
液壓伺服系統設計與分析
2018-02-23 09:18:22馬聞宇王鳳琴劉子英張喜榜
中國鋼鐵業 2018年12期
馬聞宇 王鳳琴 趙 林 劉子英 郭 薇 張喜榜
液壓伺服系統可使系統的輸出量(如位移、速度和力等)自動、快速、準確地跟隨輸入量的變化而變化,同時,大幅度放大輸出功率。液壓伺服系統以其響應速度快、控制功率大和負載剛度大等獨特的優點在工業控制中得到了廣泛應用[1-2]。液壓伺服系統通過使用電液伺服閥,可將小功率的電信號轉換為大功率的液壓動力,從而實現了一些重型機械設備的伺服控制。液壓傳動中具有隨動作用的液壓自動控制系統,在這種系統中,大功率的液壓元件(包括液壓伺服閥和液壓執行元件)跟隨小功率的指令信號元件動作[2-3]。執行元件所控制的通常是位置和速度等機械量。指令信號元件又稱參考信號元件,它發出代表位置、速度或其他量的指令信號。大功率與小功率之比可以達幾百萬倍以上。液壓伺服系統是反饋控制系統,反饋回來代表實際狀態的信號與指令信號比較,得到誤差信號,若誤差不為零,則進行調節。液壓伺服系統通常應包括實際狀態的測量反饋元件、小功率指令信號的傳遞元件和大功率液壓執行元件、期望狀態和反饋狀態的比較元件以及差值信號的放大元件。液壓伺服系統分為機械液壓伺服系統、電液伺服系統和氣液伺服系統[3-4]。它們的指令信號分別為機械信號、電信號和氣壓信號。電液伺服系統因電氣控制靈活而得到廣泛的應用;氣液伺服系統用于防爆的環境或容易獲得氣壓信號的場合;液壓伺服系統應具有工作穩定、對指令信號反應快、穩態誤差小以及對干擾不敏感等必要的性能。液壓伺服系統是自動控制系統中應用最廣泛的一種[5-6]。在精密加工的定位系統中,液壓伺服系統能保證小于0.1μm的加工誤差。世界上許多巨大天文望遠鏡的動作都是用星光作為伺服系統的指令信號,通過液壓伺服系統和執行元件進行跟蹤的。本文主要將某電機伺服系統改成液壓伺服系統,介紹了設計過程和部分元器件的選型。
1.設計要求
我國最近幾年在電機伺服系統取得了突飛猛進的成果,但同時也遇到了許多的難題,如某動力系統采用西門子交流伺服電機驅動,該系統在實際使用中就暴露了電磁方面的嚴重問題,該系統在運行過程中對總靜壓信號和天平信號造成了比較強的電磁干擾,導致附近流場精確控制極其困難,測量信號的可靠性顯著降低。為此,本文的研究方向就是將現有的交流電機驅動裝置改造為液壓伺服裝置(見圖1)。
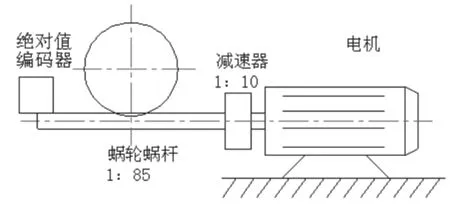
圖1 交流電機驅動裝置
交流電機的工作參數如下:
型號:1FT6105-88C71-1AHO-Z;
功率:16kW;
額定轉速:1500 r/min;
最大輸出轉矩:65 N·m;
額定轉矩:55 N·m;
負載轉動慣量:0.01 kg·m2。
2.回路設計

圖2 液壓伺服系統回路
由圖2可見,液壓伺服系統回路是一個定量泵-變量馬達式容積調速回路,主要由液壓泵、溢流閥、節流閥、電液伺服閥和液壓馬達等輔助設備組成。系統正常工作時,溫度計1可以顯示油箱內液壓油的溫度。粗過濾器2可以將輸入液壓泵的液壓油進行初步過濾,從而有效保護液壓泵。空氣過濾器3可以保證油箱與大氣相通,從而保證油箱內的壓力與大氣壓保持恒定,同時可以防止空氣中的雜質進入。液位計4用于顯示油箱內液壓油的位置,進而確定油量是否充足。液壓泵5主要為系統提供動力,將油箱里的液壓油輸入到系統中。精過濾器6對液壓油進一步進行過濾,從而使液壓油內的雜質得到有效地濾除,避免油內的雜質對系統的元器件的損害。溢流閥7起保護作用,保證系統的最高壓力不至于過高,當液壓泵的輸出壓力過高時,液壓油可以通過溢流閥流回油箱。液壓指示器8可及時顯示液壓泵的輸出壓力,對系統的油壓進行有效地監測。冷卻器9可以對回到油箱的液壓油進行冷卻保證油溫不至于過高。電液伺服閥10通過改變液壓油的流動形式使液壓馬達處于不同的工作狀態。流量計11可有效監測進入液壓馬達的油量。2個液控單向閥12,13構成了一個鎖緊裝置,當電液伺服閥處于中位時,液壓油則通過伺服閥直接回到油箱。這時,液控單向閥12,13不允許液壓油逆向通過,使得液壓馬達保持靜止,并且達到很高的精度。液壓馬達14是主要的執行元件,直接為動力裝置提供動力。液壓指示器15對液壓馬達的輸入壓力進行有效監測。
當系統工作時,液壓油經過粗過濾器2、液壓泵5、精過濾器6、電液伺服閥10的左側、流量計11和液控單向閥12到達液壓馬達14,然后通過液控單向閥13電液伺服閥10的左側和冷卻器9回到油箱。當不需要液壓馬達14工作時,可以選擇電液伺服閥10的中位,從而使液壓油直接回到油箱。此系統具有體積小、重量輕、慣性小、可靠性好、輸出功率大、快速性好、剛度大(輸出位移受外負載影響小)、定位準確以及自動化程度高等優點。同時,伺服元件的加工精度高,價格昂貴,特別是液壓伺服系統對油液的污染比較敏感。因此,可靠性受到影響;在小功率系統中,液壓伺服系統不如電氣控制靈活,且存在加工難度高、抗污染能力差、不易維護和成本較高等缺點。隨著科學技術的發展,液壓伺服系統的缺點將被不斷克服。
3.液壓元件的選型
3.1 馬達的選型
馬達的主要類型有齒輪馬達、葉片馬達、擺線馬達、軸向柱塞馬達、徑向柱塞馬達和內曲線柱塞馬達等。本次設計選擇了齒輪馬達,其應用范圍包括鉆床和通風設備等,具有結構簡單、制造容易和噪聲限制不嚴等特點。具體的型號則根據原電機裝置的相關參數進行選擇,要使其工作能力高于或至少等于原電機裝置。
3.2 液壓泵的選型
液壓泵的主要類型有齒輪泵、葉片泵和柱塞泵等。本次設計選擇了齒輪泵,其應用范圍包括機床、通風設備、工程機械、航空和船舶等,具有體積較小、結構簡單、對油的清潔度要求不高和價格較便宜等特點。液壓泵的具體型號根據泵的最高供油壓力和泵的最大供油量來選定的。
3.3 閥類元件的選型
各種閥類元件的規格型號按液壓系統原理圖和系統工況圖中提供的情況從產品樣本中選取。各種閥的額定壓力和額定流量一般應該與其工作壓力和最大通過流量相近,必要時可允許其最大通過流量超過額定流量20%。注意溢流閥應該使其能夠通過液壓泵的全部流量。
3.4 輔助元件的選型
輔助元件的選型主要是過濾器的選型、冷卻器的選型和其他輔助元件的選型(見表1)。
4.仿真模型的建立與應用
該液壓伺服系統的參數如下:
開環增益:10451/s;
伺服閥的固有頻率:1700 rad/s;
伺服閥的阻尼比:0.7;
液壓馬達-負載的固有頻率:348 rad/s;
液壓馬達-負載的阻尼比:0.7。

表1 各液壓元件的型號
根據系統方框圖在matlab中建立仿真模型(見圖3)。
所建立的液壓伺服系統開環傳遞函數為:
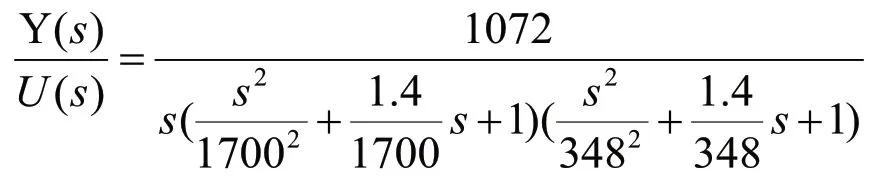
式中:Y(s)為該函數輸出量;U(s)為函數輸入量;s為函數變量。
系統穩定性是系統正常工作的必要條件,所以對系統進行穩定性分析非常必要。由于系統參數在工作過程中會經常發生變化,所以用系統開環伯德圖進行系統的穩定性分析非常方便(見圖4)。
由圖4可見,系統的幅值裕量為 -9.07dB,對應的相位穿越頻率為303rad/s,相位裕量為-42°,因此系統無論從幅值裕量還是從相位裕量來說都是不穩定的,需要對其進行校正。
為增加系統穩定性,通常需要進行系統校正,所謂校正就是給系統增加一些具有某種典型環節特性的網絡、運算部件、測量裝置或者適當調節調整參數等。通過適當的校正環節可以有效改善整個系統的控制性能。針對液壓伺服系統,穩定系統的幅值裕量最好應大于1,相位裕量最好應大于30°。
首先,可以采用超前校正,即在前向通路的直流部分串聯一個超前校正網絡。網絡在正弦信號作用下的穩態輸出電壓,在相位上超前于輸入,所以成為超前網絡。超前校正環節可以使系統的相位超前(見圖5)。
通過計算,對超前校正網絡設置參數為:
R1C=T=1/60
α=1/10
各式中:T為周期系數;α為校正網絡參數。
超前校正網絡的傳遞函數G(s)為:
G(s)=(αTs+α)/αTs+1
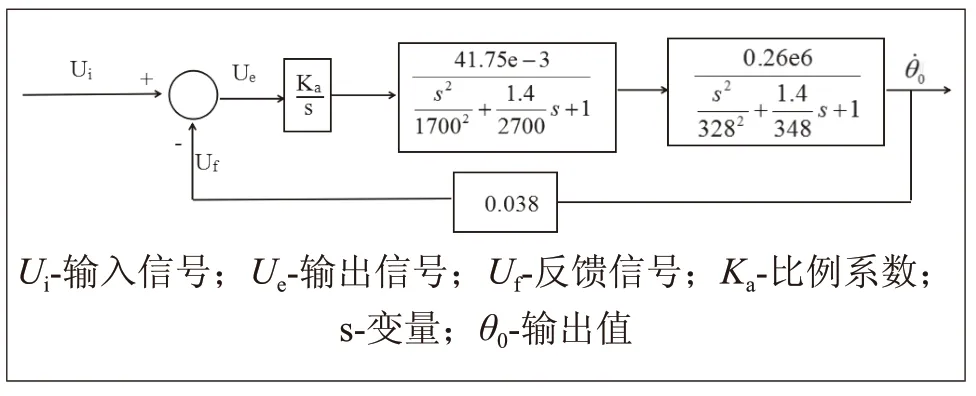
圖3 建立的液壓伺服系統方框圖

圖4 建立的液壓伺服系統開環伯德圖
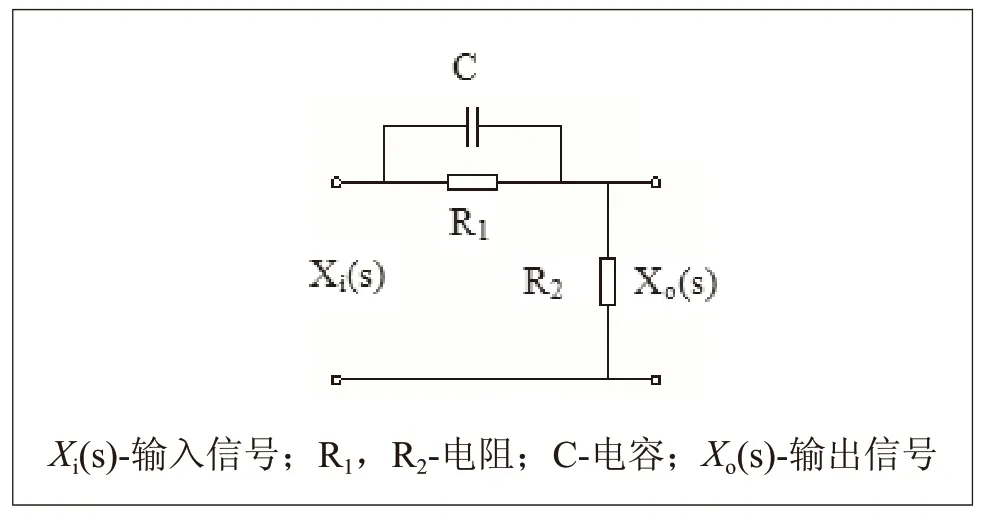
圖5 超前校正網絡
式中:s為變量。
用matlab分析,可得到增加超前校正網絡后的液壓伺服系統開環伯德圖(見圖6)。
由圖6可見,增加超前校正網絡后,液壓伺服系統的幅值裕量變為3.36,相位裕量變為39°,滿足穩定性要求,故本系統用超前校正可以達到要求。
從簡便易操作的角度考慮,可將開環增益減小為原來的1/10,用matlab分析得到新的液壓伺服系統伯德圖(見圖7)。
由圖7可見,減小開環增益后,液壓伺服系統的幅值裕量變為 4.39,相位裕量變為32°,滿足穩定性要求。同時,適當地提高馬達排量可以得到新的系統伯德圖(見圖8)。
由圖8可見,提高馬達排量和降低增益后,液壓伺服系統的幅值裕量變為1.6,相位裕量變為35°,滿足穩定性要求。
綜上所述,通過增加超前校正網絡、減小開環增益和增加馬達排量等均可使液壓伺服系統滿足穩定性要求。
5.結語
本文主要介紹了此次液壓伺服系統設計的具體要求以及原系統的相關參數等,并根據相關要求設計了1 套滿足要求的液壓伺服系統回路。同時對回路的整體功能、各液壓元件的功能和選型等,相關細節進行了介紹。通過建立液壓伺服控制系統仿真模型,確定了系統的穩定性,并進一步確定了增加超前校正網絡和改善相關參數等,可進一步增進系統的穩定性。通過設計合理的液壓伺服系統,可以實現對電機伺服系統的替代。
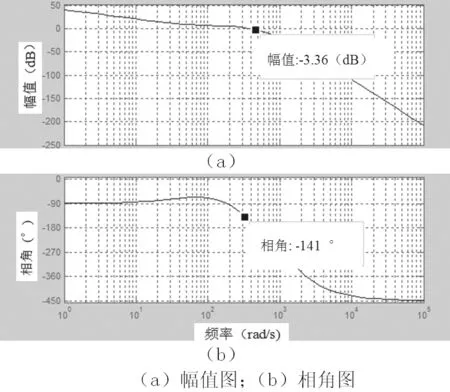
圖6 增加超前校正網絡后的液壓伺服系統開環伯德圖

圖7 減小開環增益后的液壓伺服系統開環伯德圖
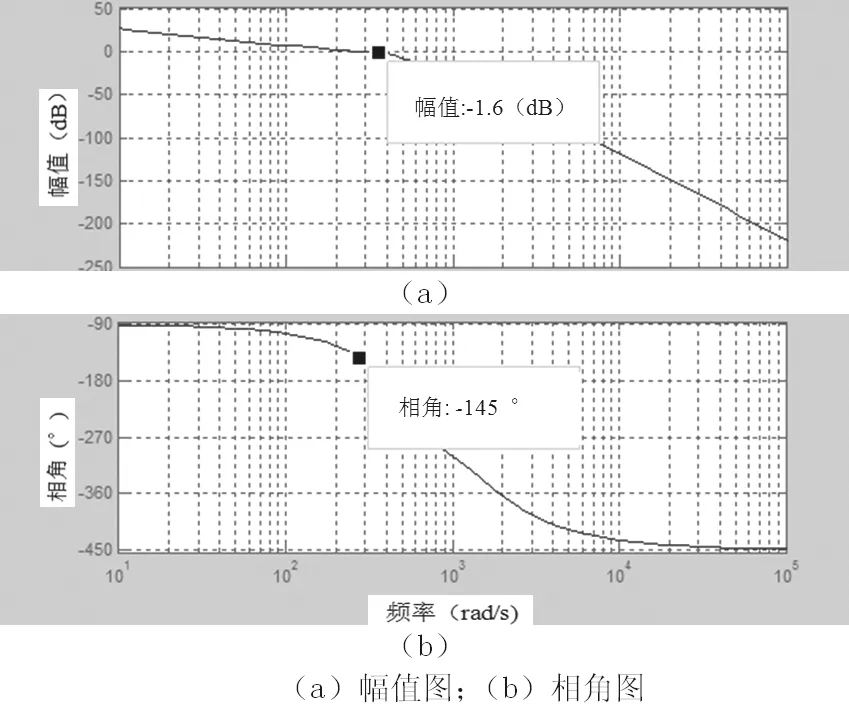
圖8 提高馬達排量后的液壓伺服系統開環伯德圖
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
