太和特大橋轉體橋施工技術
2018-02-23 15:34:32吳鵬
科技創新與應用 2018年6期
關鍵詞:分析
吳鵬
摘 要:結合商合杭高速鐵路太和特大橋上跨漯阜鐵路的工程特點,為確保鐵路運營安全,減少或消除對既有鐵路的影響,用以確保工程項目能夠安全、高效、高質量的完成施工結合工程項目的特點選用采用轉體橋施工方案。即先進行承臺、球鉸及牽引系統施工,并搭設支架澆筑墩身、連續梁,然后在封鎖要點后進行轉體,在鐵路上方合攏。文章以該工程為例對轉體橋施工技術與控制要點探討,旨在對今后類似工程上跨既有鐵路提供借鑒經驗。
關鍵詞:高速鐵路上跨鐵路;轉體橋施工技術;分析
中圖分類號:U445.4 文獻標志碼:A 文章編號:2095-2945(2018)06-0065-02
Abstract: In view of the engineering characteristics of the Luo-Fu railway overpass across the Taihe Grand Bridge of Shang-He-Hang High-speed Railway, and in order to ensure the safety of railway operation and reduce or eliminate the influence of the construction on the existing railway, so that the project can achieve a safe, efficient, and high-quality completion of the construction, we take advantage of the characteristics of the project and adopt the idea of bridge rotation construction technology, that is, we start with the construction of bearing platform, spherical hinge, and traction system going first, and set up the support to cast piers and continuous beams, and then rotate after blocking the key points, and close up above the railway. This paper takes this project as an example to discuss the bridge rotation construction technology and control points, in order to provide reference of experience for similar projects across existing railways in the future.
Keywords: railway overpass across high-speed railway; bridge rotation construction technology; analysis
1 工程概況
太和特大橋DK161+186.90~DK161+408.60段跨越漯阜鐵路,跨越結構采用(60+100+60)m轉體連續梁,主墩編號為215#墩、216#墩。位于界牌和小梁莊區間,歸屬武漢鐵路局漯阜公司管轄。
梁體現澆原設計采用懸臂法施工,因工期原因變更為支架現澆法施工,梁體共分2個T構進行,每個T構分2次澆筑,第一次澆筑長度為29.50m(A0#塊),第二次澆筑A1#及B1#塊長34.25m,其中A1#塊與B1#塊對稱同時澆筑。現澆完成后采用水平轉體法施工,轉體重量6688.1t,轉體角度34°。
2 工程特點及難點分析
本工程特點及難點為上跨既有漯阜鐵路,為避免對鐵路正常運行造成影響施工方案需要與武漢鐵路局方面進行溝通協商審核批準,施工時需武漢鐵路局相關部門進行配合,并改移影響施工的相關鐵路設施。在選用轉橋施工方案時轉體結構由轉體下轉盤(承臺)、球鉸、滑道、助推反力座、拽拉反力座、上轉盤(轉臺、轉體底座)、撐腳、墩柱、主梁、轉體牽引系統等組成。轉體重量6688.1t,通過設置轉動牽引系統,順時針同步轉動上轉盤34°至合攏段位置,和橋軸線重合。而轉動球鉸是轉動體系的關鍵工作,制作及安裝精度要求高,委托有資質的生產廠家加工。
3 轉體橋施工技術
轉體橋總體施工步驟為:樁基→承臺基坑支護→承臺(轉體下轉盤)施工,并安裝球鉸下盤及滑道→球鉸四氟乙烯片安裝,同時進行反力座施工→球鉸上盤安裝,保險撐腳安裝→轉臺及轉體底座(轉體上轉盤)施工→墩身施工→轉體連梁施工→轉體實施→合攏→封盤。轉橋施工方案中的關鍵部分在于轉體體系及轉體施工。
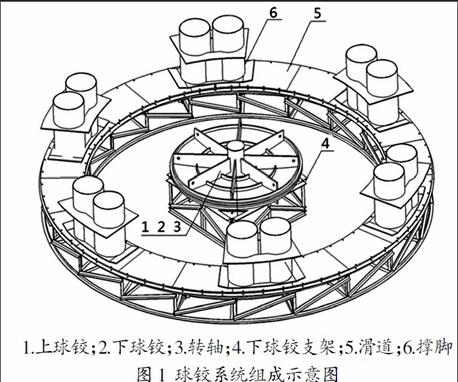
轉體結構設計情況:在轉橋轉體的選擇上選用轉盤球鉸直徑φ4100mm,下轉盤球鉸直徑φ3800mm,厚度均為40mm。對于轉體上轉盤撐腳部分設計采用每個上轉盤左右對稱各6組撐腳,每組撐腳采用為雙圓柱形外形結構,在撐腳下設30mm厚鋼板用以確保撐腳的穩固性。基于轉體時保險腿受力分析,轉臺兩保險腿應分布在同一中心線上,且6個保險腿應以轉體中軸線為分割形成左右各3組的分布。在撐腳的下方(即下盤頂面)設有1.1m寬的滑道,滑道中心線半徑4.5m,轉體時保險腿可在滑道內滑動,以保持轉體結構平穩。球鉸系統組成如圖1所示。
在球鉸系統中,上轉盤將在轉體系統中承擔重要的作用,其在運行的過程中受到多向、立體力的作用,為確保上轉盤的結構強度其上縱、橫及豎向都密布著預應力鋼筋用以加強結構強度。轉臺與球鉸、撐腳及上轉盤部分相連且在轉動的過程中牽引力將直接作用在其上。在轉體的牽引驅動上將采用2臺ZLDK主控臺、4臺ZLDB液壓泵站、4臺ZLD200智能連續轉體千斤頂所組成的系統來提供旋轉的動力。該系統分為自動和手動兩種模式分別應對正常轉體和距離運動。液壓驅動系統與轉體部分將采用24根直徑為Φ15.2mm的鋼絞線所組成,單根鋼絞線的拉伸強度能夠達到1860MPa。牽引索的一端埋入上轉臺混凝土內,作為固定端,外露端逐根順次沿著既定索道排列纏繞后,穿過ZLD200型連續轉體千斤頂作為張拉牽引端。在對于轉體橋轉體下盤(轉體大承臺)進行施工時,將采用C50混凝土來作為施工的重要材料,由于轉體下盤在轉體過程中將承受主要的轉體橋(約6688.1噸)的重量,并在轉體完成后與轉體結構的上轉盤構成轉體橋的支撐結構。在對轉體大承臺的混凝土結構施工時將按照以下施工工序進行:(1)首先完成轉體大承臺主體鋼筋結構的綁扎,而后進行混凝土的澆筑、養護。在施工完成后的轉體大承臺第一層混凝土結構頂面上預埋滑道和下球鉸骨架安裝角鋼。(2)在下滑道骨架和下球鉸骨架的安裝時注意控制兩者之間的相對高差≤5mm,骨架中心和球鉸中心的同心度需要控制在1mm以內。(3)而后進行預留槽兩側鋼筋的綁扎施工并進行模板的安裝,模板安裝完成后進行轉體大承臺的二次澆注,澆注過程中注意控制好預留槽混凝土高度。(4)為保障轉體橋的轉體效果,對于滑道鋼板的安裝平整度
≤0.5mm且相相對高差≤5mm,對于水平的調整依靠調整螺母來調整。第三次澆筑預留槽混凝土(下滑道鋼板下部和下球鉸預留槽),澆筑千斤頂反力座和轉體牽引反力座混凝土。
在球鉸安裝時將與轉體大承臺的三次澆注施工相配合進行安裝施工:首先在轉體大承臺第一次澆注施工時完成預埋件鋪設,并在固定的預埋件上完成下球鉸定位支架的安裝。完成了支架的安裝后將在其上安裝轉體微調裝置,吊裝球鉸下盤放在定位支架上并進行對中和調平,通過調節微調裝置精確定位球鉸下盤,球鉸下盤精定位后進行鎖定。球鉸中心度的誤差應當控制在1mm以內,對于球鉸水平的調整控制其誤差在1mm以內。待到下球鉸底部混凝土澆筑完成后將球鉸定位銷插入球鉸下盤預埋軸套中組成球鉸定位軸。對于后續的四氟乙烯滑動塊的安裝應控制其誤差<0.2mm。為減小滑動塊的摩擦需要在滑動塊上涂抹潤黃油四氟乙烯粉。完成了球鉸下盤的安裝后需要做好球鉸上盤的吊裝,吊裝時應確保定位銷套能夠與下盤上的定位銷上。吊裝過程中應當避免碰撞。完成吊裝后需要做好球鉸的密封避免雜物混入其中。轉體系統中所采用的3組撐腳采用的是由兩根直徑600mm、高1660mm的鋼管焊在厚30mm扇形鋼板上并在其中填充微膨脹混凝土用以形成的支撐結構。上轉盤將會承受多向、立體的力的作用,除采用預應力鋼筋加固外還需要使用P型錨具對其進行錨固。受力狀態,上盤布有縱、橫向預應力筋,采用單端張拉,錨固端采用。上轉盤施工分兩步:
(1)下部為0.8m厚、直徑為10.4m的圓柱臺,其中預埋兩對對稱于轉盤中心的牽引索;
(2)上部為14×10.8×2.6m的矩形臺,結構中心與球鉸中心重合,施工時預埋橫縱向預應力筋,達到強度以后進行預應力張拉。
轉體結構的索引力、安全系數及轉體時間的初步計算:
轉動過程中所需牽引力
T=2/3×(R·W·μ動)/D=488.7KN<2000KN。
4 轉體施工實施
4.1 轉體前施工準備
施工前與鐵路局簽訂安全協議,施工時成立轉體指揮小組,布置好測量觀測點、清理滑道,解除撐腳約束,安裝好助推千斤頂及反推梁,解除上轉盤約束,做好T構不平衡力測試及配重,并安裝好牽引索,做設備測試,確保儀器調試正常,在封鎖要點后進行施工。
4.2 試轉
在上述各項準備工作完成后,再次對轉體系統進行全面檢查用以確保轉動過程中的安全性。在轉體測試時做好每分鐘轉速的控制,在轉體測試過程中采用點動方式操作,轉體測試時做好各項數據的收集和計算確保轉體的速度和準確性在可控的范圍內。
4.3 正式轉體
在轉體正式運行時,啟動液壓系統按照100KN一級分級逐步加力,直至撐腳走板水平位移觀測確定啟動。在轉體過程中控制轉體橋的轉速。將其控制在一個均勻的速度,待到轉體進行到距離基本到位位置約1m處減速待到停止后采取點動轉體的模式,在這一過程中轉體控制人員需要與測量人員進行精確的配合,測量軸線,根據差值,精確點動控制定位,防止超轉。轉體就位后,精確調整轉體傾斜位置,并用型鋼將上下轉盤抄死。臨時墩墩頂與梁底先行抄死。防止梁體在外力作用下擺動。利用臨時墩墩頂上設置的千斤頂,精確地調整梁體端部標高,并采取措施抄墊。
5 結束語
橋梁轉體施工橋梁施工中的重點也是難點通過本次關鍵技術的施工控制,使整個轉體施工更加快速、簡便、安全、易控,減少對既有鐵路影響,并實現了該橋如期安全的轉體到位,是一項值得推廣的轉體工藝。
參考文獻:
[1]薛軍,任文祥.T形剛構大縱坡彎斜箱梁橋水平轉體施工技術[J].鐵道標準設計,2005(8):33-37.
[2]張順義.鋼管拱轉體施工解說貴州水柏鐵路北盤江大橋[J].文摘版:工程技術,2015(23):44-45.
[3]陶建山,任旭初,陳國祥.貴州水柏鐵路北盤江大橋鋼管拱轉體施工技術[J].橋梁建設,2001(2):50-53.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06