直升機相控陣毫米波防撞雷達信號處理技術研究
2018-01-30 12:14:35孫棟梁浩
電子技術與軟件工程 2017年15期
孫棟+梁浩


摘要:在惡劣的氣候條件下,直升機在搜救、低空作業的時候易受到低空飛行走廊上的山丘、樹木、電力線、建筑物等影響,給飛行安全帶來極大隱患,而國內對直升機防撞相關領域的研究相對較少。本文利用雷達實飛數據開展信號處理檢測技術的研究,驗證了數字陣毫米波雷達目標檢測算法的可行性,既能準確檢測目標,同時又控制了虛警率,取得很好的效果。
【關鍵詞】防撞 數字陣 目標檢測 虛警率
毫米波雷達具有頻帶寬、天線副瓣低、波束窄、抗干擾能力強、體積小、分辨力高等優點,可在惡劣的氣候條件下全天候工作,因此,毫米波雷達在很多領域具有較大的發展潛力。目前,直升機在搜救、低空作業的時候,低空飛行走廊上的山丘、樹木等自然物體及電力線、電線桿、建筑物等都會對直升機的安全飛行帶來極大隱患,且故障率較高,典型場景見圖1。據統計,各類事故中,碰撞引起的比例約占35%,因此加強雷達防撞技術研究具有很大的意義。漏檢導致事故,虛警同樣無法忍受,會給飛行員的判斷產生極大干擾,如何安全可靠地回避障礙物是一個難點。本文通過實際試飛數據來驗證數字陣毫米波雷達信號處理算法的可行性,處理流程主要包括目標檢測、副瓣抗干擾、精確測高、測角等方而全而提高障礙物的檢測能力。
1 目標檢測技術
1.1 常規單元平均CFAR檢測技術
本文研究的被測目標主要包括電力線、山體、高樓等靜止目標,在多普勒域無法區分,因此整個檢測區域都在雜波區。單元平均CFAR處理(快門限)主要作用于雜
波區,用于抑制剩余雜波的影響,即以檢測點附近單元為參考單元,左右參考單元平均值選大為門限閾值,前后各一個保護單元,圖2為單元平均CFAR選大處理框圖。
然而,本文涉及到的一些障礙物回波信號寬于發射脈寬,目標能量會延伸到參考單元中,且跨越距離門的長度不固定,一些山體能跨十幾個甚至更多距離門,常用的單元平均CFAR檢測技術無法固定的選擇合適的距離保護單元,會導致部分目標信息參與到參考單元中,降低信噪比,極大減弱系統檢測能力,導致漏檢,不適用于防撞檢測。
針對障礙物存在跨多距離門特性,本文采用了一種自適應單元平均恒虛警檢測技術,能動態剔除異常干擾大值,選擇合適的參考單元值,在保證虛警率的同時可以提升系統的檢測力。
1.2 自適應CFAR檢測技術
自適應CFAR檢測不設置固定的保護單元數,通過在被平均單元內自動篩選,獲得參考單元值,并實現目標的CFAR檢測。工作流程參考圖3。
1.2.1 樣本選擇
首先,取被測信號的前后各N/2個樣本點,當信號在左右兩側時,取N個樣本做單邊檢測,對N個樣本進行均值統計。
2 副瓣干擾抑制
盡管毫米波雷達具有高增益、低副瓣特點,但副瓣的影響依然存在,尤其在近地飛行過程中,副瓣干擾會嚴重影響目標檢測及定位。為了剔除副瓣干擾,本文利用數字陣多子陣問的相位特性及相關性,采用了子陣問的相關法判干擾技術進行主副瓣判斷,能夠有效進行干擾抑制,剔除副瓣干擾信息。
相關原理:
2.1 干擾判斷
以8通道數字陣為例,假設存在一個目標和一個干擾,則第p個子陣的接收信號可表示為
3 目標的測角和測高
防撞雷達不僅需要判斷障礙物的有無,同時需要獲取障礙物精確的位置和高度信息,飛行員可以提前預判,確保能安全避開障礙物。毫米波雷達本身具有波束窄、角分辨率高等優點,在測角方而具有天然的優勢。通過對角誤差的補償來獲得精確的方位角和俯仰角,從而計算目標的相對高度及方位。
根據子陣的之問的位置分布,需要對目標信號進行和通道、方位差和俯仰差的合成。
3.2 計算高度,精確測高
4 實測數據處理和分析
輸入參數如表1。
圖4為不同檢測門限下兩種不同的CFAR處理結果對比圖。
從數據分析可知,圖4中有兩個目標,近距為目標1,跨13個距離門,遠距為目標2,跨15個距離門,目標1峰值點信雜比約為15dB,谷值點信雜比約為9.5 dB,目標2峰值點信噪比約為16dB,谷值點信雜比約為lOdB。以上4幅圖分別為門限系數3.0,3.5,4.0和4 5的檢測結果,從不同門限的檢測結果來分析,被測目標均在常規CFAR檢測(曲線1)門限以下,常規單元平均CFAR無法檢出目標;而自適應CFAR檢測方式則不同,隨著檢測門限(曲線2)的變化,目標整體能被穩定檢出,只是隨著檢測門限的降低,虛警逐漸增多。由此可見,一旦檢測門限系數選擇合理,在不確定目標跨多少距離門的情況下,采用自適應檢測技術能較好的檢測目標。
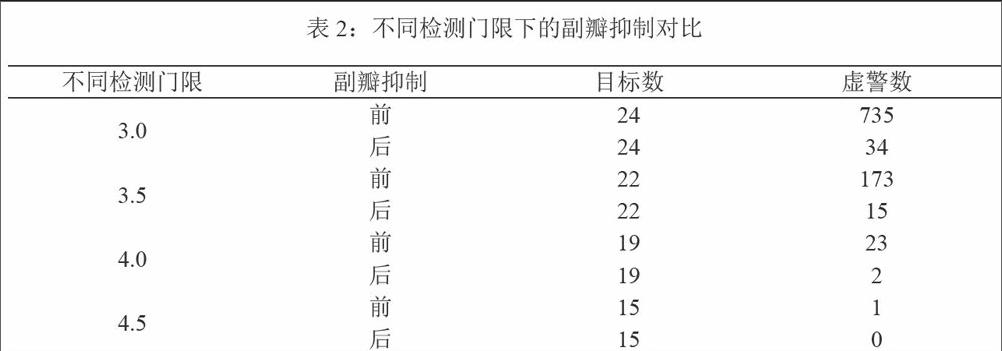
通過表2對比分析,不同的檢測門限下,副瓣抑制對目標的沒有影響,而對雜波有著明顯的抑制。在檢測門限為3.0時,由于門限偏低,虛警太多;而檢測門限4 5時,目標個數偏少。因此選擇3.5和4.0的檢測門限較為合理,此時虛警個數降低到約10%,效果明顯。目前該檢測結果為單幀檢測,經過后續幀問積累可進一步降低虛警率,在此不做詳細介紹。
5 結論
本文通過對直升機數字陣毫米波防撞雷達的信號處理技術進行了研究,針對障礙物跨多個距離門的特性,開展了針對性的算法研究,包括優化的CFAR檢測技術、副瓣抑制、目標測角測高技術等,采用了自適應單元平均CFAR檢測,很好地解決了常規檢測無法檢測的問題,同時,利用數字陣多通道進行副瓣干擾抑制,能夠較好的抑制雜波虛警,最后通過角誤差計算獲得目標的精確位置,能夠輔助飛行員規避障礙物,取得了很好的效果。
參考文獻
[1]余宏明,張志堅.毫米波雷達及對抗船舶電子工程[M].北京:國防工業出版社.2007(02):168-172
[2]向敬成,張明友.毫米波雷達及其應用[M].北京:國防工業出版社,2005(08).
[3]徐艷國,直升機防撞雷達關鍵技術及發展趨勢[J].現代雷達,2011(02).
[4]杜鵬飛,張祥軍.單元平均恒虛警率檢測中的一個新結論[J].現代雷達,2007(02):60-62.
[5]都基炎,胡軍,張百順,七種恒虛警率處理方案及性能分析[J].現代雷達,2004,26(04).
[6]熊紅林,等.毫米波有源相控陣技術在直升機火控雷達中的應用[J],現代雷達,2013(08).
[7]王永良,空時自適應信號處理[M].北京:清華大學出版社,2001(01).
[8]舒汀,陳新竹.子陣級數字波束形成抗多主副瓣干擾及測角技術[J].現代雷達,2016(12).endprint
