多旋翼植保無人機噴霧均勻性試驗
2018-02-13 12:14:44劉道奇余永昌張開飛董慧鋒趙彬彬秦超彬邢金龍
江蘇農(nóng)業(yè)科學(xué) 2018年24期
關(guān)鍵詞:作業(yè)
劉道奇, 余永昌, 張開飛, 董慧鋒, 趙彬彬, 秦超彬, 邢金龍, 李 赫
(1.河南省農(nóng)業(yè)科學(xué)院長垣分院,河南長垣 453400; 2.河南農(nóng)業(yè)大學(xué),河南鄭州 450002)
近年來,我國農(nóng)用植保無人機發(fā)展迅速,據(jù)農(nóng)業(yè)部相關(guān)部門統(tǒng)計,截至2016年5月,全國在用的農(nóng)用無人機共有178種,全國農(nóng)業(yè)航空技術(shù)95%以上用于航空植保作業(yè)[1]。其中,多旋翼植保無人機受到越來越廣泛的關(guān)注,主要是由于其制造原材料成本的降低,作業(yè)極為高效,并且對人體造成的污染較少,采用低量或超低量噴霧可以降低農(nóng)藥使用量,提高農(nóng)藥利用率,同時還能減少作業(yè)過程對環(huán)境的污染[2-9]。多旋翼植保無人機在農(nóng)業(yè)植保的應(yīng)用方面愈加頻繁,目前國內(nèi)已經(jīng)有許多中小型企業(yè)進行多旋翼植保無人機的研發(fā)與生產(chǎn)。多旋翼植保無人機在我國發(fā)展年限較短,多數(shù)由企業(yè)拼裝而成,整機及零部件缺乏相應(yīng)的行業(yè)制造規(guī)范,作業(yè)可靠性不高,飛行控制系統(tǒng)依然具有一定的缺陷,在作業(yè)過程中易發(fā)生各種事故,并且缺乏熟練的飛手進行植保作業(yè),這些問題都造成了多旋翼植保無人機的作業(yè)效果一直無法得到廣大農(nóng)民的認(rèn)可,其作業(yè)參數(shù)對作業(yè)效果的影響一直缺乏相應(yīng)的理論和數(shù)據(jù)支持。本研究在現(xiàn)有條件下,對3W16-10型8軸16旋翼植保無人機進行進一步試驗測試,主要探究飛行高度、飛行速度、噴霧壓力對噴霧均勻性的影響,以期為多旋翼植保無人機噴霧作業(yè)參數(shù)的確定和作業(yè)環(huán)境的選擇提供理論依據(jù),減少多旋翼植保無人機施藥過程中的農(nóng)藥損失,提高農(nóng)藥利用率。
1 材料與方法
1.1 材料與設(shè)備
試驗采用的材料與設(shè)備由3W16-10型多旋翼植保無人機及其配套噴霧系統(tǒng)、霧滴收集裝置、環(huán)境參數(shù)檢測裝置、數(shù)據(jù)采集及配套分析系統(tǒng)組成(表1)。多旋翼植保無人機及其配套噴霧系統(tǒng)作業(yè)機械為3W16-10型多旋翼植保無人機(圖1-a),采用8軸16旋翼設(shè)計結(jié)構(gòu),機身及螺旋槳材料以碳纖維為主,飛行控制采用大疆創(chuàng)新科技有限公司生產(chǎn)的A2飛行控制系統(tǒng),支持失控保護和低電壓保護,具有智能控制及自穩(wěn)功能等;噴霧系統(tǒng)包括氣泵、控制器、輸液管及噴頭等裝置。霧滴收集裝置(圖1-b)尺寸為510 cm×510 cm×210 cm,裝置主體由不銹鋼方鋼(鄭州海綿電動門商行)搭建而成。在其2個側(cè)面(每個面18個點)和1個底面(27個點)用鐵絲共分割出63個點,用于固定霧滴收集裝置,霧滴收集裝置選用定性濾紙(遼寧省撫順市民政濾紙廠)和培養(yǎng)皿(江蘇省揚州市光華醫(yī)療器械有有限公司)。將濾紙用燕尾夾固定在各個點上,設(shè)置3組重復(fù),用以消除單次試驗可能引起的誤差。

表1 3W16-10型多旋翼植保無人機主要技術(shù)參數(shù)

為保證試驗結(jié)果的可靠性,在試驗過程中對環(huán)境及試驗參數(shù)等進行監(jiān)測,所用儀器如圖2所示,通過溫濕度儀(廣東省深圳市華盛昌機械科技實業(yè)股份有限公司)、風(fēng)速儀(浙江省杭州綠博儀器有限公司)監(jiān)測環(huán)境溫度、風(fēng)速、濕度等。通過無人機自帶的圖傳設(shè)備實時記錄無人機的飛行速度、高度。數(shù)據(jù)采集及配套分析裝置包括數(shù)據(jù)采集卡、密封袋、移液槍、紫外可見分光光度計(圖2-c)等,配制質(zhì)量濃度為2 g/L的胭脂紅溶液(天津市科密歐化學(xué)試劑有限公司)作為噴霧液。測試后將霧滴收集器的胭脂紅溶液用去離子水洗脫后,經(jīng)EXPEC分光分析儀[聚光科技(杭州)股份有限公司]檢測其吸光度。

1.2 試驗方法
2017年4—5月在河南農(nóng)業(yè)大學(xué)第三生活區(qū)實驗樓前空白場地進行試驗,測試按照無人植保機械施藥空間質(zhì)量平衡測試方法實施[1]。試驗樁裝置如圖1-b所示,定性濾紙用夾子固定在收集裝置2個側(cè)面的36個點上,分為3組;在底面上用夾子將定性濾紙固定在27個點上,分3組。同時用培養(yǎng)皿在地面上設(shè)置3組,27個點作為參照。本試驗采用響應(yīng)面分析的試驗方法設(shè)計試驗,選取高度、速度、噴霧壓力3個自變量設(shè)置試驗范圍中低值和中高值為1.2~2.0 m、1.2~4.0 m/s、0.3~0.5 MPa,試驗分析目標(biāo)為沉積濃度變異系數(shù)。對環(huán)境溫度、風(fēng)速進行監(jiān)測,達到試驗所需水平時進行試驗,用2 g/L胭脂紅溶液代替藥液噴霧,啟動植保無人機使其進入正常飛行運行狀態(tài),每組試驗重復(fù)3次。每組試驗結(jié)束后待霧滴采集卡自然晾干,編號并裝入收集盒。
1.3 數(shù)據(jù)處理
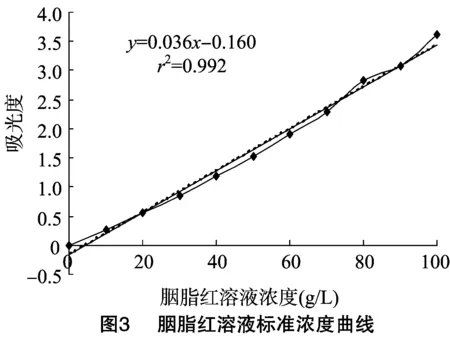
1.3.1 沉積濃度吸光度標(biāo)定 先使用分析天平稱取0.5 g分析純級胭脂紅粉末,放入燒杯中用玻璃棒攪拌,待粉末狀物質(zhì)完全消失,加入到500 mL的容量瓶中,配制2 g/L胭脂紅原液,用移液槍分別抽取100、200、300、400、500、600、700、800、900、1 000 μL的胭脂紅原液加入10 mL的容量瓶中,配制10、20、30、40、50、60、70、80、90、100 mg/L 10組胭脂紅溶液,選取超純水作為參照組,在其最大波長λ=508 nm處測得其最大吸光度,每份重復(fù)測試3次并取其平均值,得到胭脂紅溶液濃度吸光度曲線(圖3)。通過線性回歸擬合,其決定系數(shù)r2=0.992。由于沉積量的測量須要測試稀釋液濃度,胭脂紅溶液濃度與吸光度的關(guān)系式:
C=0.036 1D-0.160 4。
式中:D為吸光度;C為胭脂紅溶液濃度,mg/L。
1.3.2 霧滴沉積濃度的測定及統(tǒng)計方法
1.3.2.1 胭脂紅回收率的檢測 用移液槍分別吸取10種濃度的胭脂紅溶液200 μL滴至培養(yǎng)皿中,待其自然風(fēng)干后吸取200 μL超純水反復(fù)洗滌培養(yǎng)皿,并再次測量洗滌液吸光度,經(jīng)試驗檢測,胭脂紅溶液回收率可達93.5%,且不受濃度高低影響。
1.3.2.2 單點霧滴收集皿沉積濃度的測量 單點霧滴收集皿沉積濃度的測量方法:噴霧試驗結(jié)束后,待其自然風(fēng)干,加蓋,帶回實驗室用200 μL超純水反復(fù)洗滌,選取超純水作為參照組測量其吸光度。沉積濃度公式為
式中:βdep是霧滴采集卡上單位面積霧滴沉積量,mg/cm2;βsmpl是可見紫外分光光度計示數(shù);βblk為空白采集卡讀數(shù);Fcal為可見紫外分光光度計示數(shù)與示蹤劑濃度的關(guān)系系數(shù),μg/L;Vdil為加入洗滌液的體積,mL;βspray為藥液中示蹤劑濃度;Acol為收集卡面積。
水利施工現(xiàn)場由于具備顯著的復(fù)雜性,因此亟待對此予以綜合性的施工管理。通過推行現(xiàn)場施工監(jiān)管的舉措,應(yīng)當(dāng)能在根源上消除某些潛在隱患或者其他施工風(fēng)險,確保水利建筑物應(yīng)有的安全性并且杜絕某些額外的水利建設(shè)成本耗費。由此可見,施工現(xiàn)場管理舉措應(yīng)當(dāng)能夠滲透在全過程的水利施工中,其中包含了如下的施工現(xiàn)場管理關(guān)鍵技術(shù):
采用變異系數(shù)CV作為衡量其噴霧均勻性的標(biāo)準(zhǔn),其公式為

2 試驗結(jié)果與分析
2.1 單因素試驗結(jié)果
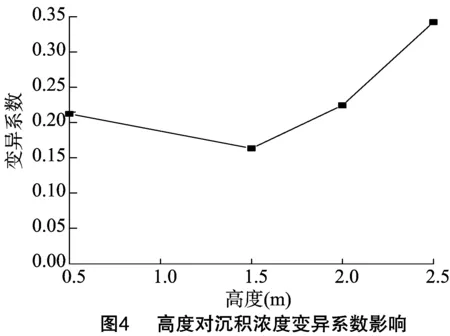
2.1.1 植保無人機高度對霧滴沉積均勻性的影響 從圖4可以看出,當(dāng)高度≤1.5 m時,隨著高度的增大,植保無人機噴霧沉積濃度的變異系數(shù)減小;當(dāng)高度>1.5 m時,多旋翼植保無人機噴霧沉積濃度的變異系數(shù)隨著高度的增大而增大。可見,在噴霧作業(yè)過程中,在一定范圍內(nèi)飛行高度與噴霧均勻性成正比,但是超過一定高度后噴霧高度對噴霧沉積均勻性又會產(chǎn)生負(fù)面影響,因此沉積均勻性最好的試驗高度為 1.5 m。
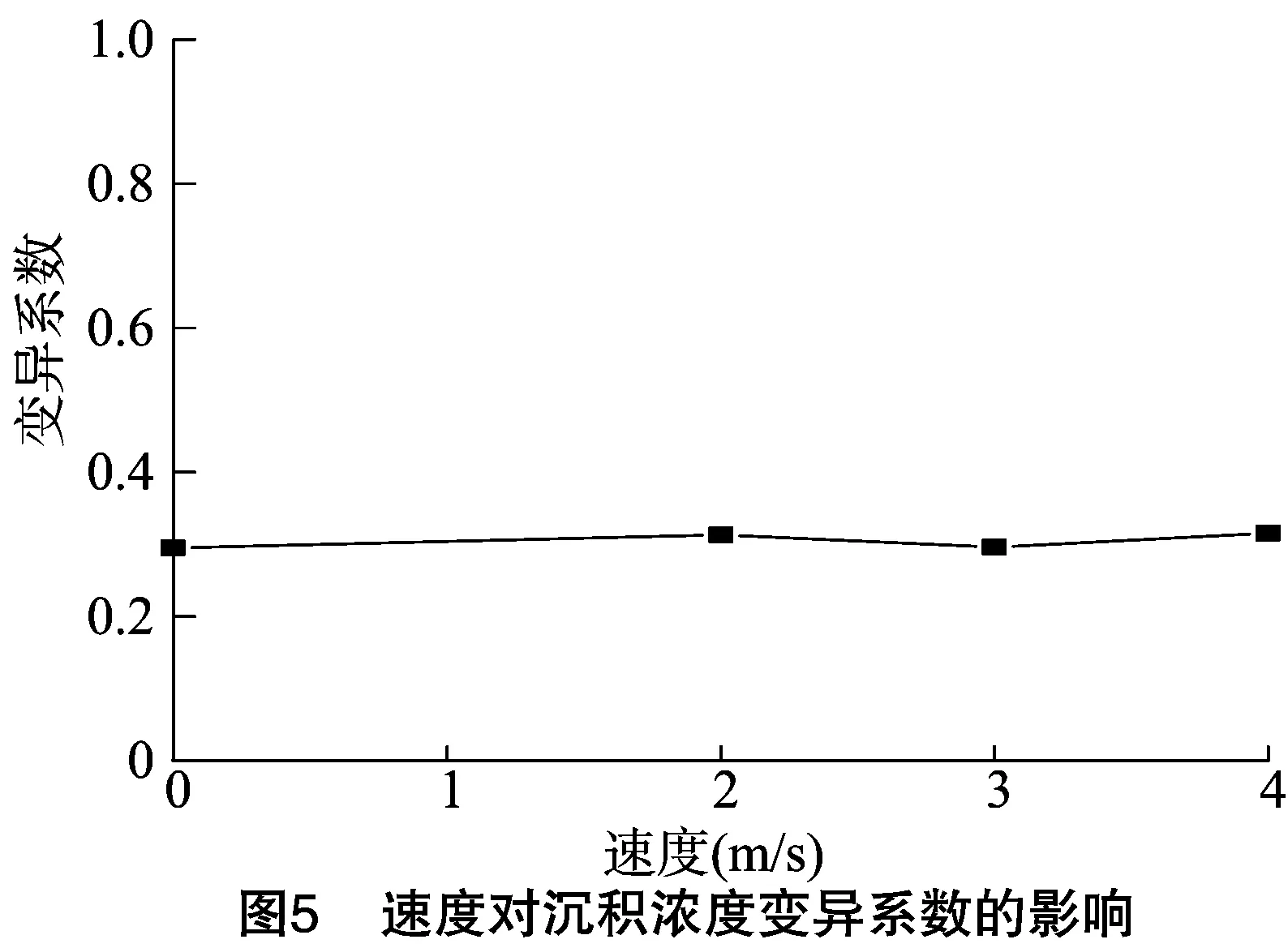
2.1.2 植保無人機相對速度對霧滴沉積均勻性的影響 從圖5可以看出,3W16-10型多旋翼植保無人機霧滴沉積均勻性變異系數(shù)隨速度變化并無明顯改變,說明飛行速度對其霧滴沉積均勻性影響不明顯。
2.1.3 植保無人機噴霧壓力對霧滴沉積均勻性的影響 從圖6可以看出,3W16-10型多旋翼植保無人機霧滴沉積濃度變異系數(shù)隨噴霧壓力的增加小范圍減少,霧滴均勻性變好。
2.1.4 響應(yīng)面試驗結(jié)果及方差分析 根據(jù)單因素試驗結(jié)果,選取處理高度(A)、速度(B)、壓力(C)3個重要因素,并用Design Expert 7.0軟件設(shè)計3因素3水平試驗。以沉積濃度變異系數(shù)為目標(biāo)函數(shù),響應(yīng)面試驗結(jié)果見表2。
2.2 試驗分析
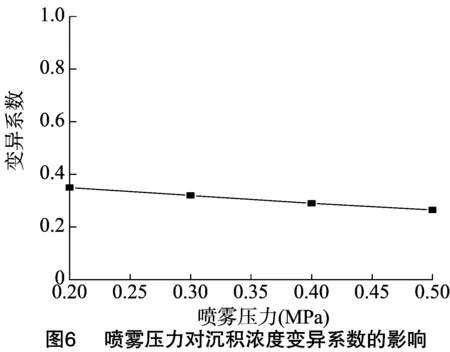
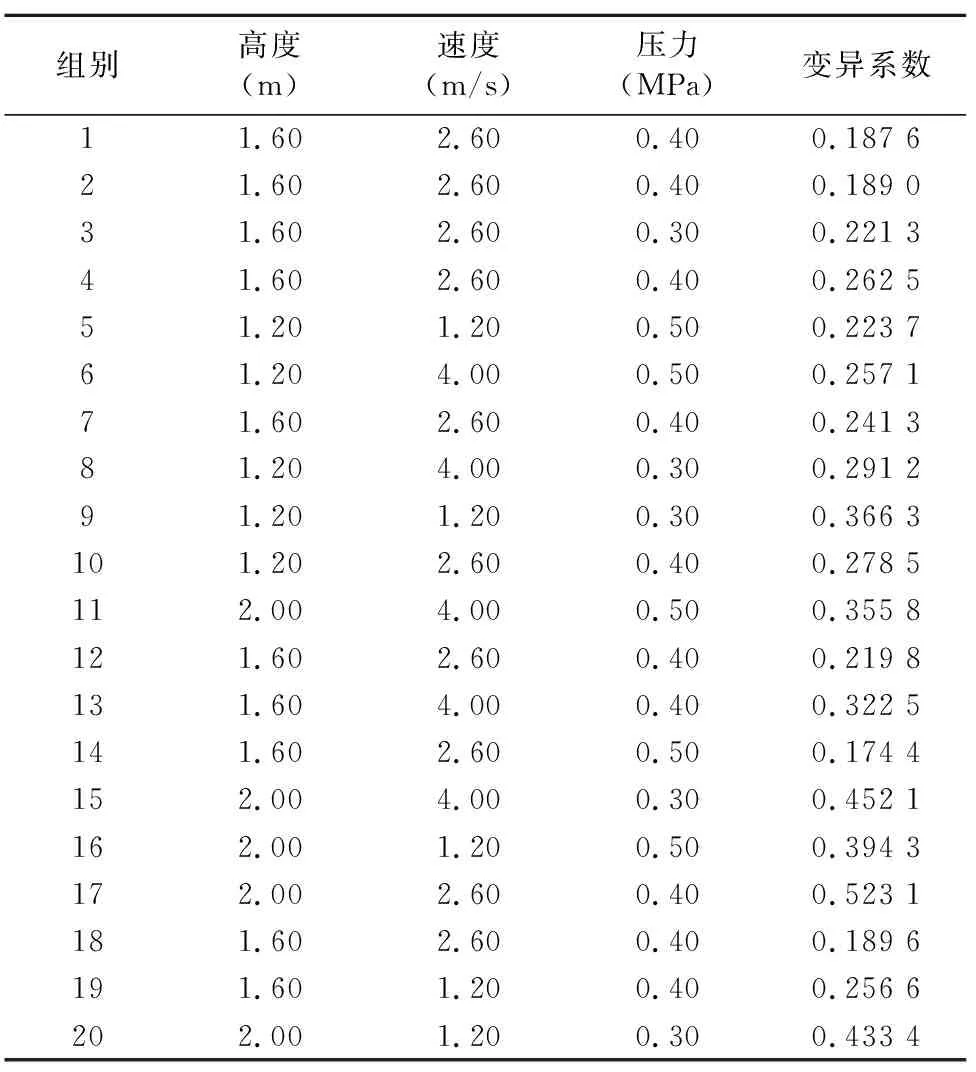
表2 響應(yīng)面試驗及響應(yīng)值
從表3可知,試驗數(shù)據(jù)所得的F值為9.230,P值為0.000 9,表明該模型顯著。基于回歸模型的因素顯著性分析,在顯著水平0.01條件下,模型中的一次項A、二次項A2表現(xiàn)顯著,其余項表現(xiàn)為不顯著。在顯著水平0.05條件下,模型中的一次項A、C,二次項、A2、B2顯著,其余項表現(xiàn)為不顯著。整個模型的失擬項P=0.127 9>0.05,表明失擬項不顯著,即該模型是穩(wěn)定的,能較好地預(yù)測高度、速度、壓力3個因素對植保無人機噴霧均勻性的影響,因此可采用此模型對高度的變化量進行分析和預(yù)測。由模型中一次項的回歸系數(shù)絕對值可得對沉積濃度變異系數(shù)高低影響的順序為:飛行高度>飛行速度。以飛行高度、飛行速度的編碼值為自變量,以沉積濃度變異系數(shù)為y值的二元二次回歸方程為
由此可得最佳的預(yù)作業(yè)條件為:飛行高度1.39 m,飛行速度2.38 m/s,噴霧壓力0.5 MPa,此條件下的沉積濃度變異系數(shù)為0.172。
2.3 試驗因素交互影響分析
為了得到兩兩因素之間同時作用對沉積均勻性變異系數(shù)的影響,用Design Expert 8.0軟件作出相應(yīng)的響應(yīng)曲面3D圖和相應(yīng)的等高線圖(圖7、圖8、圖9),并對兩兩因素間的交互作用進行分析。
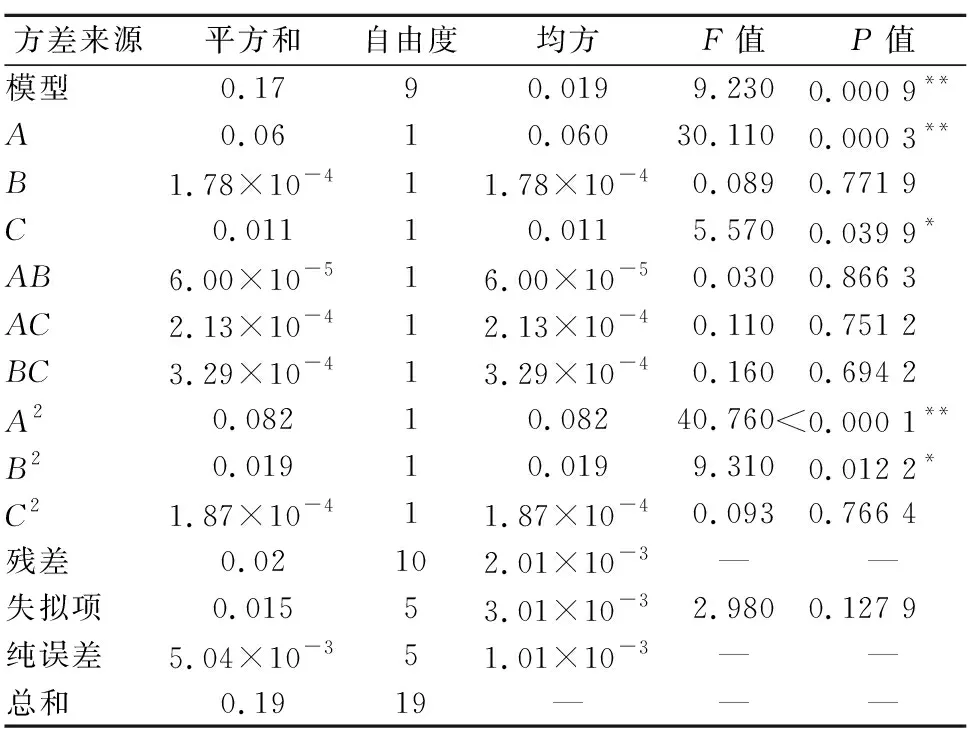
表3 響應(yīng)曲面方差分析
圖7是噴霧壓力為0.4 MPa時,3W16-10型多旋翼植保無人機飛行速度和飛行高度對霧滴沉積均勻性變異系數(shù)的影響曲面圖。當(dāng)飛行速度一定時,隨著飛行高度的增加,霧滴沉積均勻性變異系數(shù)先小范圍減小后快速增加,這是由于在飛行高度過低時,霧滴來不及霧化就直接噴灑到采集卡上,當(dāng)高度過高時,漂移量增加,霧滴受下旋風(fēng)渦流影響會出現(xiàn)局部集中的情況;當(dāng)飛行高度一定時,霧滴沉積均勻性變異系數(shù)隨速度變化不太明顯,這是由于速度對霧滴沉積均勻性影響效果不顯著;整體來看,飛行速度和飛行高度互作對3W16-10型多旋翼植保無人機噴霧沉積的均勻性影響不顯著。

圖8是飛行速度為2.6 m/s時,3W16-10型多旋翼植保無人機噴霧壓力和飛行高度對霧滴沉積均勻性變異系數(shù)的影響曲面圖。當(dāng)噴霧壓力一定時,隨著飛行高度的增加,霧滴沉積均勻性變異系數(shù)先小范圍降低后快速增加,對霧滴沉積均勻性變異系數(shù)影響極顯著;當(dāng)飛行高度一定時,霧滴沉積均勻性變異系數(shù)隨噴霧壓力增加小幅度減少,這是由于當(dāng)噴霧壓力增加時,霧化效果較好,有利于霧滴更加均勻地到達靶標(biāo)采集卡上;整體來看,噴霧壓力和飛行高度互作對3W16-10型多旋翼植保無人機噴霧沉積的均勻性影響不顯著,在高度為1.39 m、噴霧壓力為0.5 MPa時,沉積濃度變異系數(shù)最低,均勻性最好。
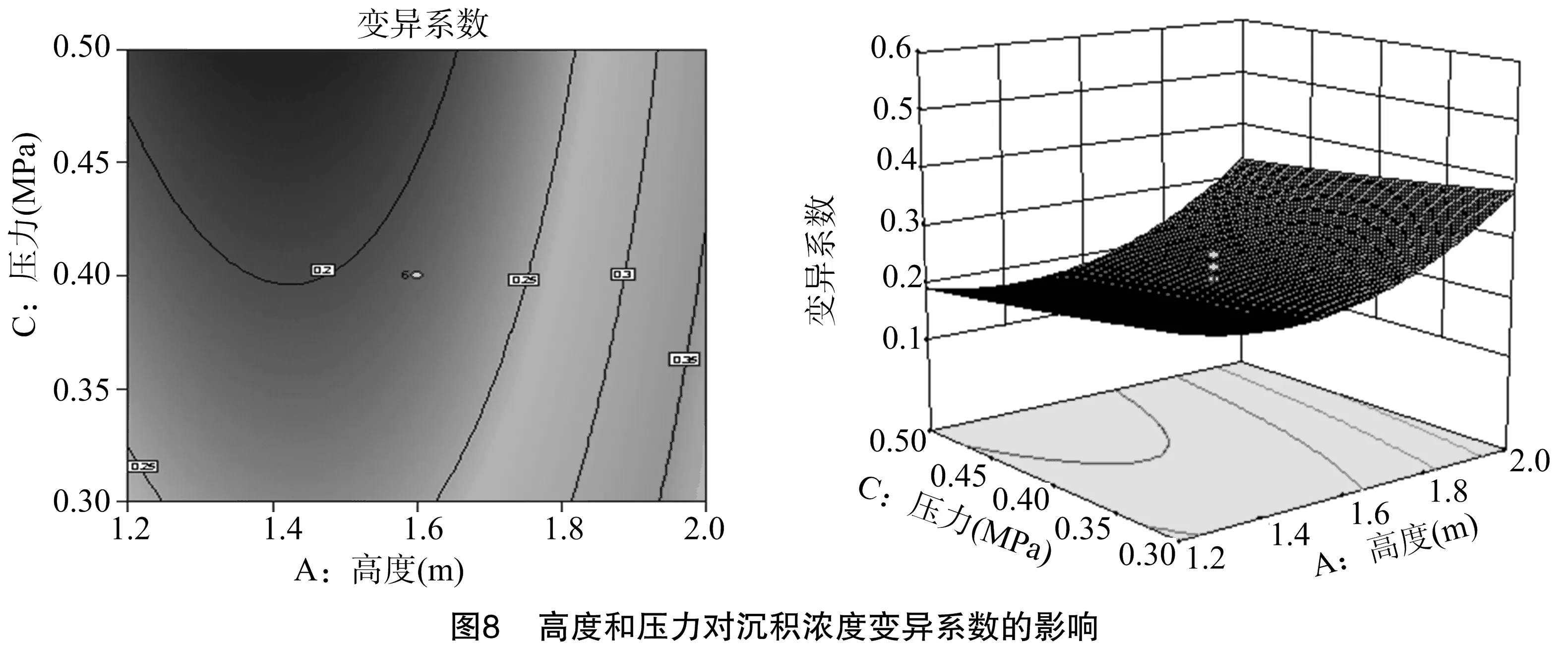
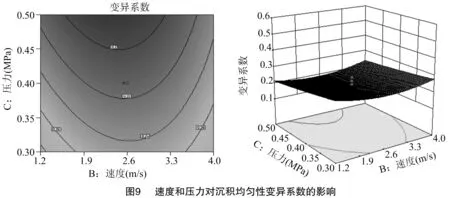
圖9為飛行高度為1.6 m時,3W16-10型多旋翼植保無人機噴霧壓力和飛行速度對霧滴沉積均勻性變異系數(shù)的影響曲面圖。當(dāng)飛行速度一定時,隨著噴霧壓力的增加,霧滴沉積均勻性變異系數(shù)小幅增加,對霧滴沉積均勻性變異系數(shù)影響顯著;當(dāng)噴霧壓力一定時,霧滴沉積均勻性變異系數(shù)隨飛行速度增加變化較小,響應(yīng)面起伏較小,顏色波動小,說明噴霧壓力和飛行速度互作對霧滴沉積均勻性的交互作用不明顯。
3 結(jié)論
根據(jù)以上分析,通過Design Expert 8.0軟件模擬所得3W16-10型多旋翼植保無人機最佳作業(yè)參數(shù)為:飛行高度1.39 m,飛行速度2.38 m/s,噴霧壓力0.5 MPa。通過修正,將飛行高度設(shè)置為1.4 m, 飛行速度設(shè)置為2.5 m/s,噴霧壓力設(shè)置為0.5 MP,在此條件下進行3W16-10型多旋翼植保無人機噴霧均勻性測定試驗。在修正條件下所得霧滴沉積均勻性變異系數(shù)為0.184,與預(yù)測值間相對誤差為8%。結(jié)果表明,運用響應(yīng)曲面法優(yōu)化3W16-10型多旋翼植保無人機作業(yè)參數(shù)是可行的。
通過單因素試驗和響應(yīng)曲面法優(yōu)化3W16-10型多旋翼植保無人機噴霧均勻性試驗得到的最佳作業(yè)參數(shù)為:飛行高度1.39 m,飛行速度2.38 m/s,噴霧壓力0.5 MPa,此時沉積均勻性變異系數(shù)為0.172,相對誤差為8%。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08