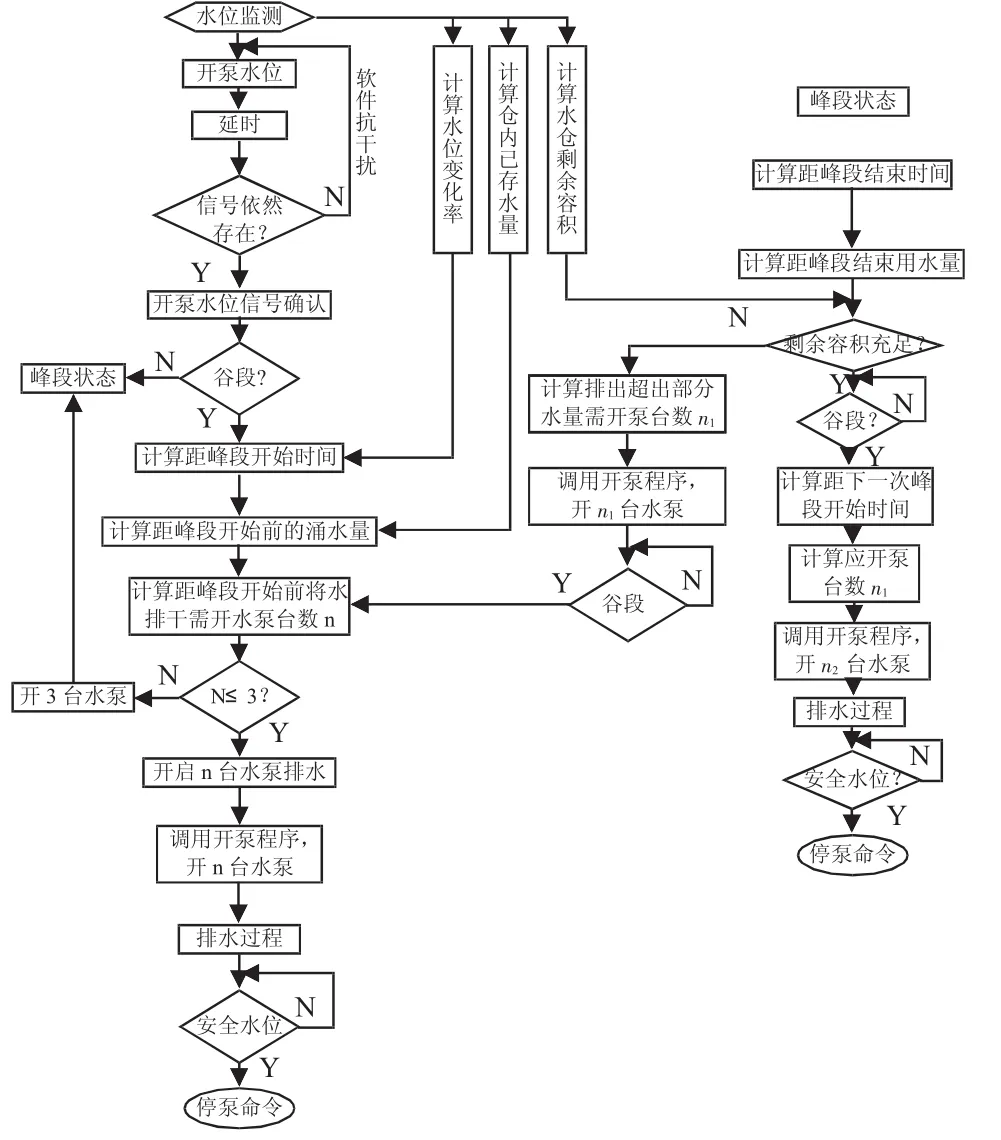
圖7 “避峰就谷”優化調度策略的軟件實現流程圖
以PLC控制器為核心設計的這套可以實現自動運行和遠程監控的智能排水系統可以全面監控系統運行的參數,包括電機電流、繞阻溫度、水倉水位、離心泵真空度等,當發生故障時能夠迅速報警并可靠動作。在此基礎上對現有控制策略進行了改進,節省了電費開支,也降低了安全風險。經過現場測試能夠滿足“智慧礦山”的發展趨勢。
[1]譚一川.煤礦工業水泵自動化監控系統研究與應用[D].重慶:重慶大學,2009.
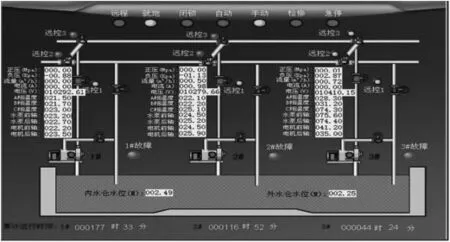
圖8 上位機主界面
[2]植海深,盧德明,張應紅,等.礦井自動排水系統綜述[J].大眾科技,2012(6):12-15.
[3]劉玉英,邢泉水,姜裕慶.水泵自動化監控系統的應用[J].2008(4):51-53.
[4]李杰.煤礦井下排水系統運行可靠性研究與控制系統研究[D].太原:太原理工大學,2010.
[5]杜桂遷.煤礦井下排水系統自動化的研究[D].邯鄲:河北工程大學,2013.
[6]臧其亮.煤礦井下排水系統優化調度與智能控制[D].徐州:中國礦業大學,2010.
[7]程倫新.井下自動排水系統控制策略的研究[D].阜新:遼寧工程技術大學,2011.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00