像袋鼠一樣蹦跳的月球探測器
2018-02-27 05:05:58遲惑
太空探索 2018年2期
文/ 遲惑
說起月球車,人們第一個想到的就是裝著4個輪子或者6個輪子,頂著一根光電桅桿,在月球表面慢慢爬行的無人車。如果看到一個方盒子在月球上一蹦一蹦的,很多人或許會說“這是什么鬼?!”
來自阿波羅和袋鼠的創意
其實,在月球上蹦跳是個腦洞與實踐相結合的創意。早在1967年,美國科學家凱普蘭和瑟菲特就設想了一種奇異的月球探測器“月球跳躍者”(Lunar Leaper)。它是兩個球體,一個球體是駕駛艙,一個是設備艙。兩球之間夾著一根長長的桿子,靠球體和桿子之間的相對運動來蹦跳著前進。當時,這個想法完全沒有進入人們的視野,因為阿波羅工程正在緊鑼密鼓地進行著。而當1969年人類第一次踏上月球,航天員們自己發明了月球徒步法——像袋鼠一樣蹦著走。之所以殊途同歸,是因為月球上的重力只有地球的六分之一,而且幾乎沒有大氣可言。蹦跳著前進既省力又方便。
多數人看到航天員們在月球上蹦跳,只是新奇一下就放過了,但澳大利亞科學家們卻產生了新的想法。就算他們想不到,全澳有3600萬只袋鼠肆無忌憚地蹦跳在市郊、鄉村,還經常蹦跳著穿過高速公路,時刻提醒他們:用蹦的行不行?
于是,澳大利亞昆士蘭州理工大學的科學家們設想了一種叫做LunaRoo的探月機器人,它的工作原理很容易理解,就是用一根彈簧推動著探測器、帶著相機,在月球上蹦跳。LunaRoo這個詞匯也和袋鼠的英語kangaroo的構詞法近似,我們可以把它叫做“月球袋鼠”。然而還要強調的一點是,kangaroo在澳大利亞土著人的語言中是“我不知道”的意思,那么LunaRoo會知道些什么呢?

▲ “月球袋鼠”在月球表面蹦跳的藝術想像圖
為什么要蹦
輪式月球車已經有很長的歷史。無論是在早期的無人任務中,還是在阿波羅探月期間,抑或是90年代以來的新一輪探月熱潮中,輪式月球車都是主力探測器。中國也部署了“玉兔”月球車,在很長時間里都是網紅。那么,探測器為什么要蹦跳?

▲ 蹦跳機構試驗
首先是站得高就能看得遠。由于火箭運力的限制,能送上月球的月球車體積都不會太大,因此光電桅桿的高度也是有限的。這就限制了輪式月球車的視野。如果能把相機送上更高的高度,就可以觀測到更加廣闊的范圍。這樣的拍攝往往是環月探測器的視野和視角所無法替代的。根據計算,在月球上,從1米高度觀察,可以看到1.8千米遠。而從20米高度觀察,可以看到8.2千米遠。
其次是越障能力強。一般來說,輪式車很難越過比自己輪子更高的垂直障礙物。對于電機功率有限的輪式月球車來說就更是如此,因此無人的輪式月球車需要植入避障算法,遇到大一點的巖石就要繞著走。而對于蹦跳機器人來說,只要彈跳能力夠強,跳過比自己高幾倍的障礙物不是什么問題。況且月球上重力比較小,跳高成績會比地球上好很多。
按照設想,“月球袋鼠”并不是單獨執行任務的,它要和固定式探測器、輪式月球車相配合,一起從地球發射,然后一起降落在預定地點。“月球袋鼠”的體積和功率限制了它的通信能力,因此它拍攝的圖像要通過固定式月球探測器中轉才能發揮地球。當然,“月球袋鼠”也可以為輪式月球車起到很大作用。我們在前面說到,輪式月球車遇到大一點的障礙物就必須繞著走。但是障礙物后面有什么?是不是有懸崖、陡坡或者其他的危險地形?有沒有環月探測器沒能拍清楚的障礙物?“月球袋鼠”可以先蹦上半空,為這些問題提供給解答,也為輪式月球車規劃路線提供參考,擴大后者的活動范圍。當輪式月球車越走越遠,“月球袋鼠”也可以一躍而起,在固定式探測器、輪式月球車之間中轉信息。
一條腿的“月球袋鼠”
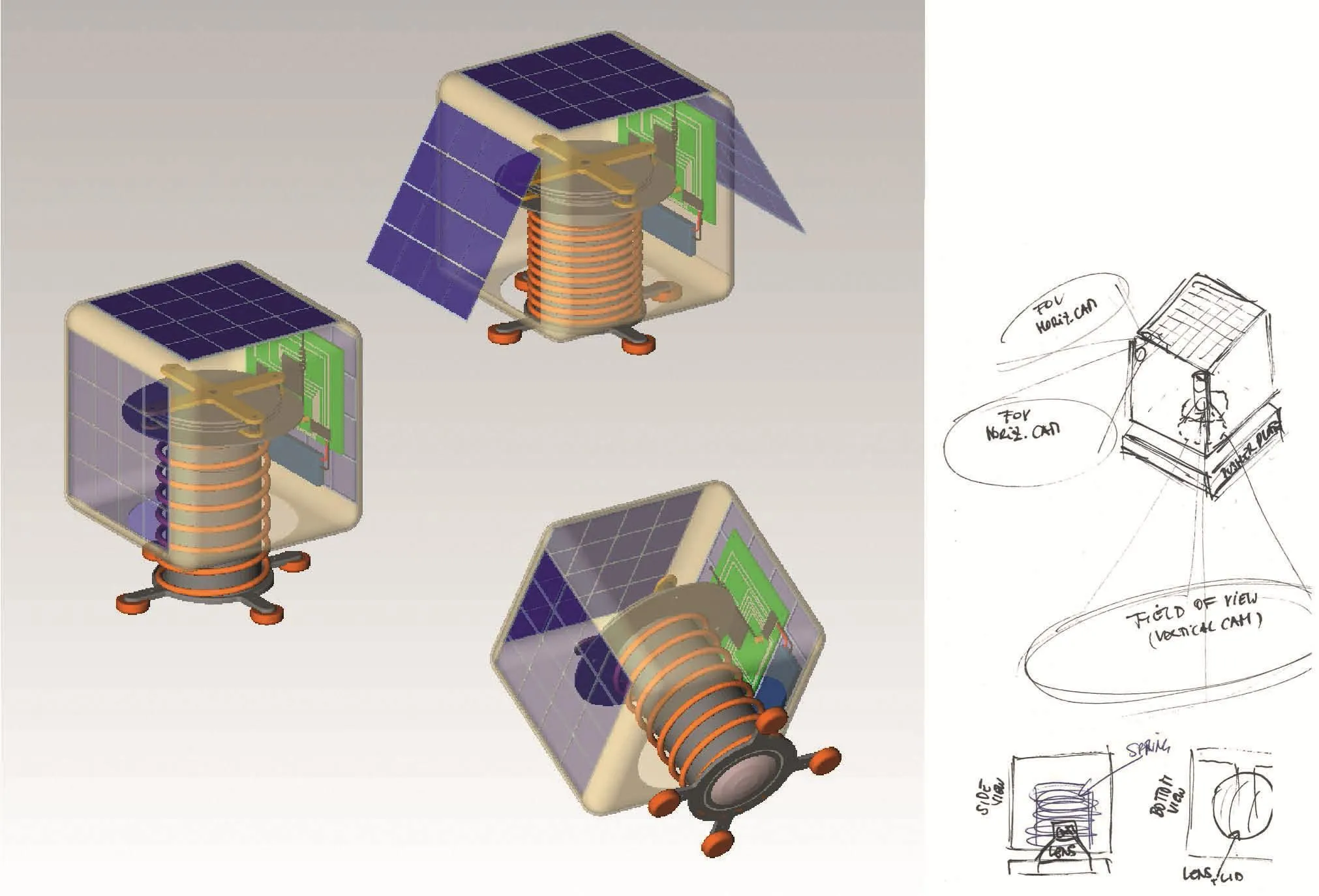
袋鼠是四條腿的動物,前腿弱、后腿強,還有一條強壯的尾巴來作為平衡。但是人類目前還沒有制造出能夠完全模仿袋鼠運動的機器人,而且對于“月球袋鼠”的發起者來說,也沒有那么多經費去搞這樣復雜、這樣大的機器人,于是他們提出的“月球袋鼠”只有1U立方星大小,適合于搭載發射。
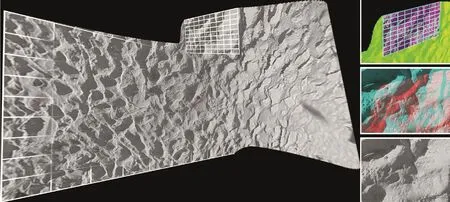
▲ 圖像拼合算法
這個方塊形“月球袋鼠”的質量只有1.3千克,但是可以在月球上達到20米的蹦跳高度!它的有效載荷是裝在頂部的兩臺相機。而用來蹦跳的腿,就只能在這個10厘米見方的小塊里占據很小的空間。所以,昆士蘭理工大學的發明家們只給它設計了一條腿。嚴格來說,這條腿是一個伸縮機構,下面有一個方型的抓地板。伸縮機構以彈簧為動力,釋放彈簧,“月球袋鼠”就跳躍起來。作為一個創新型號,如果“月球袋鼠”能夠得到飛往月球的機會,只要蹦跳一次就算任務成功。不過團隊還是希望能夠做到更多。按照設計,發射時彈簧是壓縮起來的,這樣至少可以保證第一次釋放的成功。當第一次蹦跳結束后,將由一臺大扭矩電機帶動一個絲杠機構,再次壓縮彈簧,為下一次蹦跳做準備。
這樣的機構,能放進一個立方星嗎?月球表面的重力加速度是1.622米每二次方秒,按照1.33千克的質量計算,如果要讓它跳躍到20米高度,初速度需要達到8米每秒。那么就需要在彈簧力儲存43焦耳的能量,根據所選擇的彈簧,需要用1702牛頓的力量壓縮。考慮到絲杠系統的作用,這個數字還是可以達到的。
為了滿足強度需求,“月球袋鼠”的整個結構是用鈦合金制造的,只有少部分高強度零件采用了不銹鋼。
電機自然需要用電,月球上沒有大氣層,強烈的陽光可以直接照射在表面上。這為探測器采用太陽能發電創造了良好的條件。陽光照射到月球上的能量強度大約是1000瓦每平方米,假設太陽電池的轉換效率是20%。那么,如果僅僅在“月球袋鼠”的上表面貼太陽電池,1平方分米的面積可以實現兩瓦的輸出,24小時可以發電172.8千焦,給馬達供電來壓緊彈簧是足夠的。況且,這樣的試驗項目,一天能蹦一次就算頻率很高了。
落地要站穩
其實對于“月球袋鼠”來說,跳起來不是什么大問題,怎么落地才是麻煩。首先,本體在半空中要保持平衡,如果歪著或者倒著落地,就會摔壞設備,也無法進行下一次蹦跳了。
因此,團隊考慮在“月球袋鼠”內部設置一些機構,用來控制空中飛行的姿態,讓它以平穩的方式降落在月面上。考慮到陀螺、反作用飛輪和動量輪用于衛星姿態控制已經是很成熟的技術,“月球袋鼠”在空中保持平衡不會是很困難的任務。
落點的地形也會影響落地姿態,落在平坦的月面上當然皆大歡喜,如果有塊石頭怎么辦?地面松軟、不平整怎么辦?團隊考慮,可以先實施一次原地蹦跳,拍攝照片。從照片中選擇一個合適的落點位置,再上緊彈簧,向那里蹦去。有關的避障算法倒是現成的,從無人水下潛航器那里就可以借用。
團隊還考慮到了極端的情況——“月球袋鼠”終于摔倒了。如果沒有人類干預,它自己不可能站起來。這時候,它還是可以運動的,用唯一的那一條腿橫著蹬踏月面,在月球上爬行!
拍照要清晰
說到這里,我們已經可以發現,“月球袋鼠”實際上是一個低成本的小項目,研制單位沒有太多經費可以投入。實際上,團隊僅僅是向大學申請了一筆錢。雖然昆士蘭州理工大學的校長對此很支持,學校在機器人領域也很有建樹,但畢竟不可能采取國家航天局那種財大氣粗的玩法。所以,團隊盡一切可能采用成熟的商業現貨,最好是消費級的產品。
至于圖像拼合算法,那更是非常成熟,衛星遙感界早就解決了各種關鍵技術和算法,直接拿來就可以了。火星車上的一些避障算法,也可以用在“月球袋鼠”上。根據這些算法可以得到一張網格狀地圖,輪式月球車可以行駛的區域用藍色標注,不能去的地方標注成紅色。
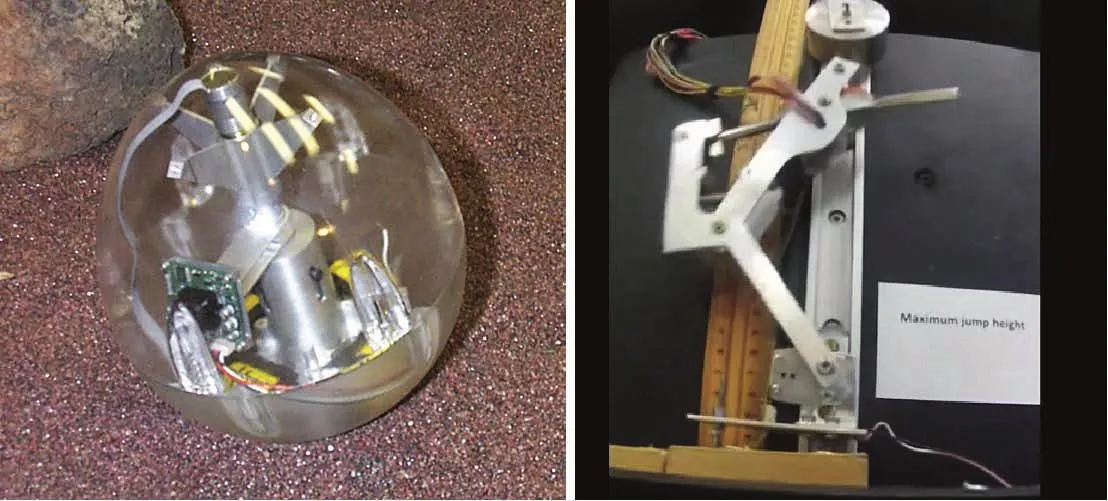
▲ 蹦跳機構樣機
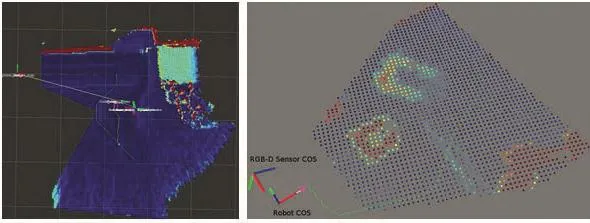
▲ 三維導航地圖
“月球袋鼠”的拍攝工作,都是在運動中完成的。根據運動方程可以知道,在剛剛起跳和剛剛著陸的時候,運動速度是最快的。這就給拍攝和圖像處理算法帶來了一定難度——誰都知道,相機一晃就拍模糊了。不過他們還真的從消費市場找到了這種解決方案。團隊根據月球的重力加速度測算出了不同蹦跳高度下的運動方程,發現市售的運動相機完全可以滿足拍攝需求,于是就找來這么一個設備裝進了樣機里。
蹦跳著照相也帶來了另一個問題。“月球袋鼠”只有10厘米高,相機到月面的高度也就是幾個厘米。雖然月球上沒有大氣,不會持續揚塵,但是起跳和落地時激起的灰塵還是有可能污染鏡頭。如果設計一個鏡頭清潔機構,就超過了重量限制。所以,團隊設計了一個鏡頭蓋,與彈簧聯動。釋放彈簧起跳的同時,蓋子打開,當落到地面時再蓋上。只要機械加工精度有保證,這樣的機構可靠性是有保證的。
試驗目標
團隊給“月球袋鼠”定下了一些主要目標和附加目標。主要目標有以下幾個內容。
第一階段:安全部署到月球表面,頭上腳下地站立在主探測器上,準備第一次蹦跳;能夠與地球上的團隊建立起通信聯系。
第二階段,在月球上成功地蹦跳,首先釋放壓縮的彈簧,跳到3米以上的高度,傾角不超過20度;落地時,整個“月球袋鼠”的結構和設備能經受住沖擊。能把蹦跳期間獲得的數據和圖像發回任務控制中心。
第三階段是驗證地形建模能力,需要相機能夠在蹦跳期間,每秒至少拍攝和存儲3張照片;能把蹦跳期間拍攝的所有照片拼合成一張大圖;運動拍攝模式下,可以用拍攝到的影像形成立體地形圖,這對任務控制和其他研究是有用的;利用拼合大圖和立體地形圖形成一張用于月面旅行的“危險物地圖”;把“危險物地圖”傳回輪式月球車。
如果上述主要目標得以實現,團隊還設置了后續任務目標。例如從半空中觀察輪式月球車,躍起之后能拍到并回傳至少一張輪式月球車的照片;特別是能拍攝到輪式月球車行駛期間的連續照片,具體要求是連續5秒、每秒5幀,然后傳回任務控制中心。這樣的圖像可以用來分析輪式月球車車輪與月壤之間的相互作用。
最后一項任務是連續蹦跳,看一看用太陽電池提供的電力,“月球袋鼠”最多能蹦到多高。
澳大利亞雖然是個人口小國,但大學的科研水平都不錯。昆士蘭理工大學的機器人專業在全世界都排得上號。據團隊自己介紹,昆士蘭理工大學可以在全球排進前50名。研制工作還得到了澳大利亞機器人可視化中心的幫助,提供了有關的計算機圖像技術。團隊根據這項技術,用一個小型無人機直升機加上立體相機、低成本慣性敏感器、低功耗處理器等設備制作了樣機。
如果“月球袋鼠”成功,昆士蘭理工大學的團隊當然打算進一步研制更大、更復雜的型號。他們沒有說明,自己是不是打算把“月球跳躍者”的理想變成現實。但是,有什么不可以呢?★