干式DCT駐車機構性能分析與試驗
2018-02-05 05:15:57張磊何建濤馮飛谷葉水
汽車技術 2018年1期
關鍵詞:模型
張磊 何建濤 馮飛 谷葉水
(1.格特拉克(江西)傳動系統有限公司,南昌 330013;2.格特拉克亞太傳動系統技術有限公司,上海 201203)
1 前言
駐車機構是DCT主動安全設計中防止車輛以較高的速度掛P擋或防止車輛在坡道滑行的一種安全裝置。DCT駐車機構的設計關乎乘客在極端工況下的生命安全,是DCT設計中非常關鍵的主動安全設計。因此,對駐車機構進行分析研究特別有意義。陳華等[1]研究了變速器駐車機構從P擋換到R擋時的自動彈出力。劉詩等[2]研究了某自動變速器駐車機構駐車速度、坡道自鎖能力以及坡道P擋拔出力矩等,但是未真實再現坡道拔出力矩真實值,臺架試驗與整車試驗值可能有不小的偏差。張玉文等[3]使用多體動力學軟件Recur?Dyn建立了包含多缸體、多彈性體等非線性多體模型的變速器駐車機構多體動力學模型,分析了P擋與R擋互相切換時的換擋性能,但未考慮平路允許掛擋最高車速。王明成[4]在考慮整車動力性和經濟性設計要求的前提下,研究了雙離合器自動變速器關鍵零部件結構、布置和性能,雖涉及駐車機構研究,但是對其詳細設計及驗證過程研究較少。
2 駐車機構
DCT駐車機構一般采用機械式驅動機構,而不采用液壓式或氣動式,主要原因是后者容易發生故障。駐車機構的設計,需滿足以下使用要求:
a.允許汽車在較小的車速時掛入P擋。推薦臨界掛入車速為2.4~5.6 km/h,即車速低于2.4 km/h時駐車機構一定要能鎖住變速器,高于5.6 km/h時駐車機構一定不能鎖住變速器。
b. 汽車正常行駛工況,尤其是高速行駛中,不允許掛上P擋。即車速較高時,即使外部操縱桿執行了掛P擋操作,變速器駐車機構中的扭簧等組件也必須保證棘爪不能鎖住棘輪,亦即無法掛入P擋。
c.當汽車駐車后,尤其是在坡道上,駐車機構不能脫擋。
2.1 駐車機構設計
DCT駐車機構作為汽車制動可靠性主要部件之一,其結構示意如圖1所示。

圖1 駐車機構結構示意
2.2 工作原理
駐車機構主要用于控制汽車安全運行,其主要工作原理如下:
a.R擋掛P擋:當駕駛員在平路或坡道停車并意圖掛P擋時,駕駛員推動換擋手柄,經變速器外側的換擋機構帶動換擋桿旋轉,使得扭轉彈簧驅動凸輪旋轉,迫使凸輪與棘爪在P擋位置配合。此時,柱塞與擋位盤鎖止在P擋,棘爪與棘輪嚙合,變速器輸出軸通過外花鍵與棘輪內花鍵連接從而被鎖止。此操作可以控制汽車在安全行駛范圍內掛進P擋。
b.脫P擋:即掛P擋逆過程。當乘客需要切換P擋到R擋以驅動汽車行駛時,需要切換手柄,迫使扭轉彈簧帶動換擋桿回位。此過程中,棘爪脫離棘輪,從動軸旋轉自由度釋放。
3 駐車機構多體動力學分析
3.1 ADAMS多體動力學方程
采用第一類拉格朗日方程[5]:
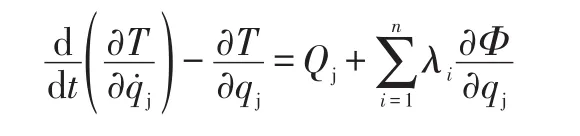
式中,T為系統廣義坐標表達的動能;qj為廣義坐標;Qj為在廣義坐標qj方向的廣義力;Φ為歐拉角;最后一項涉及約束方程和拉格朗日乘子,表達了在廣義坐標qj方向的約束反力,其中λi為拉格朗日乘子。
在進行動力學分析之前,ADAMS軟件會自動進行初始條件分析,以便在初始系統模型中使各物體的坐標與各種運動學約束之間達成協調,以保證系統滿足所有的約束條件。
3.2 建模
駐車機構作為控制汽車駐車安全的核心零部件,其運行過程與整車其它性能密切相關。采用多體動力學仿真軟件ADAMS建立詳細的駐車機構模型及簡化的整車模型。整車模型考慮整車滿載質量、軸距、重心高度、輪胎、半軸及差速器等。變速器模型考慮離合器、輸入軸、輸出軸、擋位齒輪、主減速器齒輪等旋轉件的轉動慣量及扭轉剛度。模型主要參數及數據見表1。
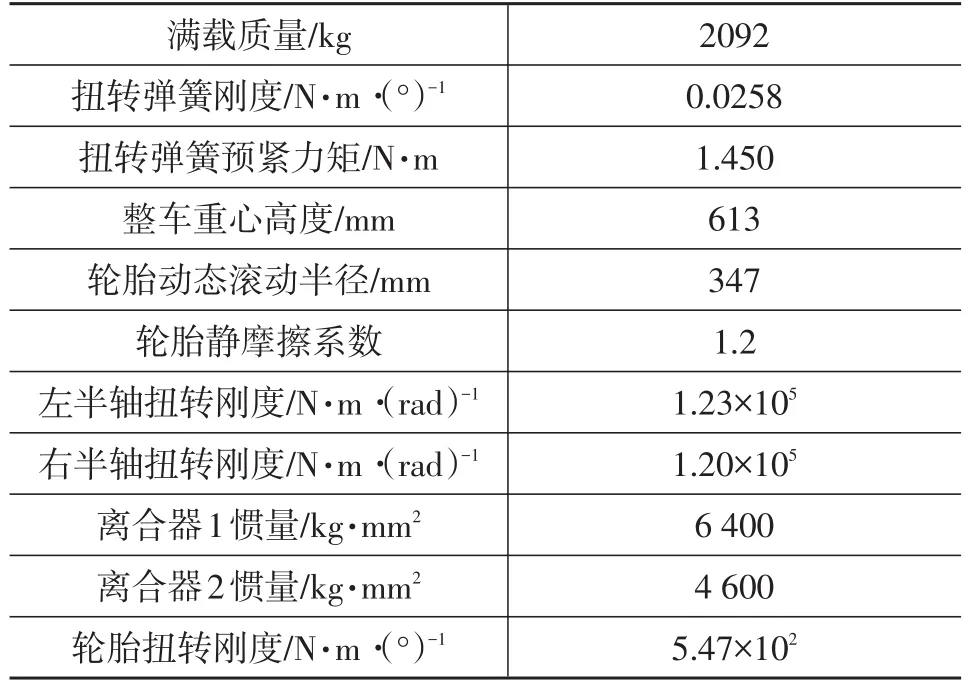
表1 駐車機構模型主要參數
3.3 仿真分析
3.3.1 平路駐車仿真
采用ADAMS軟件,首先模擬整車在水平路面駐車機構臨界掛入車速情況。圖3為模擬前進方向和后退方向臨界掛入車速。可知,前進方向和后退方向臨界掛入車速仿真值分別為3.3 km/h、3.2 km/h。
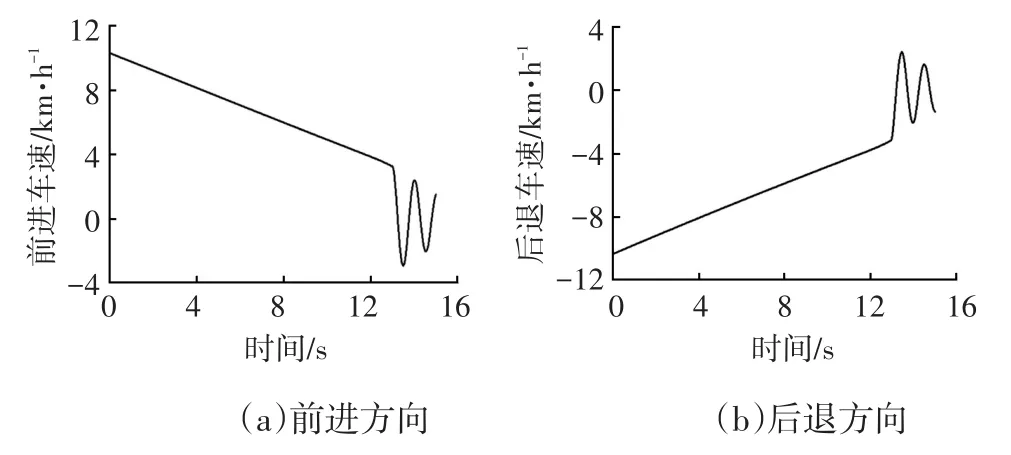
圖2 臨界掛入車速
3.3.2 坡道駐車仿真
對于該類型變速器的駐車機構,在坡道上停車掛入P擋后,如果駐車制動手柄與制動踏板的操作順序不當,會導致退出P擋的力較大。為了預測該拔出力矩,按照試驗規范要求,在30%坡道駐車時模擬操作不當時退出P擋所需的最大力矩,仿真結果如圖3所示。可知,車頭向下和向上P擋拔出力矩均為8.0 N·m。
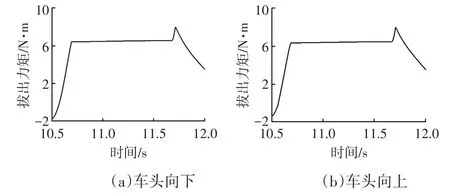
圖3 P擋拔出力矩
4 駐車機構試驗
按照試驗規范要求,駐車試驗需進行平路臨界車速駐車試驗及坡道駐車試驗。
4.1 平路駐車試驗
平路駐車試驗需執行企業標準,測試在某試驗場平直路面進行,如圖4所示。平路臨界掛入速度試驗操作過程如下:
a. 將車輛加速至10~15 km/h;
b.松開加速踏板并將換擋操縱桿撥至P擋位置;
c.車速緩慢下降,直至駐車機構將變速器鎖死。

圖4 平直路面駐車試驗
采用間接法測量車速,即通過采集差速器的轉速,根據輪胎半徑推算車速,圖5標記了臨界掛入速度讀取點。按照試驗規范,前進方向與后退方向分別測試10組數據,前進方向掛入速度分別為3.10 km/h、3.05 km/h、3.12 km/h、3.22 km/h、3.22 km/h、3.22 km/h、3.22 km/h、3.22 km/h、3.10 km/h、3.10 km/h,后退方向掛入速度分別為3.22 km/h、3.35 km/h、3.22 km/h、3.35 km/h、3.24 km/h、3.36 km/h、3.22 km/h、3.35 km/h、3.25 km/h、3.22 km/h。
4.2 30%坡道駐車試驗
P擋拔出力矩試驗在位于國內某試驗場的30%坡度上進行,步驟如下:
a.將車開到30%坡上,踩住制動踏板將車停穩在坡道上;
b.將換擋桿撥至P擋后松開制動踏板;
c.駐車機構將鎖住變速器從而使車停止在坡道上;
d.待車輛停穩后踩住制動踏板并將換擋桿撥離P擋位置。
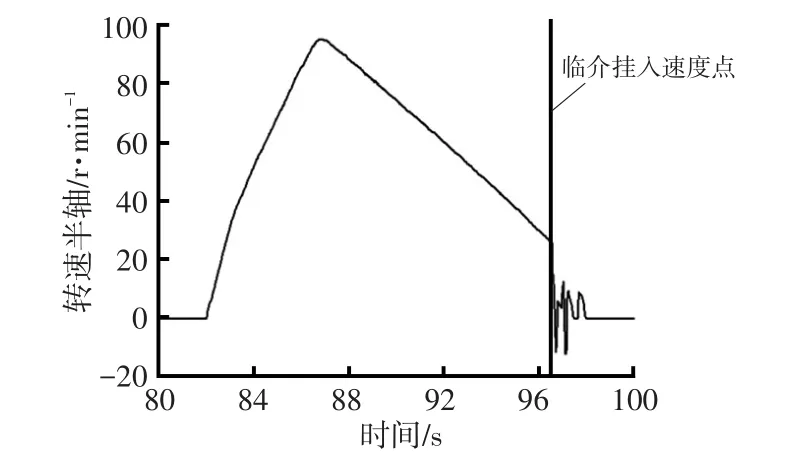
圖5 駐車機構臨界掛入速度點時半軸轉速
圖6為30%坡道試驗場地。試驗時,車頭向上與車頭向下分別進行150次測試。用于測試換擋扭矩所布置的傳感器應變片貼在變速器換擋搖臂上,傳感器使用前需要在實驗室進行敏感度標定。

圖6 30%坡道試驗場地
P擋拔出力矩通過變速器搖臂上應變片來測量,圖7為截取某個循環工況下車頭向下和車頭向上時換擋搖臂位置力矩測試結果。
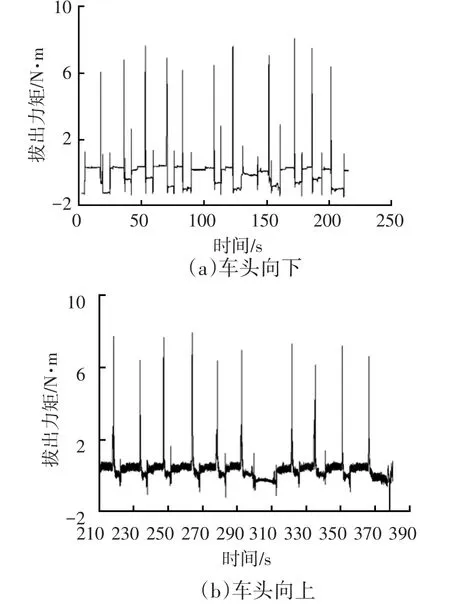
圖7 拔出力矩測試值
由圖7可知,試驗屬于惡劣工況試驗,故試驗過程中也對半軸扭矩進行檢測,以免對變速器、差速器等核心零件造成損壞。測試過程中,車頭向上方向的半軸動態扭矩值在2 309~3 298 N·m之間變化,車頭向下方向半軸動態扭矩值處于3 210~4 301 N·m之間,如圖8所示。
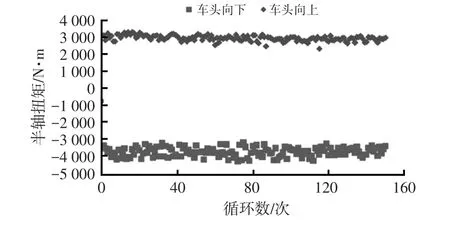
圖8 半軸動態扭矩
為滿足客戶滿意度,換算到換擋桿球頭上的拔出力矩平均值均應小于10 N·m。P擋到N擋拔出力矩測試值如圖9所示。可知,測試結果滿足設計要求。
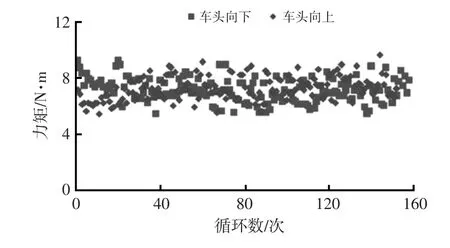
圖9 P擋到N擋拔出力矩測試值
5 仿真與試驗對比
為了驗證多體計算模型的可靠性,將CAE仿真結果與整車測試結果進行對比。
5.1 平路駐車與試驗對比
由于平路駐車試驗受駕駛員影響很小,故前后方向的臨界掛入車速值較一致,沒有很大的波動。測試結果與仿真結果誤差控制在8%以內,絕大部分次數控制在5%以內,說明仿真結果與試驗結果吻合度較高,對比結果見表2。
5.2 坡道駐車與試驗對比
坡道上拔出力矩試驗受駕駛員隨機操作的影響較大,比如踩制動踏板時機選擇不同會導致棘爪、棘輪配合間隙不同,駕駛員P擋切換到N擋時間也不相同,這些因素都會導致拔出力矩波動。因此,該組試驗結果離散性較大。故將仿真結果和測試數據平均值進行對比。車頭向下時,拔出力矩仿真值為8.0 N·m,測試均值為7.1 N·m,兩者誤差約為11.3%;車頭向上時,拔出力矩仿真值為8.0 N·m,測試均值為7.2 N·m,兩者誤差約為10%。測試值與仿真值均滿足客戶提出的“拔出力矩平均值小于10 N·m”的要求。

表2 平路駐車車速仿真與試驗對比
6 結束語
本文通過建立多體動力學模型,仿真分析了某款車輛在滿載工況下在平路上的駐車機構臨界掛入車速和30%坡度上P擋拔出力矩,并將仿真結果與整車試驗結果進行了對比。平路上臨界速度仿真結果與試驗結果相吻合,證明平路上仿真模型的合理性與實用性。30%坡度上仿真模型與試驗結果對比有較大的誤差,主要原因是測試受人為因素影響較大,需進一步改進人為因素導致的數據離散性問題。仿真結果滿足客戶設定的拔出力矩要求,模型可以用于換擋機構零件設計分析。
[1]陳華,陳辛波,傅靈玲,等.自動變速器駐車機構性能分析與研究[J].拖拉機與農用運輸車,2014,41(4):24-26.
[2]劉詩,曾俊.自動變速器駐車機構的性能研究及仿真優化[C]//2015中國汽車工程學會年會論文集.北京:機械工業出版社,2015:391-394.
[3]張玉文,李慧強.基于RecurDyn的自動變速器駐車機構P-R換擋性能的設計校核[J].輕型汽車技術,2012(10):34-37.
[4]王明成.CA7CH350D濕式雙離合器式自動變速器關鍵部件設計與集成[J].汽車技術,2015(3):5-8+35.
[5]陳立平,張云清,任衛群,等.機械系統動力學分析及AD?AMS應用教程[M].北京:清華大學出版社,2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
