基于虛擬儀器與PCI—1711U的三軸滑臺(tái)控制系統(tǒng)設(shè)計(jì)
2018-02-01 11:14:35張新良馬明全
軟件導(dǎo)刊 2018年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
張新良+馬明全

摘要:介紹了一種基于虛擬儀器技術(shù)和PCI-1711U控制卡的三軸滑臺(tái)控制系統(tǒng)設(shè)計(jì)方案,利用控制卡的數(shù)字量輸出功能,產(chǎn)生控制步進(jìn)電機(jī)的脈沖信號(hào),控制轉(zhuǎn)動(dòng)角度和速度。使用虛擬儀器LabVIEW作為開發(fā)工具,利用多線程并行運(yùn)行機(jī)制和數(shù)據(jù)采集DAQ函數(shù),分別為各自由度上的電機(jī)控制分配線程,實(shí)現(xiàn)控制矢量的輸出,克服了傳統(tǒng)步進(jìn)電機(jī)控制系統(tǒng)編程復(fù)雜不易修改的困難。結(jié)果表明,基于虛擬儀器和PCI-1711U控制卡的滑臺(tái)控制系統(tǒng)能實(shí)現(xiàn)三維空間中,點(diǎn)到點(diǎn)的定位。此系統(tǒng)可應(yīng)用于3D打印、智能數(shù)控機(jī)床等領(lǐng)域,為三維空間中運(yùn)動(dòng)的控制提供了一種設(shè)計(jì)方法,相比于傳統(tǒng)控制方法具有優(yōu)勢(shì)。
關(guān)鍵詞:三軸滑臺(tái);虛擬儀器;PCI-1711U;步進(jìn)電機(jī);多線程
DOIDOI:10.11907/rjdk.172223
中圖分類號(hào):TP319
文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào)文章編號(hào):1672-7800(2018)001-0102-03
Abstract:A control system is proposed for an XYZ 3-axial sliding table driven by step motor in this paper. A PCI-1711U control card is adopted for the generation of the PWM to control the angle and rotation velocity of the motor through its digital output interface. Meanwhile, the virtual instrument software, i.e. LabVIEW is introduced for the construction of the control system. The capability of multi-thread parallel operation mechanism and Data-Acquisition (DAQ) function is utilized to generate respective control vectors for the step motors simultaneously, overcome the difficult of traditional stepper motor control system programming complex and not easy to modify. The experimental results have shown that the sliding table control system based on virtual instrument and PCI-1711U control card can achieve point-to-point positioning in three-dimensional space. This system can be applied to 3D printing, intelligent CNC machine tools and other fields. It provides a design method for motion control in three-dimensional space. It also gives a more friendly and intuitive interface compared to the traditional control systems.
Key Words:3-axis sliding table; virtual instrument; PCI-1711U; step motor; multi-thread
0引言
步進(jìn)電機(jī)直接將數(shù)字脈沖信號(hào)轉(zhuǎn)化成為角位移或直線位移脈沖信號(hào),作為控制電機(jī)和驅(qū)動(dòng)電機(jī)使用時(shí)具有轉(zhuǎn)子慣量低、定位精確度高、控制簡單等特點(diǎn),因此步進(jìn)電機(jī)在精密儀器、醫(yī)療器械、半導(dǎo)體加工等諸多領(lǐng)域具有廣泛應(yīng)用價(jià)值[1]。傳統(tǒng)的步進(jìn)電機(jī)控制主要是基于處理器的,如單片機(jī)[2]、可編程邏輯控制器(PLC)[3]、DSP[4]等設(shè)備,這些設(shè)備往往存在電路靈活性差、不易調(diào)整、編程復(fù)雜、穩(wěn)定性差等不足。本文研究使用PCI-1711U數(shù)據(jù)采集控制卡實(shí)現(xiàn)對(duì)三軸滑臺(tái)步進(jìn)電機(jī)的開環(huán)控制,利用其獨(dú)立的處理器、帶緩沖隔離、總線主控以及即插即用的特點(diǎn),克服傳統(tǒng)步進(jìn)電機(jī)控制方案的不足[6]。同時(shí),利用圖形化編程語言的虛擬儀器LabVIEW技術(shù),設(shè)計(jì)開發(fā)控制系統(tǒng)的上位機(jī)及控制算法,提高系統(tǒng)的編程靈活性和系統(tǒng)的穩(wěn)定性。
1三軸滑臺(tái)運(yùn)動(dòng)控制系統(tǒng)
三軸滑臺(tái)運(yùn)動(dòng)控制系統(tǒng)的整體框架如圖1所示。此系統(tǒng)以步進(jìn)電機(jī)作為驅(qū)動(dòng)設(shè)備,上位機(jī)控制器根據(jù)預(yù)期指令控制目標(biāo),產(chǎn)生決策命令并生成控制矢量,控制PCI-1711U控制卡輸出脈沖信號(hào)送給電機(jī)驅(qū)動(dòng)器,控制步進(jìn)電機(jī)按照期望動(dòng)作。系統(tǒng)的控制可以是開環(huán)控制或閉環(huán)控制,也可以是速度或位置控制。
2系統(tǒng)硬件設(shè)計(jì)
2.1步進(jìn)電機(jī)及驅(qū)動(dòng)器
三軸滑臺(tái)經(jīng)步進(jìn)電機(jī)驅(qū)動(dòng),絲桿機(jī)械傳動(dòng),控制其在三維空間中運(yùn)動(dòng),如圖2所示。步進(jìn)電機(jī)為PK-569-A高轉(zhuǎn)矩低震動(dòng)五相步進(jìn)電機(jī),基本步距角為0.72°,可使用驅(qū)動(dòng)器進(jìn)行2細(xì)分,半步進(jìn)驅(qū)動(dòng)方式步距角為0.36°。XYZ軸的絲桿導(dǎo)程分別為20mm、20mm和2mm,步距角和絲桿導(dǎo)程可為實(shí)現(xiàn)開環(huán)定位提供計(jì)算依據(jù)[3]。
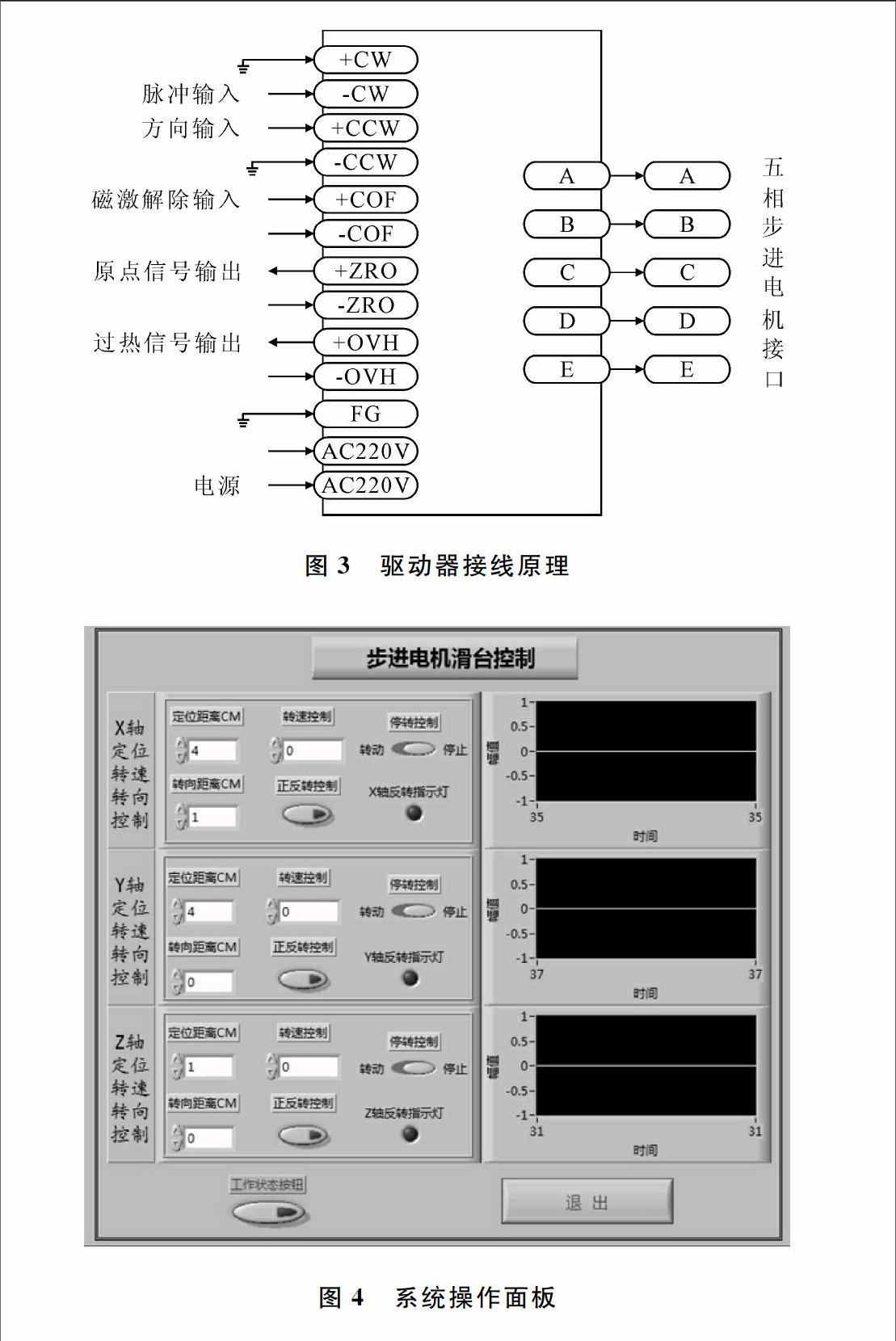
步進(jìn)電機(jī)驅(qū)動(dòng)器為SD528,有16種驅(qū)動(dòng)電流,每相最高達(dá)1.4A。可接收單脈沖(1P)或雙脈沖(2P)輸入方式,和采用全步進(jìn)(每步0.72°)或半步進(jìn)(每步0.36°)驅(qū)動(dòng)方式,驅(qū)動(dòng)器接線如圖3所示。驅(qū)動(dòng)器脈沖輸入方式為下降沿觸發(fā),即無脈沖信號(hào)輸入時(shí),維持高電平。雙脈沖輸入控制時(shí),CW端的脈沖控制步進(jìn)電機(jī)順時(shí)針旋轉(zhuǎn),CCW端的脈沖控制步進(jìn)電機(jī)逆時(shí)針旋轉(zhuǎn)。單脈沖輸入控制時(shí),CW端脈沖控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的角度和速度,CCW端的高/低電平則控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)方向。本系統(tǒng)采用單脈沖輸入方式,CW和CCW采用共陰極接線方式。endprint
2.2PCI-1711U運(yùn)動(dòng)控制卡
PCI-1711U是研華公司生產(chǎn)的一款多功能PCI總線數(shù)據(jù)采集控制卡,其模塊化儀器通訊總線具有最常用的測量和控制功能,如16路單端或8路差分12位模擬量采集輸入(AI)、16路數(shù)字量輸入(DI)、16路數(shù)字量輸出(DO)、2路12位模擬量電壓輸出及可編程計(jì)數(shù)器/定時(shí)器功能。在本運(yùn)動(dòng)控制系統(tǒng)中,選取數(shù)字量輸出端口DO4、DO7、DO3分別作為X軸、Y軸、Z軸的步進(jìn)電機(jī)驅(qū)動(dòng)器的CCW端口信號(hào)輸入端口,通過控制三端口的高低電平輸出,實(shí)現(xiàn)對(duì)XYZ三軸步進(jìn)電機(jī)運(yùn)動(dòng)的控制。選取數(shù)字量輸出端口DO2、DO5、DO1分別作為步進(jìn)電機(jī)驅(qū)動(dòng)器的CW端口脈沖信號(hào)輸入端口,通過控制脈沖頻率的高低,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)轉(zhuǎn)速的控制。
PCI-1711U控制卡進(jìn)行硬件電路連接時(shí),需要通過兩端針型接口的68芯SCSI-II電纜,連接至接線端子板,如圖4所示。本系統(tǒng)采用PCL-10168型雙絞線電纜,模擬信號(hào)和數(shù)字信號(hào)分開屏蔽,從而最大程度降低信號(hào)干擾,并解決EMI/EMC問題。DIN導(dǎo)軌安裝的接線端子板完成各種輸入輸出信號(hào)線的連接,其68個(gè)接線端子與控制卡一一對(duì)應(yīng)。在后續(xù)工作中,還可以利用PCI-1711U采集控制卡的AI和DI端口,采集位移傳感器及限位開關(guān)的信號(hào),進(jìn)一步完善控制系統(tǒng)。
3系統(tǒng)軟件設(shè)計(jì)
在本系統(tǒng)中,使用虛擬儀器LabVIEW技術(shù)設(shè)計(jì)開發(fā)三軸滑臺(tái)運(yùn)動(dòng)控制系統(tǒng)的軟件系統(tǒng)[5],管理PCI-1711U采集控制卡的操作,提供用戶和控制系統(tǒng)的接口。
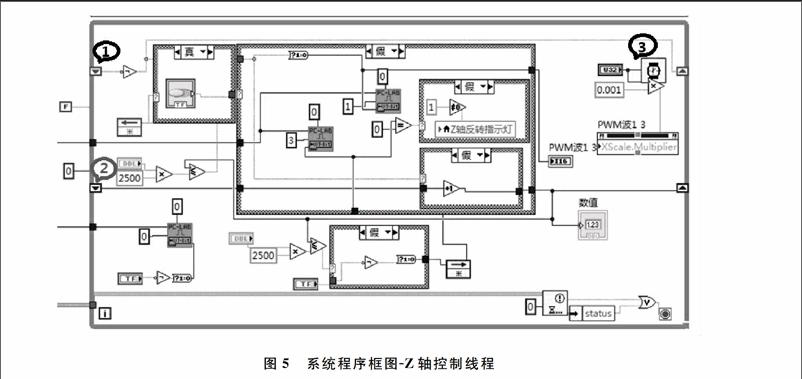
利用虛擬儀器的多線程同步技術(shù),分別為XYZ軸上的步進(jìn)電機(jī)分配控制線程,根據(jù)預(yù)期的控制目標(biāo),生成各自由度上的控制矢量。控制矢量經(jīng)PCI-1711U控制卡的數(shù)字量輸出端送入驅(qū)動(dòng)器,控制步進(jìn)電機(jī)的運(yùn)動(dòng)狀態(tài),實(shí)現(xiàn):①通過控制步進(jìn)電機(jī)來獨(dú)立控制各自由度上點(diǎn)到點(diǎn)的運(yùn)動(dòng);②各自由度上步進(jìn)電機(jī)的加速、減速獨(dú)立控制;③根據(jù)各自由度上設(shè)定的定位距離和轉(zhuǎn)向距離,生成控制矢量(脈沖頻率和個(gè)數(shù)),具有位置跟蹤功能。設(shè)計(jì)的人機(jī)交互面板如圖4所示,對(duì)應(yīng)Z軸控制線程的程序如圖5所示。
在程序?qū)崿F(xiàn)上,利用移位寄存器和“布爾至脈沖轉(zhuǎn)換.vi”生成PWM波并對(duì)脈沖計(jì)數(shù),如圖5的①和②處。通過調(diào)節(jié)定時(shí)器的定時(shí)周期來控制PWM波的頻率,如圖5中③處。進(jìn)而,由PWM波的頻率和個(gè)數(shù)變化來控制步進(jìn)電機(jī)的轉(zhuǎn)速和線位移[8]。程序中SelectDecivePop.vi、DeciveOpen.vi、DIO WriteBit.vi為PCI-1711U運(yùn)動(dòng)控制卡的LabVIEW函數(shù),分別完成選擇硬件設(shè)備、打開硬件設(shè)備和寫硬件設(shè)備數(shù)字量并輸出的功能。
對(duì)于滑臺(tái)各自由度上的位置跟蹤功能,可根據(jù)步進(jìn)電機(jī)的步距角及絲桿導(dǎo)程計(jì)算生成控制矢量來實(shí)現(xiàn)。本滑臺(tái)X、Y軸步進(jìn)電機(jī)配套的絲桿導(dǎo)程為20mm,Z軸絲桿導(dǎo)程為2mm,步進(jìn)電機(jī)的驅(qū)動(dòng)器為全步進(jìn)方式(步距角為0.72°),則X、Y軸的脈沖當(dāng)量為D=20*0.72/360=0.04,Z軸脈沖當(dāng)量為0.004。因此,若X軸移動(dòng)40mm,則需要1 000步進(jìn)脈沖,同理,可計(jì)算YZ軸的控制矢量數(shù)據(jù)。
經(jīng)實(shí)驗(yàn)測試,所設(shè)計(jì)的三軸滑臺(tái)控制系統(tǒng)運(yùn)行穩(wěn)定,可靠地實(shí)現(xiàn)了三維空間中,點(diǎn)到點(diǎn)的定位,且界面友好。另一方面需要說明的是,考慮到在本系統(tǒng)中PWM波的頻率控制是利用Windows系統(tǒng)的定時(shí)器實(shí)現(xiàn)的,因此頻率上限只能達(dá)到1kHz,對(duì)于頻率要求更高的場合,可結(jié)合硬件資源,利用PCI-1711板卡的可編程定時(shí)器及虛擬儀器的定時(shí)循環(huán)結(jié)構(gòu)來實(shí)現(xiàn),此處不再贅述。
4結(jié)語
本文介紹了基于虛擬儀器LabVIEW和PCI-1711U運(yùn)動(dòng)控制卡的三軸滑臺(tái)控制系統(tǒng)的設(shè)計(jì)。該系統(tǒng)擺脫了傳統(tǒng)控制系統(tǒng)完全依賴處理器的缺點(diǎn),編程簡單、操作簡便、系統(tǒng)操作界面直觀友好。實(shí)驗(yàn)測試結(jié)果表明該系統(tǒng)達(dá)到了較好的控制效果,可靠地實(shí)現(xiàn)了三維空間中點(diǎn)到點(diǎn)的定位。此系統(tǒng)可應(yīng)用于3D打印、智能數(shù)控機(jī)床等領(lǐng)域,為三維空間中運(yùn)動(dòng)的控制提供了一種設(shè)計(jì)方法。同時(shí)LabVIEW提供的強(qiáng)大函數(shù)庫,可大大減少非計(jì)算機(jī)專業(yè)人員的開發(fā)時(shí)間,提高工作效率,相比于傳統(tǒng)控制方法更具有優(yōu)勢(shì)。
參考文獻(xiàn):
[1]孫秀桂,趙兵.基于labVIEW的步進(jìn)電機(jī)控制器的設(shè)計(jì)[J].大理學(xué)院學(xué)報(bào),2008,7(12):68-71.
[2]張占立,康春花.基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)[J].電機(jī)與控制應(yīng)用,2011,38(3):28-31.
[3]王彥軍,李增生.基于PLC的步進(jìn)電機(jī)控制[J].科學(xué)技術(shù)與工程,2011,11(5):1707-1709.
[4]張寶發(fā),趙輝,岳有軍.基于DSP的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)[J].儀表技術(shù)與傳感器,2010(8):63-65.
[5]陳方泉,李建周,馬思文.基于LabVIEW的步進(jìn)電機(jī)驅(qū)動(dòng)設(shè)計(jì)及其應(yīng)用[J].上海大學(xué)學(xué)報(bào),2006,12(1):89-92.
[6]李進(jìn)杰,高偉.基于LabVIEW的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)[J].機(jī)械與電子,2010(15):85-86.
[7]楊林,方宇棟.LabVIEW控制步進(jìn)電機(jī)[J].微計(jì)算機(jī)信息,2004,20(2):7-8.
[8]曹衛(wèi)彬.虛擬儀器典型測控系統(tǒng)編程實(shí)踐[M].北京:電子工業(yè)出版社,2012:117-132.
[9]毛計(jì)慶.labVIEW——快速構(gòu)建步進(jìn)電機(jī)控制系統(tǒng)的利器[J].電機(jī)與控制應(yīng)用,2009,36(1):30-32.
(責(zé)任編輯:劉亭亭)endprint
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17