多傳感器組網技術研究
2018-01-30 21:52:05丁源
電子技術與軟件工程 2017年15期
關鍵詞:多傳感器
丁源
摘要:多傳感器組網探測技術是現代艦艇中一個高度復雜而重要的問題。復雜多元的戰場信息環境和聯合指揮控制一體化要求艦艇作戰系統能夠很好地利用多傳感器技術。雷達、聲納和艦外數據等數據探測和作戰融合技術在分布式和并行式的的作戰系統中得到了越來越多的應用。在分析作戰系統協同作戰的主要內容和需求的基礎上,對艦船多傳感器組網技術的組成和信息實現處理進行了比較研究,分析了艦船多傳感器數據處理的方法,為軍種間協同作戰數據處理的解決提供了新的研究思路。
【關鍵詞】組網 多傳感器 數據融合
作戰系統日益復雜化和多節點化,使得作戰系統指控協同成為世界各國研究的熱點問題。未來作戰系統的信息化和體系化要求分布廣泛地海域、空域等作戰單元聯合起來,充分利用雷達探測、聲納探測等傳感器技術,以信息的獲取、融合處理、傳輸和共享為基礎,使多種武器平臺、多個傳感器與指控節點有機結合起來。水而艦艇就是當今人類社會所建造的武器裝備密集度最高的作戰平臺。
針對綜合控制體制的現代水而艦艇,其高效和實時作戰能力除了需要分布式的雷達和聲納等實時數據外,還需要在指揮與控制系統下的并行數據處理能力。通過一體化作戰,廣泛分布的各個艦船通過使用多傳感器數據聯合武器進行協同作戰,使得參戰部隊能夠在各種層次上充分了解目標態勢和敵我情況,共享傳感器的數據,從而可以擴大作戰空問,提高部隊的實際作戰能力和探測能力。本文在對這些作戰要素分析的基礎之上,對作戰系統軍種問協同提供了一定的理論啟示和參考價值。
1 作戰系統數據需求和技術分析
現代戰爭要求對作戰空問的感知和探測,必然大大要求提高觀測、定位的能力。這不僅需要不斷提高單個傳感器節點的信息獲取能力,單部雷達或單個聲納探測器已經很難與電子對抗系統全而抗衡,如今的美軍早已經發展到體系作戰模式,都是多傳感器進行數據采集與融合,更為重要的是將多個傳感器的信息進行共享以極大提高戰場信息感知和探測能力。
實時性和高效性要求這些多傳感器數據進行融合,就是把多個相同或不同類型的傳感器所提供的局部觀察量加以綜合,例如雷達、聲納探測設備等,消除數據之問的冗余和矛盾,利用數據互補,形成對環境的相對完整一致的感知描述,從而提高指揮系統決策的快速性和正確性。
1.1 作戰系統數據需求
早期的艦艇都是單一傳感器探測數據,若誤差偏差較大,對戰場態勢不能精準定位,極大地影響作戰能力。作戰系統數據應該滿足以下幾個條件:
1.1.1 情報信息源的多元化
由于單一情報源對目標探測范圍有限和精準度不高,情報信息應該包含多個平臺傳感器收集的信息,達到早期預警。
1.1.2 信息識別和數據識別的多元化
單一的依靠敵我識別來識別目標屬性或根據有限的偵察手段來確定目標的類型的局限性,要求信息識別和數據識別多元化、常態化。
1.2 多傳感器組網探測技術
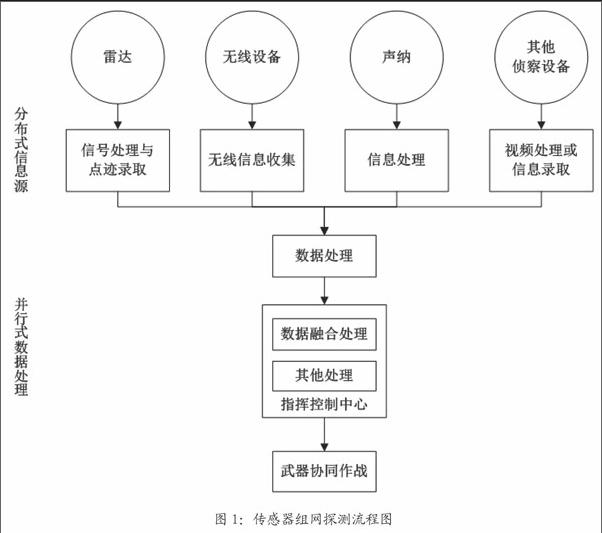
多傳感器組網探測技術就是指將多個或多種不同體制、不同頻段和不同工作模式的雷達、聲納、電子偵察設備或無線通信設備等鏈接成網,由指揮控制系統統一調配,形成一個整體。在網的各傳感器將收集到的情報信息按照統一時空坐標發送給指揮控制中心,并根據戰場態勢情況適時地調整各自的狀態,完成作戰范圍內的探測、定位跟蹤和協同打擊任務。
多傳感器組網探測增強了單個傳感器系統的生存能力、擴展了空問覆蓋范圍、增加了系統的探測能力和檢測概率,增加了數據信息來源的可信度,減少了目標或事件的不確定性和不穩定性(若某一傳感器故障,可以通過其他傳感器協同進行數據探測)。圖1是多傳感器組網探測的數據原理圖。
2 分布式和并行式條件下的數據融合
多傳感器探測到的目標存在類別、屬性和特性的區別,數據融合也稱多傳感器信息融合技術就是要將這些不同類、不同平臺傳感器等獲取的信息進行多級別、多方位的綜合分析與比較,通過與其他數據進行比較處理,數據融合技術能更高效、精準地提供戰場態勢。
2.1分布式信息源
傳感器存在種類、波段、工作方式等不同,常見的信息源包含以下幾類:
(1)雷達是利用電磁波探測目標的電子設備,它可以發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息,所以雷達可以精確地測定目標的徑向距離。
(2)紅外探測是一種無線通信方式,通過接收目標表面的輻射場獲取目標的信息。
(3)聲納探測是利用聲波在水下的傳播特性,通過電聲轉換和信息處理,完成水下探測和通訊任務的電子設備。它有主動式和被動式兩種類型,主動聲納通過發送聲波和接收回波信息來判別目標的航速和航向等信息,被動聲納通過接收回波信息來探測目標的方位和徑向速度等信息。
(4)其他電子偵察設備通過使用專門的電子技術設備進行偵察。
2.2 并行式數據集成和融合處理
指揮控制系統通過接收分布式的信息數據,由于多個傳感器可以獲得多個目標特性、類別等,為了在對目標進行探測和識別時具有更精準的結果,利用融合技術實現了例如動態目標的精確定位和形態、狀態等估計。多傳感器的數據集成和融合處理方式如下:
2.2.1 時空坐標統一
數據融合必須要保證時間對準和空間坐標的統一,即將同一目標或同一區域內的目標所關聯的傳感器同步到同一基準時間,保證分布式數據處理的精準性;而空間坐標統一主要針對指揮控制系統接收多數據源的數學建模和轉換上,利用相對坐標系或大地坐標系來解算目標或探測區域的坐標信息,保證態勢空間的一致性和一體化。
2.2.2 多傳感器數據的協調管理
用于將多個傳感器統一在一個共同的時間和空間參考系,把同一類別、同一層次的傳感器數據轉化成同一種表達形式進行數據配準、標校處理,然后將不同傳感器對相同目標的探測信息進行關聯。
2.2.3 數據相關融合處理
數據相關融合處理包括分布式信息源的點跡相關和指揮控制系統的航跡相關,各傳感器間存在精度差異,不同傳感器對不同區域、不同屬性類別的目標感知度不同,應依據優先級別逐一進行數據處理。
3 結束語
分布式協同探測和并行式的融合數據處理是實現跨平臺的重要技術基礎,在這個基礎上,實現跨平臺的傳感器探測和武器協同指揮與控制,通過戰場態勢管理和通信技術,形成各級指揮中心統一與一致的戰場綜合態勢,促進戰場態勢的探測能力和作戰能力。
參考文獻
[1]梁軍,石劍琛.網絡化作戰系統一指揮控制中樞的革命[J].中國艦船研究,2007 (02).
[2]徐敬,楊紹清,許林周,多武器協同的復雜性分析與Agent方法[J],火力與指揮控制,2007 (07).
[3]陳嫣,何佳洲,多平臺協同防空作戰系統數據融合技術研究[J].艦船電子工程,2006 (03).
[4]何保林,多雷達航跡關聯與融合技術研究[D].北京:北京工業大學.2010.
[5] Saurabh Mit tal, Margery J.Doyle, Eric Wa tz. Detect ing Intelligent Agent Behavior with Environment Abstraction in Complex Air Combat Systems[J]. Approval given by 88 ABW-2013-0898,February,2013.endprint
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
